

I. 서 론
압축센싱 기반 도래각 추정 기법은 신호의 희소성(sparsity)를 이용하여 도래각을 추정하는 방법으로써 기존의 도래각 추정 알고리즘과 비교했을 시 많은 장점을 지니고 있어 꾸준히 연구되어오고 있다 .[1,2] 그중 공분산 행렬 fitting을 통한 도래각 추정 기법인 경우 수신신호의 신호 공분산을 비용함수를 통해 희소하게 최적화함으로써 입사신호의 도래각을 추정한다. 해당 기법으로는 SpSF(Sparse Spectrum Fitting) 알고리즘이 대표적이다. 기존의 SpSF 알고리즘에 대한 연구는 모두 시간영역에서만 구현 되어있다. 본 논문은 기존의 시간 영역에서 연구되었던 SpSF를 주파수 영역으로 확장하기위해 주파수영역에서의 공분산 행렬을 유도했고 이를 SpSF 알고리즘에 적용함으로써 주파수 영역에서의 SpSF 알고리즘의 구현과정을 보이고 시뮬레이션을 통해 해당 알고리즘의 도래각 추정 성능을 보인다.
II. SpSF 알고리즘
SpSF는 공분산 행렬을 fitting 하여 도래각을 추정하는 방법이다. 센서 배열의 입사신호를  라 할 때, 공분산 행렬을 앙상블 평균(ensemble average)으로 구현하면 아래의 수식과 같이 표현 가능하다.[3,4]
라 할 때, 공분산 행렬을 앙상블 평균(ensemble average)으로 구현하면 아래의 수식과 같이 표현 가능하다.[3,4]
 (1)
(1)
여기서  는 신호 공분산이고
는 신호 공분산이고  는 잡음의 분산이다.
는 잡음의 분산이다.  은 사이즈가
은 사이즈가  인 단위행렬이다.
인 단위행렬이다.  는 탐색 하는
는 탐색 하는  수이고 센서 배열의 개수가 M일 때 Steering matrix
수이고 센서 배열의 개수가 M일 때 Steering matrix  는 다음과 같이 표현할 수 있다.
는 다음과 같이 표현할 수 있다.
 . (2)
. (2)
실제로 앙상블 평균으로 구하는 것은 불가능하기 때문에 Eq. (3)와 같이 시간 평균(time average)으로 구한 공분산 행렬로 대체한다.
 . (3)
. (3)
여기서  는 시간평균으로 구한 신호공분산행렬이며
는 시간평균으로 구한 신호공분산행렬이며  는 잡음공분산행렬이다. SpSF 기법은 입사신호 상관 여부에 따라 상관성이 없는 신호의 도래각 추정과 일반적인 상관성을 가진 입사신호의 도래각 추정 두 가지로 나뉜다.
는 잡음공분산행렬이다. SpSF 기법은 입사신호 상관 여부에 따라 상관성이 없는 신호의 도래각 추정과 일반적인 상관성을 가진 입사신호의 도래각 추정 두 가지로 나뉜다.
상관성이 없는 신호의 경우, 공분산 행렬은 대각성분만 non-zero 값을 가지고 대각성분 이외의 값들은 0이기 때문에 시간 평균으로 구한 공분산 행렬,  , 은 다음과 같이 표현할 수 있다.[5]
, 은 다음과 같이 표현할 수 있다.[5]
 . (4)
. (4)
위 식의 변수들은 다음과 같이 정의된다.
 . (5)
. (5)
 . (6)
. (6)
vec(*) 표기는 행렬의 column 들을 차례로 연결하여 긴 column vector를 생성하는 연산이다.
상관성이 없는 신호를 다룰 시, 신호 공분산 역시 대각선 성분만 존재한다. 신호공분산행렬을 벡터형태로 간단히 표현하기 위해 Eq. (7)과 같이 신호 공분산의 대각선 값들을 성분으로 갖는 신호 공분산 벡터  를 정의했다.
