

I. 서 론
II. 수동소나 표적신호
2.1 선박 소음원의 종류
2.2 소음원의 특징정보
2.3 표적신호 모델링
III. ICA 모델 및 알고리즘
3.1 순시혼합모델
3.2 컨볼루션 혼합모델
IV. 실험 및 검토
4.1 실험 조건
4.2 모의실험
V. 결 론
I. 서 론
소나 시스템은 수중환경에 존재하는 표적을 탐지하기 위한 시스템이다. 소나 시스템은 능동소나와 수동소나로 구분할 수 있는데, 그 중 수동소나 시스템은 함정의 소음원에서 방사되는 소음을 분석하여 소음원을 규명한다. 수동 소나 시스템의 신호처리 과정은 소음원에서 특징 정보를 추출하는 과정과 추출된 특징 정보를 이용하여 표적을 식별하는 과정으로 나누어진다. 표적의 특징 정보로는 신호를 주파수 분석했을 때 나타나는 토널 성분을 이용하는데, 표적의 종류 및 구동 특성에 따라 다른 주파수 성분이 나타나므로 이를 분석하면 표적의 식별이 가능하다.
센서의 탐지 영역 내에 다수의 표적이 존재할 경우 센서에서 관측되는 신호는 여러 표적에서 나오는 신호들이 혼합된 신호이다. 혼합된 관측 신호를 주파수 분석하여 전시하면 여러 표적으로 인한 토널 성분들이 혼재되어 나타나 주파수 성분을 특징 정보로 하는 표적 식별에서의 성능 저하를 야기한다. 따라서 여러 표적의 신호가 혼합된 신호에서 각각의 표적신호로 분리하는 과정이 필요한데 일반적으로 배열 센서를 이용한 빔 형성 기법을 사용한다. 표적이 각기 다른 방위에 존재하면 각 표적의 신호는 각 방위의 빔 데이터에서 크게 나타나므로 이는 표적신호를 공간적으로 분리할 수 있음을 의미한다. 하지만 서로 다른 표적들이 같은 방위에 존재할 경우 그 방위의 빔 데이터에서는 표적의 신호들이 같이 나타나므로 공간적으로 분리가 불가능하다는 점과 배열 센서가 없는 감시체계에서는 사용할 수 없는 등의 한계점도 있다.
본 논문에서는 수동소나 표적신호를 분리하는 과정에서 위에서 언급한 문제점을 해결하기 위한 새로운 접근 방법으로 음성신호처리에서 많이 연구되고 있는 BSS(Blind Source Separation) 기법 중 하나인 주파수영역 독립성분분석(Frequency Domain Independent Component Analysis, FDICA) 기법을 이용하여 혼합된 표적신호를 분리하는 방법으로 제안하였다. 함정에서 발생하는 소음원의 신호를 모델링하여 표적신호를 합성한 후, 표적의 위치에 따른 상황들을 가정하여 혼합신호를 만들고, FDICA를 통해 분리하는 모의실험을 수행하였다. 분리 전 후의 결과를 비교하기 위해 표적신호의 특징정보인 기계류 토널 성분과 프로펠러 성분의 분리 결과를 LOFAR(Low Frequency Analysis and Recording) 및 DEMON(Detection Envelope Modulation On Noise)으로 전시하고 비교하였다
본 논문의 구성은 다음과 같다. II장에서는 수동소나의 표적신호와 모의실험에 사용한 신호 모델링 방법에 대해 설명하고, III장에서 표적분리에 사용되는 독립성분분석(Independent Component Analysis, ICA)에 대하여 기술한다. IV장에서는 합성 신호를 이용하여 표적위치 설정 시나리오에 따른 모의실험을 수행한 결과를 분석하고, V장에서 결론을 맺는다.
