

I. 서 론
II. Partial Coherence Function
2.1 부분상관 함수
2.2 일반상관 함수와 부분상관 함수의 비교
2.3 일반상관 함수와 부분상관 함수의 비교
2.4 기여도 영역 세분화 및 계산방법
III. 결 론
I. 서 론
함정 수중방사소음은 함정의 피아식별 및 자체 소나 운용에 있어 매우 중요한 요소이다. 따라서 함정의 수중 방사소음 저감을 위한 많은 연구가 수행 되고 있다.[1] 일반적으로 함정 수중 방사소음은 유체기인 소음과 구조기인 소음으로 나눌 수 있다.[2] 유체기인 소음의 경우 특정속도 이상에서 프로펠러에서 발생하는 캐비테이션으로 인한 소음이 대표적이다. 구조 기인소음은 선체의 굽힘 및 비틀림과 같은 진동모드로 인한 저주파수 소음과 엔진, 펌프 등의 보기류 장비의 진동이 선체 외판을 가진 하여 외판 진동에 의하여 수중으로 방사되는 소음이다. 유체기인 소음은 주로 고속 운행 시 지배적으로 발생하며, 구조기인 소음은 저속 운행 시 지배적이다.
일반적으로 유체기인 소음을 저감하기 위한 방안으로는 프로펠러 형상변경, counter-rotating 프로펠러 시스템 그리고 Prairie 시스템 적용 등이 존재한다.
구조기인 소음을 저감하기 위해서는 진동 기진력 저감을 위한 엔진 및 보기류 장비의 절연특성 강화 또는 전달경로 및 소음원 분석을 통한 진동저감 방안이 존재한다.
본 논문에서는 함정의 구조기인 소음 저감을 위한 전달경로 분석법에 대한 연구를 수행하였다.
보편적으로 많이 사용되는 전달경로 분석법에는 전통적 전달경로 분석법(Transfer Path Analysis, TPA), 작동중 전달경로 분석법(Operational Transfer Path Analysis, OTPA), 부분상관 함수를 이용한 기여도 분석법이 있다. 이 중 전통적 전달경로 분석법, 작동중 전달경로 분석법의 경우 소음, 진동 시스템을 선형 시스템으로 가정하고 소음·진동원과 출력 사이의 전달함수 및 전달률을 활용하여 소음·진동원 특성을 규명한다. 그리고 규명된 소음·진동원과 전달함수 및 전달률사이의 관계를 활용하여 전달경로 및 기여도를 평가하는 방법이다.[3,4]
부분상관 함수를 이용한 기여도 분석법의 경우 앞서 전통적 전달경로 분석법, 작동중 전달경로 분석법과는 다르게 소음·진동원의 특성을 규명하지 않고 소음·진동원, 출력 신호 간의 관계를 통한 전달경로 및 기여도 평가를 실시하는 방법이다.[5]
본 논문에서는 여러 가지 전달경로 분석법 중 부분상관 함수를 이용한 기여도 분석법에 대하여 해당 방법의 문제점을 제시하였다. 그리고 이에 대한 개선 방안을 제시 및 검증 하였다.
II. Partial Coherence Function
2.1 부분상관 함수
Fig. 1과 같은 잡음이 존재하며 입출력간의 주파수 상관성분이 존재하지 않고, 다중입력과 단일출력을 갖는 시스템에 대하여 출력의 자기 스펙트럼  를 계산할 경우 출력단의 잡음성분
를 계산할 경우 출력단의 잡음성분  를 포함하는 값이 계산된다. 이때 잡음을 제거한 스펙트럼을 계산하기 위해서는 Eq.(1)과 같은 방식을 이용하여 계산할 수 있다. 이때 잡음을 제거한 순수한 출력을
를 포함하는 값이 계산된다. 이때 잡음을 제거한 스펙트럼을 계산하기 위해서는 Eq.(1)과 같은 방식을 이용하여 계산할 수 있다. 이때 잡음을 제거한 순수한 출력을  라 정의한다.