를 정의했다.
 . (7)
. (7)
 (8)
(8)
 . (9)
. (9)
각 array vector를 열(column)으로 갖는 행렬  은
은  행렬이다.
행렬이다.  는 M 보다 많기 (
는 M 보다 많기 ( ) 때문에 식 (4)을 만족하는 해가 무수히 많이 있다. 그 중에서 가장 희소한
) 때문에 식 (4)을 만족하는 해가 무수히 많이 있다. 그 중에서 가장 희소한  를 선택하는 비용함수 식은 식 (10)와 같이 정의된다.
를 선택하는 비용함수 식은 식 (10)와 같이 정의된다.
 . (10)
. (10)
비용함수 수식 중에서 L2-norm 연산 부분은 공분산 벡터  와 연산을 통해 추정된 신호공분산 벡터
와 연산을 통해 추정된 신호공분산 벡터  와
와  의 곱을 통해 구해지는 공분산 벡터의 차이를 나타낸다. 다시 말하자면, 최적화하는 과정에서 추정된 값들 중 참값과 가장 비슷한 추정 값을 선택하는 부분이라고 할 수 있다.
의 곱을 통해 구해지는 공분산 벡터의 차이를 나타낸다. 다시 말하자면, 최적화하는 과정에서 추정된 값들 중 참값과 가장 비슷한 추정 값을 선택하는 부분이라고 할 수 있다.
 에 대해 L1-norm 연산을 하는 부분은
에 대해 L1-norm 연산을 하는 부분은  의 희소성을 조절하는 부분이다. 가중치
의 희소성을 조절하는 부분이다. 가중치  값을 크게 설정함으로써, 기존의 신호와 연산을 통해 구한 추정데이터와의 차이를 줄이는 것보다 추정 데이터의 희소성을 강조한다. 반대로 가중치의 값을 작게 설정하게 되면 데이터의 희소성보다는 기존의 신호와의 차이를 최소화하는 것을 강조한다.
값을 크게 설정함으로써, 기존의 신호와 연산을 통해 구한 추정데이터와의 차이를 줄이는 것보다 추정 데이터의 희소성을 강조한다. 반대로 가중치의 값을 작게 설정하게 되면 데이터의 희소성보다는 기존의 신호와의 차이를 최소화하는 것을 강조한다.
Eq. (10)의 비용함수를 통해 최적화 작업을 반복함으로써 무수히 많은 해 중에서 가장 희소한 신호공분산 벡터를 구한다.
위와 같이 구한 신호공분산벡터는 탐색각도 index별 신호파워를 성분으로 갖고 있기에 0이 아닌 값이 위치한 신호공분산벡터  의 index를 통해 도래각을 추정할 수 있다.
의 index를 통해 도래각을 추정할 수 있다.
상관성이 있는 신호인 경우, 상관성이 없는 신호일 때와는 다르게 공분산 행렬의 대각성분 뿐만 아니라 다른 성분들 역시 0이 아닌 값을 갖는다. 따라서 가장 sparse 한 신호 공분산 행렬  를 구하는 비용함수는 다음과 같다.
를 구하는 비용함수는 다음과 같다.
 . (11)
. (11)
Eq. (11)의 비용함수 역시 Eq. (10)에서 설명한 것과 동일하게 가중치인  의 값을 조절함으로써 원 신호와 가장 흡사하면서도 희소성을 가지는 신호 공분산 행렬
의 값을 조절함으로써 원 신호와 가장 흡사하면서도 희소성을 가지는 신호 공분산 행렬  를 구한다. 가중치
를 구한다. 가중치  의 값을 정하는 방법인 경우,
의 값을 정하는 방법인 경우,  의 값을 양의 정수 방향으로 바꾸어가며 신호공분산 행렬
의 값을 양의 정수 방향으로 바꾸어가며 신호공분산 행렬  를 구하는 과정을 반복하고 해당 값들 중 Eq. (12)을 만족하는
를 구하는 과정을 반복하고 해당 값들 중 Eq. (12)을 만족하는  값을 가중치로 정한다.
