

I. 서 론
II. 크래머 라오 하한을 이용한탐지 방위오차
III. 탐지 방위오차 및 위치추정 거리오차 알고리즘
3.1 탐지 시 방위오차
3.2 위치추정 시 거리오차
IV. 시뮬레이션
4.1 탐지 시 방위오차 시뮬레이션
4.2 위치추정 시 거리오차 시뮬레이션
V. 결 론
I. 서 론
실제 해양에는 표적으로부터 발생하는 신호성분과 인위·물리·지질학적 요소에 기인하는 소음성분이 존재하고, 이로 인해 발생된 음향신호는 표적의 위치나 소음신호의 세기에 따라 선 배열센서에 수신되는 신호 대 잡음비가 달라진다.[1] 그리고 신호 대 잡음비에 따라 배열센서의 탐지 성능이 변화되며,[2] 실제 소음 환경에서 빔 형성하는 경우 빔 조향 각에 따라 수신되는 소음의 세기가 달라져 배열이득이 변화한다.[3] 또한 음파전달 거리에 따른 전달손실, 배열센서의 형상(배열 간격과 센서 수) 등 신호 대 잡음비에 영향을 주는 음향학적 요소가 존재한다. 이와 같이 배열센서를 이용한 표적의 탐지 및 위치추정을 수행하는 경우 다양한 음향학적 환경 요소에 따라 그 성능이 달라질 것이다. 이를 위해 미 해군에서는 탐지 및 위치추정 효과도에 대하여 정의하고,[4] SHAREM(SHip Antisubmarine Warfare Readiness / Effectiveness Measuring) 훈련을 통해 환경 변화에 따른 분석을 수행한다.[5] 국내에서도 해양환경 정보를 입력인자로 수중음향 모델링을 실시하고 표적 기동 시나리오 기반의 시뮬레이션을 통해 탐지효과도 분석 연구가 수행되었다.[6-10]
일반적으로 표적을 탐지하는 경우 배열센서를 이용하여 빔 형성에 의한 표적의 방위를 추정하고, 그 정보를 분석한다. 이를 위해 배열센서에서 추정되는 표적의 방위오차를 계산해야 한다. 또한 표적의 위치를 추정하기 위해 2축 이상의 배열센서가 필요하며, 각 배열센서에서 수신되는 표적의 방위를 이용하여 위치를 추정하게 된다. 이러한 경우 실제 표적의 위치와 추정된 위치의 거리에 대한 오차 역시 계산되어야 할 것이다. 이와 같은 개념을 탐지 시 방위오차와 위치추정 시 거리오차로 정의하고 연구를 수행하였다.
배열센서에 대한 표적의 방위를 추정하기 위하여 DOA(Direction of Arrival) 기법이 수반된다. DOA 기법으로 배열센서에서 관측된 공분산 행렬의 고유치를 분리하고, 이를 이용하여 표적 신호의 방위에 대한 스펙트럼을 추정하는 ESPRIT(Estimation of Signal Parameters via Rotational Invariance Techniques)[11-13]과 MUSIC(MUltiple SIgnal Classification)[14,15] 등이 있다. 이를 이용하여 표적의 방위 추정 및 성능분석을 수행하는 연구가 진행되었고,[16-19] 국내에서도 근접장에서 방위각 오차에 따른 표적 거리 추정 기법에 대한 연구가 수행되어졌다.[20] DOA의 연구에 대한 문헌에서 신호 대 잡음비의 변화에 따른 다양한 결과를 기술하였고, 신호 대 잡음비가 작아질수록 방위추정 오차가 증가함을 확인할 수 있었다.
본 논문에서는 표적의 탐지 및 위치추정 시 신호 대 잡음비에 따른 방위 및 거리오차의 연구를 수행하고, 성능 분석 방안을 제시하였다. 방위오차의 확률적 분포특성을 추정하기 위하여 데이터의 최소 분산을 계산하는 크래머 라오 하한(Cramer Rao lower bound)을 적용하였다.[21] 이를 이용하여 표적의 위치나 선 배열센서의 상대적 위치에 따른 모의 환경을 설정하고, 주어진 표적에 대하여 신호 대 잡음비에 영향을 미치는 파라메터인 소음준위, 전달손실, 배열센서의 형상, 빔 조향 방위를 달리하는 경우 탐지 방위오차 및 위치추정 거리오차를 계산하는 시뮬레이션을 수행하였다.
본 논문의 구성은 다음과 같다. 2장에서는 크래머 라오 하한을 이용하여 방위오차를 계산하는 기법에 대해 기술하고, 3장에서는 탐지 방위오차 및 위치추정 거리오차를 계산하는 알고리즘에 대해 설명한다. 4장에서는 탐지와 위치추정을 위한 모의환경을 설정하고, 시뮬레이션에 대한 결과 도출 및 분석을 수행하였다. 마지막으로 5장에서 본 논문의 결론을 맺는다.
