

I. 서 론
II. MIMO 수신부 보상구조
2.1 MIMO 수동형 시역전
2.2 MIMO 수신부 보상구조
III. 해상실험
3.1 해상실험 환경
3.2 전송 신호
IV. 실험 결과
4.1 채널응답특성
4.2 통신성능분석
V. 결 론
I. 서 론
수중음향통신은 군사적 목적뿐만 아니라 해양기술발전과 더불어 해양탐사 활동에도 필요성이 부각되고 있다. 더불어 고속 및 대용량 전송이 필요해짐에 따라 MIMO(Multi Input Multi Output) 통신에 대한 연구도 활발하다.[1,2]
그러나 수중환경에서는 해양 매질의 특성상 전달손실이 적은 음향을 사용하므로 육상에서의 전파통신보다 반송주파수가 낮아 신호의 대역폭이 제한되어 통신용량 증가에 어려움이 따른다. 또한 다중경로로 인한 지연확산 채널과 환경적 혹은 인위적 플랫폼 이동으로 인한 도플러 확산 채널 특성으로 인접 심볼 간 간섭(Inter Symbol Interference, ISI)이 발생하여 통신성능이 저하된다.[1-4]
MIMO 통신의 경우 채널특성으로 인한 ISI뿐만 아니라 다중음원이 존재하므로 채널 간 간섭(Cross-talk)으로 인한 혼선이 가중되어 통신성능이 더욱 열악하다. 이러한 혼선을 완화하고 통신성능을 개선하기 위하여 다이버시티 기술이 활용되고 있으며, 적응형 등화기 혹은 시역전 기술을 MIMO 시스템에 접목한 연구가 이루어지고 있다. 국외의 경우 MIMO통신에 대한 연구가 시뮬레이션 뿐만 아니라 해상실험을 통하여 실험적 검증을 수행하고 결과를 제시하는[5-8] 반면 국내에서는 시뮬레이션 혹은 수조에서의 MIMO 통신에 대한 연구에 머무르고 있다.[9-11]
본 논문에서는 기 연구된 시역전 기술을 바탕으로 2015년 5월 제주도 남쪽으로 100 km 떨어진 동중국해 북부해역에서 한미 공동으로 해양학 및 수중음향학 연구를 위해 수행한 SAVEX15(Shallow-water Acoustic Variability Experiment 2015) 실험에서 취득한 MIMO 통신 데이터에 수동형 시역전을 적용하여 실험적 검증을 수행하고자 한다.
본 논문의 구성은 다음과 같다. II장에서 MIMO 시역전 통신의 수신부 보상구조를 설명하고, III장에서는 해상실험 및 전송신호에 대하여 언급한다. IV장에서는 분석 결과를 정리하며, 마지막으로 제 V장에서는 결론을 맺는다.
II. MIMO 수신부 보상구조
2.1 MIMO 수동형 시역전
시역전(Time Reversal Mirror, TRM) 기술은 오래전부터 연구되어 왔으며 수중음향통신에서 자기등화기술로 활용되고 있다. 또한 시역전 기술을 MIMO 시스템에 적용하여 보상구조의 연산량을 감소하고 통신성능을 개선한 바 있다.[5,7]
|
Fig. 1. Description of active TRM for MIMO system. |
|
Fig. 2. Description of passive TRM for MIMO system. |
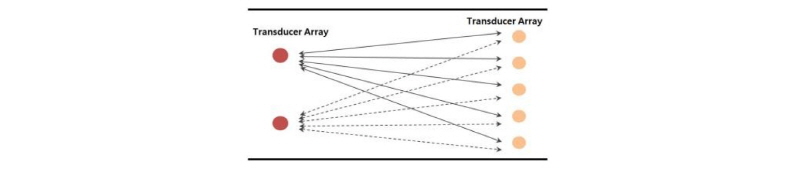

능동형 시역전의 경우 양방향 전파과정을 필요로 하며 Fig. 1과 같다. 수신된 신호를 시역전하여 되전파할 경우 가역성 원리로 인하여 방사된 음원에 재집속하는 것으로 수심-거리에 따른 다중 채널의 분리가 이루어진다. 또한 되전파 수행 시 다중경로의 신호가 재음원이 되므로 공간다이버시티와 동일한 효과로서 다중경로의 수가 많을수록 성능이 우수하다.