값을 가중치로 정한다.
 . (12)
. (12)
실질적으로 잡음의 공분산 행렬은 신호처리 시 구할 수가 없다. 따라서 잡음 공분산 행렬의 통계적인 특성을 이용하여  을 Eq. (13)와 같이 유도를 함으로써 Eq. (12)을 통해 가장 적합한 가중치
을 Eq. (13)와 같이 유도를 함으로써 Eq. (12)을 통해 가장 적합한 가중치  를 구할 수 있다.[6] (주파수 영역인 경우, L은 block 개수를 표시한다).
를 구할 수 있다.[6] (주파수 영역인 경우, L은 block 개수를 표시한다).
 . (13)
. (13)
III. 주파수 영역에서의 공분산 행렬 구현 및 SpSF 알고리즘에 적용
시간 영역에서 센서배열에 입사되는 스냅 샷의 수(T)를 무한하게 취할 때 시간 평균으로 구한 공분산 행렬이 앙상블 평균으로 구하는 공분산 행렬과 유사함으로 공분산 행렬 구현할 때는 앙상블 평균으로 구현하는 방법대신 시간 평균으로 구한다.
주파수 영역에서 공분산 행렬을 구하려면 시간영역의 수신 신호 행렬을 FFT(Fast Fourier Transformation)하여 주파수 영역으로 변환하고 주파수 영역의 수신 신호 행렬을 얻은 후, 입사 신호에 대한 정보를 가지고 있는 bin을 선택해서 공분산 행렬을 구한다.
시간 영역에서 공분한 행렬을 시간 평균으로 구한 것과 유사하게 주파수 영역에서는 block 평균을 통해 공분산 행렬을 추정할 수 있다. 시간 영역의 수신신호 행렬을 block 개수만큼 일정한 사이즈로 나누고 각 block에 대해서 시간 영역의 수신신호 행렬을 FFT하여 주파수 영역으로 변환한다. 이렇게 변환한 주파수 영역의 수신신호 행렬에서 입사 신호의 에너지가 존재하는 bin을 선택하여 공분산 행렬을 구한다.
시간영역의 수신 신호 행렬을 FFT하고 b번째 block만을 취함으로써 구한 주파수 영역의 수신 신호 행렬  은 다음과 같이 정의 가능하다.
은 다음과 같이 정의 가능하다.
 . (14)
. (14)
신호 에너지 존재하는 bin을  으로 정의하면 주파수 영역에서 각 block에 공분산 행렬은 다음과 같이 정의한다.
으로 정의하면 주파수 영역에서 각 block에 공분산 행렬은 다음과 같이 정의한다.
 . (15)
. (15)
신호의 상관성이 없는 경우, 주파수 영역에서 구한 공분산 행렬을 벡터화한 결과를 Eq. (16)과 같이  로 정의한다.
로 정의한다.
 C. (16)
C. (16)
Eq. (16)에서 정의된 주파수 영역에서의 공분산 행렬을 SpSF 알고리즘에 적용함으로써 주파수 영역으로 확장한 SpSF 알고리즘을 정의할 수 있다. 신호의 상관성이 없는 경우, 주파수 영역으로 확장한 SpSF 비용함수는 아래의 식과 같이 표현 가능하다.
 (17)
(17)
신호의 상관성이 있는 경우, 주파수 영역으로 확장한 SpSF 비용함수는 Eq. (18)와 같이 정의 가능하다.
 (18)
(18)
주파수 영역으로 확장한 SpSF 알고리즘의 도래각 추정 과정은 앞서 기술한 시간 영역의 SpSF 알고리즘과 동일하다.
