

I. 서 론
II. HDC 소나 시스템
2.1 PAS 시스템과 HDCS 시스템
2.2 HDCS 시스템에서의 송신직접파 간섭 문제
III. 제안하는 기법
3.1 적응형 필터
3.2 적응형 필터를 이용한 송신 직접파 제거 기법 제안
IV. 성능평가
4.1 시뮬레이션
4.2 해상실험
V. 결 론
I. 서 론
소나시스템은 수중의 음향신호를 사용하여 수중 표적을 탐지, 식별하고 표적의 위치를 찾아낸다. 소나 시스템은 크게 두 가지로 나뉘어진다. 먼저, 표적으로부터 방사되는 소리를 이용하는 수동 소나가 있고, 수중으로 음파를 송신하고 표적에 반사되어 들어오는 반향음을 이용하는 능동 소나가 있다.
수동 소나는 수중에서 사용되는 마이크인 하이드로폰을 사용하여 소리를 흡수하고 해상의 주변 소음을 탐지한다. 멀리 있는 목표물을 탐지 할 수 있다는 장점이 있지만 소음이 없거나 정지해 있는 표적은 탐지할 수 없다는 단점을 가지고 있다.
능동 소나는 수중에서 음파를 송신하고 표적에서 반사된 반향음을 분석하여 표적의 위치를 추정한다. 그러나, 반사된 신호에는 표적의 정보와 무관한 잡음이 포함되어 있을 수 있다. 이러한 문제를 해결하기 위해 잡음을 제거하고 표적 정보를 보존하는 알고리즘이 연구되고 있다.[1]
능동 소나는 Pulse Active Sonar(PAS)와 High Duty Cycle Sonar(HDCS)로 나뉜다. PAS 시스템은 널리 사용되고 있는데 신호를 송신하고 반사된 반향음이 수신될 때지 기다렸다가 다음 신호를 송신하는 방식이다. 이와 달리 HDCS 시스템은 높은 듀티 사이클을 가지는 긴 송신 신호를 지속적으로 송신한다. 신호를 수신하면서 계속 펄스를 송신하기 때문에 필연적으로 송신 직접파의 간섭이 생길 수밖에 없다. 따라서 HDCS 시스템에서 송신 직접파의 영향을 억제하여 표적의 탐지 성능을 높이는 연구가 반드시 필요하다.
본 논문에서는 송신 직접파의 영향을 억제하기 위한 기법으로 적응형 필터 기법을 사용하였다. 방위 영역을 사용하는 기존의 방법과 달리 적응형 필터는 시간 영역에서 송신 직접파를 제거한다. 적응형 필터의 기법으로는 Normalized Least Mean Square(NLMS) 및 Recursive Least Square(RLS) 기법을 사용한다. 그리고 알고리즘의 성능을 시뮬레이션과 해상실험에서 평가하였다.
본 연구에서 제시한 적응형 필터 기법을 이용한 송신 직접파 제거 연구가 양상태 고반복률 소나 시스템을 실제로 운용하는데 활용될 수 있을 것으로 기대한다.
II. HDC 소나 시스템
2.1 PAS 시스템과 HDCS 시스템
기존의 대부분의 능동 소나 시스템은 단상태 환경에서 운용되었다. 그러나 최근에 동일한 플랫폼에서 송신기와 수신기가 별도로 동작하는 준양상태환경이나 송신기와 수신기가 완전히 분리된 양상태환경에서 운용하는 것으로 연구의 패러다임이 변화하고 있다.[2] 양상태 환경에서의 동작은 단상태 환경에서 보다 탐지 영역이 더 넓고, 신호를 송신하면서 수신이 불가능 했던 탐지 불가 영역에서의 문제가 발생하지 않는 다는 장점이 있다. 이러한 장점을 극대화하기 위해 최근에는 양상태 환경에서 HDC 소나 시스템을 이용하여 표적을 탐지하고 추적하는 연구가 활발히 진행되고 있다.[3]
기존 능동 소나 시스템은 표적의 탐지, 위치 추정 및 추적을 위해 PAS를 사용하였다. PAS 시스템에서는 듀티 사이클이 낮은 짧은 펄스를 송신하고 최대 탐지거리를 고려하여 수신 대기시간 간격으로 다음 펄스를 전송하는 것이 일반적이다. 즉, 표적에 의한 반향음은 Pulse Repetition Interval(PRI) 내에서 한 번만 발생하며, 다음 표적 반향음을 얻기 위해서는 완전한 주기를 기다려야 한다. 이러한 대기시간으로 인해 PAS 시스템은 Target Revisit Rate(TRR)이 낮아 이동하는 표적의 추적 성능이 저하된다.[4,5]
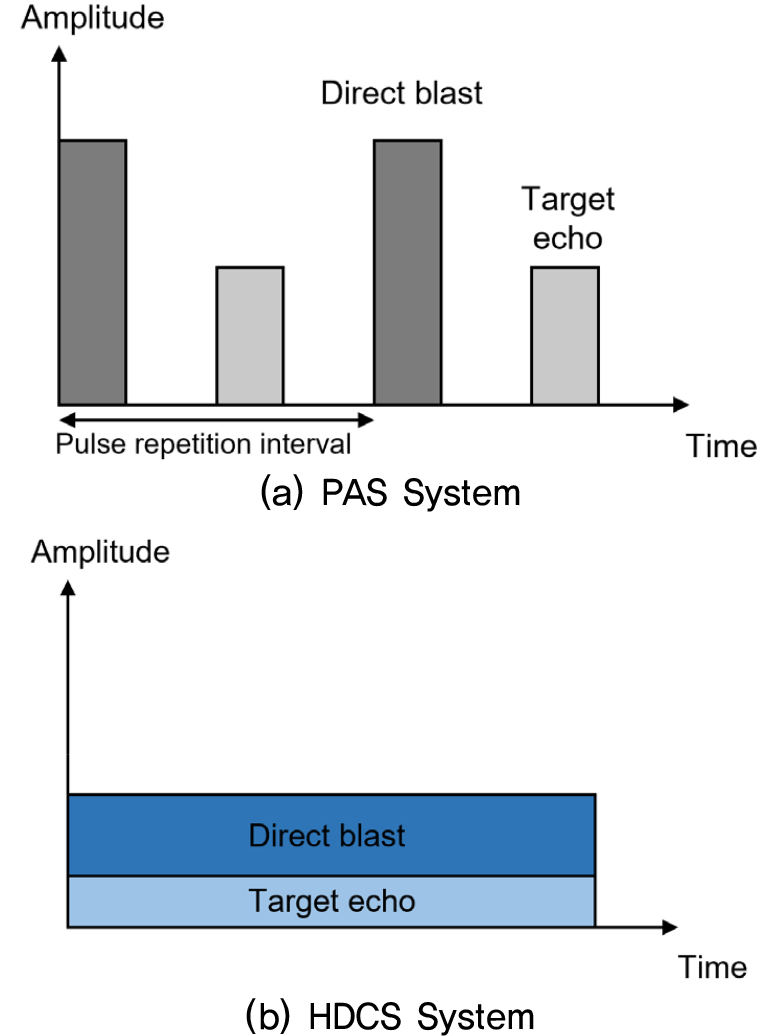
Fig. 1에 PAS 시스템과 HDCS 시스템을 비교하였다. HDCS 시스템은 PAS 시스템과 달리 높은 듀티 사이클로 긴 송신 신호를 지속적으로 송신한다. 따라서 표적에 의한 반향음이 지속적으로 발생하고 높은 TRR을 갖는다. HDCS 시스템은 높은 TRR을 기반으로 이동하는 표적의 추적 성능을 향상시키는 장점이 있다. 그러나 송신과정과 수신과정이 명확하게 구분되지 않기 때문에 수신 신호 분석에서 거리 추정의 모호성이 발생할 수 있다. 또한, 긴 송신 신호를 사용하기 때문에 정합필터 처리 과정에서 긴 Coherent Processing Interval(CPI) 동안 수신 신호의 채널 특성으로 인해 일관성이 유지되지 않고 탐지 성능이 저하된다. 송신 직접파가 지속적으로 수신되기 때문에 상대적으로 약한 표적 신호가 마스킹되어 표적의 탐지가 불가능해질 수 있다는 단점도 있다. HDCS 시스템을 이용한 수중 표적 탐지 방법은 표적 획득률을 획기적으로 향상시킬 수 있지만 실제 운용에서는 해결해야 할 문제점이 많다.
2.2 HDCS 시스템에서의 송신직접파 간섭 문제
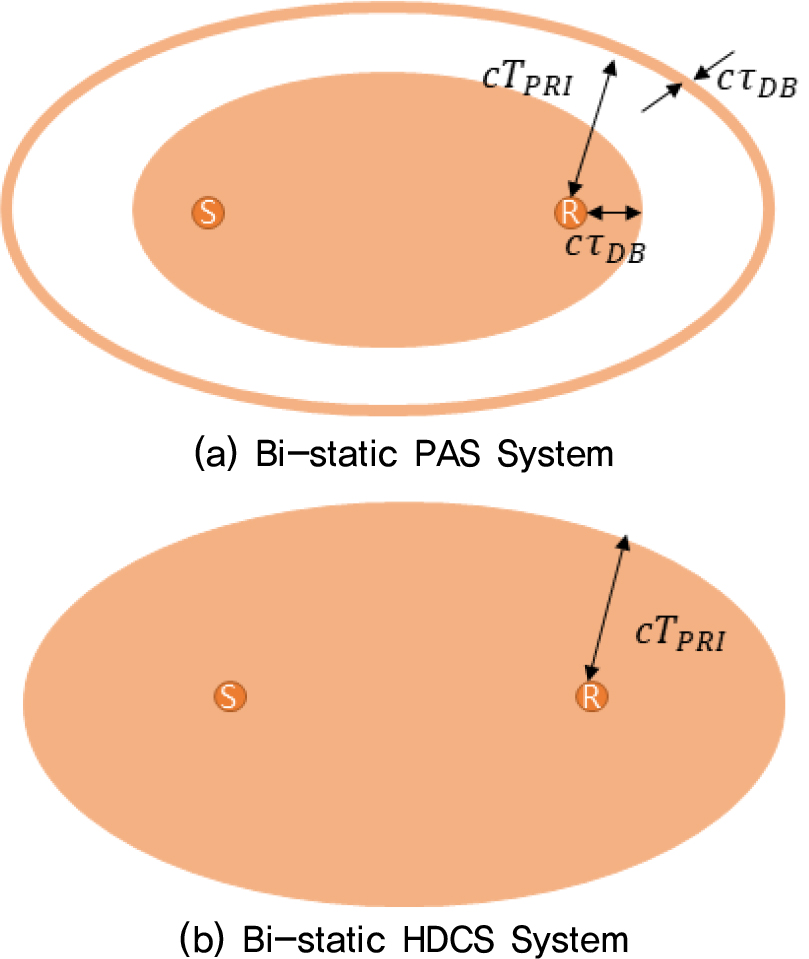
양상태 소나 시스템에서 송신 직접파의 간섭 문제는 표적 탐지 성능을 저하시키는 주요 요인이다. Fig. 2에 양상태 환경에서의 PAS 시스템과 HDCS 시스템을 비교한 그림을 나타내었다. 그림에서, 색깔이 표시되어 있는 부분이 탐지 불가 영역이고 은 신호의 PRI 주기이다. 은 송신 직접파의 유효 마스킹 시간을 의미한다. Fig. 2(a)에 그림에 나타나 있듯이 PAS 시스템에서는 동안 한 번의 송신만 있기 때문에 동안을 제외하고는 탐지가 가능하다. 그러나 HDCS 시스템에서는 신호를 지속적으로 송신하기 때문에 듀티 사이클이 높으면 높을수록 의 길이가 길어져 탐지가 가능한 영역이 줄어든다. 따라서 송신 직접파의 간섭을 억제할 수 있는 수신 신호 처리 기술의 개발이 필수적이다.