반면 수동형 시역전의 경우 Fig. 2와 같이 한방향 전파과정만을 필요로 하며, 수신부에서 수치적 정합필터를 수행하여 자기 등화를 구현하게 된다.[5-7,11-13]
 개의 다중송신채널(user)로부터 수신된 신호는 Eq.(1)과 같이 표현된다.
개의 다중송신채널(user)로부터 수신된 신호는 Eq.(1)과 같이 표현된다.
 , (1)
, (1)
 는
는  번째 송신자로부터의 송신신호이고
번째 송신자로부터의 송신신호이고  는
는  번째 음원으로부터
번째 음원으로부터  번째 수신기까지의 전달함수,
번째 수신기까지의 전달함수,  는 콘볼루션의 연산자를 나타낸다.
는 콘볼루션의 연산자를 나타낸다.
수동형 시역전의 경우 전달함수를 산출하여 수치적 정합필터를 수행하는 것으로 Eq.(2)와 같이 표현된다.
 , (2)
, (2)
여기서  는 수동형 시역전을 수행하여 재구성된
는 수동형 시역전을 수행하여 재구성된  번째 송신신호를 뜻하며, 능동형 시역전에서는
번째 송신신호를 뜻하며, 능동형 시역전에서는  번째 송신기에 재집속된 수신신호와 동일하다.[13-15]
번째 송신기에 재집속된 수신신호와 동일하다.[13-15]
2.2 MIMO 수신부 보상구조
시역전 기술을 바탕으로 하여 Fig. 2와 같은 환경에 적용한 MIMO 통신의 수신부 보상구조는 Fig. 3과 같다. 앞서 언급한 Eq.(2)를 기반으로 탐침 신호를 이용하여 다중채널 간의 전달함수를 산출하고 통신신호에 대하여 수치적 정합필터를 수행한다.
|
Fig. 3. Receiver block diagram with passive TRM for Fig. 2 |
|
Fig. 4. Demodulation block diagram including PLL. |
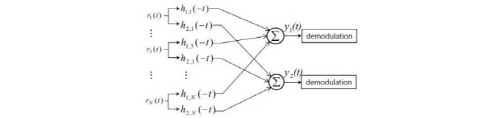
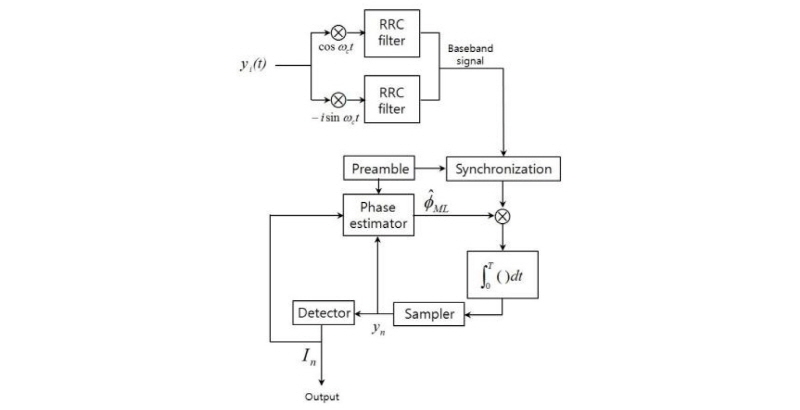
Fig. 3의 구조는 하나의 송신자와 수신자 N개 사이의 전달함수에 대하여 수치적 정합필터를 수행하는 기본적인 수동형 시역전 구조[12]를 송신자 수만큼 확장한 것으로 볼 수 있다.