주파수 영역의 공분산 행렬을 이용한 공분산 fitting 기반 도래각 추정 기법의 장점은 서로 다른 주파수를 가지는 다수 개의 신호가 입사할 경우, 센서 배열에 대하여 각각의 신호 에너지가 존재하는 bin의 스펙트럼 값의 위상을 취하고 공분산 행렬을 구함으로써, SpSF 알고리즘을 통해 다수 개의 입사 신호들의 도래각 추정을 개별적으로 수행할 수 있다는 점이다.
또한 입사신호가 시간 영역에서 협대역 신호인 경우 시간 영역 신호는 시간 영역 index의 모든 값에 대하여 큰 값을 가진다. 그러나 협대역 신호의 특성상 DFT를 통하여 시간 영역 신호를 주파수 영역신호로 변환하면 협대역 신호는 특정 주파수 bin 들어서만 값을 가지며 다른 부분의 bin 들에서는 아주 작은 값을 가진다. 반면, 잡음은 백색 잡음이므로 잡음의 주파수 영역 스펙트럼은 모든 bin에 대하여 거의 같은 크기를 가진다. 따라서 주파수 영역에서 입사신호의 협대역 주파수에 해당하는 bin 만을 취하여 공분산 행렬을 추정하면 시간 영역에서 공분산 행렬을 구하는 것에 비하여 신호대잡음비 개선 효과가 있다. 이러한 현상은 하나의 주파수에 모든 에너지가 밀집된 변조가 없는 정현파(sinusoidal signal, tone signal)을 입사신호로 받을 때 극대화된다. 이에 의해 수중환경과 같이 다양한 잡음으로 인해 도래각 추정에 어려움이 있는 상황에서 입사 신호의 도래각 추정 성능을 향상시키는 효과가 있다.
IV. 수치 결과
기존의 도래각 추정 알고리즘인 CBF(Conventional Beamforming) 알고리즘, MVDR(Minimum Variance Distor-tionless Response) 알고리즘과 MUSIC(Multiple Signal Classification)알고리즘의 성능과 SpSF 알고리즘의 도래각 추정 성능을 비교 분석한다.[4,7]
FFT 사이즈는 2048로 설정하였고 해당 신호 bin 데이터를 가지고 시뮬레이션을 실행한다. 가중치 는 10부터 100까지 logscale로 바꾸어가며 SpSF 알고리즘을 실행하고 Eq. (12)을 이용하여 가장 적합한 가중치를 선택한다. 시뮬레이션은 입사신호의 개수가 2개인 경우를 다루었으며 시뮬레이션 환경은 Table 1과 같이 주어진다.
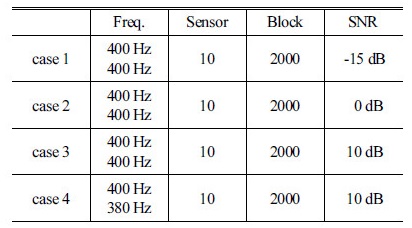
2개의 입사신호를 다루는 경우, 두 입사신호의 주파수가 400 Hz로 동일한 경우와 400 Hz와 380 Hz로 서로 다를 경우를 다루었다. 두 입사신호의 주파수가 동일한 경우 SNR(Signal to Noise Ratio)을 -15 dB, 0 dB 그리고 10 dB로 바꾸어가며 시뮬레이션을 진행했다. SNR이 –15 dB와 0 dB인 경우, 두 신호는 30°와 70°에서 입사하도록 설정했다. 주파수 영역에서 구현한 SpSF의 분해능을 확인하기위해 SNR이 10 dB인 경우, 두 입사 신호를 15°와 30°에서 입사하도록 설정했다. 또한 두 입사신호의 주파수가 서로 다르게 설정된 경우, 15°로 입사하는 신호의 주파수를 400 Hz로 설정하고 .35°로 입사하는 신호의 주파수를 380 Hz로 설정함으로써 서로 다른 주파수를 가지는 다수 개의 신호가 입사할 경우 주파수 영역으로 확장한 SpSF 알고리즘을 통해 다수 개의 입사 신호들의 도래각 추정을 개별적으로 수행함을 보이고 SNR을 10 dB로 설정함으로써 도래각 추정 성능을 보인다.