II. 크래머 라오 하한을 이용한탐지 방위오차
표적 탐지 시 배열센서를 이용하여 표적이 존재하는 방위를 추정한다. 이 경우 신호 대 잡음비의 변화에 따라 추정되는 방위의 오차가 달라진다. 표적을 탐지하는 경우 신호 대 잡음비에 따른 표적 방위의 확률적 분포를 계산하기 위하여 크래머 라오 하한을 이용하였다. 이를 위해 배열센서에 수신되는 표적 신호는 Eq. (1)과 같이 정의할 수 있다.[18]
 , (1)
, (1)
여기서  로
로  는 신호의 진폭,
는 신호의 진폭,  는 주파수에 따른 위상이다.
는 주파수에 따른 위상이다.  는 빔 조향 벡터로, 신호 대 잡음비에 따른 빔 조향 방위(추정되는 표적의 방위)
는 빔 조향 벡터로, 신호 대 잡음비에 따른 빔 조향 방위(추정되는 표적의 방위)  의 확률적 분포를 도출하여 추정되는 음원의 방위를 계산할 수 있다.
의 확률적 분포를 도출하여 추정되는 음원의 방위를 계산할 수 있다.  는 선 배열센서의 broadside 방향을 0°로 설정하였다.
는 선 배열센서의 broadside 방향을 0°로 설정하였다.
각 센서 간의 소음 성분은 통계적으로 독립 및 동일한 분포(Independently and Identically Distrituted, IID)를 가정하였다. 따라서 소음 벡터  은 평균이 0이고 공분산 행렬(covariance matrix)
은 평균이 0이고 공분산 행렬(covariance matrix)  를 가지는 순환대칭 복소 가우시안 랜덤 벡터(circularly- symmetric complex Gaussian random vector)이다. 배열센서에 수신되는 표적 신호의 파라메터 변수를
를 가지는 순환대칭 복소 가우시안 랜덤 벡터(circularly- symmetric complex Gaussian random vector)이다. 배열센서에 수신되는 표적 신호의 파라메터 변수를  와 같이 정의하면,
와 같이 정의하면,  로 표현할 수 있다. 그러므로 표적신호의 수신정보
로 표현할 수 있다. 그러므로 표적신호의 수신정보  에 대한 확률밀도함수는 Eq. (2)와 같다.[21,22]
에 대한 확률밀도함수는 Eq. (2)와 같다.[21,22]
 , (2)
, (2)
여기서  는 에르미트 연산자(Hermitian operator)이고,
는 에르미트 연산자(Hermitian operator)이고,  은 공분산 행렬이다. Eq. (2)를 이용하여
은 공분산 행렬이다. Eq. (2)를 이용하여  에 대한 크래머 라오 하한을 계산하기 위한 피셔 정보(Fisher information) 행렬
에 대한 크래머 라오 하한을 계산하기 위한 피셔 정보(Fisher information) 행렬  는 Eq. (3)과 같다.[21]
는 Eq. (3)과 같다.[21]
 . (3)
. (3)
이에 따른 크래머 라오 하한은  이다. 그러므로 피셔 정보를 빔 조향 방위
이다. 그러므로 피셔 정보를 빔 조향 방위  에 대하여 정리하면, 추정되는
에 대하여 정리하면, 추정되는  의 분포에 대한 최소 분산을 도출할 수 있고, Eq. (4)와 같이 정리된다.
의 분포에 대한 최소 분산을 도출할 수 있고, Eq. (4)와 같이 정리된다.
 , (4)
, (4)
여기서  은 빔 조향 벡터를
은 빔 조향 벡터를  에 대해 미분한 것이고, 이를 계산하기 위하여 빔 조향 벡터를 설정해야 한다. 만약
에 대해 미분한 것이고, 이를 계산하기 위하여 빔 조향 벡터를 설정해야 한다. 만약  개의 센서가
개의 센서가  의 균등간격 선 배열센서로 구성된 경우, 배열센서 중심으로부터 각 배열까지의 거리에 대한 위치벡터는 Eq. (5)와 같다.
의 균등간격 선 배열센서로 구성된 경우, 배열센서 중심으로부터 각 배열까지의 거리에 대한 위치벡터는 Eq. (5)와 같다.
 . (5)
. (5)
배열센서의 위치벡터 Eq. (5)에 따른 빔 조향 벡터는 Eq. (6)으로 표현된다.[23]
 , (6)
, (6)
여기서  는 파수(wave number)로
는 파수(wave number)로  이다. 빔 조향 방위
이다. 빔 조향 방위  에 대한 피셔 정보 Eq.(4)를 계산하기 위하여 Eq. (6)을
에 대한 피셔 정보 Eq.(4)를 계산하기 위하여 Eq. (6)을  에 대하여 미분하면, Eq. (7)과 같이 정리할 수 있다.