 개의 수신신호와
개의 수신신호와  번째 탐침음원에 대한 전달함수를 도출하고 수치적 정합필터를 수행할 경우
번째 탐침음원에 대한 전달함수를 도출하고 수치적 정합필터를 수행할 경우  개의 신호는 모두 동일한 위상을 갖게되며 기타 송신자 음원에 대해서는 다른 위상을 갖게 된다. 이에 따라 비상관(incoherent) 합을 수행함으로써
개의 신호는 모두 동일한 위상을 갖게되며 기타 송신자 음원에 대해서는 다른 위상을 갖게 된다. 이에 따라 비상관(incoherent) 합을 수행함으로써  번째 송신자에 대한 음원의 상관성이 높고 기타 송신자의 음원의 상관성이 비교적 낮은 상태에서 배열이득을 얻게 되므로 채널 간 간섭신호의 세기를 완화한다.
번째 송신자에 대한 음원의 상관성이 높고 기타 송신자의 음원의 상관성이 비교적 낮은 상태에서 배열이득을 얻게 되므로 채널 간 간섭신호의 세기를 완화한다.
탐침음원을 이용하여 Fig. 3과 같이 수동형 시역전을 수행한 통신신호  를 도출한다. 수동형 시역전을 수행한 통신신호는 Fig. 4와 같은 복조과정을 수행한다. SAVEX15 실험에서 사용한 통신신호는 인접 심볼 간 간섭을 최소화하기 위해 RRC(Root Raised Cosine) 필터를 이용하여 변·복조 과정에서 정합필터로 사용한다. 또한 수동형 시역전 외에 추가적으로 ML(Maximum Likelihood) 기반의 위상고정루프(Phase Locked Loop, PLL)를 수행하여 위상변이를 보상한다.[4,12]
를 도출한다. 수동형 시역전을 수행한 통신신호는 Fig. 4와 같은 복조과정을 수행한다. SAVEX15 실험에서 사용한 통신신호는 인접 심볼 간 간섭을 최소화하기 위해 RRC(Root Raised Cosine) 필터를 이용하여 변·복조 과정에서 정합필터로 사용한다. 또한 수동형 시역전 외에 추가적으로 ML(Maximum Likelihood) 기반의 위상고정루프(Phase Locked Loop, PLL)를 수행하여 위상변이를 보상한다.[4,12]
III. 해상실험
3.1 해상실험 환경
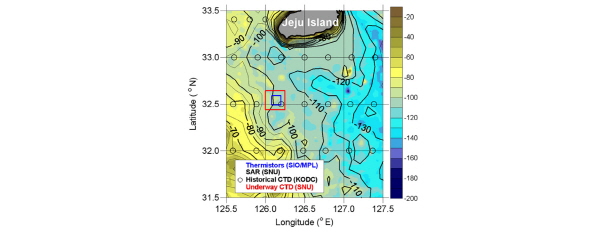
2015년 5월 14일부터 28일까지 제주도 남쪽으로 100 km 떨어진 동중국해 북부해역(Fig. 5)에서 단주기 해양변동특성, 수중음향 환경 및 수중음향 채널특성, 수중음향통신, 해양 배경잡음, 저·중주파 음파 전달특성에 대한 연구를 위해 한미 공동으로 SAVEX15 해상실험을 수행하였다. 음향데이터 취득을 위해 미국 스크립스 해양연구소의 SRA(Source Receive Array)를 송신기로 사용하였으며,[16] VLA(Vertical Line Array)를 수신기로 사용하였다.[17] SRA는 수심 23.0 ~ 75.5 m에 7.5 m의 일정한 간격으로 8채널이 배치되며, VLA는 수심 23.50 ~ 79.75 m에 3.75 m의 일정한 간격으로 16채널이 배치된다. SRA는 12 ~ 32 kHz 주파수 대역의 송신이 가능한 무지향성 음향센서를 사용하였으며, VLA는 2 Hz ~ 50 kHz 주파수 대역의 수신이 가능한 무지향성 음향센서를 사용하였다. VLA는 시스템적으로 500 Hz HPF(High Pass Filter) 처리가 되어있으므로 실질적으로 500 Hz ~ 50 kHz 주파수 대역의 수신이 가능하다.