II. 수동소나 표적신호
2.1 선박 소음원의 종류
수동소나 시스템의 주된 표적신호는 선박에서 발생하는 소음을 다룬다. 소음을 발생 원인에 따라 분류하면 크게 기계류 소음, 공동소음 그리고 유체 소음으로 나눌 수 있다. 기계류 소음은 선박의 많은 기계류 부품의 동작으로 인해 발생된다. 기계류의 동작으로 인한 진동이 선체의 표면을 통해 수중으로 전파되면서 발생하는 진동소음의 일종이다. 공동소음은 프로펠러의 회전으로 발생하는 공동현상에 의해 발생하는 소음이다. 프로펠러가 고속으로 회전할 때 프로펠러 후방의 압력이 낮아져 수중에 용해되어 있던 기체들이 저압부로 이동하여 기포를 형성하는데 이를 공동현상이라 한다. 이와 같이 형성된 기포들은 압력의 변화 등에 의해 소멸되면서 소음을 발생시키는데 이를 공동소음이라 한다. 유체 소음은 선박과 유체간의 상호작용으로 인해 발생하는 소음으로 선박의 구조 및 속도에 연관되어 있다.[1,2]
2.2 소음원의 특징정보
수동소나 시스템에서는 소음원에서 발생하는 신호의 주파수 성분을 특징 정보로 추출하여 사용한다. 앞서와 같이 선박에서 방사되는 소음은 소음의 발생 원인에 따라 다양하게 나타나고 그에 따른 주파수 성분도 다르게 나타난다. 기계류 소음은 선박의 추진 시스템, 동력 시스템 등 기계류의 동작으로 인해 발생되는 진동소음으로 선박에서 발생되는 소음의 주류를 이루며, 기계류 소음에 의한 주파수 성분은 저주파 대역에서 기본 주파수와 이의 고조파 주파수를 가지는 협대역 토널 성분으로 나타난다. 기계류 소음 중 동력 및 추진 시스템에 의한 소음은 선박의 기동과 관련이 있기 때문에 선박의 속도에 따라 주파수 성분이 변화하고, 그 외의 보조 장비의 경우 선박의 기동과 동작에는 연관이 없기 때문에 일정한 주파수 성분을 가지는 특성을 지닌다.
프로펠러 공동소음은 프로펠러 회전으로 인한 주파수 성분이 공동소음과의 상호 작용하여 발생한다. 공동소음은 많은 수의 무작위적인 기포들이 터지면서 발생하여 넓은 주파수에 걸친 광대역 스펙트럼으로 나타나는데, 스펙트럼은 피크 값을 중심으로 대략적으로 6 dB/oct 의 기울기를 가진다.[1] 스펙트럼의 피크값은 표적의 속도와 수심에 따라 달라지는데 속도가 빠를수록, 수심이 얕을수록 저주파 대역으로 이동하고 신호레벨이 커지는 형태로 나타난다. 이러한 공동소음은 프로펠러 소음과 상호작용하여 프로펠러 정보를 담고 있는 주파수 성분을 고주파 광대역으로 진폭 변조되어 나타나는데 DEMON 분석을 통해 저주파 토널 성분으로 표현된다. 유체 소음은 주로 변조되지 않은 광대역 스펙트럼 형태로 나타난다.
2.3 표적신호 모델링
앞서 언급한 다양한 소음들을 주파수 특성에 따라 분류하면 크게 협대역 소음과 광대역 소음으로 나눌 수 있다. 기계류 소음 및 프로펠러 소음의 토널 성분 등이 협대역 소음에 해당되며, 유체 소음은 광대역 소음이다. 이 중 광대역 소음은 배경잡음과 구분하기도 어렵고 특징적인 정보의 추출도 어려운 반면 토널 성분의 경우 주파수 성분과 같이 고유한 특징을 추출하기 쉽고 배경 잡음과도 구분하기 쉬우므로 표적인식 과정에서는 토널 성분의 주파수를 특징정보로 사용한다.
토널 성분중 기계류 성분은 다음과 같이 모델링 할 수 있다.[1,3]
 , (1)
, (1)
여기서  는 토널 성분의 개수,
는 토널 성분의 개수,  는 토널 신호의 세기,
는 토널 신호의 세기,  는 토널 주파수,
는 토널 주파수,  는 위상을 나타낸다.
는 위상을 나타낸다.
프로펠러의 정보를 담고 있는 토널 성분은 공동소음으로 진폭 변조된 형태로 나타나며 다음과 같이 나타낸다.
 , (2)
, (2)
여기서  는 하모닉 차수의 길이,
는 하모닉 차수의 길이,  는 변조 지수,
는 변조 지수,  는 기본 주파수,
는 기본 주파수,  는 위상,
는 위상,  는 공동소음을 의미한다. 기계류 토널 성분과 프로펠러 토널 성분을 합하면 특징 정보를 담고 있는 수동소나의 표적신호를 합성할 수 있다.
