I. 서 론
II. 시역전의 이론
2.1 능동형 시역전의 검토
2.2 수동형 시역전의 이론
III. 시역전 탐지의 개념
IV. 거리종속 수동형 시역전 모델링과 수중탐지 응용
4.1 채널 충격응답 측정과정
4.2 표적 부재 시 전파과정
4.3 표적 존재 시 전파과정
4.4 표적 부재 시와 존재 시의 비교
V. 결 론
I. 서 론
수중탐지 대상의 저소음화 문제를 극복하기 위해 배열이득(array gain)을 향상시킨 수동소나와 적극적 개념의 능동소나가 이용된다. 수동소나에서 배열이득을 높이려면 센서배열의 길이가 증가하며, 능동소나는 해양환경의 경계면과 매질의 비균질성 등에 의해 발생하는 잔향음이 표적신호와 함께 수신되어 수중 탐지에서 어려움을 발생시킨다.
최근 능동소나와 수동소나의 장점을 활용한 시역전 기술이 연구되고 있으며, 다수의 연구 성과와 응용 결과를 도출하고 있다.[1,2] 수동과 능동의 개념을 복합적으로 이용하면서 음향물리학적으로 극복하기 어려운 수중에서의 음파전달현상을 역이용하는 방법이 시역전 기술이다. 시역전 기술은 음파의 전달매질인 수중음향환경 자체를 자기등화기(self-equalizer)로 이용하는 기술로, 공간상의 어느 점에서 방사된 약한 신호를 수신하여 시간 축에서 뒤집어 증폭하여 보내면 신호가 원래의 지점에 정확하게 다시 집속(focusing)되는 현상을 이용한다.[3]
해양에서의 시역전 기술은 1990년대 중반 Kuperman과 Hodgkiss에 의해 해상실험을 통해 검증되었으며, 소나 및 수중통신 분야에 대한 응용 가능성이 제기되었다.[4] 또한 미국 스크립스 해양연구소와 NATO SACLANT 수중연구센터가 주관하여 3.5 kHz 대역에서 능동형 시역전을 이용한 음향장벽 실험이 수행되어 수중탐지의 가능성을 입증하였으며,[2] Tesei 등은 고주파수 능동형 시역전에 의한 수중음향장벽의 모델링과 수중탐지에의 응용에 관한 연구결과를 도출하고 있다.[5,6] 수동형 시역전의 응용연구는 수중통신 분야에서 이론적 연구와 실험이 이루어지고 있다.[7,10]
본 논문에서는 수동형 해양 시역전에 의한 수중탐지의 개념과 이론을 수립하였다. 또한 수중음향장벽의 모델링의 현실화에 있어 천해 근거리 수중 물체 탐지에 고 주파수(수 kHz 대역) 활용과 실제 해양 음향환경과 유사한 거리종속 개념 도입하여, 수동형 시역전 수중음향장벽 모델링을 통해 수중탐지 문제에 응용하였다.
본 논문의 구성은 다음과 같다. II 장에서는 능동형 시역전 이론에 대해서 검토하고, 수중탐지 문제에 있어 수동형 시역전 이론에 대해서 설명한다. III 장에서는 시역전을 이용한 수중탐지의 개념 및 원리를 정립하며, IV 장에서는 거리종속 수동형 시역전 모델링을 통해 수중탐지에서 수동형 시역전을 이용한 수중음향장벽을 구현하도록 한다.
II. 시역전의 이론
2.1 능동형 시역전의 검토
능동형 시역전은 공간상의 임의의 위치에서 방사된 신호를 임의의 위치의 송수신기배열(Transmitter- Receiver Array, TRA)에서 수신하고, 시간 축에서 뒤집어 신호를 증폭하여 수신된 위치에서 다시 송신하면 신호원의 위치로 다시 집속하는 원리를 이용한다. 주파수영역에서 집속 음장(focused field)을 수식적으로 표현하면 다음과 같다.[8,9]