|
Fig. 5. Experimental area in the East China Sea. |
|
Fig. 6. Mooring deployment positions of SRA and VLA. |
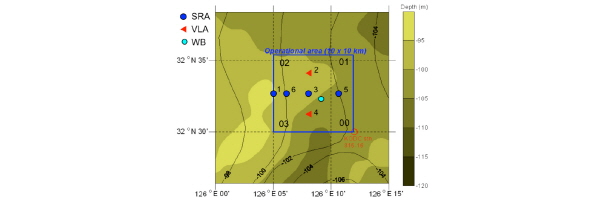
실험해역은 Fig. 6과 같이 KODC(Korea Oceanographic Data Center) 315-16 정점을 기준으로 10 × 10 km 반경을 선정하였으며, 해당 실험해역의 수심은 100 m 내외의 전반적으로 평탄한 지역이다. Station 2, 4번 위치에 수신기 VLA 2대를 각각 설치하고 SRA를 Station 1, 3, 5, 6번 위치로 이동해가면서 송수신 실험을 수행하였다. 실험해역의 해저면 저질 특성은 Sand에 가까웠으며,[18] 해상상태는 WMO(World Meteorological Organization) Sea State 기준 1 ~ 2 정도의 안정적인 상태를 유지하였다.
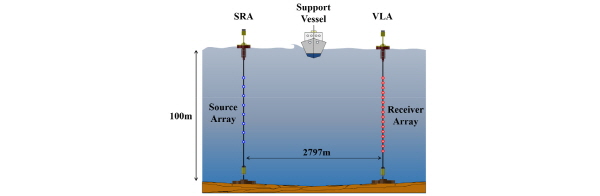
본 논문에서는 SRA가 Station 3지점에서 신호를 송신하고, Station 2 지점의 VLA가 수신할 때의 분석을 진행하며, 이 때 SRA와 VLA 거리는 2,797 m이며 수심은 100 m이다. Fig. 7은 본 논문의 분석환경의 송수신기 위치 모식도를 나타낸다.
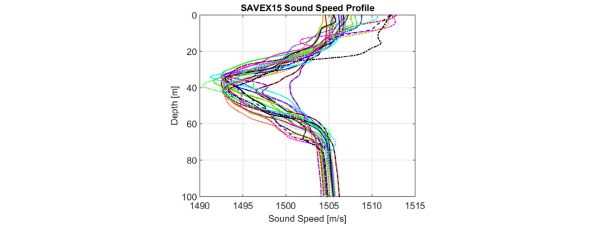
당시의 음속은 CTD(Conductivity, Temperature, Depth)를 이용하여 측정하였으며, 실험기간 동안 28번의 측정을 수행하였다. 측정된 음속 구조는 Fig. 8과 같으며 실험을 수행하는 동안 수온역전현상이 지속적으로 발생하는 것을 알 수 있다.
3.2 전송 신호
전송 신호의 패킷구조는 Fig. 9와 같으며, 전송신호는 중심주파수 16.5 kHz, 밴드폭 2.5 kHz로서, 시역전의 탐침음원으로 사용할 단일 톤 펄스 신호와 통신용 데이터 신호로 구성된다. 데이터 신호는 BPSK (Binary Phase Shift Keying)과 QPSK(Quadrature Phase Shift Keying) 두 종류 변조방식을 사용하였다. 각각의 BPSK/ QPSK 데이터 프레임에서 두 채널에서 송신된 신호가 서로 겹쳐 수신되어 채널 간 간섭이 발생한다. 인접 심볼 간 간섭을 최소화하기 위하여 roll-off factor가 0.25인 RRC 필터를 각각 변조와 복조 과정에서 정합필터로 사용하였으며, 통신용 데이터 신호는 96개 심볼을 가지는 프리앰블과 1632개 심볼로 구성된다. 이 때 단일 톤 펄스 신호의 길이는 5 ms, BPSK/QPSK로 구성된 데이터 신호의 길이는 약 900 ms이며, 단일 톤 펄스 신호와 데이터 신호 사이 가드 시간은 약 1800 ms이다.