라 정의한다.
 (1)
(1)
이때  ,
, 는 시스템 각각 입력과 출력사이의 일반상관 함수이다. 그리고
는 시스템 각각 입력과 출력사이의 일반상관 함수이다. 그리고  ,
, 는 입출력의 자기 스펙트럼,
는 입출력의 자기 스펙트럼,  는 입출력간의 상호 스펙트럼이다. 따라서 Eq.(1)에서 확인 할 수 있듯이 일반적인 다중입력과 단일출력을 갖는 시스템에서는 각각 입력과 출력간의 일반상관 함수를 이용하여 시스템의 기여도평가가 가능하다.
는 입출력간의 상호 스펙트럼이다. 따라서 Eq.(1)에서 확인 할 수 있듯이 일반적인 다중입력과 단일출력을 갖는 시스템에서는 각각 입력과 출력간의 일반상관 함수를 이용하여 시스템의 기여도평가가 가능하다.


하지만 Fig. 2와 같이 각각의 입력사이에 주파수 상관관계가 존재하며 다중입력과 단일출력을 갖는 모델의 경우 Eq.(1)과 같은 일반상관 함수를 이용한 기여도 평가가 불가 하다. 이는 일반상관 함수의 경우 각각의 입력사이의 상관성을 고려하지 않기 때문에 Eq.(1)에서 일반상관 함수의 합이 1을 넘게 된다. 이것은 순수한 출력이 잡음을 포함한 출력보다 큰 것을 의미하며, 물리적으로 타당하지 않다. 따라서 이를 해결하기 위해서는 각각의 입력신호에 대한 상관성분을 제거 후 순수한 입력과 출력간의 기여도를 계산하는 부분상관 함수를 계산하여야 한다.
이를 위해 각각의 입력신호에 대한 상관성분을 제거한 잔차스펙트럼을 계산하여야 한다. i 번째 입력에 대하여 r번째 입력까지의 상관성분을 제거한 잔차 스펙트럼 는 다음과 같이 나타낼 수 있다.
는 다음과 같이 나타낼 수 있다.
 (2)
(2)
여기서  은 각각의 입력신호 사이의 상관성분,
은 각각의 입력신호 사이의 상관성분,  는 상관성분이 제거된 입력간 또는 입출력 사이의 최적전달함수를 뜻한다. 이때 잔차 스펙트럼을 계산하기 위해서 시스템 입력간의 입력순서를 선정하는 것은 매우 중요하다.
는 상관성분이 제거된 입력간 또는 입출력 사이의 최적전달함수를 뜻한다. 이때 잔차 스펙트럼을 계산하기 위해서 시스템 입력간의 입력순서를 선정하는 것은 매우 중요하다.
한편 부분상관 함수를 계산하기 위하여 각각의 입출력 사이의 잔차 자기 스펙트럼  및 잔차 상호 스펙트럼
및 잔차 상호 스펙트럼  를 계산 할 필요가 있으며 이는 Eq.(3)와 같이 나타낼 수 있다.
를 계산 할 필요가 있으며 이는 Eq.(3)와 같이 나타낼 수 있다.
 (3)
(3)
Eq.(3)를 통해 계산한 잔차 스펙트럼을 활용하여 입력간의 상관성분을 제거한 부분상관 함수는 다음과 같이 나타낼 수 있다.

이때  는 i번째 입력과 출력사이의 상관성분을 모두 제거한 부분상관 함수이다. 또한
는 i번째 입력과 출력사이의 상관성분을 모두 제거한 부분상관 함수이다. 또한  ,
, ,
, 의 경우 입출력간의 자기, 상호 스펙트럼이다.
의 경우 입출력간의 자기, 상호 스펙트럼이다.
앞서 일반상관 함수와 부분상관 함수는 시스템에 존재하는 각각의 입력과 출력사이의 기여도를 평가하는 함수이다. 이와는 다르게 시스템 전체 입력과 출력사이의 기여도를 평가하기 위해서는 다중상관 함수가 사용된다. 이에 따라 Eq.(1)에서 일반상관 함수의 합을 다중상관 함수로 표현할 수 있으며 이는 다음과 같다.