는 공동소음을 의미한다. 기계류 토널 성분과 프로펠러 토널 성분을 합하면 특징 정보를 담고 있는 수동소나의 표적신호를 합성할 수 있다.
III. ICA 모델 및 알고리즘
3.1 순시혼합모델
ICA는 확률 통계적 모델을 이용하여 혼합된 신호에서 원 신호를 찾는 기법이다. 순시혼합모델에서의 혼합신호는 원 신호의 선형조합 형태로 얻어진다. N개의 원 신호를  , M개의 관측 신호를
, M개의 관측 신호를  라고 하면 순시혼합모델은 다음과 같은 관계로 표현된다.
라고 하면 순시혼합모델은 다음과 같은 관계로 표현된다.
 , (3)
, (3)
여기서  는
는  의 혼합행렬 (mixing matrix)이다.
의 혼합행렬 (mixing matrix)이다.
ICA 알고리즘을 통해 얻어지는 분리된 신호
 는 다음과 같은 관계를 가진다.
는 다음과 같은 관계를 가진다.
 , (4)
, (4)
여기서  는
는  의 분리행렬(demixing matrix)이다. Eqs. (3)과 (4)에서 분리행렬
의 분리행렬(demixing matrix)이다. Eqs. (3)과 (4)에서 분리행렬  가 혼합행렬
가 혼합행렬  의 역행렬이 되면 분리된 신호
의 역행렬이 되면 분리된 신호  는 원 신호
는 원 신호  와 같아진다. ICA에서는
와 같아진다. ICA에서는  를 만족하는 분리행렬을 추정하는데, 추정하는 방법으로는 분리된 신호 상호간의 비 가우스성(non-Gaussianity)을 최대화 하거나 상호정보량을 최소화 하는 방법들이 사용되고 있다.[4]
를 만족하는 분리행렬을 추정하는데, 추정하는 방법으로는 분리된 신호 상호간의 비 가우스성(non-Gaussianity)을 최대화 하거나 상호정보량을 최소화 하는 방법들이 사용되고 있다.[4]
3.2 컨볼루션 혼합모델
순시혼합모델에서의 혼합신호는 원 신호들의 선형조합 형태로 나타난다. 하지만 실제 환경에서 센서를 통해 입력되는 혼합신호는 각각의 원 신호들과 시스템 사이의 컨볼루션 형태로 나타나는 경우가 대부분이다. Fig. 1과 같이 두 신호  를 두 개의 센서에서 관측하면 각 센서에서의 관측신호
를 두 개의 센서에서 관측하면 각 센서에서의 관측신호  는 Eq.(5)와 같이 표현할 수 있다. 여기서 *는 컨볼루션을 의미한다.
는 Eq.(5)와 같이 표현할 수 있다. 여기서 *는 컨볼루션을 의미한다.

 . (5)
. (5)
컨볼루션 혼합모델은 일반적으로 푸리에 변환을 하여 주파수 영역에서의 ICA, 즉, FDICA를 수행한다. 시간 영역에서의 컨볼루션은 주파수 영역에서 곱이 되어 순시혼합모델처럼 선형 조합의 형태가 되므로 FDICA는 각 주파수 빈 별로 순시혼합모델이 적용될 수 있다.
 . (6)
. (6)
FDICA에서는 ICA의 특징 중 하나인 모호성이 성능에 큰 영향을 미친다. ICA에서의 모호성이란 ICA 출력 신호의 크기와 순서는 원 신호의 크기 및 순서와 반드시 일치하지는 않는다는 것으로 각각 스케일 모호성, 치환 모호성 이라고 한다.
스케일 모호성이란 Eq.(4)의 분리행렬에 임의의 이득 값을 갖는 대각행렬이 곱해져도 ICA 알고리즘은 수렴하게 되면서 분리된 출력 신호의 크기가 임의로 달라질 수 있는 현상을 의미한다. ICA 과정에서 원 신호에 대한 정보는 없기 때문에 스케일 모호성은 완전히 해소될 수 없지만 최소왜곡정리(minimal distortion principle)를 이용하여 일정하게 보상하는 방법이 사용된다.[5]
치환 모호성이란 분리된 출력신호의 순서가 원 신호의 순서와 뒤바뀌어 나타나는 현상을 말하는데, 분리행렬의 행의 위치가 바뀌어도 ICA 알고리즘은 수렴하게 됨으로써 발생하는 문제이다. 치환 모호성은 FDICA에서 큰 문제가 되는데, 시간 영역에서는 단지 출력 신호의 순서만 바뀌지만 FDICA에서는 각 주파수 빈 별로 ICA를 수행함으로써 각 주파수 빈의 순서가 뒤섞이고 주파수 영역의 신호를 역 푸리에 변환하여 시간 영역으로 복원하였을 때 정보의 상실 및 왜곡을 초래한다. 따라서 FDICA에서 주파수 빈의 뒤섞임 현상을 해결하기 위한 많은 기법들이 연구되고 있는데, 독립벡터분석(Independent Vector Analysis, IVA)도 주파수 빈 뒤섞임 문제를 해결하기 위한 FDICA 기법 중의 하나이다.