III. 제안하는 기법
3.1 적응형 필터
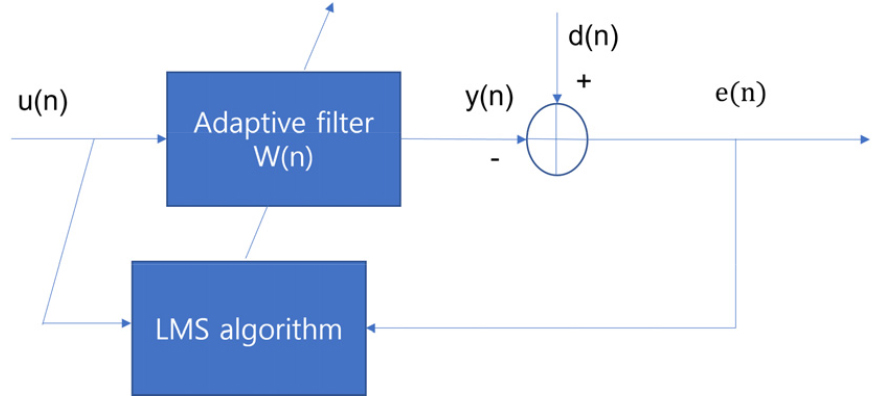
적응형 필터 기법은 피드백을 통하여 필터 가중치를 변화시켜 신호를 최적화하는 기법이다.[6] 본 논문에서는 NLMS 기법을 사용하였다. NLMS 기법을 설명하기 위해서는 Least Mean Square(LMS) 알고리즘에 대한 설명이 선행되어야 한다. Fig. 3에 LMS 알고리즘의 블록도를 나타내었다. 입력 벡터 이 필터를 통해 으로 출력되고 과 의 차인 이 출력된다. 알고리즘은 의 값을 최소화하며 필터 가중치를 업데이트한다. 각각의 벡터들은 다음의 식과 같이 나타난다.
은 시간의 함수로 표현된 적응형 필터의 계수 벡터이며 𝜇는 알고리즘의 수렴 속도를 제어하는 적응 상수다. 적응 상수 𝜇의 크기가 커지면 알고리즘의 수렴 속도는 빨라지지만 최소 제곱 오차도 커진다. 반대로 𝜇의 크기가 작아지면 알고리즘의 수렴 속도는 느려지지만 최소 제곱 오차가 작아진다. 따라서 적정한 크기의 𝜇값을 고려하는 것이 알고리즘 사용에 중요한 부분이다.
본 논문에서는 NLMS 알고리즘을 사용하였다. NLMS 알고리즘은 입력 신호의 크기에 영향을 받는 LMS 알고리즘을 입력 신호의 크기로 정규화하여 얻어진 알고리즘이다. 아래의 식으로 나타내어진다.
Eq. (3)의 LMS 식에서 입력 신호의 크기로 나누어 준다는 차이점이 있다. 하지만 입력 신호의 크기가 작아져 분모가 0에 가까워지면 시스템의 필터 가중치가 발산할 위험이 있다. 따라서 아래의 식과 같이 정규화 상수를 입력 신호의 크기에 더해줌으로써 시스템의 안정성을 높인다.
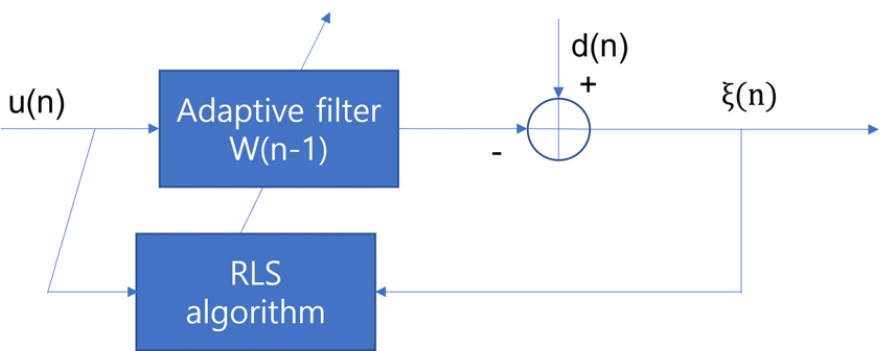
RLS 알고리즘은 최소 제곱 비용 함수를 재귀적으로 최소화하는 필터 계수를 찾는 알고리즘이다. 이러한 접근 방식은 평균 제곱 오차를 제거하는데 초점을 둔 LMS 알고리즘과 다르다. RLS 알고리즘은 LMS 기반 알고리즘보다 수렴 속도가 빠르지만 연산량이 많다는 단점을 가지고 있다. Fig. 4에 RLS 알고리즘의 블록도를 나타내었다. 입력 벡터 이 필터를 통해 으로 출력되고 과 의 차인 이 출력된다. 알고리즘은 의 값을 최소화하며 필터 가중치를 업데이트한다. 각각의 벡터들은 다음의 식과 같이 나타난다.
RLS 알고리즘은 아래의 비용 함수를 최소화 하는 것을 목표로 동작한다.
알고리즘의 초기값은 아래와 같이 설정된다.
Eq. (8)의 식에서 𝛿는 정규화 상수인데 입력 신호의 정보가 부족하거나 잡음 신호로 인해 출력 신호의 사상이 정확하지 않은 것을 보정해주는 상수이다. 아래의 식은 선험적 오류를 나타낸다. Eq. (9)에서 이전 시간대에서 생성된 추정치를 대체한다. 그 이후에 필터 가중치는 아래의 Eq. (9)와 같이 갱신된다.
아래의 Eq. (10)은 역행렬 보조정리에 의해 나타난다.
𝜆는 망각 인자인데 그 크기에 따라 이전 시간의 정보가 현재 시간에 얼마나 반영되는지를 결정하는 상수이다. 아래의 식은 필터 가중치를 업데이트 하는 식이다. 과 은 Eq. (12)와 같은 관계를 가지고 있다.
3.2 적응형 필터를 이용한 송신 직접파 제거 기법 제안
이전에 적응형 필터를 이용하여 송신 직접파를 제거하는 연구가 있었다.[7] LMS, BLMS, LS를 이용하여 LFM 펄스에 대해 송신 직접파를 제거하였는데 본 논문에서는 LFM 뿐만 아니라 GSFM 그리고 NLMS와 RLS 알고리즘을 적용하여 송신 직접파를 제거하였다. 적응형 필터의 본래 목적은 입력 신호와 원하는 신호 사이의 오류를 최소화하고 입력 신호가 원하는 신호를 따르도록 하는 것이다. 그러나 본 논문에서는 송신 직접파를 제거하여 표적 탐지 성능을 향상시키는 것이므로 입력 신호에 표적 방위의 빔 신호를 입력하고, 원하는 신호에는 송신 직접파 방위의 빔 신호를 입력한다. 그런 다음 알고리즘에서 표적 방위에 대한 빔 신호에 있는 송신 직접파 성분이 송신 직접파 방위의 빔 신호에 성분과 상쇄됨에 따라 출력 신호에는 표적 신호만 남게 된다. 본 논문에서 사용된 고반복률 소나 시스템의 펄스는 부펄스의 길이가 1 s기 때문에 송신 직접파와 표적 신호의 수신 시간의 차이가 1 s 이상이라면 두 신호는 다른 성분을 가지고 있으므로 직교성이 유지되므로 적응형 필터 기법에 사용하기 적합하다.
IV. 성능평가
4.1 시뮬레이션
적응형 필터를 이용한 송신 직접파 제거 기법의 성능을 평가하기 위해 시뮬레이션을 수행하였다. 시뮬레이션에서 Linear Frequency Modulated Separated Band Pulse Train(LFM SBPT)와 Generalized Sinusoidal Frequency Modulated Overlapping Band Pulse Train (GSFM OBPT) 두 가지 펄스 열 신호를 사용하였다. LFM SBPT 신호는 3 kHz의 중심 주파수와 1 kHz의 시스템 대역폭으로 설계하였다. 펄스열 신호는 18 s의 길이를 가지고 1 s의 길이를 가진 18개의 부펄스가 분리된 대역폭을 가진다. GSFM OBPT 신호는 3 kHz의 중심 주파수와 1 kHz의 시스템 대역폭으로 설계하였다. 펄스열 신호는 1 s의 길이와 800 Hz의 부펄스 대역폭을 갖는 30개의 부펄스를 사용하여 30 s의 길이를 갖는다. 송신 직접파는 60 dB 수준으로 1.3 s, 목표 신호는 20 dB 수준으로 3.7 s에 수신되는 시나리오를 설정했다. 빔 신호를 형성하기 위해 32개의 센서를 15 cm 간격의 선 배열로 구성하였다. 빔형성 기법은 지연 합 빔 형성 기법을 사용하였다. 송신기는 56° 방위, 표적은 11° 방위에서 수신되도록 설정하였다.
