

I. 서 론
잠수함이나 어뢰와 같이 수중에서 은밀하게 움직이는 표적을 조기에 탐지하기 위해 해군에서 일반적으로 사용하는 수중음향탐지 장비는 함정 하부에 부착된 능동음탐기와 함정 후미에서 예인 운용하는 예인 선배열 음탐기이다. 이중에서 수중표적의 장거리 탐지를 위해서는 저주파 탐지 능력이 상대적으로 뛰어난 예인 선배열 음탐기가 주로 사용된다. 예인 선배열 음탐기의 핵심 구성품인 선배열 센서는 일반적으로 구형 또는 원통형의 하이드로폰을 다채널로 구성하여 표적탐지 능력이 뛰어난 장점이 있으나, 표적의 좌우 구분을 위해 별도의 함정기동분석을 위한 시간이 필요한 한계가 상존한다. 이는 선배열 센서를 구성하는 하이드로폰이 음파의 크기만 감지하는 스칼라 센서이기 때문이며, 음파의 크기와 방향을 동시에 감지하는 센서인 벡터 하이드로폰[1]의 필요성이 점차 높아지고 있다.
음파의 크기와 방향을 동시에 감지하기 위한 연구는 수중에서 직접 입자속도를 측정하기 위한 연구결과[2]가 1956년에 발표된 이래 최근까지 지속적으로 진행되어 왔다. 벡터 하이드로폰은 무지향 빔패턴과 쌍극자 빔패턴[3]을 합성하여 최종적으로 입사된 음파에 대해 심장형 빔패턴[4] 출력을 나타낸다. 이러한 쌍극자 빔패턴 형성을 위해 다양한 형태의 센서 구조가 제안되었는데, 함정 후미에서 예인되는 선배열 센서에 적용 가능한 구조는 크게 다중 모드형 벡터 하이드로폰과 관성형 벡터 하이드로폰으로 구분할 수 있다.
다중 모드형 벡터 하이드로폰은 무지향 빔패턴 특성을 가지는 구형 또는 원통형 하이드로폰을 몇 개의 조각으로 나눈 후, 조각난 각각의 하이드로폰의 출력특성을 조합하여 특정한 방향으로 높은 수신감도를 가지는 쌍극자 빔패턴을 만들고, 무지향 빔패턴과의 조합을 통해 심장형 빔패턴을 구현한다. Ko et al.이 1974 년에 구형의 압전 세라믹을 8개의 조각으로 나누어 쌍극자 빔패턴을 구현한[5] 이후로 Gordon et al.은 2조각을 낸 원통형 압전 세라믹에 대한 등가회로를 구성하였고,[6] Butler et al.이 구형 및 원통형 압전 세라믹을 분할한 다중 모드형 벡터 하이드로폰에 대한 연구를 활발하게 진행하였다.[5-7] 나아가 Butler et al.은 몇 개의 분할된 원통형 압전 세라믹을 적층하여 음향 송수신 능력을 향상시킨 지향성 트랜스듀서를 개발하여 수중통신에 적용하였고,[8,9] McConnell et al.은 각각 4개와 8개로 분할된 원통형 하이드로폰의 1차 및 2차 쌍극자 빔패턴 특성을 분석하고 미 해군의 수중음향탐지 장비에 적용한 바 있다.[10] 국내에서도 최근 구형 및 원통형 다중 모드 벡터 하이드로폰에 대한 연구가 활발히 이루어지고 있다.[4,11,12] Roh et al.은 음향신호 송수신을 위해 널리 사용되는 Tonpilz형 트랜스듀서의 전면추를 분할하여 음파의 크기와 방향을 동시에 감지하는 Tonpilz형 벡터 하이드로폰을 최초로 제안하기도 하였다.[13,14]
이와 같은 다중 모드형 벡터 하이드로폰은 일반적으로 많이 사용하는 구형 및 원통형 하이드로폰을 활용하기에 비교적 제작이 간편하고 선배열 센서에 적용하기 위한 센서 전자부도 많이 개발되어 있어 손쉽게 수중음향탐지 장비에 적용할 수 있다. 그러나, 분할된 각각의 조각에 입사되는 음파의 위상 차이를 이용하여 방향을 검출하기 때문에 저주파 영역으로 갈수록 하이드로폰의 크기가 커져야하는 단점이 있다. 최근 이러한 한계를 극복하기 위한 다양한 신호처리 기법이 연구되고 있으나,[15] 수 백 Hz 이하의 저주파 대역을 탐지하고자 하는 시스템에는 적용하기 어려운 한계가 있다.