| (1) |
여기에서 S(ω)는 탐침음원 신호의 스펙트럼이고, ()*와 ()+는 각각 공액복소수(complex conjugation)와 공액전치(Hermitian transpose)이다. ![]() 는 탐침음원의 위치
는 탐침음원의 위치 ![]() 로부터 TRA의 j번째 소자 위치
로부터 TRA의 j번째 소자 위치 ![]() 에서의 전달함수를 나타내며,
에서의 전달함수를 나타내며, ![]() 는 TRA의 j번째 소자 위치
는 TRA의 j번째 소자 위치 ![]() 로부터 임의의 위치
로부터 임의의 위치 ![]() 로의 전달함수이다. 그리고 N는 TRA 소자의 총 개수이며, G와 rarray는 (N×1)의 열벡터이다.
로의 전달함수이다. 그리고 N는 TRA 소자의 총 개수이며, G와 rarray는 (N×1)의 열벡터이다.
|
그림 1. 능동형 시역전을 위한 시스템 모델 Fig. 1. System model for active time reversal. |
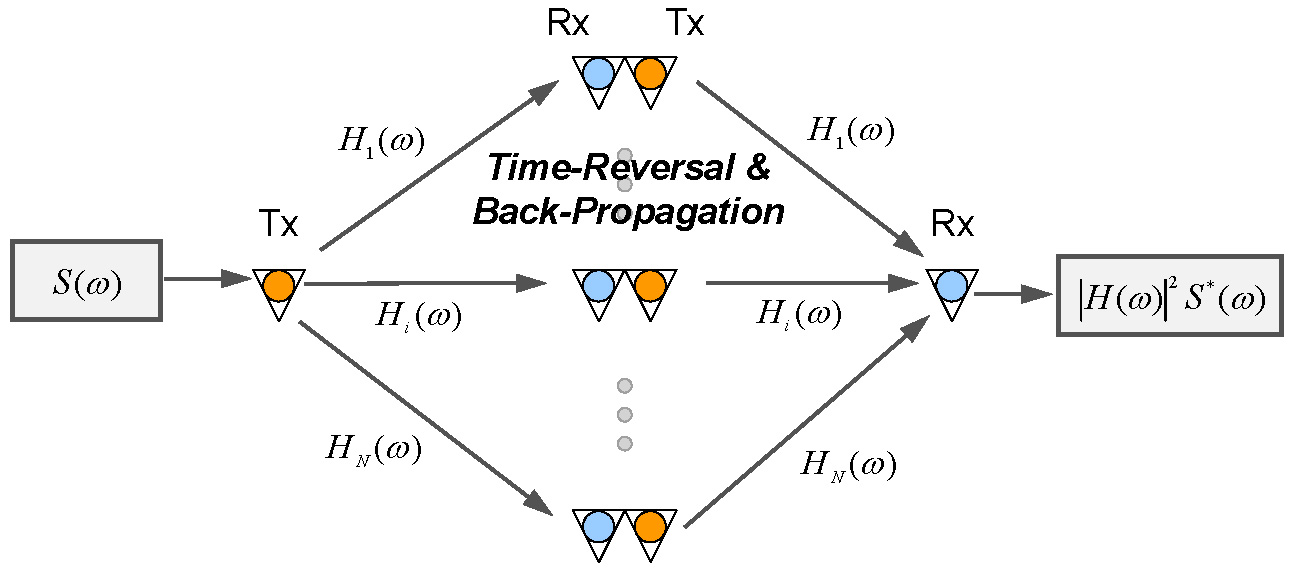
2.2 수동형 시역전의 이론
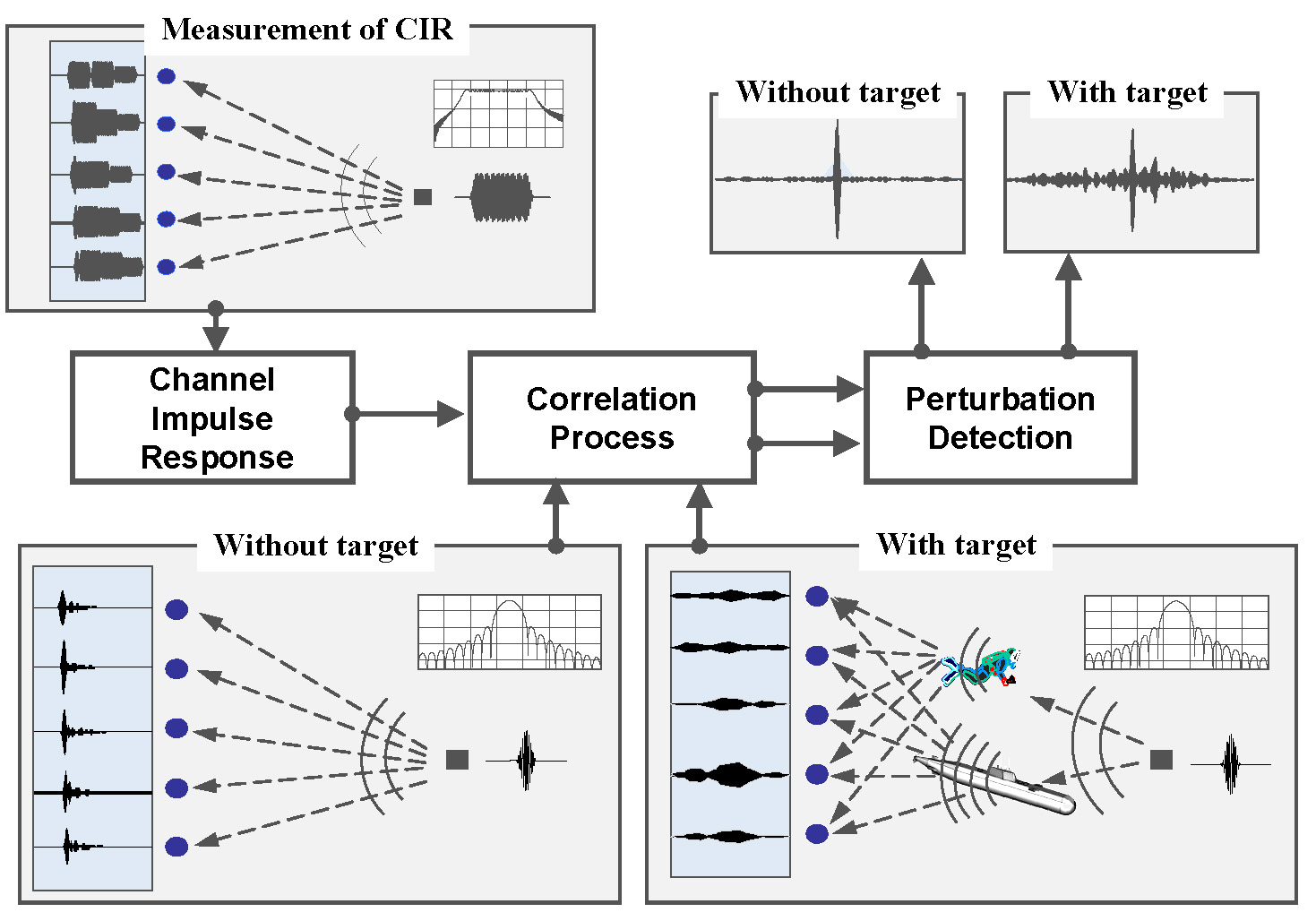
능동형 시역전은 양방향 전파과정을 통해 능동적으로 채널응답의 시공간 정합필터(matched filter)를 구현하는 것으로 볼 수 있는 반면, 수동형 시역전은 한쪽 방향 전파과정을 통해 수신기 배열단에서 시공간 정합필터를 수치적으로 계산한다.
해양 도파관에서 기지의 신호 s(t)가 탐침음원(probe source)로부터 전파될 때, 수신기 배열의 i번째 수신기는 ri(t) = s(t)⊗hi(t)를 수신한다(그림 2). 여기서 hi(t)는 해양 도파관의 채널 충격응답(impulse response), ⊗는 convolution을 표시한다. 능동형 시역전이 수신신호의 시역전 버전인 ri(-t)를 재전송하는 반면, 수동형 시역전은 각 수신기에 hi(-t)의 정합필터링을 수행하여 전 수신신호를 더한 것과 같다.[10]
|
그림 2. 수동형 시역전을 위한 시스템 모델 Fig. 2. System model for passive time reversal. |
| (2) |
여기에서 M은 수신기의 수이며, q(t)는 각 채널 충격응답의 autocorrelation의 합을 표현한다.[11] 본질적으로 y(t)는 능동형 시역전의 탐침음원 위치에서 수신된 집속신호와 같다.
그림 2에서와 같이 주파수 영역에서 정합필터 Hi*(ω)는 채널 탐침신호 Scp(ω)에 의해 채널 응답 Hi(ω)를 계산함으로 추정할 수 있다. 일반적으로 채널 탐침신호는 표적 탐침신호의 대역폭을 충분히 고려한 LFM(Linear Frequency Modulation) chirp가 사용된다. 이 경우에, de-convolution 필터로서 Ricp(ω)/Scp(ω)를 사용하여 채널 응답을 획득할 수 있고, 동시에 펄스압축과 채널 정합필터링을 수행할 수 있다.
수중탐지 문제에 있어 시역전의 활용은 능동형과 수동형 시역전에 관계없이 식(2)의 q함수의 거동에 의존한다. 완벽한 형태의 q함수는 delta 함수이나, 주어진 수신기 배열을 이용하여 해양 도파관의 모든 전파경로를 획득하는 것은 불가능함으로 q함수는 일반적으로 근사 delta 함수이다.