모든 시뮬레이션에서 NLMS기법의 필터 길이는 200, 𝜇 = 0.01, 𝛿 = 0.001로 실험을 수행하였다. Fig. 5에 LFM SBPT에 NLMS를 적용한 스펙트로그램 결과를 나타내었다. (a)는 표적 방위의 빔 신호, (b)는 송신 직접파 방위의 빔 신호이다. (c)는 필터가 적용된 후의 표적 방위 빔 신호이다. 결과를 보면 송신 직접파가 제거되고 표적 신호가 살아 남는 것을 확인할 수 있다.
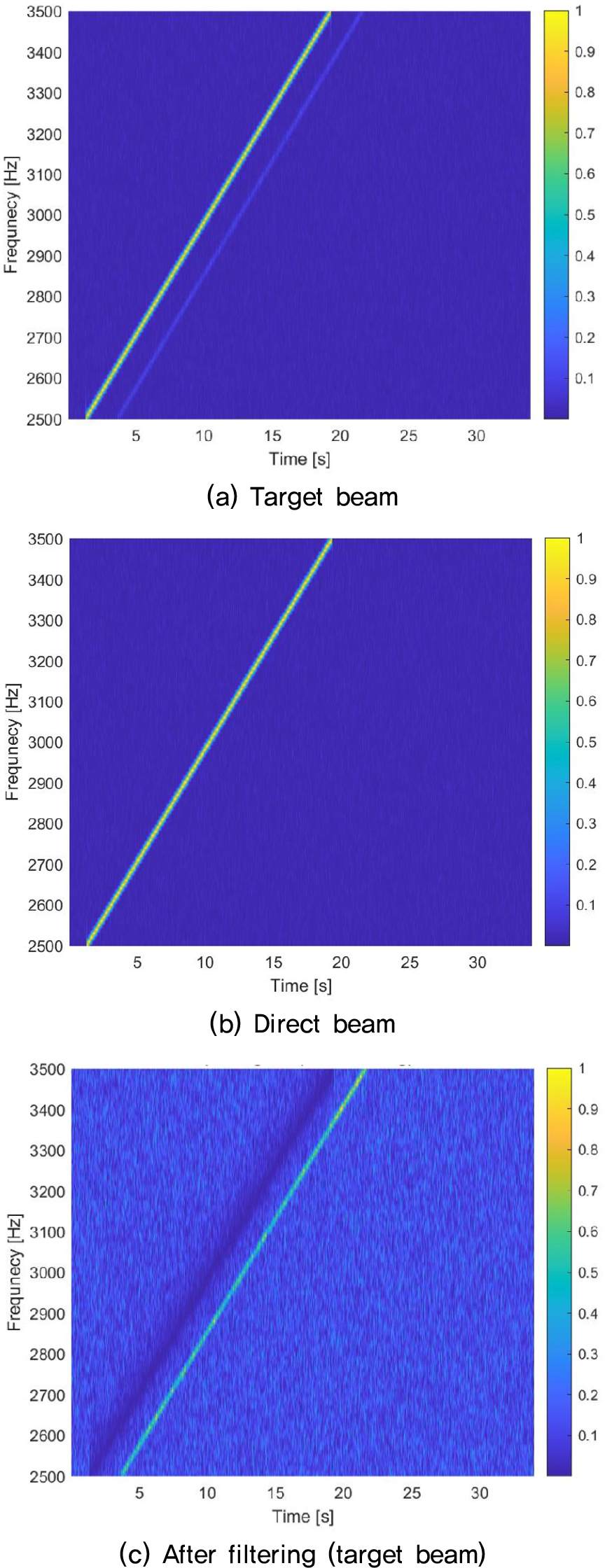
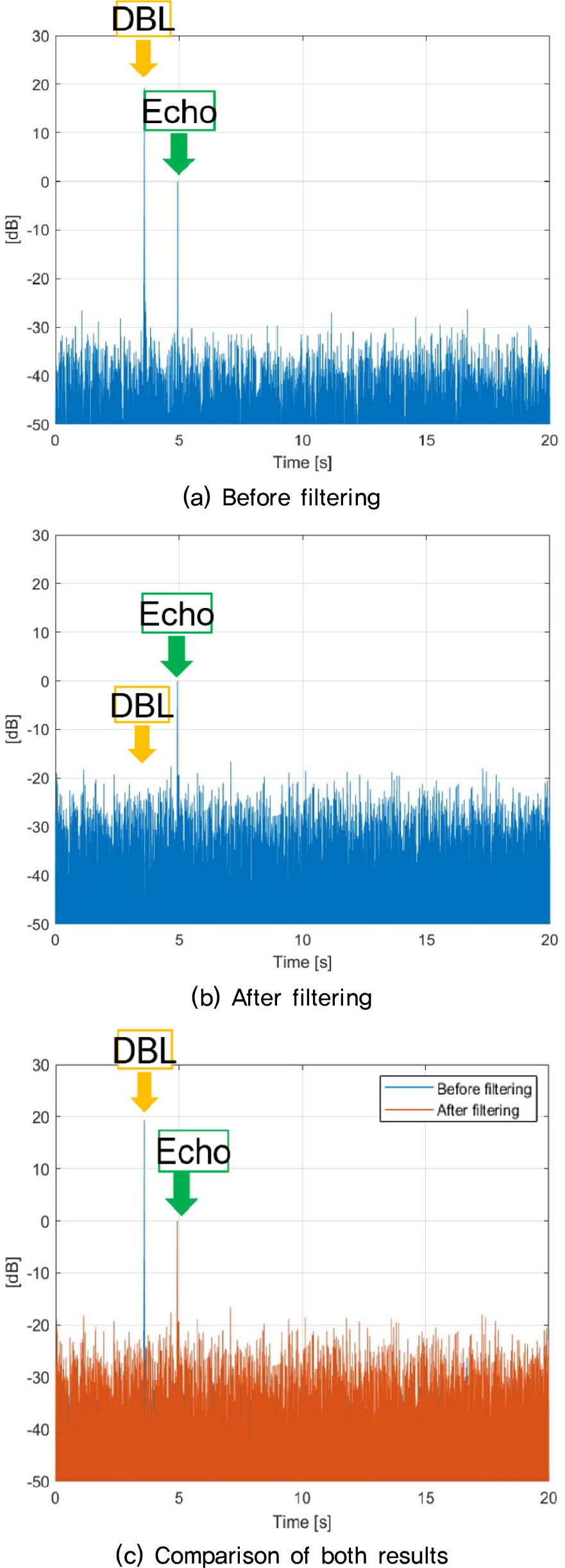
Fig. 6에 LFM SBPT에 NLMS를 적용한 정합 필터 결과를 나타내었다. 정합필터 결과를 도시할 때 표적의 레벨이 0이 되도록 정규화하였다. (a)는 필터링 전, (b)는 필터링 후 그리고 (c)는 두 그림을 겹쳐놓은 것이다. 그림을 보면 송신 직접파의 레벨이 잡음 레벨 이하로 감소한 것을 확인할 수 있다.
모든 시뮬레이션에서 RLS기법의 필터 길이는 64, 𝛿 = 0.1, 𝜆 = 0.999로 실험을 수행하였다. Fig. 7에 LFM SBPT에 RLS를 적용한 스펙트로그램 결과를 나타내었다. (a)는 표적 방위의 빔 신호, (b)는 송신 직접파 방위의 빔 신호이다. (c)는 필터가 적용된 후의 표적 방위 빔 신호이다. 결과를 보면 송신 직접파가 제거되고 표적 신호가 살아 남는것을 확인할 수 있다.