에 대하여 미분하면, Eq. (7)과 같이 정리할 수 있다.
 . (7)
. (7)
Eq. (7)에 수열의 합 공식을 적용하고, Eq. (4)에 대입하여  의 대한 최소 분산인 크래머 라오 하한을 계산하면 Eq. (8)이 된다.
의 대한 최소 분산인 크래머 라오 하한을 계산하면 Eq. (8)이 된다.
 . (8)
. (8)
Eq. (8)에서  은 배열센서에서 측정되는 신호 대 잡음비이 된다. 그리고 균등간격 선 배열센서에서 지향지수는
은 배열센서에서 측정되는 신호 대 잡음비이 된다. 그리고 균등간격 선 배열센서에서 지향지수는  이 되므로,
이 되므로,  은 지향지수에 대한 인자가 된다. 그러므로
은 지향지수에 대한 인자가 된다. 그러므로  은 소나방정식에서
은 소나방정식에서  와 같다. 여기서
와 같다. 여기서  은 음원준위(source level),
은 음원준위(source level),  은 전달손실(transmission loss),
은 전달손실(transmission loss),  은 소음준위(noise level)이다. 이와 같이 Eq. (8)에서 신호 대 잡음비 또는
은 소음준위(noise level)이다. 이와 같이 Eq. (8)에서 신호 대 잡음비 또는  가 높아질수록 추정되는 방위오차가 줄어들게 된다. 또한 분모의 코사인 함수의 인자인 빔 조향 방위
가 높아질수록 추정되는 방위오차가 줄어들게 된다. 또한 분모의 코사인 함수의 인자인 빔 조향 방위  에 의해 선 배열센서의 end fire인 ± 90°에 가까워질수록 추정되는 방위오차가 커지게 된다. 이는 선 배열센서에서 broadside보다 end fire의 유효빔폭이 넓으므로,[24,25] end fire에 가까워질수록 수신되는 소음의 양이 많아져, 이와 같은 결과가 도출되는 것이다.
에 의해 선 배열센서의 end fire인 ± 90°에 가까워질수록 추정되는 방위오차가 커지게 된다. 이는 선 배열센서에서 broadside보다 end fire의 유효빔폭이 넓으므로,[24,25] end fire에 가까워질수록 수신되는 소음의 양이 많아져, 이와 같은 결과가 도출되는 것이다.
III. 탐지 방위오차 및 위치추정 거리오차 알고리즘
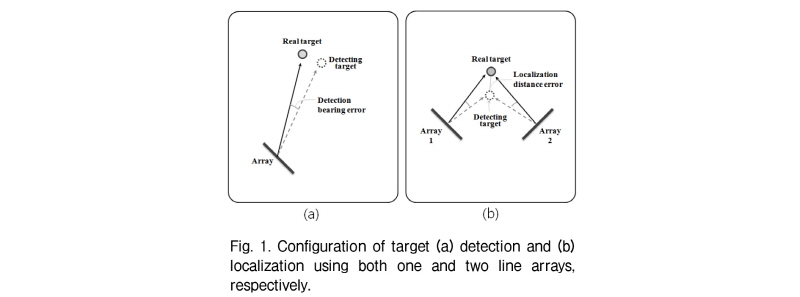
배열센서에서 표적을 탐지하는 경우 수신되는 신호의 방위오차는 Eq. (8)의 표준편차를 모수로 정의된 정규분포로부터 계산하였다. 또한 2축 배열센서에서 각각 탐지된 방위에 의해 위치가 추정되는 표적의 거리오차를 계산하였다. 표적을 탐지하는 경우 방위오차는 Fig. 1(a)와 같이 실제 표적의 방위와 배열센서에서 탐지된 표적의 방위 차이다. 위치추정하는 경우 거리오차는 Fig. 1(b)와 같이 실제 표적의 위치와 각각의 배열센서에서 추정된 방위각에 의한 교점 위치 간의 거리이다.
본 논문에서는 탐지 시 방위오차 및 위치추정 시 거리오차를 계산하는 알고리즘에 대해 기술하고, 그에 따른 시뮬레이션을 수행하였다.
3.1 탐지 시 방위오차
크래머 라오 하한에 의해 도출된 방위오차의 최소 분산으로부터 표준편차를 계산하고, 그에 따른 정규분포의 확률밀도함수를 Eq. (9)와 같이 계산할 수 있다.
 , (9)
, (9)
여기서  는 실제 표적의 방위이고, 추정되는 표적 방위와의 차인
는 실제 표적의 방위이고, 추정되는 표적 방위와의 차인  가 방위오차 각이 된다. 그리고
가 방위오차 각이 된다. 그리고  는 방위오차의 표준편차이다. Eq.(9)의 확률분포에 따른 방위오차를 계산하기 위하여 몬테카를로 시뮬레이션(Monte-Carlo simulation)을 수행하였다.