IVA는 추정된 분리 신호의 주파수 빈 전체를 하나의 벡터로 간주하고 벡터의 확률 분포를 수퍼가우시안(super-Gaussian) 형태인 Laplacian으로 모델링하여 각 벡터 간의 상호정보량을 최소화 하는 방법으로 분리행렬을 구하게 된다. 이때 상호정보량을 최소화 하는 방식으로는 자연경사하강법(natural gradient algorithm)과 KLD(Kullback-Leibler Divergence) 척도가 사용된다.[5,6]
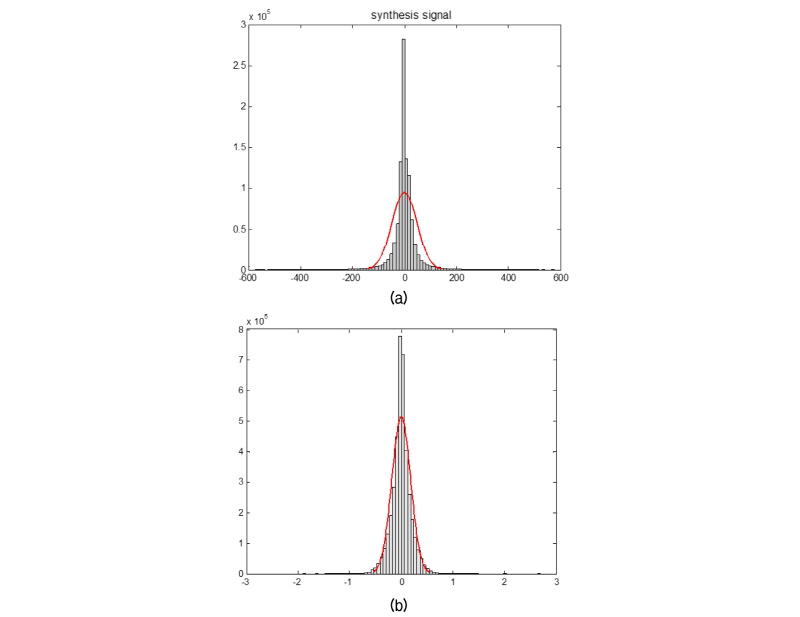
Fig. 2는 합성된 수동소나 혼합신호와 실제 수중환경에서 수집된 신호의 크기 분포에 대한 히스토그램과 대응되는 가우시안 곡선을 보인 것이다. 그림에서 보면 신호의 크기 분포가 수퍼 가우시안 형태에 더 가까움을 알 수 있으며, 따라서 FDICA 기법에서 IVA 알고리즘을 적용하는 것이 적합하다고 판단된다.
IV. 실험 및 검토
수동소나 시스템에서 ICA의 적용 가능성을 확인하기 위해 IVA 기법을 이용하여 2개의 표적이 혼합된 신호를 분리하는 모의실험을 수행하고, 그 결과를 분석하였다.
4.1 실험 조건
서로 다른 특징정보를 가지는 두 표적신호를 합성하였다. 표적 1은 50, 100, 150, 230 Hz의 기계류 토널 성분과 40, 80, 120 Hz의 프로펠러 성분을 가지도록 합성하였고, 표적 2는 30, 60, 90, 150 Hz의 기계류 토널 성분과 25, 50, 75 Hz의 프로펠러 성분을 가지도록 합성하였다. Eqs.(1)과 (2)에 사용된 파라미터들은 일정한 범위 내에서 무작위로 생성하였는데, 실험에 사용된 값은 Tables 1, 2에 나타내었다. 초기 위상  는 모두 0으로 설정하였다. 공동소음인
는 모두 0으로 설정하였다. 공동소음인  는 각각 220 Hz, 280 Hz에서 중심주파수를 가지고, 6 dB 기울기를 가지는 옥타브 필터로 모델링 하였다. 또한 두 공동소음의 크기는 50으로 하였다.