 ,
,
 , (5)
, (5)
여기서  는 총 시스템에서 i번째 입력까지의 다중상관 함수를 뜻한다.
는 총 시스템에서 i번째 입력까지의 다중상관 함수를 뜻한다.
2.2 일반상관 함수와 부분상관 함수의 비교
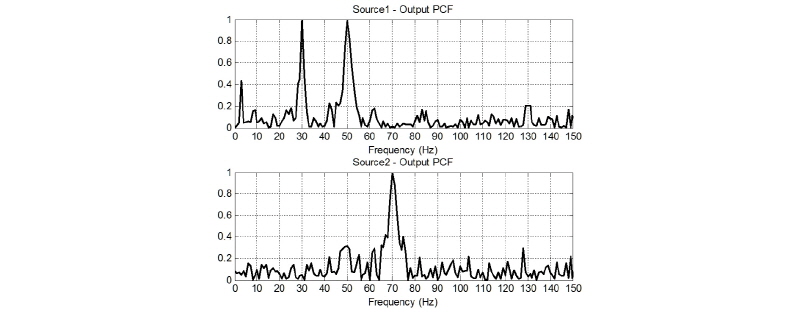
본 연구에서는 정현파로 구성된 임의의 다중입력과 단일출력을 갖는 시스템을 모델링 하였고, 이를 Table 1에 나타내었다. 이때 Case2의 Source2의 50 Hz 신호의 경우 Source1에 의하여 영향을 받은 주파수 이다. 모델링된 시스템의 경우 모든 입력과 출력사이의 전달함수는 1이며, SNR이 15 dB인 백색 잡음을 포함하고 있다. 이러한 시스템에 대하여 앞서 기술한 일반상관 함수를 이용한 기여도 평가법과 부분상관 함수를 이용한 기여도 평가법의 비교 하고자 한다.
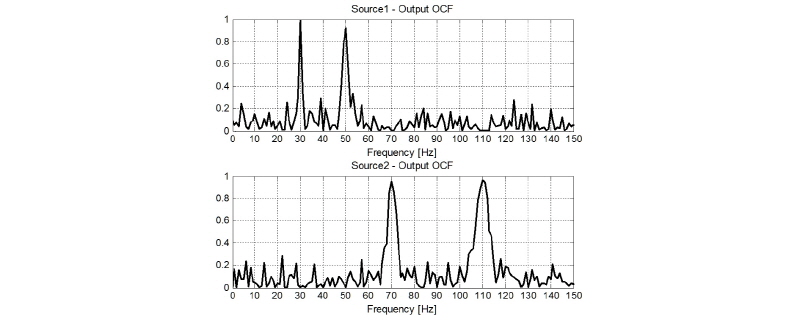
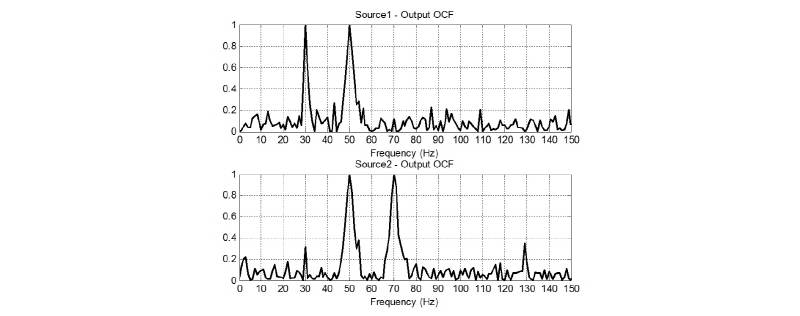
Fig. 3에서 확인할 수 있듯이 상관성분이 없는 시스템에 대하여는 일반상관 함수를 이용한 기여도 평가가 가능하다. 하지만 Fig. 4와 같이 상관성분이 존재하는 시스템의 경우, 상관주파수인 50 Hz에서 Source1과 Source2의 기여도가 모두 높게 평가되는 오류가 발생하였다. 이를 해결하기 위하여 부분상관 함수를 이용한 기여도 평가를 실시하였다. Fig. 5에서 확인할 수 있듯이 상관주파수인 50 Hz에서 Source1의 기여도가 높고 Source2의 기여도는 낮게 평가되는 것 을 확인 할 수 있었다. 따라서 입력간의 상관성분이 존재할 경우 부분상관 함수를 이용한 기여도 평가가가 적절함을 알 수 있었다.