는 방위오차의 표준편차이다. Eq.(9)의 확률분포에 따른 방위오차를 계산하기 위하여 몬테카를로 시뮬레이션(Monte-Carlo simulation)을 수행하였다.
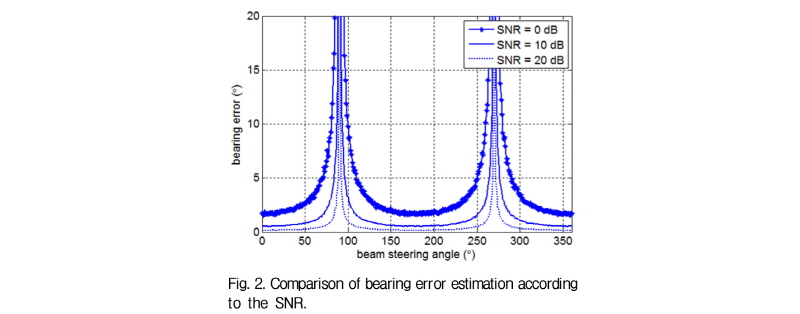
음원의 주파수는 1 kHz이고, 21개의 센서가 0.75 m 간격으로 배치된 배열센서에 대해 신호 대 잡음비가 0, 10, 20 dB인 경우의 방위오차를 계산하였다. 여기서 몬테카를로 시뮬레이션은 500회를 수행하였다.
Fig. 2에서 broadside는 0°, 180°이고, 이에 대해 빔 조향하는 경우 방위오차가 가장 낮아지는 것을 확인하였다. broadside에서 신호 대 잡음비가 0 dB인 경우 약 1.77°, 10 dB는 약 0.54°, 20 dB는 약 0.16°의 방위오차가 발생하는 것을 확인하였다. 그리고 end fire인 90°, 270°에 가까워질수록 방위오차가 점차 커지는 것을 확인하였다.
선 배열센서의 broadside와 end fire에서 방위오차가 달라지는 이유는 유효빔폭의 차이로 인한 것으로 판단된다. Fig. 3은 주파수 1 kHz에서 21개의 센서가 0.75 m로 균등간격으로 배치된 경우의 빔 조향된 빔 패턴이다. 여기서 선 배열센서는 검은색 굵은 실선과 같이 90-270°방위로 배치되어 있고, 빔 조향 방위는 0, 30, 60, 90°이다.
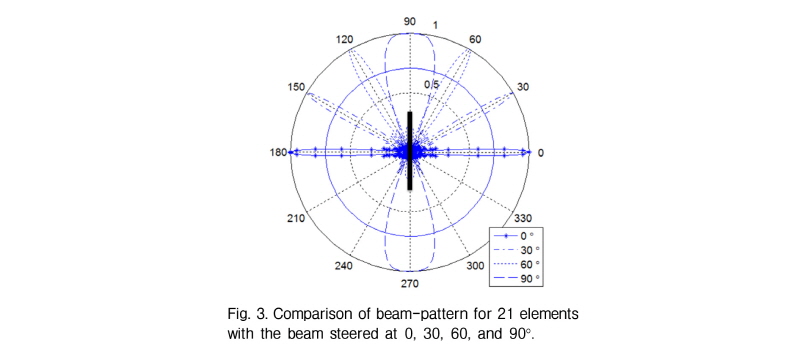
Fig. 3과 같이 선 배열센서의 주배엽의 유효빔폭은 broadside(빔 조향 방위 0°)에서 가장 좁고, end fire(빔 조향 방위 90°)에 가까워질수록 넓어진다. 그러므로 소음이 천해에서 원통형 확산하는 경우, 수평 선 배열센서에 수신되는 소음의 음향에너지가 end fire에 가까워질수록 많아지므로 신호 대 잡음비가 감소되고, 방위오차가 증가하게 된다. 이로 인해 소음환경에서 빔 조향각에 따라 방위오차가 달라지는 것을 알 수 있다.
3.2 위치추정 시 거리오차
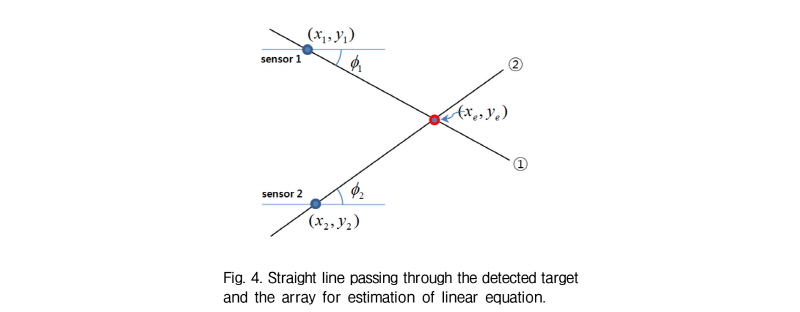
2축 배열센서를 이용하여 표적을 위치추정하는 경우 각 배열센서의 방위오차로부터 추정되는 표적의 위치를 계산해야 한다. 이를 위해 두 배열센서에 대한 직선의 방정식을 설정해야 한다.