Figs. 1과 2는 신호가 2개 입사한 경우로써 SNR이-15 dB일 때와 0 dB일 때의 도래각 추정 결과이다. Fig. 1인 경우, 낮은 SNR로 인해 CBF가 도래각 추정을 제대로 하지 못하는 것을 볼 수 있다. 이에 반해 MVDR, MUSIC 그리고 SpSF는 정상적으로 도래각 추정을 하는 것을 볼 수 있지만 MVDR이나 MUSIC인 경우 SpSF와 비교 시 성능이 떨어지는 것을 알 수 있다.
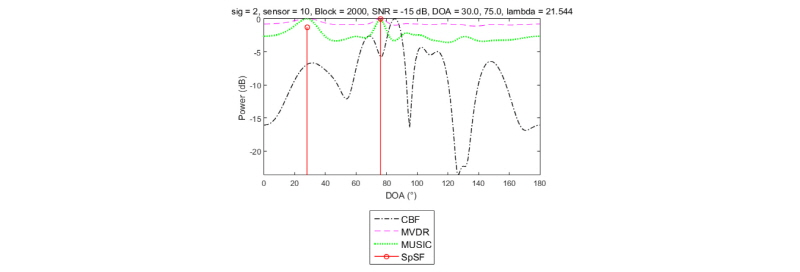
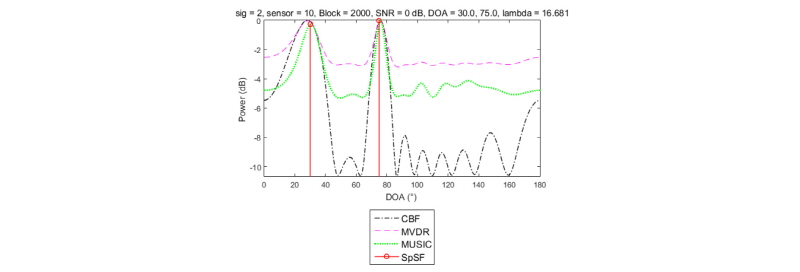
Fig. 2인 경우, MVDR, MUSIC 그리고 SpSF 알고리즘인 경우 2개의 신호가 입사한 위치에서 가장 큰 스펙트럼 값이 가지는 것을 볼 수 있다. CBF인 경우 두 입사신호 중 한 신호에 대해서만 정확한 추정을 하고 나머지 신호에 대해서는 추정 오차가 발생함을 볼 수 있다.
Fig. 3은 SNR이 10 dB이고 신호가 2개 입사할 때 입사 각도가 15°와 30°로 서로 근접해있을 시, 각 알고리즘의 도래각 추정 결과를 보여주고 있다. 해당 그래프를 통해 주파수 영역으로 확장한 SpSF 알고리즘만이 두 각도를 정확히 분해를 하여 도래각 추정을 해내는 것을 볼 수 있고 CBF, MVDR 그리고 MUSIC인 경우는 추정을 하지 못하는 것을 볼 수 있다.