IV. 실험 결과
4.1 채널응답특성
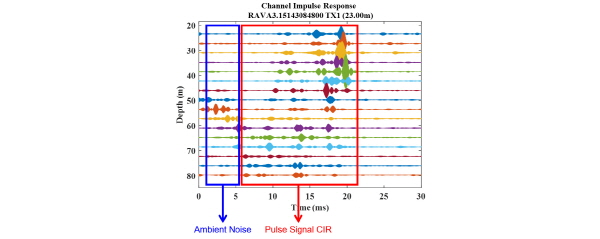
본 절에서는 통신패킷에 포함된 단일 톤 펄스 신호를 이용하여 채널응답특성을 도출하였다. 단일 톤 펄스 신호는 중심주파수 16.5 kHz, 밴드폭 2.5 kHz로 통신신호와 동일한 대역을 갖는 단일 주파수의 펄스 신호이다. Fig. 10은 8채널로 구성된 SRA에서 1번 채널이 송신한 단일 톤 펄스 신호가 16채널로 구성된 VLA로 수신될 때 각각의 수신채널에서의 채널응답특성 결과이며, 해당 결과는 수동형 시역전을 위한 탐침음원으로 사용한다. Fig. 10에서 보는 바와 같이 채널응답특성 분석 결과, 배경잡음 부분을 제외하고 실제로 단일 톤 펄스 신호는 다중경로에 대하여 약 15 ms 의 지연확산이 나타나는 것을 확인할 수 있으며, 수온역전층을 가지는 음속구조의 영향으로 직접파가 일부 반사파보다 늦게 수신되는 것을 확인할 수 있다. 이는 음선이론을 기반으로 한 Bellhop 음파전달모델을 통해 확인하였다.[19]
4.2 통신성능분석
본 절에서는 BPSK 변조방식과 QPSK 변조방식에 대하여 일반적인 동기화 과정과 수동형 시역전을 독립적으로 수행한 후 산출된 각각의 BER(Bit Error Rate)을 비교하여 MIMO 수중음향통신 성능을 검증하고자 한다.
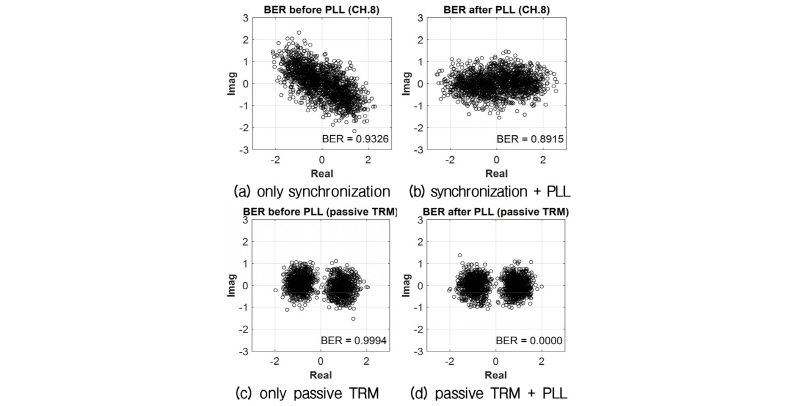
앞서 언급한 바와 같이 데이터 신호는 프리앰플 96개 심볼과 1632개 데이터 심볼을 전송하였다. 채널 1번에서 송신한 데이터와 채널 2번에서 송신한 데이터가 서로 채널 간 간섭이 발생한다. Fig. 11은 BPSK 데이터 신호의 일반적인 동기화 과정과 수동형 시역전을 활용하였을 때의 성상도 분석 결과이다.
Fig. 11(a)는 동기화만을 수행한 데이터 신호의 성상도이며, BER은 0.9326로 분석된다. Fig. 11(b)는 위상고정루프를 적용하여 위상이 보상된 성상도이며, BER은 0.8915로 나타났다. Fig. 11(c)는 수동형 시역전이 적용된 성상도로 간섭 제거가 확인되나 위상변이로 인하여 BER은 0.9994로 분석된다. Fig. 11(d)는 수동형 시역전 결과에 위상고정루프를 적용하여 위상이 보상된 성상도이며, BER은 0으로 나타나 채널 간 간섭을 완화하여 통신성능이 향상된 것을 확인할 수 있다.