Fig. 4에서 각 배열센서의 위치와 위치추정된 표적의 한 지점을 지나가는 직선을 도시하였다. 여기서 두 배열센서에서 방위오차 각에 의해 추정된 표적의 좌표를  ,
,  라 하였다. 이에 대하여 배열센서 1에서 표적을 잇는 직선방정식을 Eq. (10), 배열센서 2에서 표적을 잇는 직선방정식을 Eq. (11)으로 표현할 수 있다.
라 하였다. 이에 대하여 배열센서 1에서 표적을 잇는 직선방정식을 Eq. (10), 배열센서 2에서 표적을 잇는 직선방정식을 Eq. (11)으로 표현할 수 있다.
 . (10)
. (10)
 , (11)
, (11)
여기서  과
과  는 직선방정식의 기울기로, 빔 조향 방위각이
는 직선방정식의 기울기로, 빔 조향 방위각이  과
과  인 경우
인 경우  ,
,  가 된다.
가 된다.  과
과  는 각 직선방정식에 대한
는 각 직선방정식에 대한  절편이다. 그러므로 배열센서의 좌표 및 빔 조향 방위각으로부터 기울기
절편이다. 그러므로 배열센서의 좌표 및 빔 조향 방위각으로부터 기울기  와
와  절편
절편  를 도출할 수 있다. 방위오차로부터 추정된 표적의 좌표
를 도출할 수 있다. 방위오차로부터 추정된 표적의 좌표  와
와  와의 관계식을 정리하면 Eqs. (12)와 (13)이 된다.
와의 관계식을 정리하면 Eqs. (12)와 (13)이 된다.
 . (12)
. (12)
 . (13)
. (13)
Eqs.(12)와 (13)을  와
와  에 대한 행렬 연산으로 정리하면 Eq. (14)가 된다.
에 대한 행렬 연산으로 정리하면 Eq. (14)가 된다.
 . (14)
. (14)
실제 표적위치와 방위오차에 의해 위치추정된 표적위치 간의 거리가 거리오차이다. 이와 같이 두 배열센서의 위치와 탐지 시 방위오차로부터 위치추정 거리오차를 계산할 수 있다.
간의 거리가 거리오차이다. 이와 같이 두 배열센서의 위치와 탐지 시 방위오차로부터 위치추정 거리오차를 계산할 수 있다.
IV. 시뮬레이션
실해역에서 표적을 탐지하는 경우 배열센서의 형상(센서의 수와 간격거리), 수신되는 소음의 세기, 표적과 배열센서의 거리에 따라 신호 대 잡음비가 달라진다. 그러므로 모의환경에서 방위오차 및 거리오차의 경향 분석이 필요하다. 이를 위해 시뮬레이션 환경을 설정하고, 방위오차의 확률적 분포에 따른 결과를 도출하기 위해 몬테카를로 시뮬레이션을 수행하였다.
4.1 탐지 시 방위오차 시뮬레이션
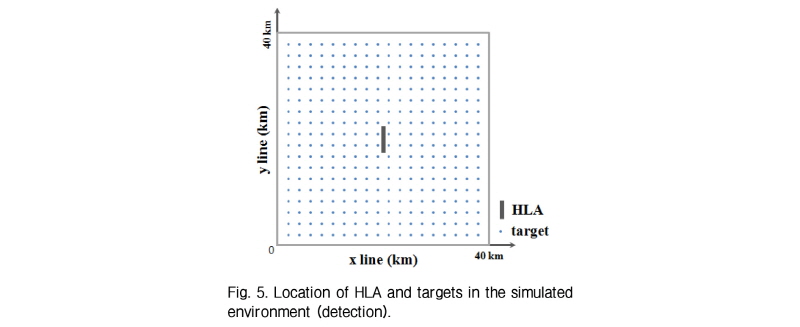
해양에서 표적을 탐지하는 경우 방위오차를 계산하기 위하여 Fig. 5와 같이 40 × 40 km의 구역에 대한 모의환경을 설정하였다. 해역의 중앙인 좌표 (20, 20) km 위치에 수평 선 배열센서(Horizontal Line Array, HLA)를 배치하였고, 수평 및 수직 간격 0.2 km마다 실제표적 을 분포시켰다.
을 분포시켰다.
전체 해역에 대해 음속은 1500 m/s로 일정하게 가정하였다. 그리고 전달손실은 천해의 조건을 가정하여, 거리가  인 경우
인 경우  로 설정하였다. 각 표적에 대해 신호 대 잡음비가 관련된 소나방정식 파라메터인
로 설정하였다. 각 표적에 대해 신호 대 잡음비가 관련된 소나방정식 파라메터인  를 계산하였고, 배열센서의 자세각을 고려하여 빔 조향 방위에 따른 방위오차를 계산하였다.