는 각각 220 Hz, 280 Hz에서 중심주파수를 가지고, 6 dB 기울기를 가지는 옥타브 필터로 모델링 하였다. 또한 두 공동소음의 크기는 50으로 하였다.
Table 1. Parameter values for signal generation (machinery components). | ||
Target 1 | Target 2 | |
| 5.33 | 4.58 |
| 4.80 | 4.12 |
| 4.27 | 3.66 |
| 5.00 | 3.20 |
| 50 Hz | 30 Hz |
| 100 Hz | 60 Hz |
| 150 Hz | 90 Hz |
| 230 Hz | 150 Hz |








Table 2. Parameter values for signal generation (propeller component). | ||
Target 1 | Target 2 | |
| 0.59 | 0.58 |
| 0.56 | 0.55 |
| 0.53 | 0.53 |
| 40 Hz | 25 Hz |
| 80 Hz | 50 Hz |
| 120 Hz | 75 Hz |






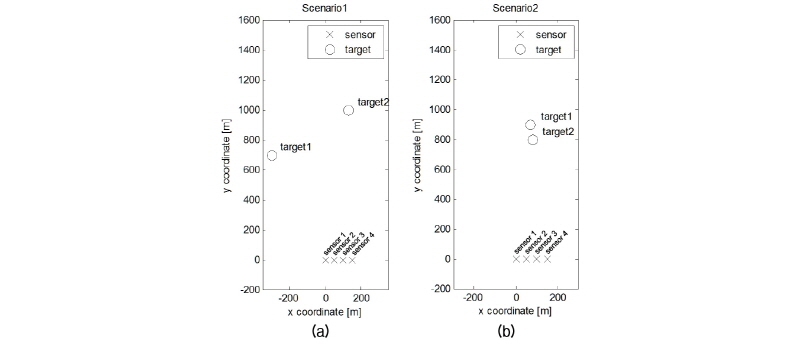
합성된 표적 신호를 가지고 Fig. 3과 같은 2가지 시나리오에 따라 혼합신호를 생성하였다. 각 시나리오에서는 4개의 센서로 2개의 표적을 탐지하는 상황으로 설정하였고, 표적간의 거리가 떨어져 있을 때와 표적간의 거리가 인접한 경우에 대해서 신호를 혼합하였다. 표적과 센서 사이의 위치에 따른 신호 크기 감쇠 및 지연 시간을 고려하여 혼합신호를 합성하였으며, 표적의 움직임이나 잔향에 대해서는 고려하지 않았다. 각 시나리오에 따른 표적과 센서의 위치 정보는 Table 3에 주어져 있다.
4.2 모의실험
각 시나리오에서 분리하기 전 센서에서 관측되는 신호와 IVA를 통해 분리한 후의 결과를 비교하였다. 분리된 신호의 분석은 수동소나 신호처리에 사용되는 LOFAR, DEMON 분석을 통해 특징정보인 주파수 토널 성분의 분리 결과로 확인하였다. 합성 신호의 샘플링 주파수는 10 kHz로 하였고, IVA에서 사용되는 단시간 푸리에 변환(short time Fourier transform)의 창 크기는 500 샘플 , 75 % 오버랩으로 설정하였다.