따라서 별도의 신호처리가 필요없이 센서 자체로 입자 속도를 측정하여 저주파 대역에서도 방향 정보를 획득하기 위한 연구가 다양하게 진행되었다.[16,17] 일례로 2000년대에 가속도 센서의 쌍극자 빔 패턴과 구형 또는 원통형 하이드로폰의 무지향 빔 패턴을 합성하여 심장형 빔 패턴을 형성하는 관성형 벡터 하이드로폰을 선배열 센서에 적용하는 연구가 미국을 중심으로 활발하게 진행되었다. Silvia et al.은 압전 세라믹 가속도 센서 기반의 벡터 하이드로폰으로 미국의 Seneca 호수에서 50 ~ 2,000 Hz 대역의 음향 수신특성을 측정하였고,[18] Shipps et al.은 선배열 센서에 적용하기 위한 관성형 벡터 하이드로폰의 사양을 제시하고 PMN-PT 단결정 가속도 센서를 적용한 벡터 하이드로폰의 성능을 평가하였다.[19] McConnel은 구형의 하이드로폰 내에 가속도 센서를 장착한 관성형 벡터하이드로폰을 수학적으로 모델링하고, 외부 유체의 밀도 및 점도 변화에 대한 영향을 고찰했고,[20] Kim et al.은 직경 38.1 mm의 원통형 하이드르폰 내에 가속도 센서를 장착한 관성형 벡터 하이드르폰의 중성부력 상태에서의 음향수신 특성을 평가하였다.[21]
한편, 가속도 센서는 센서 자체의 출력특성이 쌍극자 형태를 이루고 저주파 측정이 가능하여 선배열 센서에 적용하기에 적합한 센서이다. 그러나 수중 표적을 조기에 탐지하기에는 수중음향신호에 대한 감도가 매우 낮아 결과적으로 시스템의 전기적 자체잡음 특성의 개선이 필요하다. 이를 위해 Wlodkowski et al.은 단결정 진동자를 적용한 굽힘형 가속도 센서를 개발하여 수신감도를 향상시킴으로써 전기적 자체잡음 수준을 약 15 dB 감소시켰으며,[22] Deng은 PMN-PT 단결정 진동자를 적용한 전단형 가속도 센서를 제안하였다.[23]
이와 같이 별도의 신호처리가 필요없이 방향탐지가 가능한 관성형 벡터 하이드로폰을 선배열 센서에 적용하기 위해서는 수신감도가 우수하고, 쌍극자 빔 패턴 출력을 가지는 소형의 가속도 센서 개발이 필수적이다. 일반적으로 전단형 가속도 센서는 압축형 가속도 센서에 비해서 감도가 높고 온도 안정성이 우수하다고 알려져 있다. 그러나 벡터 하이드로폰에 적용되는 이러한 전단형 가속도 센서의 장점을 극대화하기 위해서는 기본 구성품인 전단형 진동자에 대한 엄밀한 해석과 설계가 필요하다. 따라서 본 연구에서는 정방정계 4 mm 결정구조를 가지는 PMN-PT 단결정 재료의 두께 전단형 진동자에 대한 파동 방정식의 해를 유도하고, 외력에 대한 빔 패턴 특성을 도출하였으며, 유한요소해석을 통해 그 타당성을 검증하였다.