III. 시역전 탐지의 개념
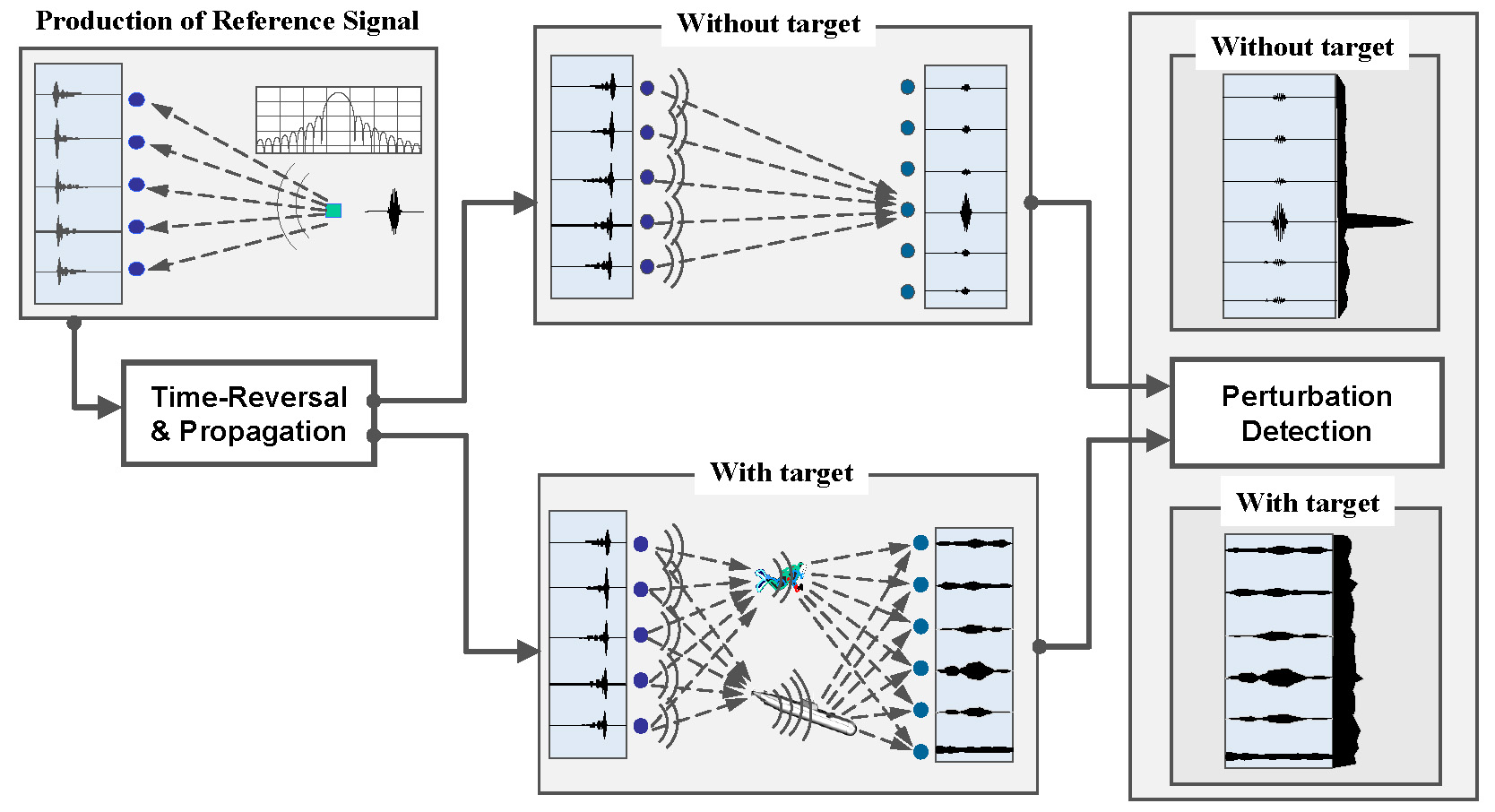
수중탐지에 있어 시역전 수행이 관심을 끌게 된 이유는 전통적인 순방향 산란(forward scatter) 음향장벽이 수신기에서 표적에 입사한 음파의 순방향 산란된 에너지를 탐지하기 때문에 시역전의 개념을 쉽게 적용할 수 있다는 것이다. 시역전 개념을 사용하여 수신기 방향으로 신호를 송신하여 음파를 집속시키는 과정에서 전파매질에 교란을 유발하는 산란체가 개입하게 되면 집속은 시간과 공간상에서 탈선현상을 보이며, 이것을 탐지하는 것이 시역전을 이용한 수중음향장벽의 탐지 개념이다.
능동형 시역전 탐지가 단상태(monostatic) 능동소나 탐지와 다른 점은 단상태 능동소나에 의한 탐지는 탐침용 송신음향센서에서 송신된 신호가 표적에 맞고 반사 및 산란된 신호를 수신하여 탐지하기 때문에 반사/산란 신호의 크기로 표적의 존재 유무를 판단하여야 하지만, 시역전 탐지는 표적이 없을 때 탐침용 송신음향센서에서 송신된 신호를 송수신음향센서배열에서 수신하여 이 신호를 기준 신호로 삼는다는 것이다. 송수신음향센서배열에서 기준신호들을 시역전 즉, 시간상에서 뒤집어 송수신음향센서배열에서 송신하면 탐침용 송신음향센서의 위치에 공간적으로 집속(focusing)이 발생하며, 시간상으로는 송수신음향센서배열에서 수신되었던 복잡한 신호가 펄스 압축되어 탐침용 송신음향센서에서 송신한 신호와 거의 유사하게 수신된다(그림 3).
위에서 알 수 있듯이 시역전의 원리는 능동소나와 수동소나를 복합한 개념이다. 만약 표적이 탐침용 송신음향센서와 송수신음향센서배열 사이에 존재하게 된다면 송수신음향센서배열로부터 송신된 기준신호들은 탐침용 송신음향센서 위치에서 공간적 집속과 시간적 펄스 압축 현상이 깨질 것이다. 따라서 시역전에 의한 탐지개념은 표적의 존재 유무에 따라 차별화되어 수신되는 신호를 구별하는 것으로 이 과정에서 잔향음과 같은 방해요소가 포함되지 않음으로 견실한 탐지가 가능하다.