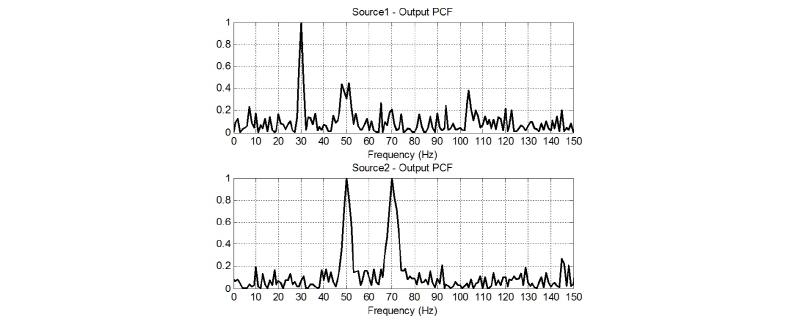
2.3 기존 입력 순서 선별법
앞서 2.1절에서 부분상관 함수 계산 시 시스템 입력간의 입력순서를 선정하는 것이 매우 중요하다고 기술 하였다. 이를 확인하기 위하여 앞서 Table 1에서 제시한 MISO시스템에 대하여 입력순서를 1→2 이 아닌 2→1로 선정할 경우의 기여도 평가를 Fig. 6에 나타내었다. 상관주파수인 50 Hz의 기여도가 Source1이 아닌 Source2의 기여도로 잘못 평가된 것을 확인 할 수 있었다. 일반적으로 시스템 입력간의 순서를 정하는 기준은 각각의 입력 간 일반상관 함수를 계산하고 그 값이 큰 순서로 입력 순서를 선정한다. 하지만 통상적으로 각각의 입력간의 주파수 상관성분이 존재할 경우 일반상관 함수에 대한 유의차를 갖기 어렵다. 따라서 적절한 입력순서 선정의 어려움이 존재한다.
2.4 기여도 영역 세분화 및 계산방법
2.3절에서 기술한 것과 같은 이유로 입력순서 선정에 대한 어려움이 존재한다. 이러한 문제를 해결하기 위하여 Choi et al.[6]는 기여도 영역을 세분화 하여 각각 입력간의 독립된 영역, 공통된 영역의 기여도를 평가 하였다. 하지만 이전의 연구의 경우, 3개 이상의 입력에 대한 기여도 평가를 함에 있어 계산과정의 어려움이 존재한다. 따라서 본 연구에서는 이를 일반화하기 위한 계산 알고리즘을 제안하고자 한다.
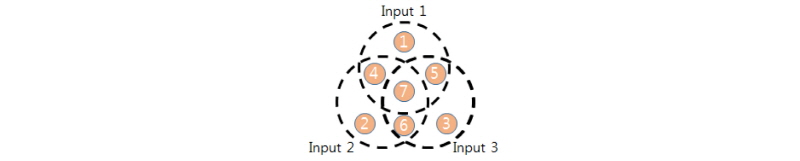
본 연구에서는 Fig. 7과 같은 세 개의 입력과 단일출력을 갖는 시스템을 예로 들어 세분화된 기여도 평가 방법을 설명하고자 한다. Fig. 7에서 ①, ④, ⑤, ⑦ 영역의 기여도 합은 1번 입력과 출력사이의 다중상관 함수가 된다. 동일한 방법으로 2번, 3번 입력에 대해서도 표현할 수 있다. Fig. 7에서의 ①, ②, ④, ⑤, ⑥, ⑦ 영역의 합은 1, 2번 입력과 출력 사이의 다중 기 상관 함수가 된다. 동일한 방법으로 2, 3번 입력, 1, 3번 입력에 대해서도 표현할 수 있다. 마지막으로 Fig. 7에서 모든 기여도 영역의 합은 1, 2, 3번 함수와 출력사이의 다중상관 함수가 되며 모든 기여도 영역의 조합을 Table 2에 나타내었다. 그리고 Table 2를 행렬식으로 나타내면 Eq.(6)과 같다.