II. 두께 전단형 진동자의 빔 패턴특성 해석
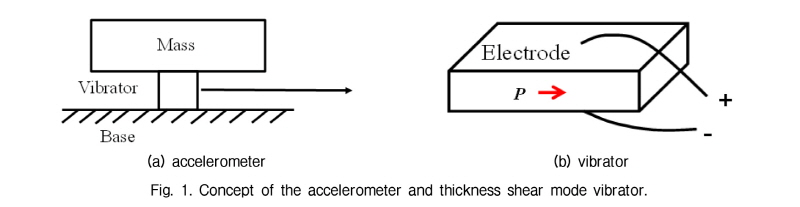
Fig. 1은 가속도 센서 및 두께 전단형 진동자의 개념을 나타내고 있는데, 진동자의 상/하면에 전극이 부착되어 외력에 대해 전기 신호가 출력되며, P는 분극방향을 나타낸다.
두께 전단형 진동자의 파동방정식의 해를 유도하기 위한 해석모델은 Fig. 2와 같으며, 진동자의 상부( )는 외력에 대한 출력 특성을 증폭시켜주기 위한 질량체에 구속되어 있고, 하부(
)는 외력에 대한 출력 특성을 증폭시켜주기 위한 질량체에 구속되어 있고, 하부( )는 베이스에 의해 구속되어 있다.
)는 베이스에 의해 구속되어 있다.
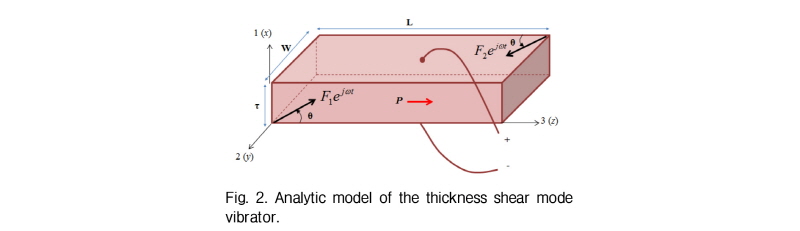
여기서 τ, W, L은 각각 진동자의 세 방향에 대한 치수이고, 진동자의 상/하부에 작용하는 임의 방향의 외력은  와
와  로 표시하였으며, 진동자 상부(
로 표시하였으며, 진동자 상부( ) 및 하부(
) 및 하부( )의 전극 부착과 기구적 구조에 의한 경계조건은 Eqs. (1)과 (2)와 같다.
)의 전극 부착과 기구적 구조에 의한 경계조건은 Eqs. (1)과 (2)와 같다.
 , (1)
, (1)
 , (2)
, (2)
여기서 E, T, S는 각각 전기장, 응력 및 변형률을 나타내며 응력 및 변형률의 아래첨자는 편의상 행렬 표시법[24]을 따랐다. Fig. 2 및 Eqs. (1)과 (2)와 같이 모델링된 두께 전단형 진동자의 파동방정식의 해를 도출하기 위해 필요한 방정식은 아래와 같다.[25]
탄성 운동 방정식,
 , (3)
, (3)
여기서  는 응력 텐서,
는 응력 텐서,  는 변위 텐서이고, 아래첨자 i와 j는 1, 2, 3을 나타낸다. Eq. (2)를 Eq. (3)에 적용한 후 행렬 표시법으로 표시하면 Eqs. (4)와 (5)와 같이 정리된다.
는 변위 텐서이고, 아래첨자 i와 j는 1, 2, 3을 나타낸다. Eq. (2)를 Eq. (3)에 적용한 후 행렬 표시법으로 표시하면 Eqs. (4)와 (5)와 같이 정리된다.
 , (4)
, (4)
 . (5)
. (5)
정전기 전하 방정식,
 , (6)
, (6)
여기서  는 전기 변위장이고 Eqs. (1)과 (6)에 의해 아래와 같이 정리되는데, 진동자 내에서
는 전기 변위장이고 Eqs. (1)과 (6)에 의해 아래와 같이 정리되는데, 진동자 내에서  로 일정하다.
로 일정하다.
 . (7)
. (7)
변형률-변위 관계식,
 , (8)
, (8)
여기서  는 변형률 텐서이고, 각 성분을 정리한 후 행렬 표시법으로 표시하면 Eq. (9)와 같다.
는 변형률 텐서이고, 각 성분을 정리한 후 행렬 표시법으로 표시하면 Eq. (9)와 같다.