를 계산하였고, 배열센서의 자세각을 고려하여 빔 조향 방위에 따른 방위오차를 계산하였다.
표적의 음원준위가 140 dB, 탐지 주파수가 1 kHz일 때, 센서가 0.75 m 마다 균등간격으로 구성된 배열센서에 대한 탐지 방위오차를 계산하였다. 여기서 배열센서의 수는 21개이다. 이와 같은 조건에서 소음준위가 80, 83, 86, 89 dB인 경우 Fig. 6과 같이 방위오차를 계산하였다.
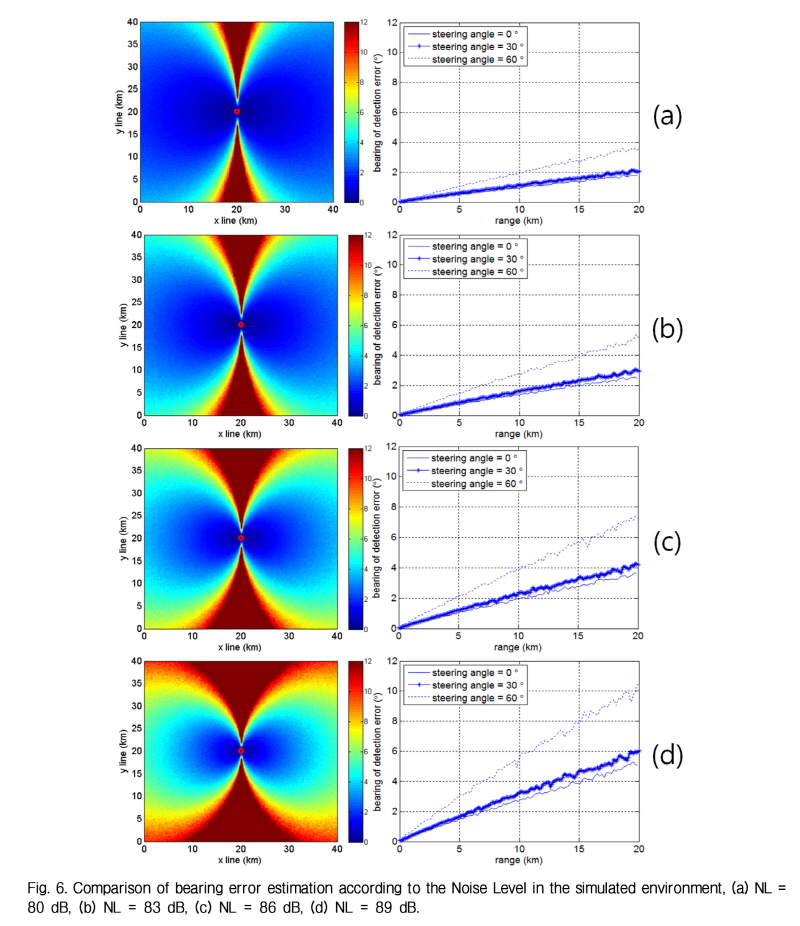
Fig. 6에서 좌측 결과는 모의환경에서 소음준위에 따른 방위오차이고, 우측 결과는 빔 조향 방위 0, 30, 60°에 따른 방위오차이다. Fig. 6의 우측 결과로부터 배열센서와의 거리 10 km에서 broadside 방향을 기준으로 소음준위 80 dB인 경우 약 1°, 83 dB인 경우 약 1.4°, 86 dB인 경우 약 2°, 89 dB인 경우 2.8°로 방위오차가 발생하는 것을 확인하였다. 이와 같이 소음준위가 높아질수록 신호 대 잡음비가 감소되므로 방위오차가 증가함을 확인할 수 있다. 또한 표적과의 거리가 멀어질수록 전달손실에 의해 수신되는 음압준위가 낮아지므로 신호 대 잡음비가 감소되어 방위오차가 증가한다. 또한 broadside에서 end fire로 가까워질수록 방위오차가 증가하는 결과를 보였다. 이는 Fig. 3에 제시된 선 배열센서의 유효빔폭에 따라 수신되는 소음의 음향에너지가 달라지기 때문이다. 모의환경을 통한 결과로부터 배열센서의 유효빔폭이 방위오차 계산 결과에 영향을 미치는 것을 확인하였다.
4.2 위치추정 시 거리오차 시뮬레이션
표적의 위치를 추정하기 위해 2축 이상의 배열센서를 사용해야 한다. 본 절에서는 Fig. 6과 같이 2축의 수평 선 배열센서를 배치하여 위치추정 시 거리오차를 계산하였다. 좌측 배열센서는 Fig. 5의 배열센서를 반시계 방향으로 120°로 회전하였고, 우측 배열센서는 시계 방향으로 120°로 회전하여 배치시켰다. 환경적인 요소는 4.1절에서 표적을 탐지하는 모의환경과 동일하게 설정하였다.