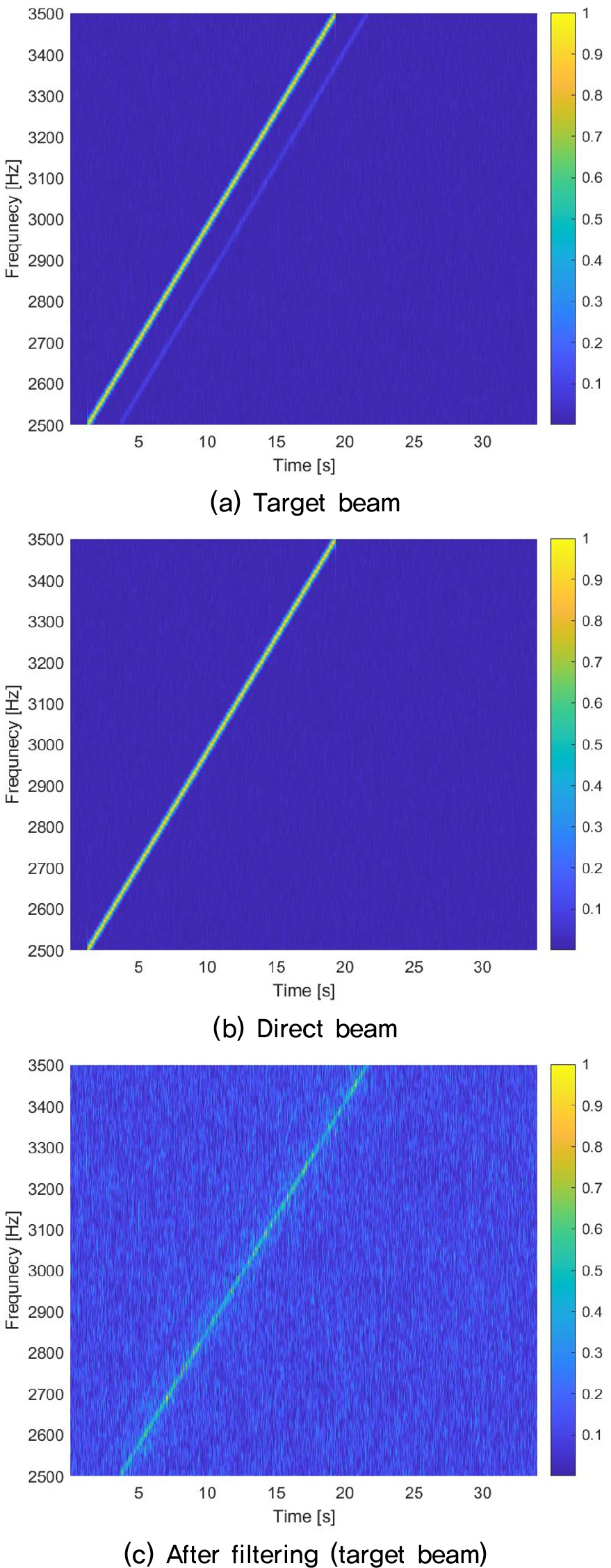
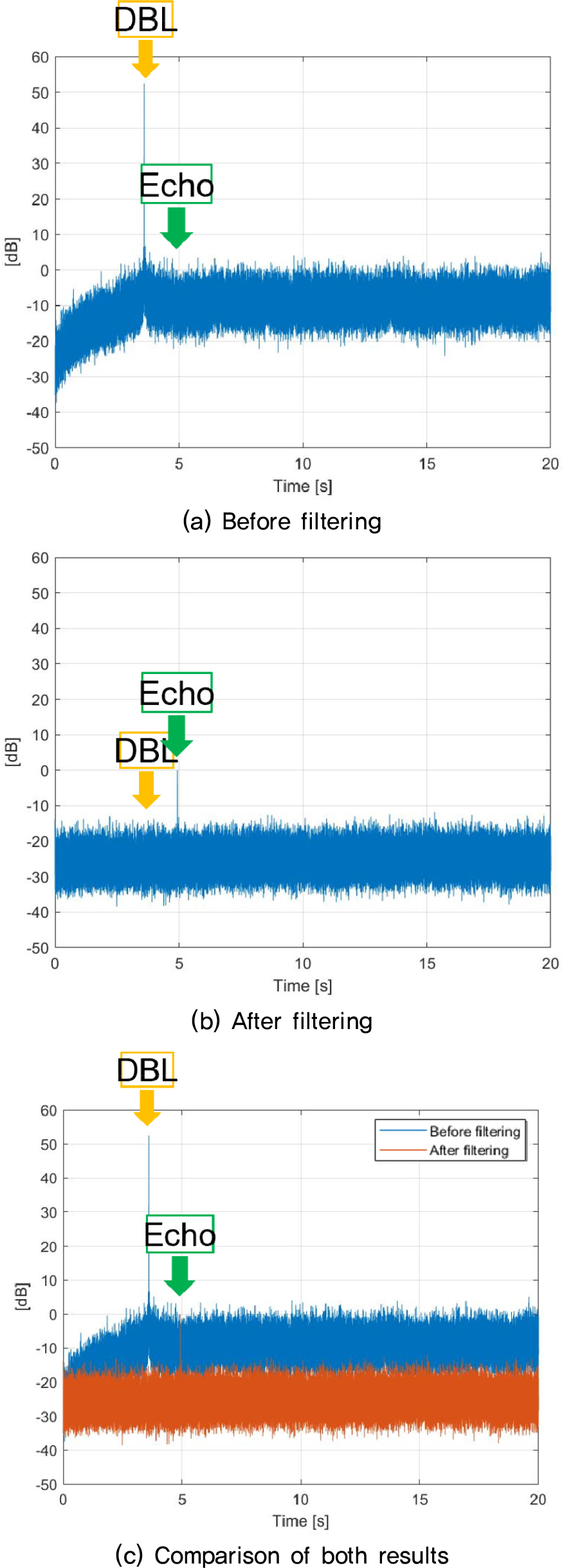
Fig. 8에 LFM SBPT에 RLS를 적용한 정합 필터 결과를 나타내었다. (a)는 필터링 전, (b)는 필터링 후 그리고 (c)는 두 그림을 겹쳐놓은 것이다. 그림을 보면 송신 직접파의 레벨이 잡음 레벨까지 감소한 것을 확인할 수 있다.
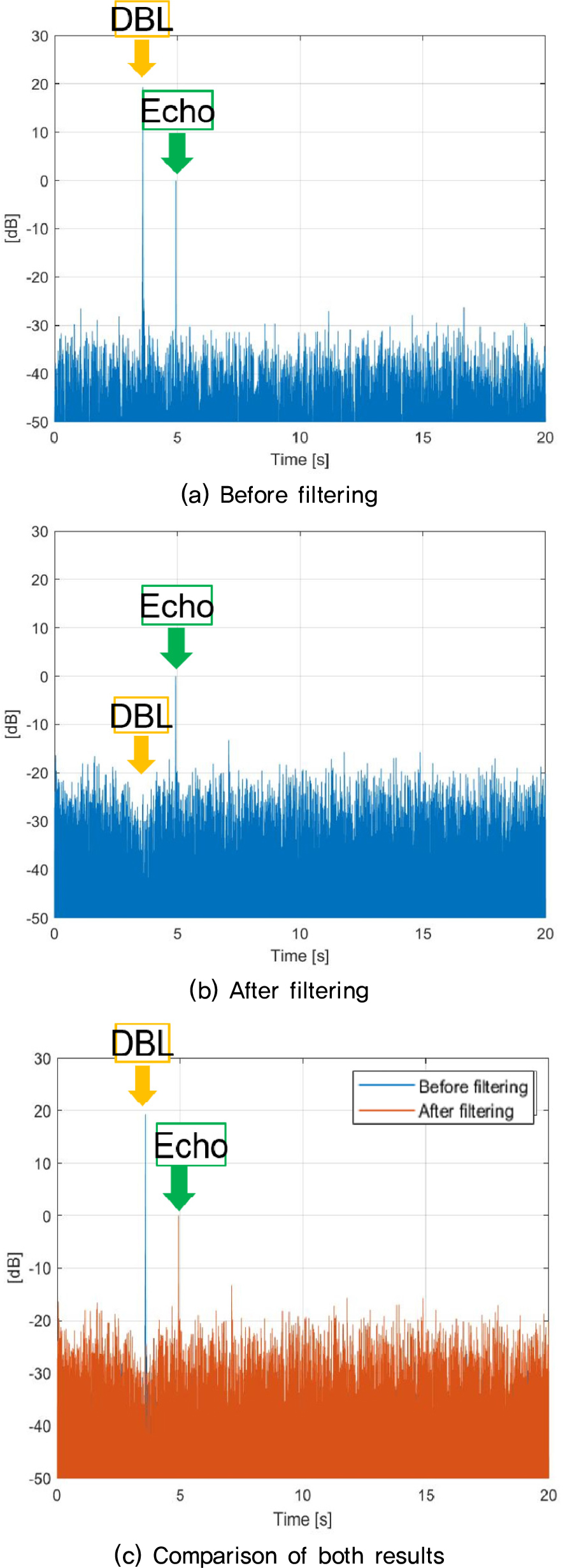
Fig. 9에 GSFM OBPT에 NLMS를 적용한 스펙트로그램 결과를 나타내었다. (a)는 표적 방위의 빔 신호, (b)는 송신 직접파 방위의 빔 신호이다. (c)는 필터가 적용된 후의 표적 방위 빔 신호이다. 결과를 보면 스펙트로그램으로는 성능 평가가 불가능하다.
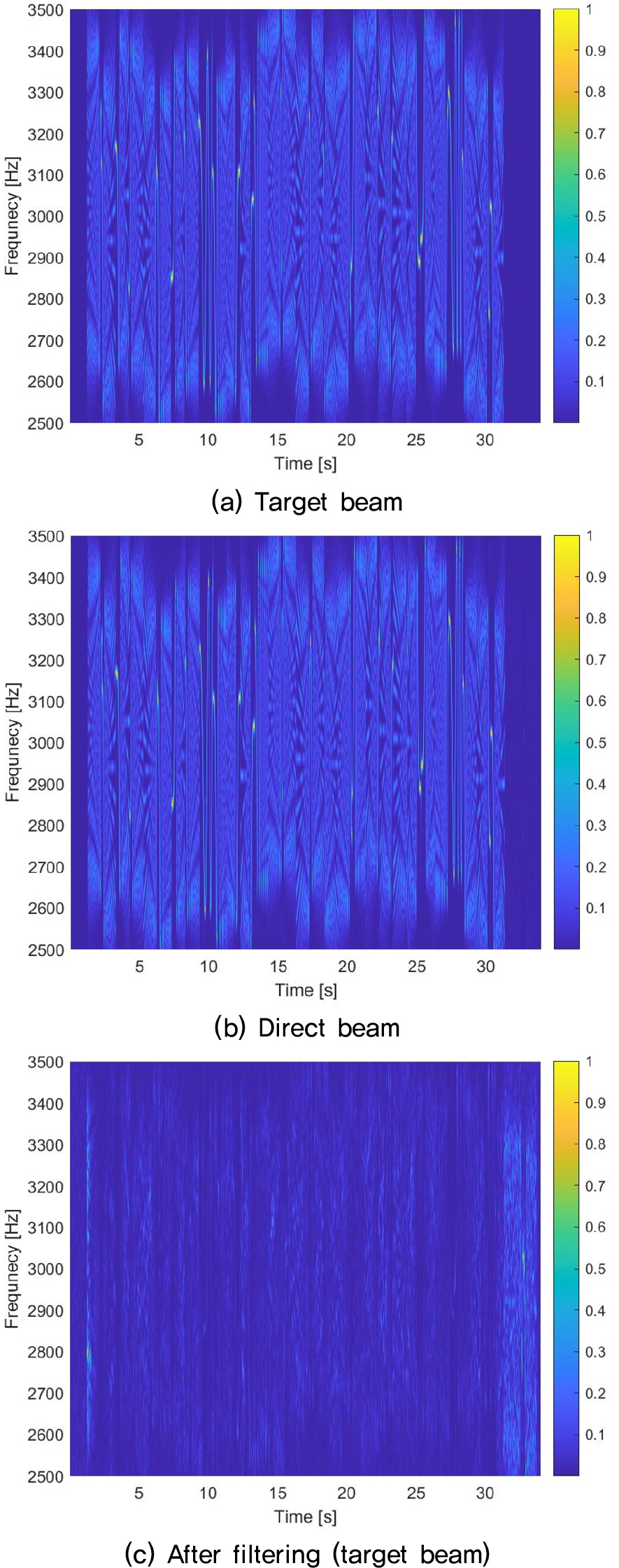
Fig. 10에 GSFM OBPT에 NLMS를 적용한 정합 필터 결과를 나타내었다. (a)는 필터링 전, (b)는 필터링 후 그리고 (c)는 두 그림을 겹쳐놓은 것이다. 그림을 보면 송신 직접파의 레벨이 잡음 레벨까지 감소하였고 표적의 부엽이 약 20 dB 이상 감소하여 탐지 성능이 향상되었다는 것을 알 수 있다.