|
(a) |
|
(b) |
그림 3.시역전 탐지의 실연 과정(a) 능동형 시역전 탐지, (b) 수동형 시역전 탐지 Fig. 3.Demonstration for time-reversal detection.(a) active time-reversal detection, (b) passive time-reversal detection. |
IV. 거리종속 수동형 시역전 모델링과 수중탐지 응용
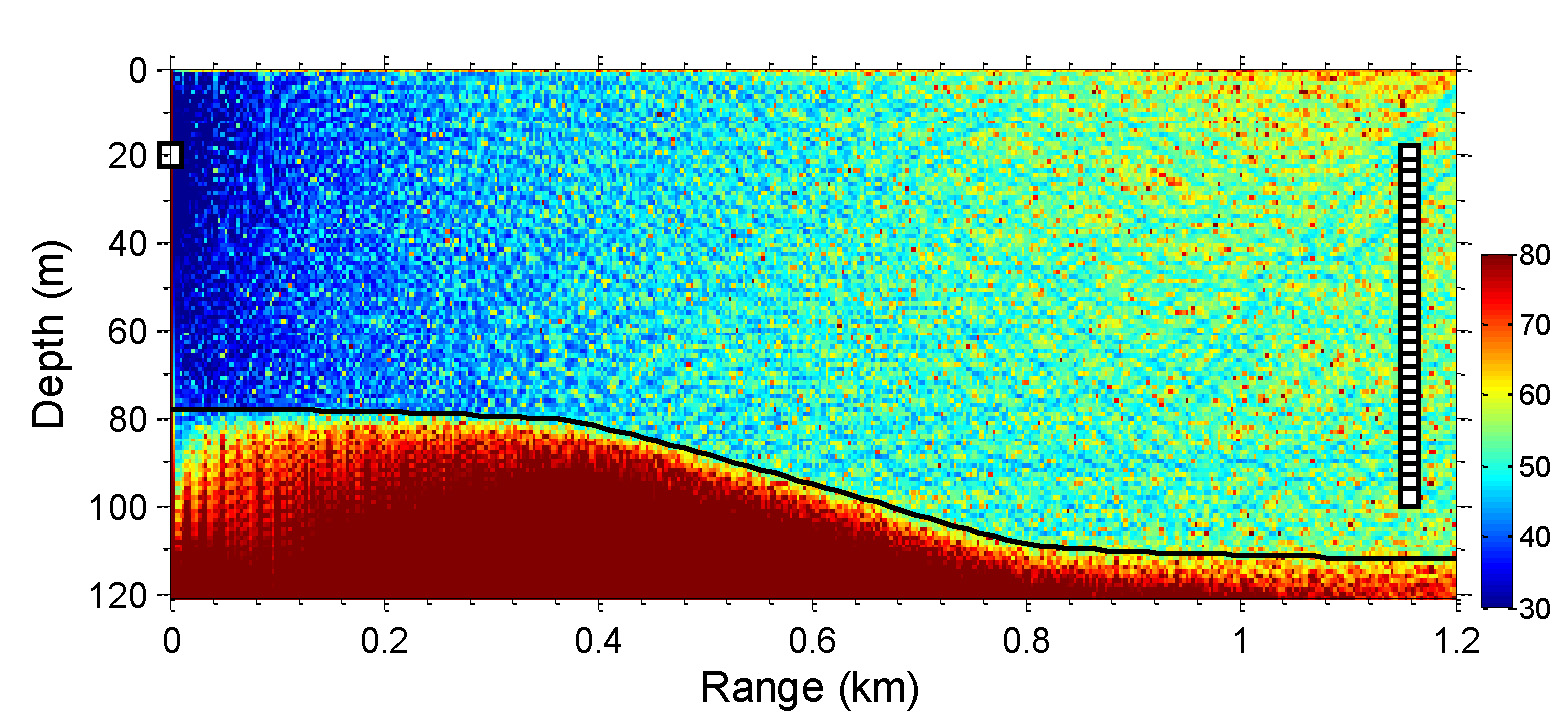
수동형 시역전 수중음향장벽의 모델링을 위한 시나리오는 그림 4와 같다. 수심은 거리에 따라 78 m ~ 112 m 사이에서 가변하며, 음속 프로파일 또한 하향굴절 음향전파환경이다(그림 5). 탐침음원의 수심의 20 m이며, 탐침음원으로부터 1,156 m 떨어진 원격지에 수신기 배열(Receive Array, RA)을 설치하였다. RA는 수심 20 m에서 98까지 등 간격으로 29개 송수신기가 설치된 구조이다.
|
그림 4.수동형 시역전 수중음향장벽을 위한 시나리오 Fig. 4.A scenario for underwater acoustic barrier with passive time reversal. |
|