Table 2. Multiple coherence function. | |||
Contribution Area | MCF | Contribution Area | MCF |
①+④+⑤+⑦ |
| ①+③+④+⑤+⑥+⑦ |
|
②+④+⑥+⑦ |
| ②+③+④+⑤+⑥+⑦ |
|
③+⑤+⑥+⑦ |
| ①+②+③+④+⑤+⑥+⑦ |
|
①+②+④+⑤+⑥+⑦ |
| ||







 . (6)
. (6)
Eq.(6)과 같은 행렬식에서 기여도 영역을 계산하기 위해서는 다음과 같이 기여도 특성행렬의 역행렬을 계산해주면 세분화된 영역에서의 기여도를 계산할 수 있다.
 (7)
(7)
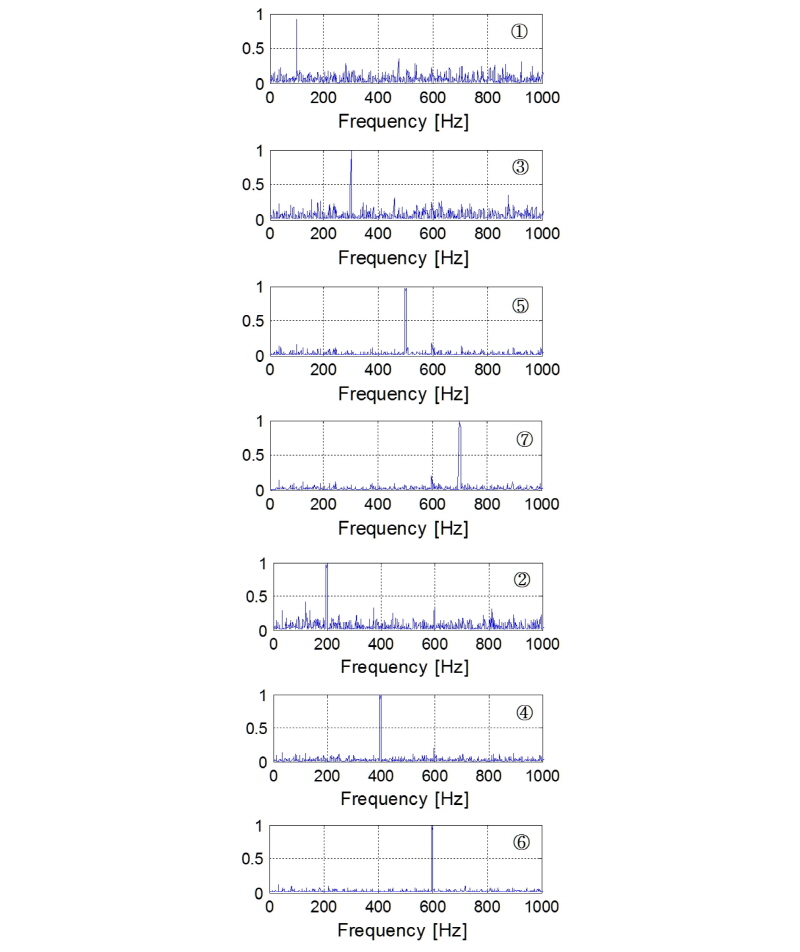
제시한 기여도 계산방법을 검증하기 위하여 본 연구에서는 Table 3과 같은 가상의 정현파 신호를 이용하여 3개의 입력과 단일출력을 갖는 시스템을 구성하였다. 그리고 앞서 다중상관 함수에 대한 기여도 특성행렬의 역행렬 계산을 통해 각각 기여도 영역의 기여도를 계산하였고 이를 Fig. 8에 나타내었다. 각각의 기여도 영역에서 해당 주파수의 기여도가 높게 평가됨을 확인 할 수 있었다. 따라서 제시한 방법의 타당성을 확보하였다.