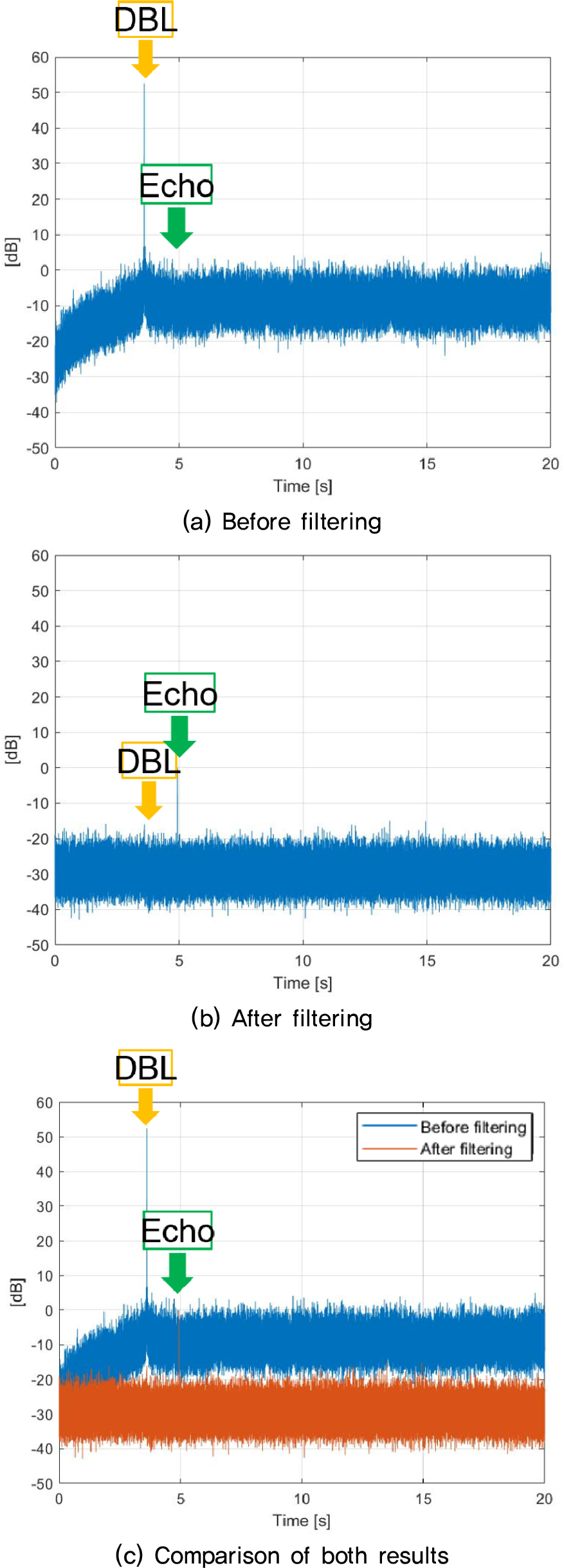
Fig. 11에 GSFM OBPT에 RLS를 적용한 스펙트로그램 결과를 나타내었다. (a)는 표적 방위의 빔 신호, (b)는 송신 직접파 방위의 빔 신호이다. (c)는 필터가 적용된 후의 표적 방위 빔 신호이다. 결과를 보면 NLMS와 마찬가지로 스펙트로그램으로는 성능 평가가 불가능하다.
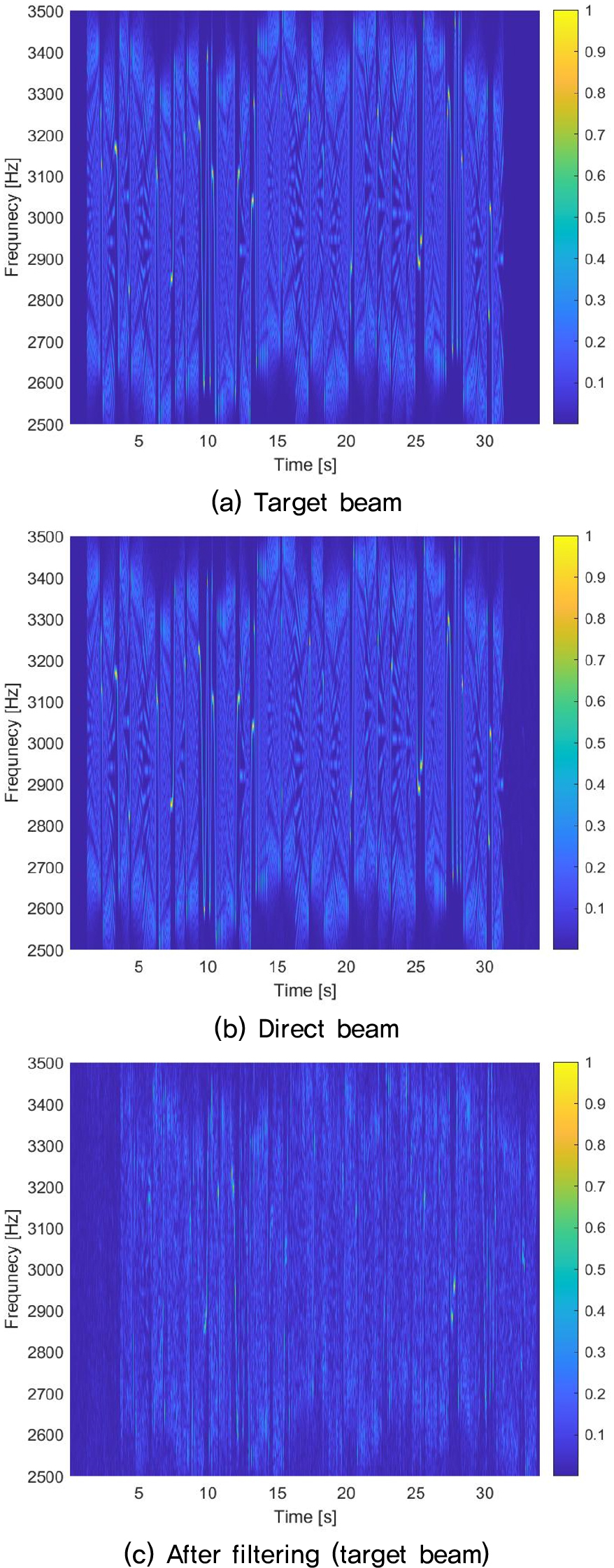
Fig. 12에 GSFM OBPT에 RLS를 적용한 정합 필터 결과를 나타내었다. (a)는 필터링 전, (b)는 필터링 후 그리고 (c)는 두 그림을 겹쳐놓은 것이다. 그림을 보면 송신 직접파의 레벨이 잡음 레벨까지 감소하였고 표적 의 부엽이 약 15 dB 이상 감소하여 탐지 성능이 향상되었다는 것을 알 수 있다.
4.2 해상실험
적응형 필터를 이용한 송신 직접파 제거 기법의 성능을 평가하기 위해 해상 실험 데이터에 적용하였다. 해상 실험 데이터는 LFM SBPT와 GSFM OBPT 두 가지 펄스 열 신호를 사용하였다. LFM SBPT 신호는 3 kHz의 중심 주파수와 1 kHz의 시스템 대역폭으로 설계하였다. 펄스열 신호는 18 s의 길이를 가지고 1 s의 길이를 가진 18개의 부펄스가 분리된 대역폭을 가진다. GSFM OBPT 신호는 3 kHz의 중심 주파수와 1 kHz의 시스템 대역폭으로 설계하였다. 펄스열 신호는 1 s의 길이와 500 Hz의 부펄스 대역폭을 갖는 30개의 부펄스를 사용하여 30 s의 길이를 갖는다. LFM SBPT는 송신 직접파 2.5 s, 표적 신호가 4 s에 수신되고 GSFM OBPT는 송신 직접파 6.8 s, 표적 신호가 9 s에 수신된다.
모든 해상실험에서 NLMS기법의 필터 길이는 200, 𝜇 = 0.01, 𝛿 = 0.001로 설정되었다. Fig. 13에 LFM SBPT에 NLMS를 적용한 빔 파워 결과를 나타내었다. Fig. 13(a)에서 11° 방위에서 4 s에 표적 신호가 수신되고 56° 방위에서 2.5 s에 송신 직접파가 수신된다. 그리고, (b) 그림을 보면 필터링 이후에 11° 방위 표적 신호의 파워가 강해져 표적 신호의 탐지가 개선되었다. 송신기와 표적이 모두 0° ~ 90° 범위내에 있기 때문에 결과를 알아보기 쉽도록 0° ~ 90° 의 빔 파워 결과만 나타내었다.