그림 5. 주파수 3.5 kHz에서의 전달손실 음장 Fig. 5. Transmission loss field at 3.5 kHz. |
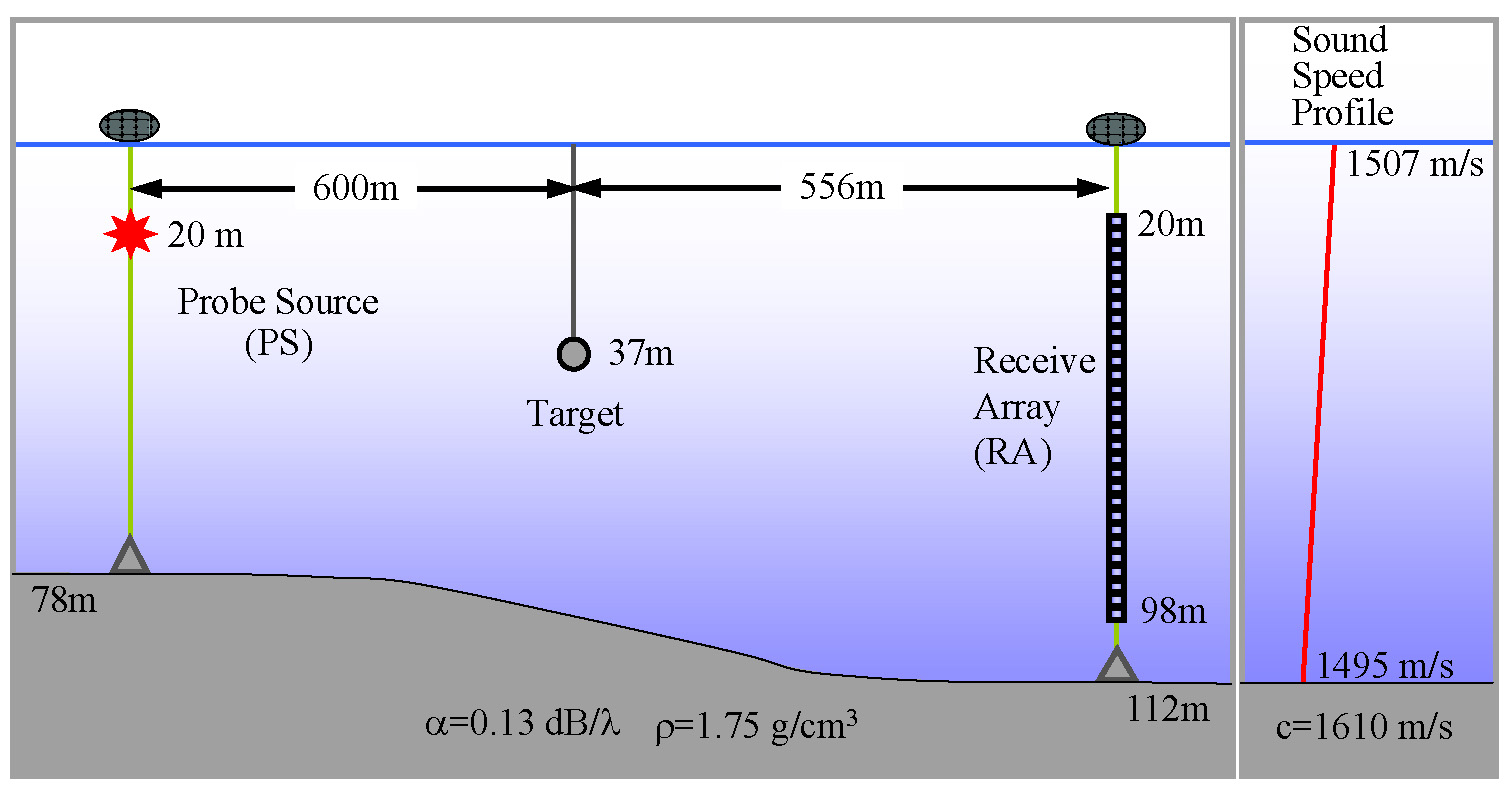
표적은 RA로부터 556 m 떨어져 있으며, 대략 60 m × 5 m 크기의 수중 물체를 가정하여 전방 표적강도(forward-scatter target strength) 60 dB를 갖는 점 음원(point source)으로 가정하였다.[2,5]
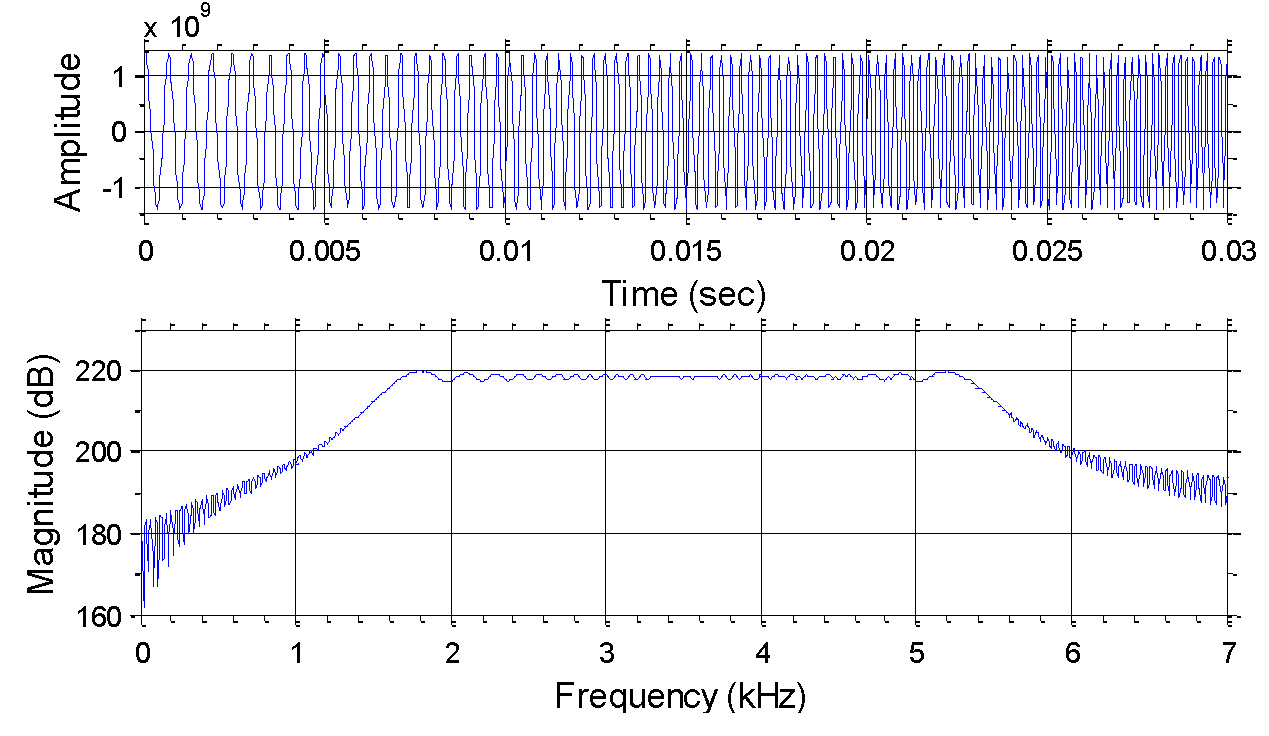
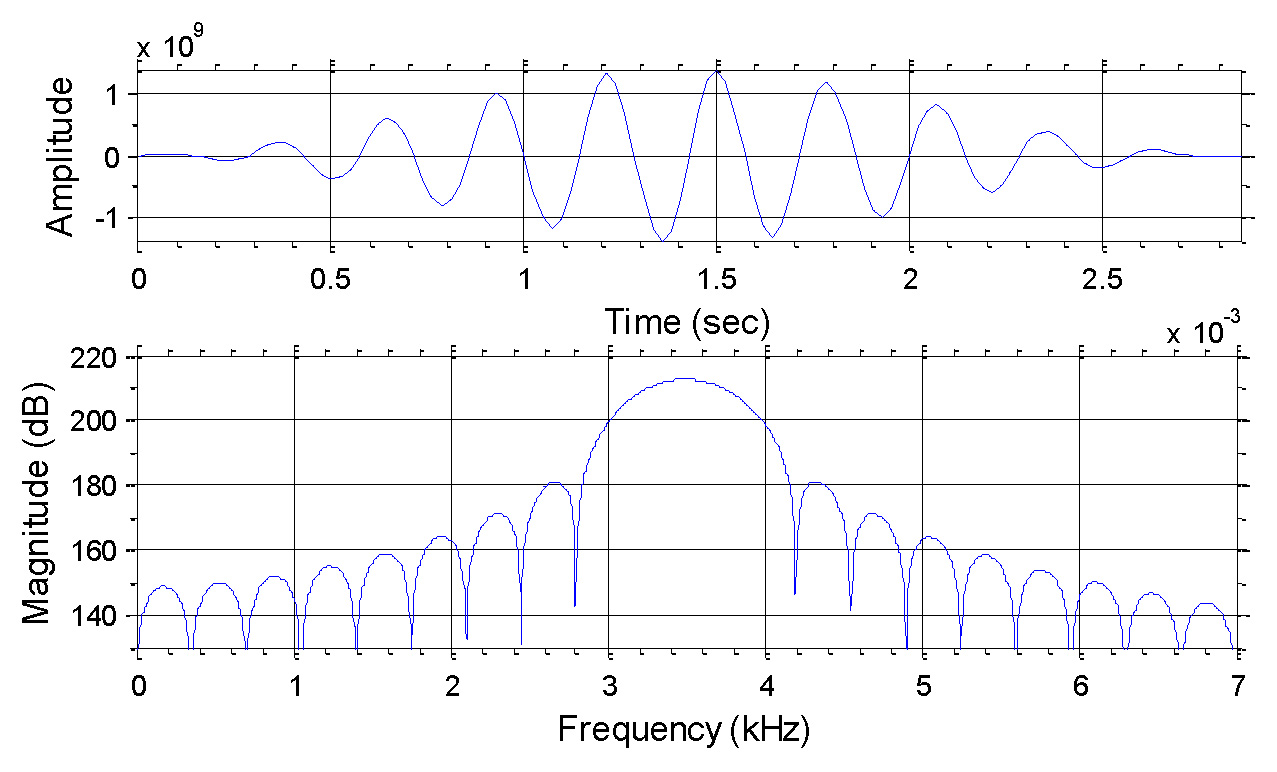
채널 충격응답을 측정하기 위한 채널 탐침신호는 표적 탐지용 탐침신호의 주파수 대역폭을 충분히 고려하여 선택하며, 주파수 대역 1.5 kHz ~ 5.5 kHz를 갖는, 펄스길이 30 ms의 LFM 신호를 사용하였다(그림 6). 표적 탐지용 탐침신호로는 중심주파수 3.5 kH, 3 dB 대역폭 1 kHz이며, 펄스길이 2.86 ms의 Hanning 창함수 형태의 펄스를 사용하였다(그림 7). 채널 탐침신호는 표적 탐지용 탐침신호의 주파수 대역폭을 충분히 포함하는 주파수 대역폭을 가져야 한다.