 (9)
(9)
압전 구조 방정식,
 , (10)
, (10)
 , (11)
, (11)
여기서  는 일정한 전기장 하에서 측정된 탄성계수,
는 일정한 전기장 하에서 측정된 탄성계수,  는 압전상수 그리고
는 압전상수 그리고  은 일정한 변형량 하에서 측정된 유전계수를 각각 나타낸다. 그리고 아래첨자 I와 J는 1, 2, 3, 4, 5, 6을 나타내고, m과 n은 1, 2, 3을 나타낸다. 한편, 본 연구에서 해석하고자 하는 진동자는 정방정계 4 mm 구조의 결정구조를 가지므로 Eq. (12)와 같은 물성 행렬을 가진다.
은 일정한 변형량 하에서 측정된 유전계수를 각각 나타낸다. 그리고 아래첨자 I와 J는 1, 2, 3, 4, 5, 6을 나타내고, m과 n은 1, 2, 3을 나타낸다. 한편, 본 연구에서 해석하고자 하는 진동자는 정방정계 4 mm 구조의 결정구조를 가지므로 Eq. (12)와 같은 물성 행렬을 가진다.
 . (12)
. (12)
Eqs. (10)과 (11)의 각 성분을 전개하여 Eqs. (1)과 (2) 및 (9)를 적용하고, 물성치를 대입하면 Eqs. (10)과 (11)은 아래와 같이 정리된다.
 , (13)
, (13)
 , (14)
, (14)
 . (15)
. (15)
Eqs. (7), (9), (13) 및 (15)를 Eq. (4)에 적용하고, Eqs. (9)와 (14)를 Eq. (5)에 적용하면 아래와 같이 다시 쓸 수 있다.[25]
 , (16)
, (16)
 . (17)
. (17)
Eqs. (16)과 (17)은 x방향으로 진행하는 2개의 독립적인 전단 파동을 나타내고 있으며, 각각의 일반 해를 Eqs. (18)과 (19)로 두고, 외력에 대한 경계조건을 대입하여 계수 A, B, G, H를 구하면 두께 전단형 진동자의 파동방정식의 해를 구할 수 있다.
 , (18)
, (18)
 , (19)
, (19)
여기서  와
와  은 각각
은 각각  ,
,  이고, ρ는 진동자의 밀도이며, 외력에 대한 경계조건은 아래와 같다.
이고, ρ는 진동자의 밀도이며, 외력에 대한 경계조건은 아래와 같다.

 , (20)
, (20)

 .
.
(21)
Eqs. (20)과 (21)을 Eqs. (18)과 (19)에 대입하여 구해진 계수는 Eqs. (22) ~ (25)와 같고, 이를 Eqs. (18)과 (19)에 대입하면 정방정계 4 mm 결정 구조를 갖는 두께 전단형 진동자의 파동방정식의 해가 되며, 최종적으로 외력에 대한 출력 전압은 Eq. (15)로부터 Eq. (26)과 같이 유도된다.

(22)

(23)
 , (24)
, (24)
 , (25)
, (25)
Eq. (26)을 이용하여 가로(L), 세로(W), 두께(τ)가 각각 8 mm, 6 mm, 0.5 mm인 PMN-28 % PT 단결정[26] 진동자에 대한 빔패턴 특성을 해석하였다. 1 kHz에서의 x축을 기준으로 한 빔 패턴 특성은 Fig. 3과 같이 쌍극자 빔패턴 특성을 나타내고 있으며, 최대 출력 각도가 0°, 180°로서 Deng이 압전 상수의 비로 최대 출력 각도를 도출한 것과 일치하는 결과를 보이고 있다.[23]
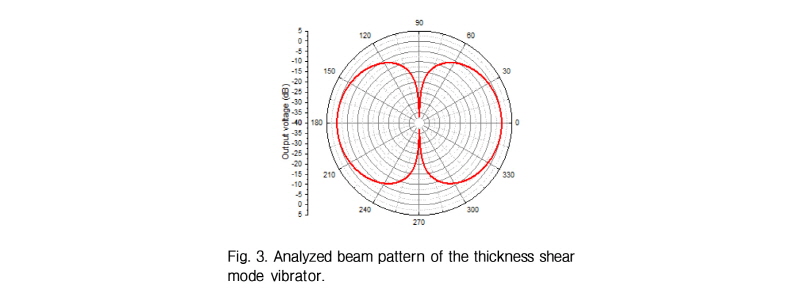
이와 같이 본 연구에서 도출한 수식을 활용하여 결정의 최대 출력 방향을 확인한 후 결정의 절단 각도를 결정한다면, 결과적으로 가속도 센서의 성능을 향상시킬 수 있을 것이다.