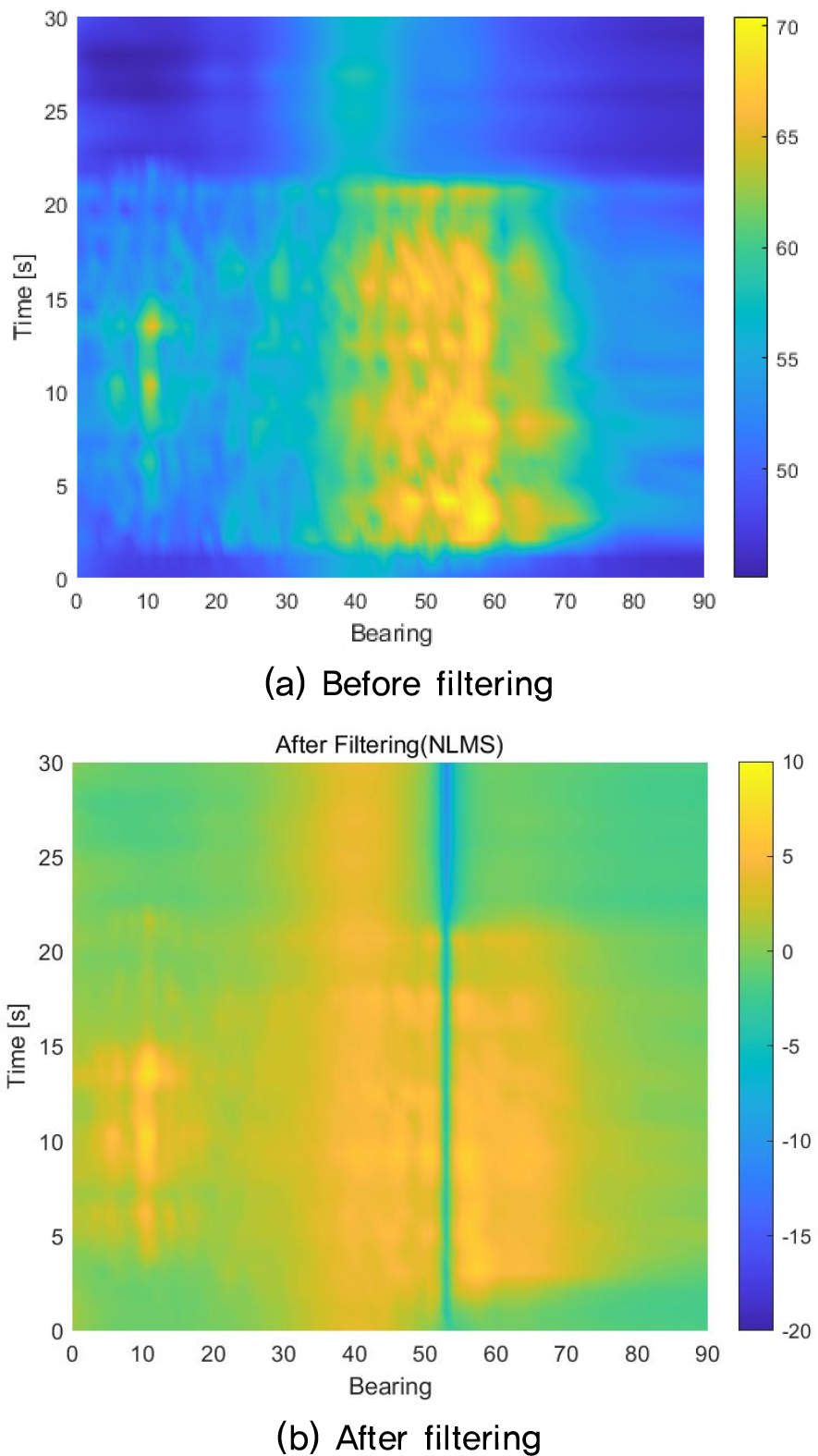
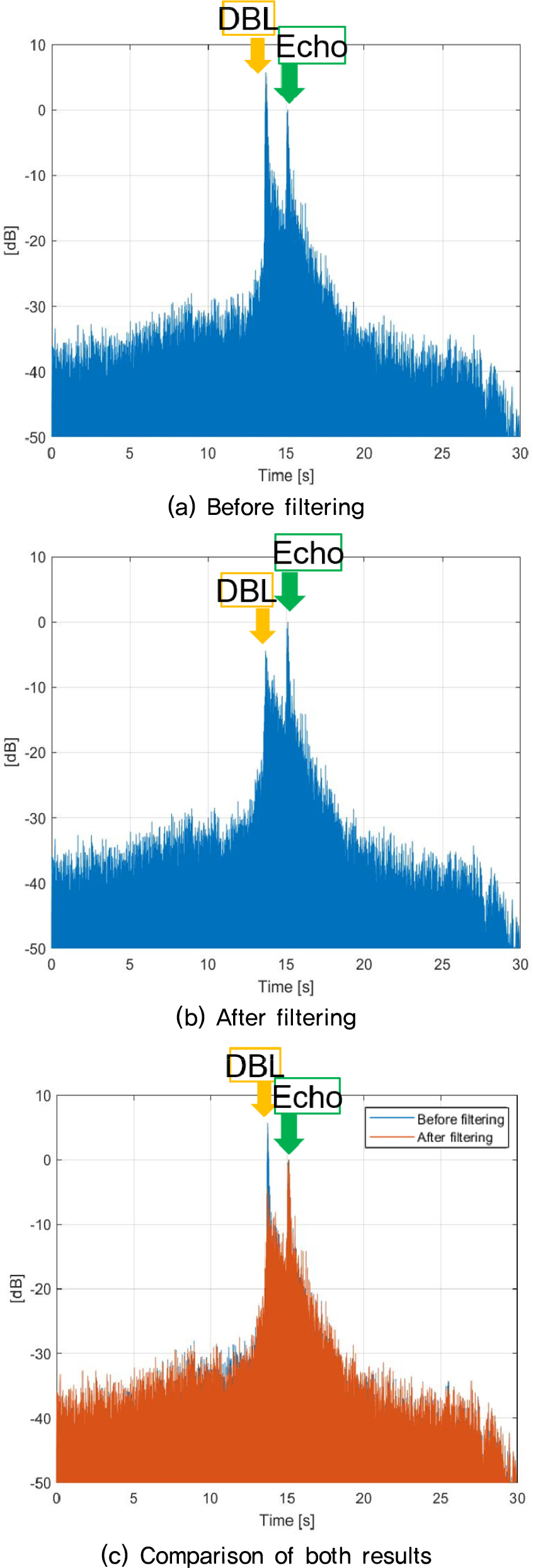
Fig. 14에 LFM SBPT에 NLMS를 적용한 정합 필터 결과를 나타내었다. (a)는 필터링 전, (b)는 필터링 후 그리고 (c)는 두 그림을 겹쳐놓은 것이다. 그림을 보면 송신 직접파의 레벨이 약 5 dB 이상 감소한 것을 확인할 수 있다.
모든 해상실험에서 RLS기법의 필터 길이는 64, 𝛿 = 0.1, 𝜆 = 0.99로 실험을 수행하였다. Fig. 15에 LFM SBPT에 RLS를 적용한 빔 파워 결과를 나타내었다. (a)는 필터링 전, (b)는 필터링 후 빔 신호이다. (b)의 그래프를 도시할 때 표기의 편의성을 위해 –30 dB보다 낮은 값들은 –30 dB로 보정하여 도시하였다. 결과를 보면 11° 방위에서 들어오는 표적 신호의 파워가 강해지고 53° 방위에서 들어오는 송신 직접파의 파워가 약해진 것을 확인할 수 있다.
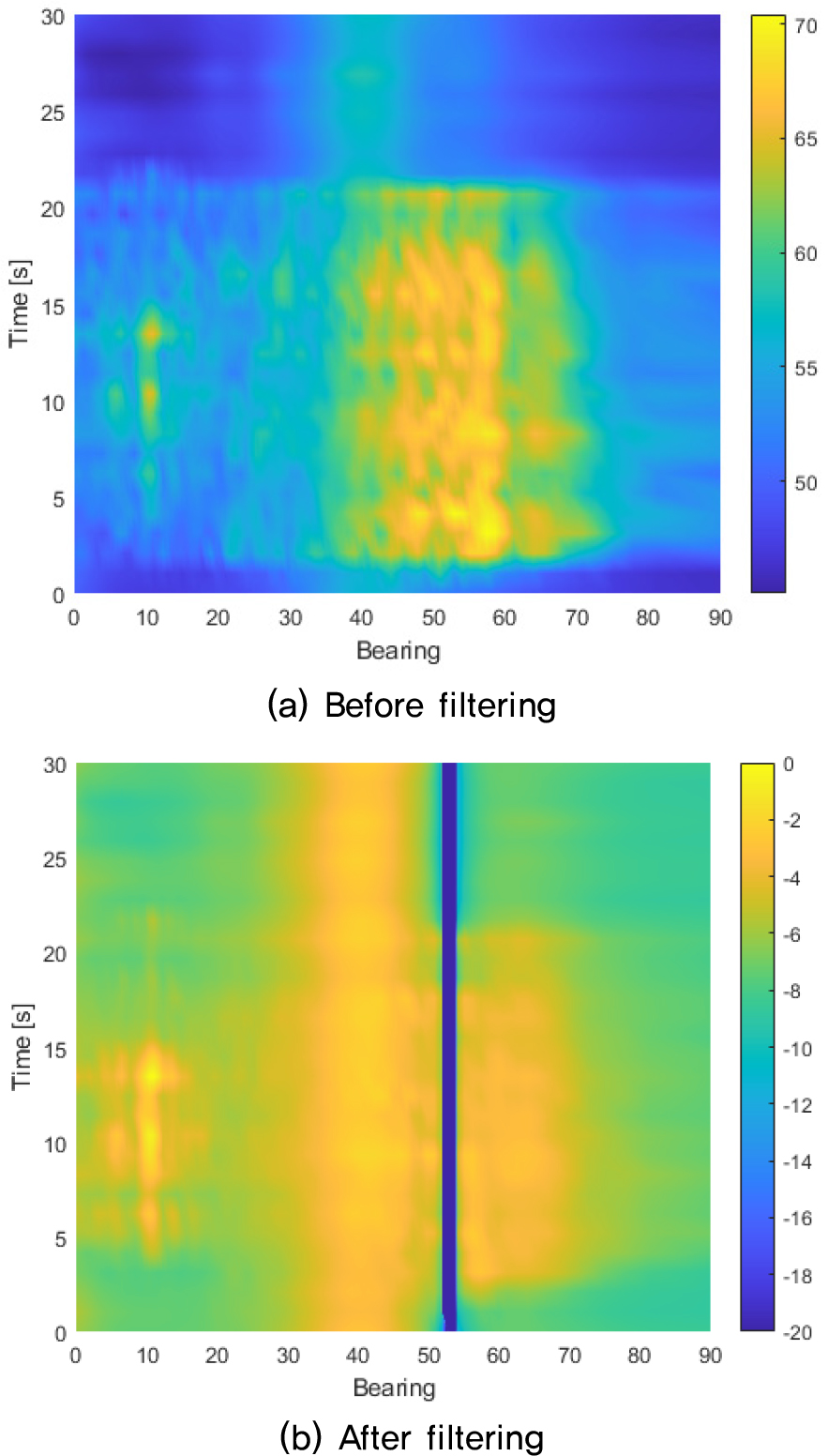
Fig. 16에 LFM SBPT에 RLS를 적용한 정합 필터 결과를 나타내었다. (a)는 필터링 전, (b)는 필터링 후 그리고 (c)는 두 그림을 겹쳐놓은 것이다. 그림을 보면 송신 직접파의 레벨이 약 9 dB 이상 감소한 것을 확인할 수 있다.