|
그림 6.채널 충격응답을 측정하기 위한 채널 탐침신호 Fig. 6.Time series and its spectrum of the channel probing source signal. |
|
그림 7.표적 탐지용 탐침신호 Fig. 7.Time series and its spectrum of the detecting probe source signal. |
4.1 채널 충격응답 측정과정
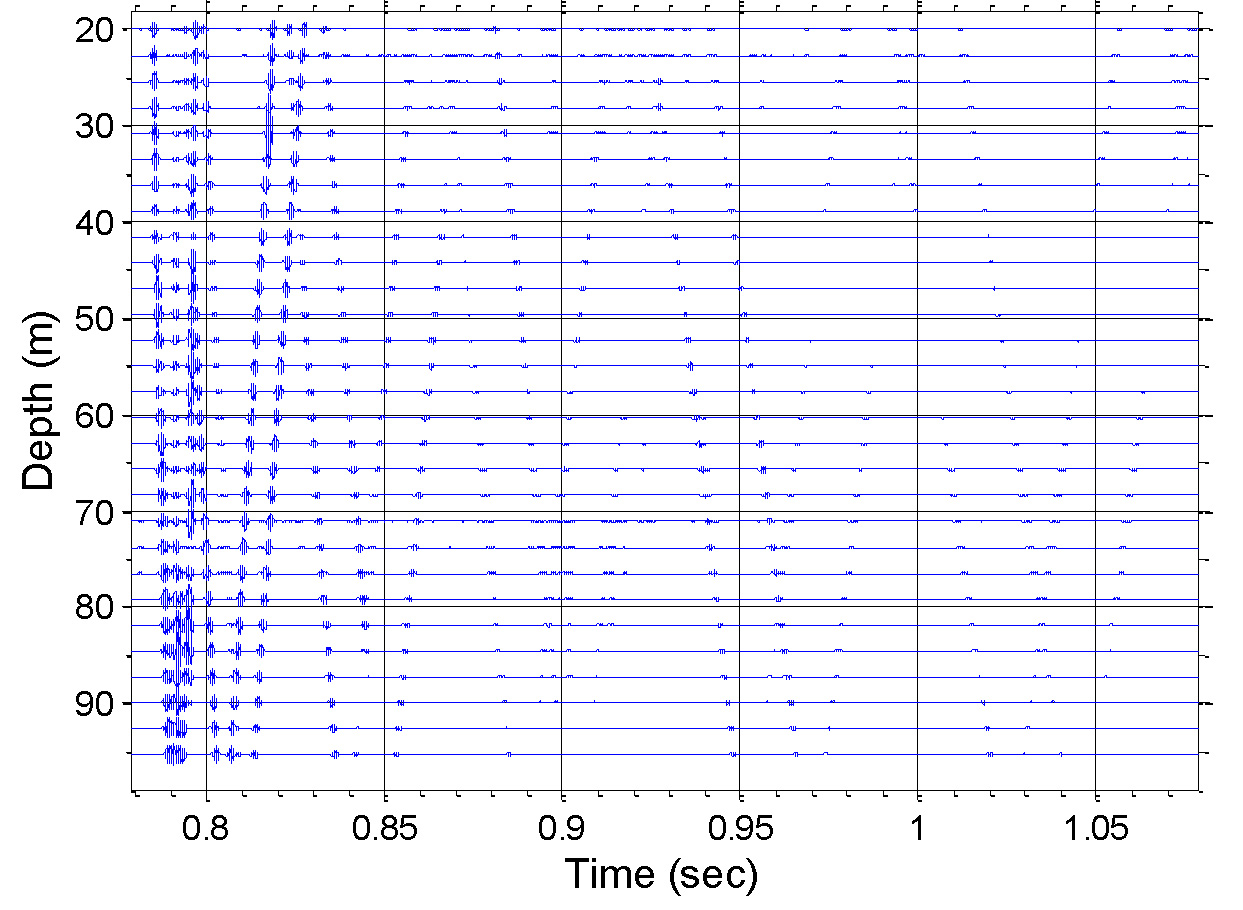
수동형 시역전 수중음향장벽의 모델링의 첫 단계는 채널의 충격응답을 측정하는 과정(그림 8)으로 탐침음원에서 채널 탐침신호 를 송신하여 RA에서 신호를 수신하며(그림 9), 이 과정에서 표적은 존재하지 않는 것으로 가정한다. 