위치추정 거리오차 시뮬레이션은 다음과 같은 두 가지 경우에 대한 결과를 제시하였다. 첫 번째는 선 배열센서의 중심간 거리를 고정하고 소음준위가 달라지는 경우, 두 번째는 동일한 소음준위에서 선 배열센서의 중심간 거리가 변경될 경우 위치추정 거리오차 결과를 도출하였다.
첫 번째 경우는 두 배열센서의 중심 간 거리를 3 km로 고정하고 소음준위 80, 85, 90 dB에 대한 해역의 위치추정 거리오차를 계산하였다. 그리고 각 결과를 비교하기 위하여 Fig. 7과 같이 해역의 중앙인 좌표 (20, 20) km 위치에서 화살표 방향으로 거리가 멀어짐에 따른 위치추정 거리오차를 계산하였다. 선 배열센서 간의 거리가 동일한 경우 소음준위에 따른 위치추정 거리오차는 Fig. 8과 같다.
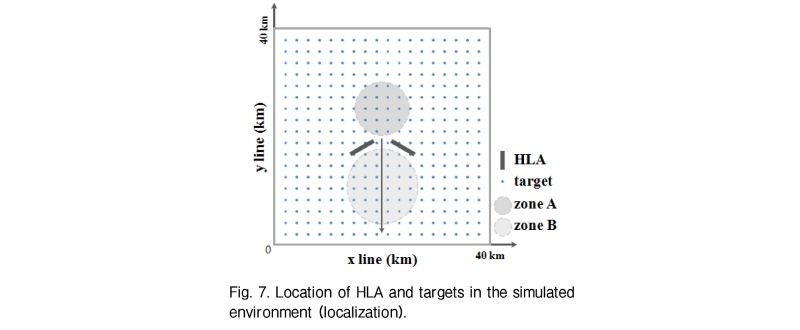
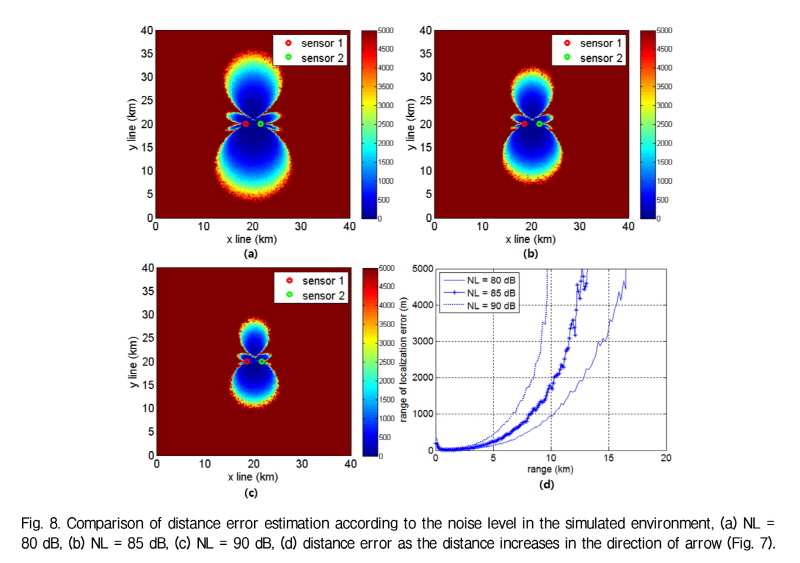
Fig. 8의 (a), (b), (c)는 모의환경에서 소음준위가 80, 85, 90 dB인 경우 위치추정 거리오차이고, Fig. 8의 (d)는 Fig. 7에서 화살표 방향으로 거리가 멀어지면서 소음준위 변화에 따른 위치추정 거리오차이다. Fig. 8의 (d)로부터 화살표 방향으로 거리 10 km를 기준으로 소음준위 80 dB인 경우 약 1,000 m, 85 dB인 경우 약 1,800 m, 90 dB인 경우 약 5,000 m로 위치추정 거리오차가 발생하고, 거리가 멀어짐에 따라 기하학적으로 증가하는 것을 확인하였다. 이와 같이 위치추정 거리오차는 탐지 시 방위오차와 같이 소음준위가 높아지거나, 배열센서와 표적과의 거리가 멀어질수록 거리오차가 증가하는 것을 확인할 수 있다. 그리고 위치추정 교차점이 end fire 방향에 형성되는 zone A보다 broadside 방향에서 형성되는 zone B에서 1,000 m 미만의 거리오차를 나타내는 영역이 넓게 나타나는 비대칭적인 형태가 됨을 확인하였다. 또한 Fig. 9와 같이 두 배열센서에 대해 직선이 가리키는 방향으로 거리오차가 상대적으로 높게 나타났다.