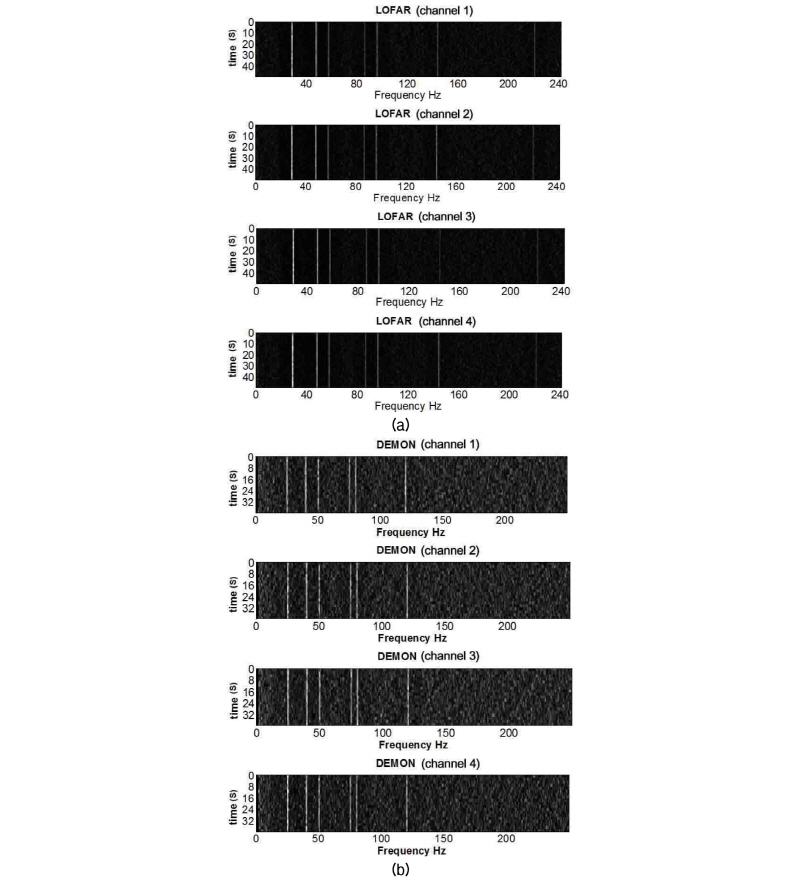
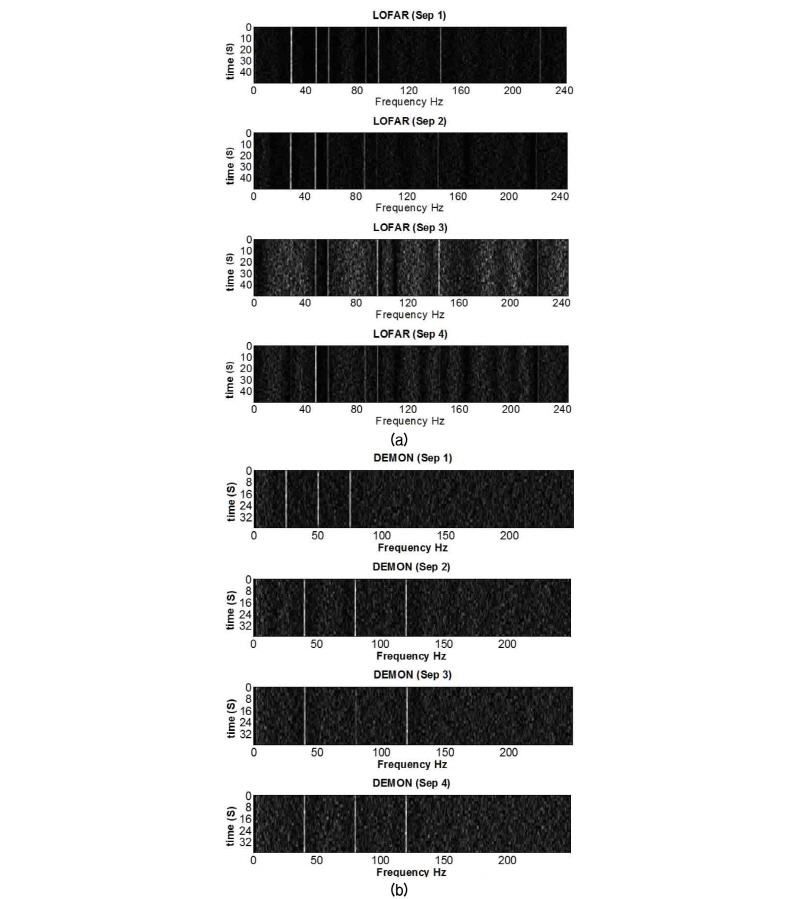
Fig. 4는 ICA 알고리즘을 통해 신호를 분리하기 전의 관측신호에 대한 LOFAR 와 DEMON 분석 결과를 보인 것이다. LOFAR 의 전시화면에서는 표적 1,2의 기계류 토널 성분이 같이 관측되고 DEMON 전시화면에서는 표적 1,2의 프로펠러 성분이 혼재되어 나타남을 볼 수 있다. Fig. 5는 분리 후의 결과를 나타낸 것이다. LOFAR 전시화면에서는 신호의 분리가 제대로 이루어지지 않아 각 표적의 성분이 뚜렷하게 나타나지 않았으며, DEMON 전시 화면에서는 각 표적에 대한 프로펠러 성분이 분리가 되어 나타남을 확인하였다. 첫 번 째 출력신호는 표적 2의 프로펠러 성분, 두 번 째부터 네 번째까지의 출력신호는 표적 1의 프로펠러 성분으로 분리가 되었다.