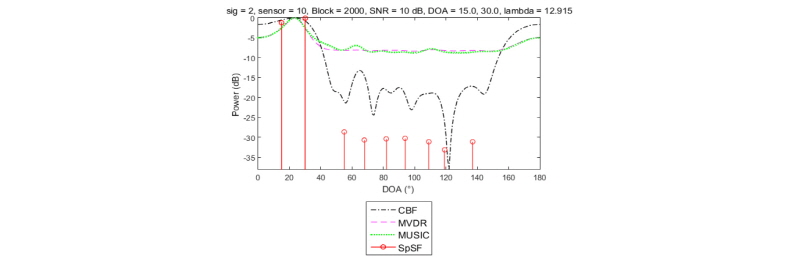

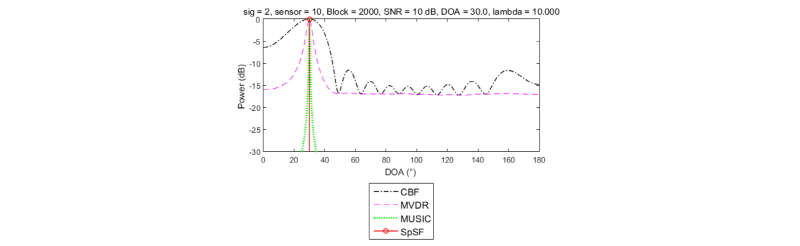
Table 2는 각 알고리즘의 구동시간을 보여준다. SpSF 알고리즘인 경우 도래각 추정과정 이외에 최적의 가중치를 찾는 과정이 추가로 들어가기 때문에 기존의 다른 도래각 추정 알고리즘보다 구동시간이 더 긴 것을 확인할 수 있다.
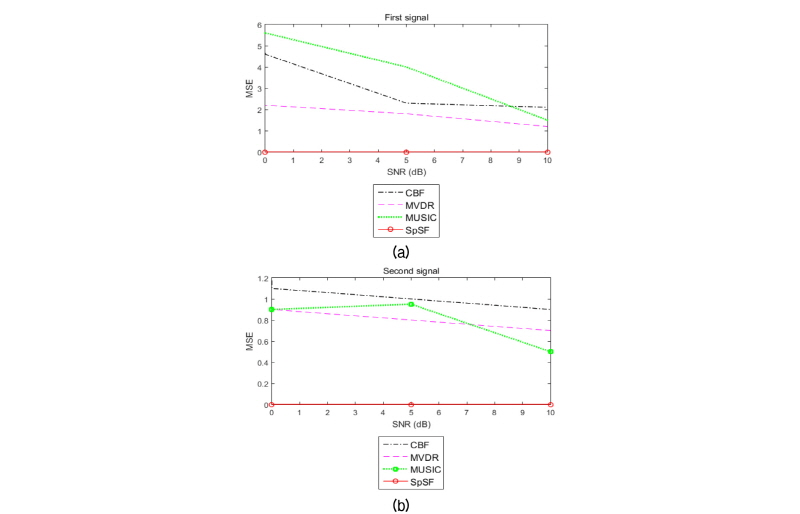
Fig. 5는 400 Hz인 주파수를 가진 두 신호가 입사하는 경우, SNR에 따라 변화하는 CBF, MVDR, MUSIC, 그리고 SpSF의 MSE를 보인다. Fig. 5를 통해 SpSF 알고리즘의 MSE 값이 전 SNR 구간에서 가장 작게 나오는 것을 확인할 수 있다. 이를 통해 SpSF알고리즘의 추정 성능이 다른 도래각 추정 알고리즘보다 더 우수함을 알 수 있다.
V. 결 론
본 논문은 기존의 시간 영역에서 다룬 압축센싱 기반 공분산 fitting 알고리즘을 주파수 영역으로 확장하였다. SpSF 알고리즘을 주파수 영역으로 확장하기 위해 주파수 영역에서의 공분산 행렬을 구하였고 해당 공분산 행렬을 SpSF 도래각 추정 알고리즘에 적용함으로써 주파수 영역으로 확장한 SpSF 알고리즘의 유도 과정을 보였다. 또한 주파수 영역으로 확장한 SpSF 알고리즘의 도래각 추정 성능 분석을 함으로써 기존 의 주파수 영역에서 구현된 도래각 추정 알고리즘에 비해 도래각 추정 성능이 더욱 우수하다는 것을 보여준다.