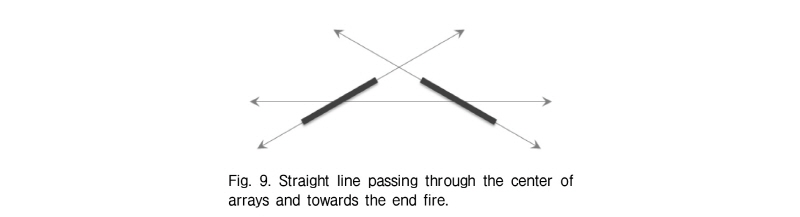
Fig. 9에서 직선들은 두 배열센서의 중심을 지나고, 또한 각 배열센서의 end fire를 향한다. end fire의 경우 앞 서 설명한 바와 같이 유효빔폭이 넓기 때문에 수신되는 소음의 음향에너지가 많아진다. 이에 따라 신호 대 잡음비의 감소에 의해 방위오차가 높아지므로 위치추정 거리오차 역시 증가한다. 또한 두 배열센서의 중심을 지나는 직선의 선상에 표적이 위치하게 되면, 각 배열센서와 표적을 지나는 직선이 서로 겹치므로, 방정식에서 해가 무수히 많은 부정이 된다. 이는 Eq. (14)에서 두 직선의 기울기  와
와  가 같아지면 역행렬이 존재하지 않으므로, 직선의 교점이 계산되지 않는 것과 같다. 이러한 경우 위치추정이 쉽지 않고, 거리오차가 매우 높아진다.
가 같아지면 역행렬이 존재하지 않으므로, 직선의 교점이 계산되지 않는 것과 같다. 이러한 경우 위치추정이 쉽지 않고, 거리오차가 매우 높아진다.
두 번째 경우는 소음준위가 85 dB인 경우 두 배열센서의 중심 간 거리 3, 6, 9, 12 km에 대한 해역의 거리오차를 Fig. 10과 같이 계산하였다. Fig. 10으로부터 Fig. 7의 화살표 방향으로 거리 10 km를 기준으로 두 배열센서의 중심 간 거리 3 km인 경우 약 1,900 m, 6 km인 경우 약 1,600 m, 9 km인 경우 약 1,350 m, 12 km인 경우 약 1,200 m로 위치추정 거리오차가 발생한 것을 확인하였다. 이와 같이 Fig. 10에서 배열센서의 중심 간 거리가 멀어질수록 zone B의 원거리 구역에 대한 위치추정 거리오차가 감소하는 것을 확인하였다. 반면에 zone A의 거리오차는 점차 증가하고, (d)의 경우 거리오차가 현저히 높은 것을 확인하였다. 또한 배열센서 간의 거리가 멀어질수록 Fig. 9에서 나타나는 직선의 근거리 구역에 대한 거리오차가 증가하였다. 이로부터 소음준위가 동일한 모의환경에서 각 배열센서 간의 거리에 따른 위치추정 성능이 달라지는 것을 확인 할 수 있다.
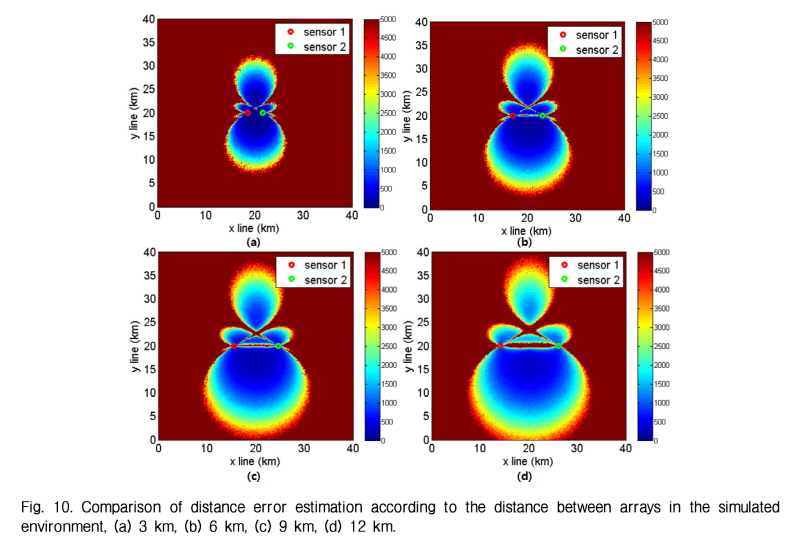
근거리의 위치추정 성능을 높이기 위해서는 배열센서 간의 거리가 좁아져야 하고, 원거리의 성능을 높이기 위해서는 거리가 멀어져야 하는 트레이드 오프 관계가 된다. 위치추정의 목적에 따라 주어진 해양 환경에서 배열센서 간의 거리를 조정하는 것이 위치추정 성능을 결정하는 요인이 될 수 있다.