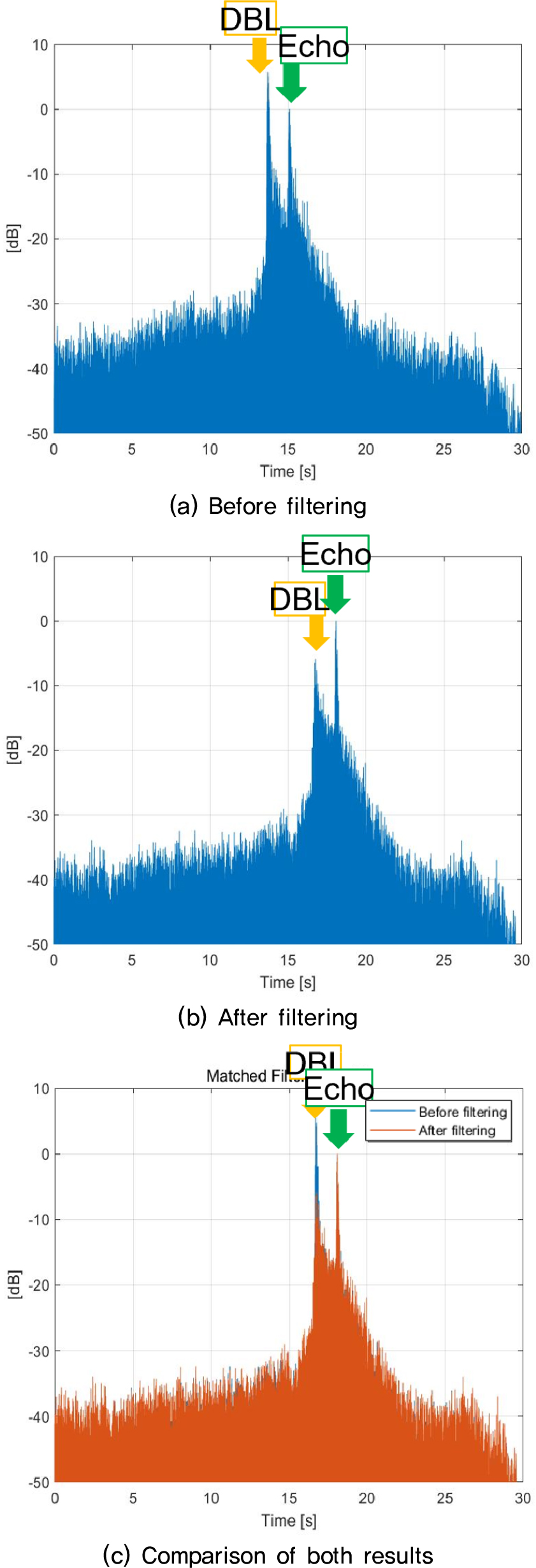
Fig. 17 GSFM OBPT에 NLMS를 적용한 빔 파워 결과를 나타내었다. (a)는 필터링 전, (b)는 필터링 후 빔 신호이다. (b)의 그래프를 도시할 때 표기의 편의성을 위해 –30 dB보다 낮은 값들은 –30 dB로 보정하여 도시하였다. 결과를 보면 53° 방위에서 들어오는 송신 직접파의 파워는 낮아졌지만 11° 방위에서 들어오는 표적의 파워가 증가하지는 않았다. 따라서 정합 필터 결과로 성능을 평가하여야 한다.
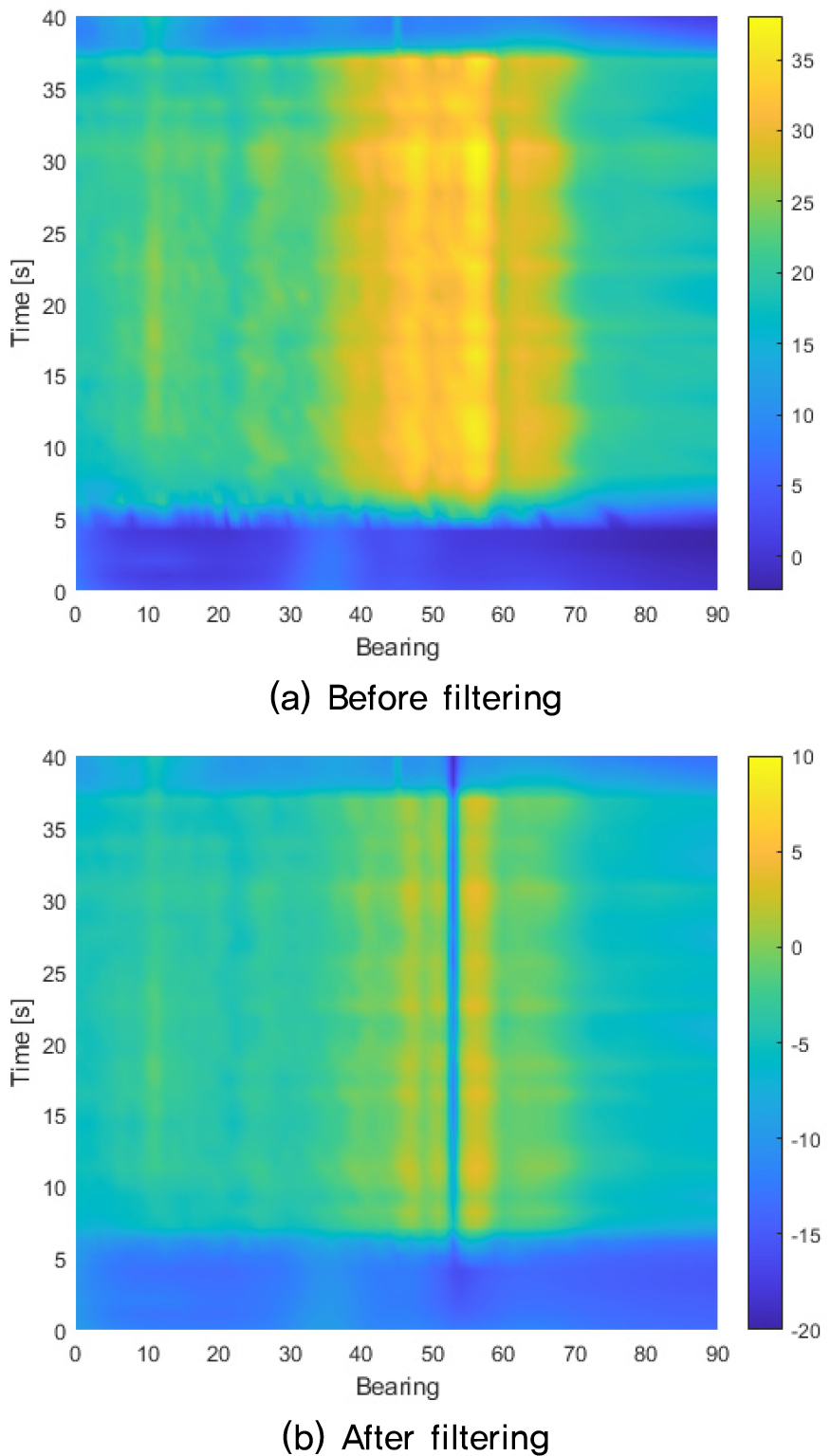
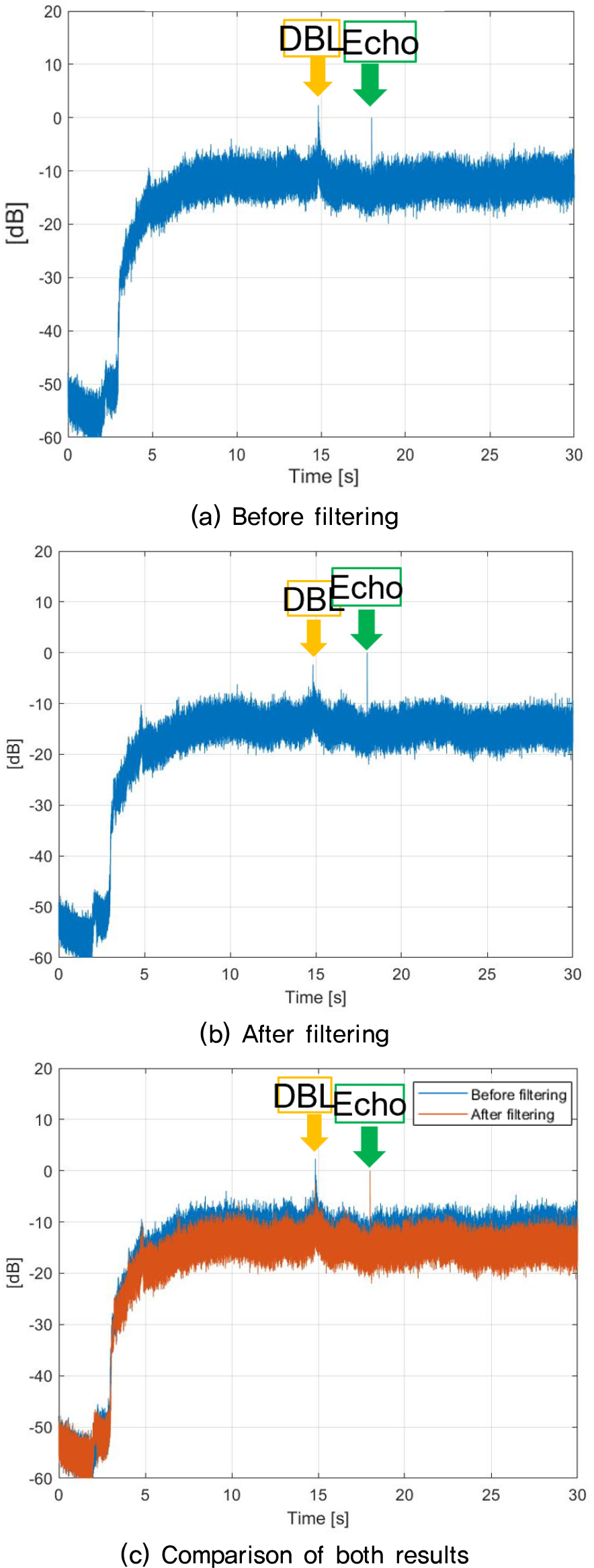
Fig. 18에 GSFM OBPT에 NLMS를 적용한 정합 필터 결과를 나타내었다. (a)는 필터링 전, (b)는 필터링 후 그리고 (c)는 두 그림을 겹쳐놓은 것이다. 그림을 보면 송신 직접파의 레벨이 4 dB 정도 감소하고 표적의 부엽이 약 3 dB 정도 감소하였다.