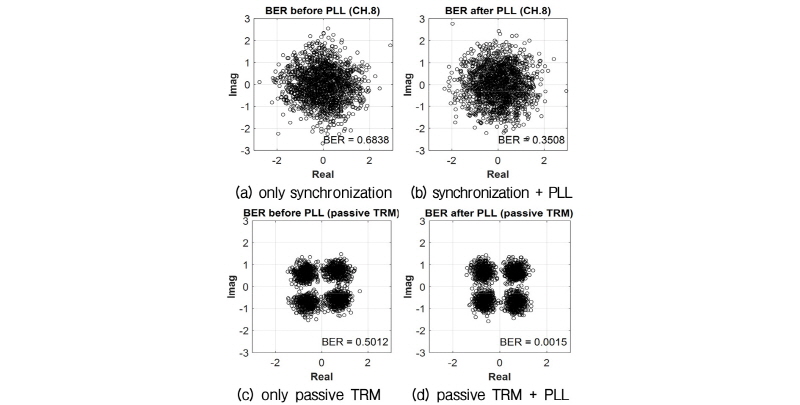
Fig. 12는 QPSK 데이터 신호의 일반적인 동기화 과정과 수동형 시역전을 활용하였을 때의 성상도 분석 결과이다. Fig. 12 (a)는 동기화만을 수행한 데이터 신호의 성상도이며, BER은 0.6838로 분석된다. Fig. 12(b)는 위상고정루프를 적용하여 위상이 보상된 성상도이며, BER은 0.3508로 나타났다. Fig. 12(c)는 수동형 시역전이 적용된 성상도로 간섭 제거가 확인되나 위상변이로 인하여 BER은 0.5012로 분석된다. Fig. 12(d)는 수동형 시역전 결과에 위상고정루프를 적용하여 위상이 보상된 성상도이며, BER은 0.0015로 나타나 채널 간 간섭을 완화하여 통신성능이 향상된 것을 확인할 수 있다.
채널 간 간섭으로 인하여 일반적인 동기화 과정 통해서는 신호의 복원이 어려운 것을 확인할 수 있으며, 수동형 시역전을 활용할 경우 채널 간 간섭을 완화하여 통신성능이 향상되는 것을 확인할 수 있다.
V. 결 론
해양에 대한 관심이 고조되면서 고속 및 대용량 전송의 통신방식이 필요해짐에 따라 MIMO 통신에 대한 연구가 이루어지고 있다. 그러나 국내의 경우 시뮬레이션 또는 수조에서의 MIMO 통신에 대한 연구결과를 제시할 뿐 해상실험을 통한 검증을 이루어지지 않는 실정이다. 본 논문에서는 MIMO 통신환경에서 인접 심볼 간 간섭 및 채널 간 간섭이 발생하였을 때 시역전 기법을 적용하여 신호를 분리하고 성능을 개선하고자 하였으며, 2015년 5월 한미공동으로 수행한 SAVEX15의 MIMO 실험 데이터를 활용하여 이를 검증하고자 하였다.
SAVEX15의 MIMO 실험 데이터를 분석한 결과 수온역전층이 형성됨에 따라 직접파가 일부 반사파보다 늦게 수신되며, 다중경로에 의하여 약 15 ms의 지연확산채널특성이 나타났다. 통신 신호의 경우 BPSK와 QPSK의 통신데이터를 분석하였으며, 동기화와 위상고정루프만을 적용한 BER은 각각 0.8915와 0.3508로 산출되었다. 반면, 수동형 시역전과 위상고정루프를 적용한 결과 BER은 각각 0과 0.0015로 분석되어 채널 간 간섭이 완화되고 통신성능이 개선됨을 보였다.
나아가 추후 연구로는 MVDR기반의 적응형 시역전을 MIMO 통신에 적용하여 잔여하는 채널 간 간섭을 제거하여 SNR을 높이고자 한다.