입력이 3개 이상 존재하는 시스템일 경우, 직관적으로 기여도 특성행렬 및 다중상관 함수 벡터의 구성을 만들기 어렵다. 따라서 본 연구에서는 기여도 특성행렬을 구성하기 위한 알고리즘을 제안하였고 이를 Fig. 9에 나타내었다. 이때 Fig. 9의 기여도 영역 수 M의 계산 방법은 다음과 같이 나타낼 수 있다.
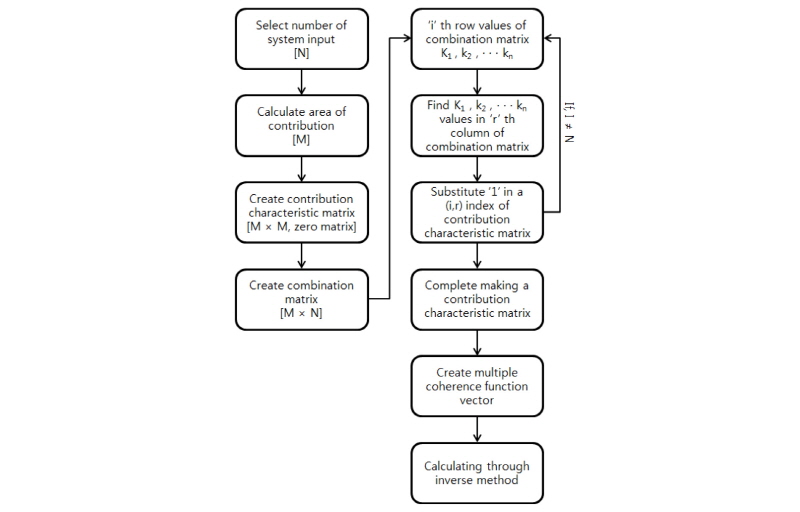
 , (8)
, (8)
여기서 n은 시스템 입력의 개수이다.
제시한 알고리즘을 사용하여 기여도 특성행렬을 구성한다면 3개 이상의 다중입력에 대한 기여도 분석을 실시할 수 있다.
III. 결 론
본 연구에서는 함정의 수중 방사소음 저감을 위하여 소음·진동원의 기여도 평가기법에 대한 연구를 수행하였다. 그 중 부분상관 함수를 이용한 기여도 분석에 있어 입력순서 선정에 따른 기여도 분석결과의 불확실성을 해결하였다. 이를 위해 기여도 영역을 세분화하여 공통의 기여도, 독립기여도로 기여도를 평가하는 방법을 제시하였다. 그리고 서로 상관성분이 존재하는 정현파 신호로 구성된 가상의 다중입력과 단일출력을 갖는 시스템에 대하여 제시한 방법을 검증하였다. 그 결과 각각의 기여도 영역에서 정확한 기여도 값을 도출하는 것을 확인함으로써 제시한 방법의 타당성을 확보 하였다. 또한 3개 이상의 입력이 존재하는 시스템에 대한 기여도 특성행렬 구성 알고리즘을 제안하였다.
본 연구에서는 가상의 정현파 신호 시스템에 대하여 제시한 방법을 적용하였으나, 향후 실선에 대하여 해당 방법을 이용한 기여도 평가를 실시 및 재검증 할 예정이다. 실선 시험에 대한 검증 여부에 따라 본 논문에서 제시한 소음·진동 기여도 평가방법을 활용하여 함정의 구조기인소음에 적용한다면 효율적인 수중방사 소음 저감이 가능 할 것으로 판단된다.