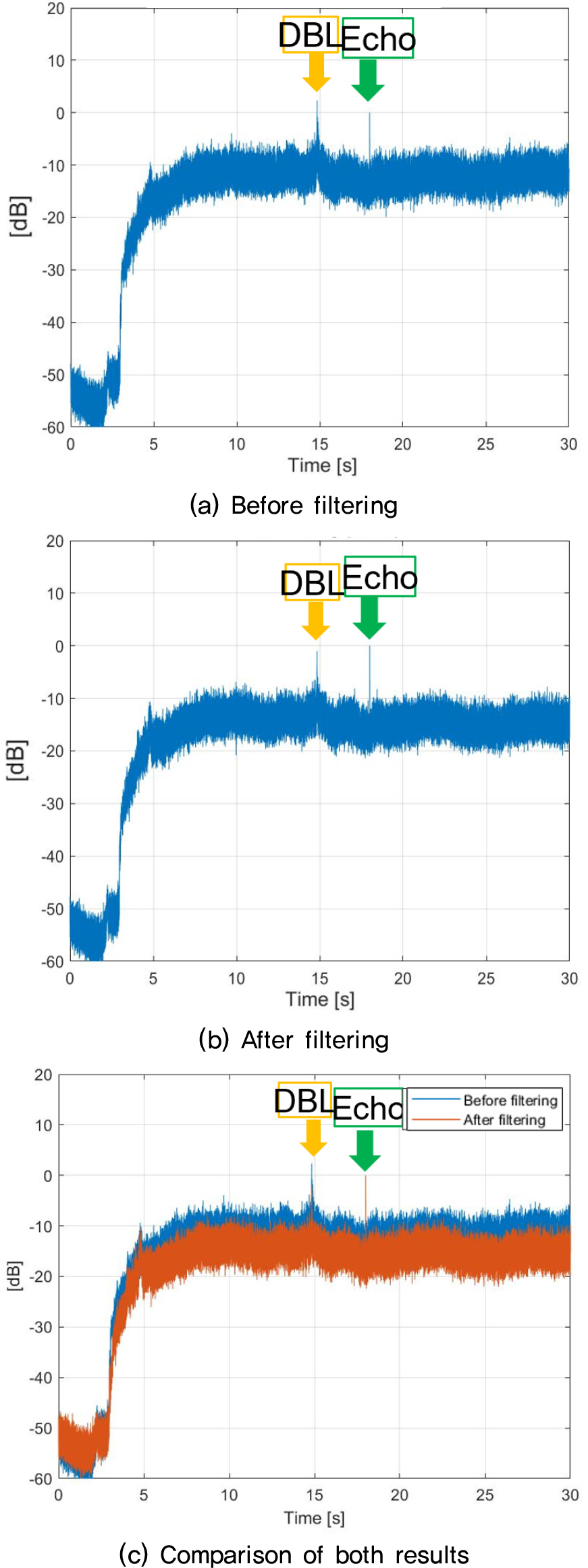
Fig. 19 GSFM OBPT에 RLS를 적용한 빔 파워 결과를 나타내었다. (a)는 필터링 전, (b)는 필터링 후 빔 신호이다. 결과를 보면 NLMS와 마찬가지로 53° 방위에서 들어오는 송신 직접파의 파워는 낮아졌지만 11° 방위에서 들어오는 표적의 파워가 증가하지는 않았다. 따라서 정합 필터 결과로 성능을 평가하여야 한다.
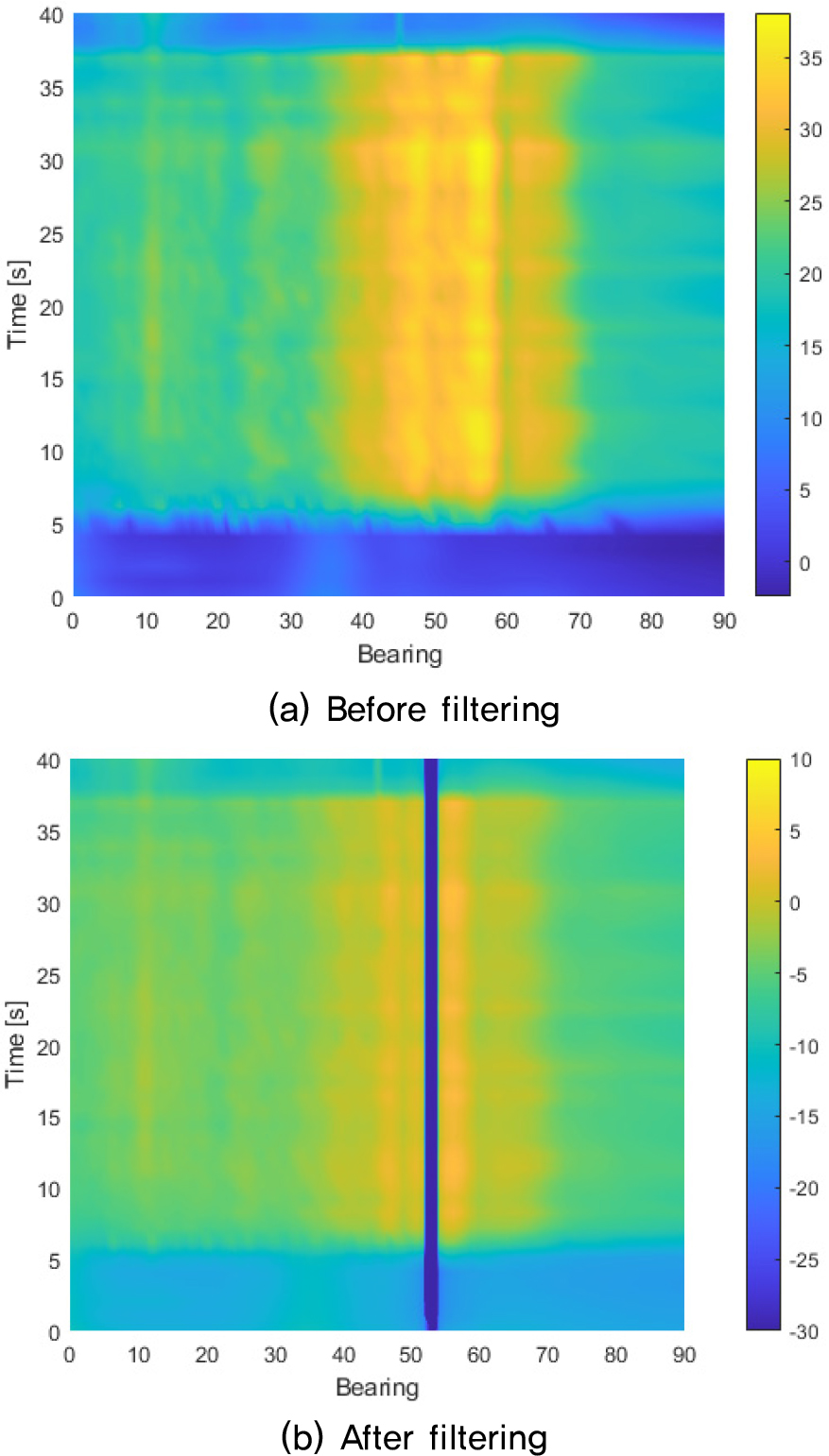
Fig. 20에 GSFM OBPT에 RLS를 적용한 정합 필터 결과를 나타내었다. (a)는 필터링 전, (b)는 필터링 후 그리고 (c)는 두 그림을 겹쳐놓은 것이다. 그림을 보면 송신 직접파의 레벨이 6 dB 정도 감소하고 표적의 부엽이 약 5 dB 정도 감소하였다.
Figs. 13, 14, 15, 16, 17, 18, 19, 20의 결과를 통해 살펴볼 때 해상 실험에서도 송신 직접파의 제거가 가능한 것으로 판단되지만, 송신 직접파의 제거 성능은 시뮬레이션 보다 크게 저하된 것을 확인할 수 있다. 시뮬레이션과 해상 실험은 여러 조건이 다르기 때문에 현 단계에서 원인을 정확히 판별하기는 어렵다. 다만, 음향 반향 제거기 및 일반화된 부엽 제거기를 이용한 적응빔형성기 등 적응형 필터 기반의 알고리즘들이 잔향에 의해 성능이 저하되는 것이 보고되고 있음에 미루어 볼 때,[8] 본 논문에서 제안하는 알고리즘 또한 잔향에 의해 성능이 저하되었을 가능성이 높을 것으로 판단된다.
V. 결 론
본 논문은 고반복률을 가지는 양상태 소나 시스템에서 탐지 성능을 확보하기 위하여 송신 직접파를 제거하는 기법을 연구하였다. 본 논문에서 제안하는 알고리즘은 송신 직접파 방위의 신호를 원하는 신호로, 표적 방위의 신호를 입력 신호로 하는 적응형 필터를 이용하여 고안되었으며, 잔차 신호를 출력으로 얻음으로써 표적 방위의 신호에서 송신 직접파를 제거하도록 구성되었다.
본 논문에서 제안하는 기법의 성능을 검증하기 위하여 시뮬레이션과 실측데이터를 이용한 실험을 진행하였다. 시뮬레이션 결과 제안하는 알고리즘이 송신 직접파를 효과적으로 제거할 수 있음을 확인할 수 있었으나, 실측데이터에서는 성능이 다소 저하되는 것을 확인할 수 있었다. 적응형 필터 기반의 음향 신호처리 시스템에서 잔향에 의해 성능이 저하됨이 보고되고 있음을 고려하였을 때, 본 논문의 실험에서 시뮬레이션 대비 실측 데이터 성능이 저하되는 것 또한 잔향에 의한 영향이 있을 것으로 예상된다.