III. 해석 결과 검증
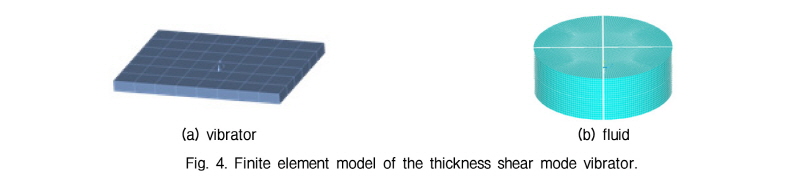
앞 절에서 유도한 수식으로 두께 전단형 진동자의 빔 패턴을 해석한 결과의 타당성을 검증하기 위해, 해석에 사용된 진동자와 동일한 크기의 PMN-28 % PT 단결정 진동자에 대한 유한요소해석을 수행하였다. 해석에 사용된 물성은 Eq. (27)과 같다.[26] ANSYS를 이용한 단결정 진동자의 유한요소 모델은 Fig. 4와 같으며, 총 17,400여 개의 요소로 구성되어있다. 세라믹과 유체의 경계면은 유체-구조 연성층을 적용하였고, 매질의 최외곽에서는 반사가 일어나지 않도록 무반사 경계조건을 설정하였다.

 . (27)
. (27)
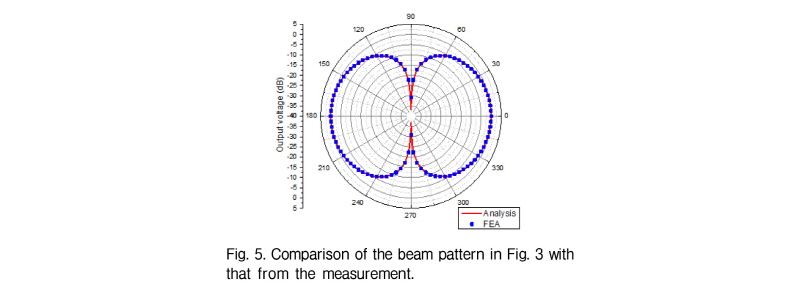
Fig. 5는 앞 절에서 유도한 정방정계 4 mm 결정 구조의 두께 전단형 진동자의 출력 전압 수식을 활용한 빔 패턴 계산 결과와 유한요소 해석 결과를 비교한 것으로, 각도별 최대 오차가 0.48 dB로 두 결과가 잘 일치함을 알 수 있다.
IV. 결 론
본 연구에서는 표적신호의 크기와 방향을 동시에 탐지할 수 있는 관성형 벡터 하이드로폰에 적용 가능한 두께 전단형 진동자의 빔 패턴 특성을 해석하였다. 운동 방정식, 변형률-변위 관계식, 압전 구조방정식 및 경계조건을 활용하여 정방정계 4 mm 결정 구조의 두께 전단형 진동자의 파동방정식의 해를 도출하고, 외력에 대한 출력 전압 식을 유도하였다. 유도된 수식과 해석결과의 타당성은 PMN-28 % PT 단결정 진동자의 외력 방향에 따른 출력 전압 특성의 유한요소 해석을 통해 검증하였다.
본 연구에서 유도된 수식은 두께 전단형 가속도 센서의 설계에 활용되어 궁극적으로 표적의 크기와 방향을 동시에 탐지할 수 있는 벡터 하이드로폰 개발에 기여할 것이다.