|
Fig. 6. LOFAR & DEMON of observed signals (scenario 2). |
|
Fig. 7. DEMON of separated signals (scenario 2). |
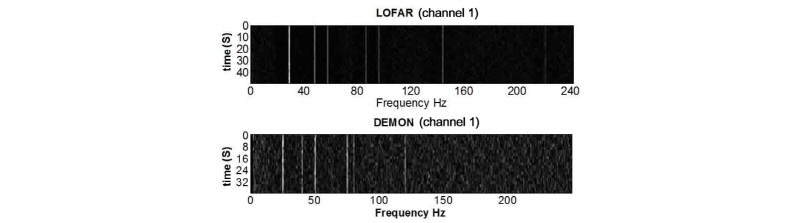
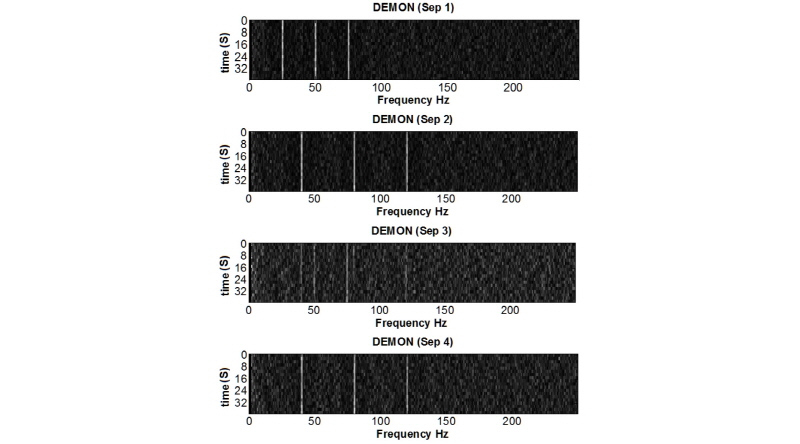
시나리오 2는 시나리오 1과 같은 조건에서 표적의 위치를 바꾸어 표적이 존재하는 방위가 거의 같을 때의 상황을 구성하였다. 분리 전 관측 신호 중 하나의 LOFAR, DEMON을 Fig. 6에 나타내었는데, 시나리오 1에서와 같이 표적 1,2 의 성분이 혼재되어 나타났다. 분리 후의 결과에서는 시나리오 1과 마찬가지로 LOFAR로 관측한 저주파 대역의 토널 성분은 분리가 잘 되지 않았지만 Fig. 7에서와 같이 DEMON 분석에 의한 프로펠러 성분은 분리가 됨을 확인할 수 있었다.
V. 결 론
수동소나의 표적신호를 합성하고 FDICA 기법인 IVA를 이용하여 수동소나 환경에서 표적 분리를 위한 FDICA 기법의 적용 가능성에 대해 연구하였다. 모의실험을 통해 인접한 방위에 존재하는 두 표적의 혼합신호에 IVA 기법을 적용하여 토널 성분을 분리함으로써 2개 표적의 식별이 가능함을 보였다. 특히 DEMON 분석을 통해 관측할 수 있는 프로펠러 성분이 잘 분리되는 경향을 보였는데, 추후 LOFAR 관측 환경에서도 잘 동작하는 신호 분리에 관한 연구가 필요하다고 생각된다.
현재 ICA 알고리즘은 음성, 음향신호처리 분야에서 주로 연구되고 있으며 사용되는 함수나 파라미터의 경우에도 음성신호에 맞추어서 연구되고 있다. 향후 수중환경에서 수집한 수동소나 신호를 이용하여 실제 환경에서 수동소나 시스템에 적합한 FDICA 알고리즘을 개발하는 연구가 필요하다고 생각되며, 앞으로의 지속적인 연구를 통해 빔형성 기법으로는 어려운 동일 방위의 표적신호 분리와 연안감시시스템에서의 표적 식별 등에 활용될 수 있을 것으로 기대된다.