채널의 충격응답은 RA에서 수신된 신호와 채널 탐침신호를 de-convolution 처리를 수행하여 획득하게 된다(그림 10).
|
그림 8.채널 충격응답 측정을 위한 시스템 모델 Fig. 8.System model for measuring channel impulse response. |
|
그림 9.채널 탐침신호의 RA에서의 수심 별 수신신호 Fig. 9.Depth-stacked time series received from channel probing source signal. |
|
그림 10.RA에서의 수심 별 채널의 충격응답 Fig. 10.Depth-stacked channel impulse response at receiver array. |
4.2 표적 부재 시 전파과정
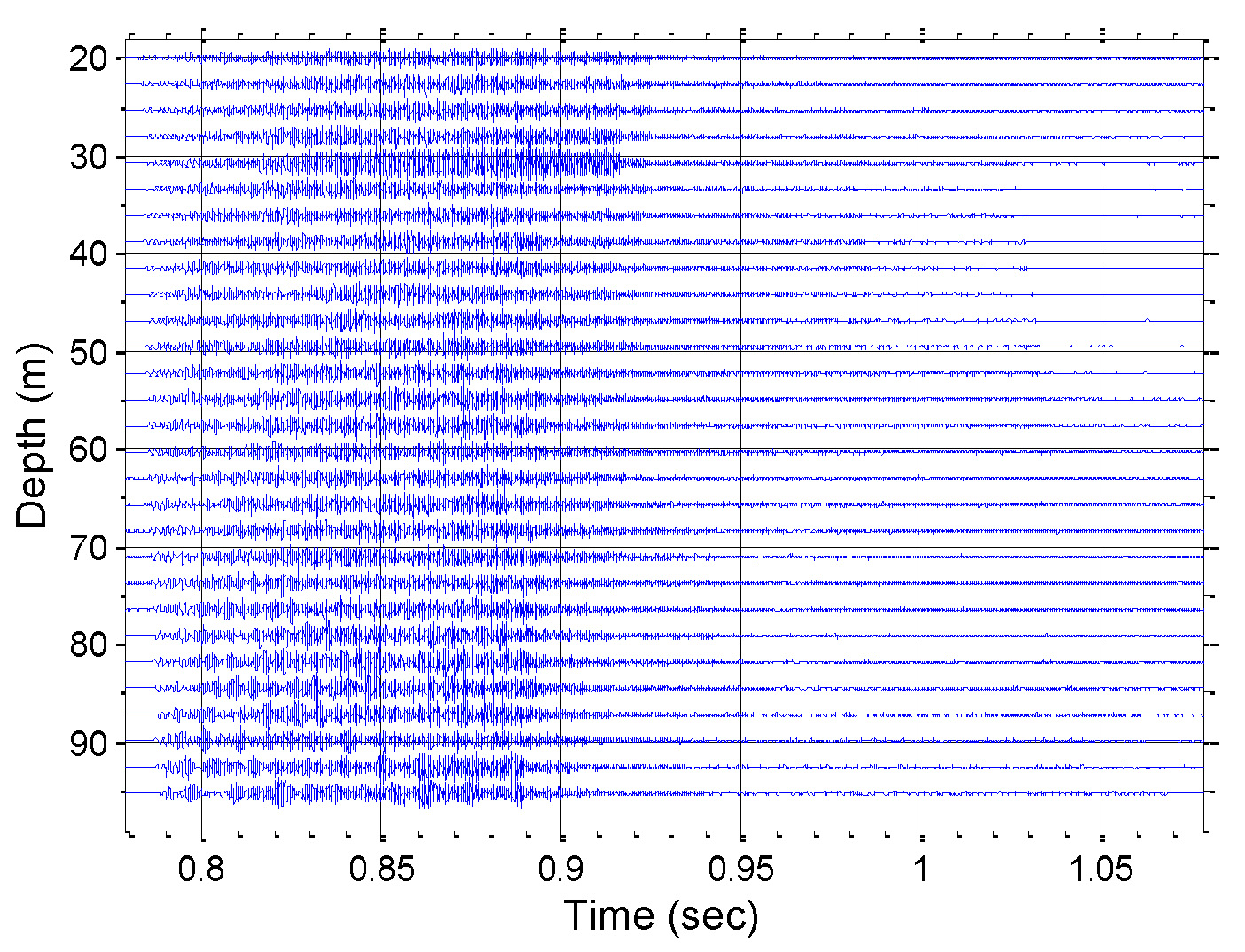
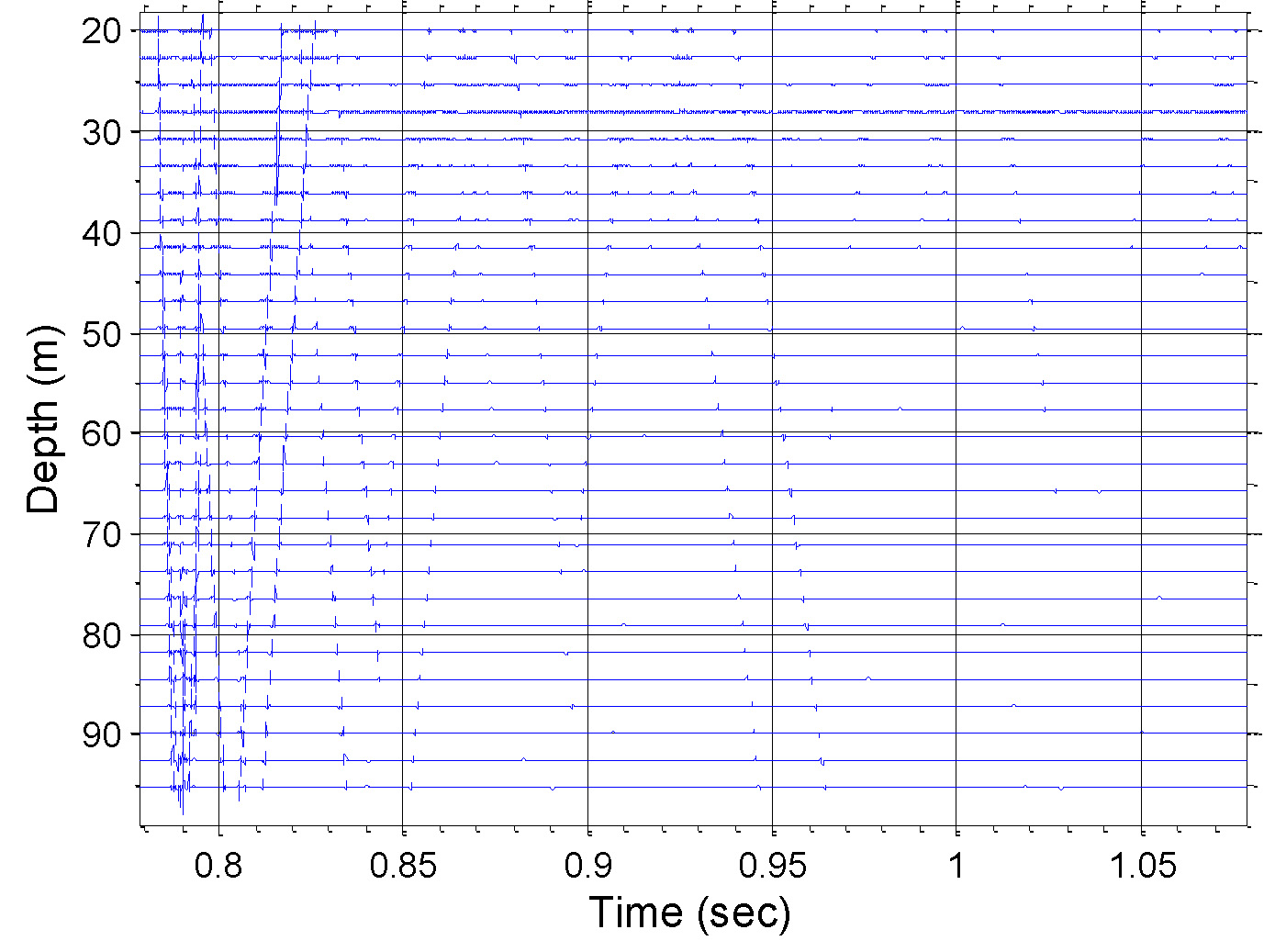
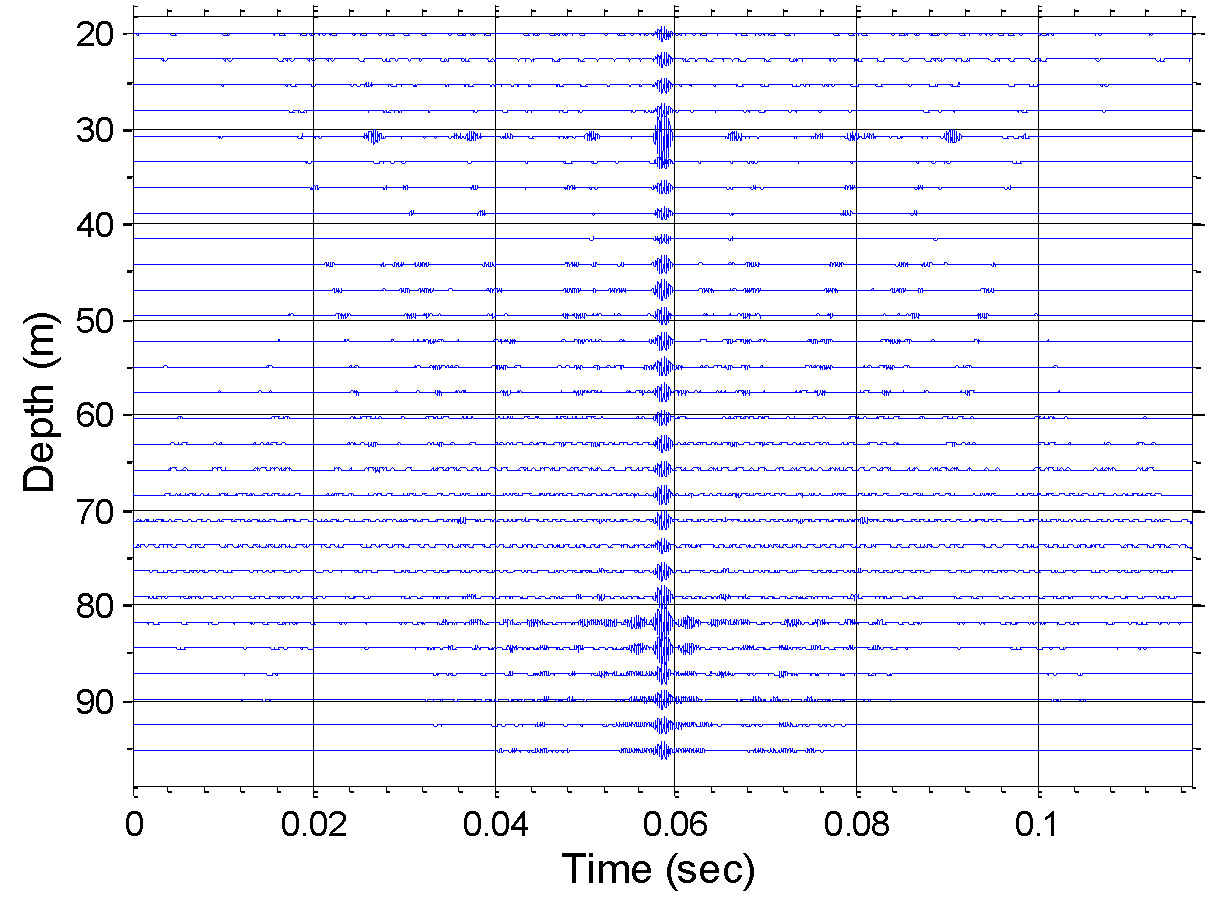
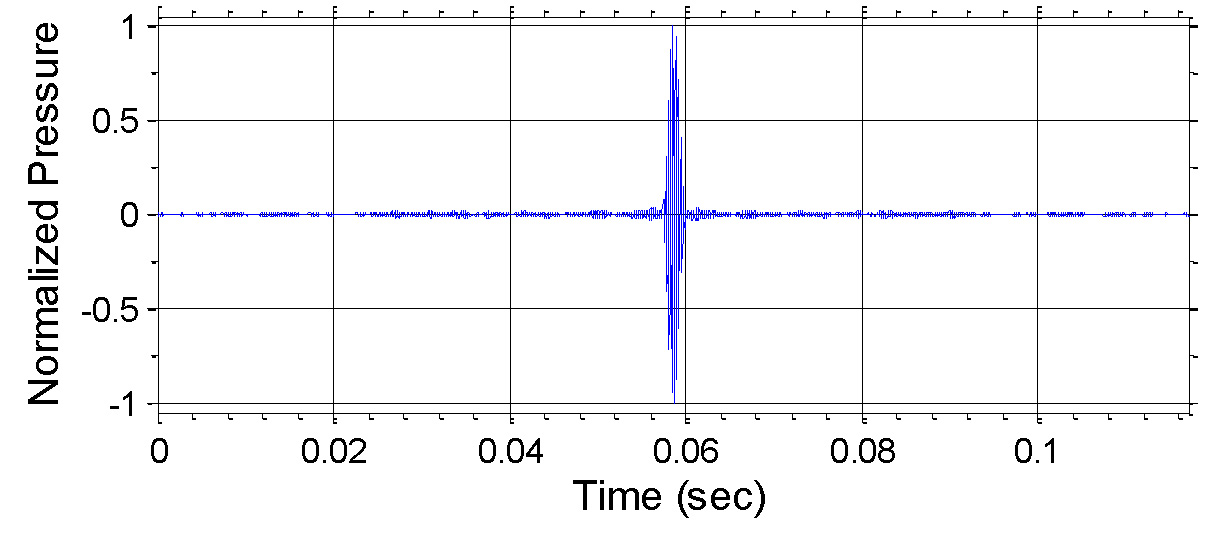
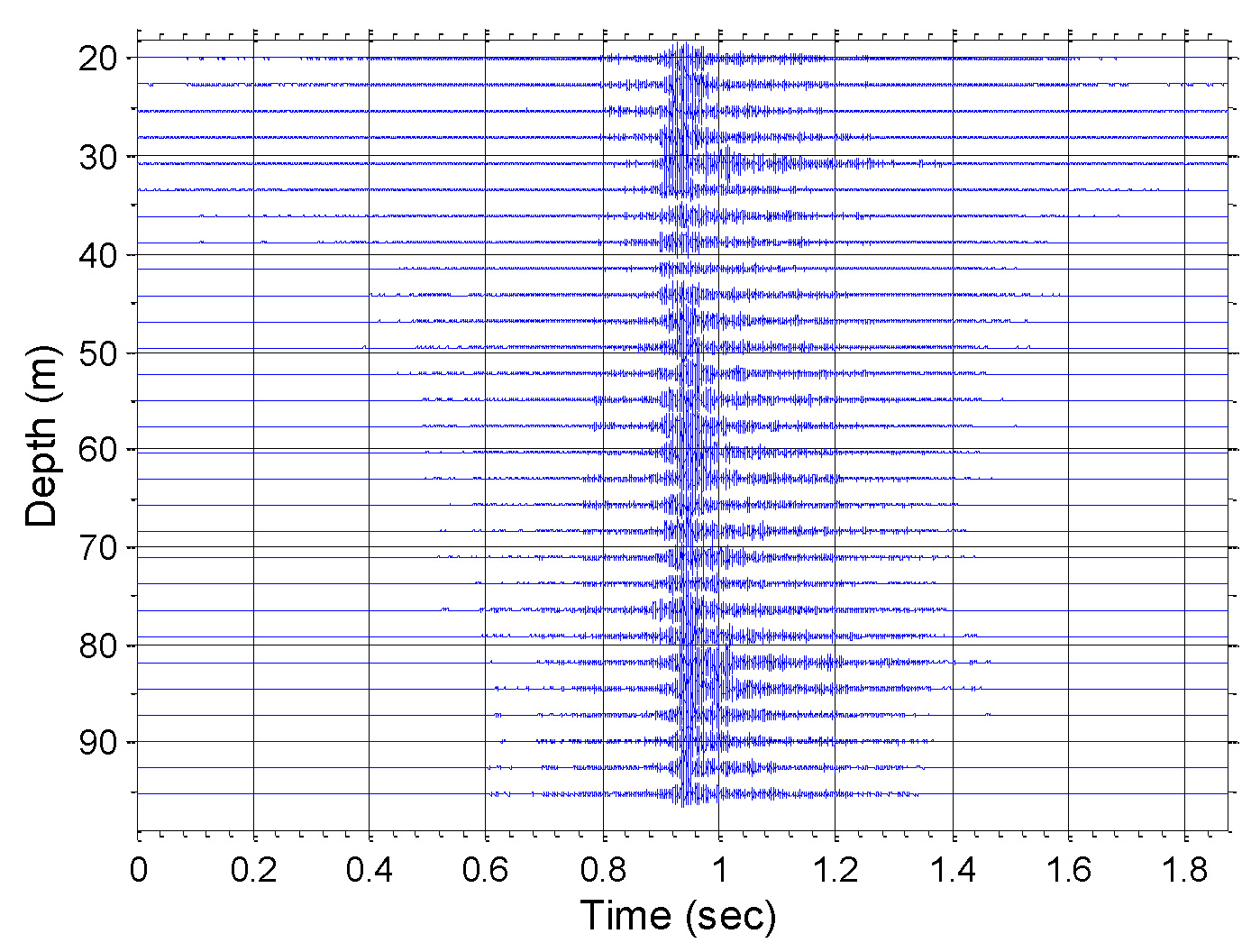
표적이 부재 시 교란이 없는 음장을 측정하는 과정이다(그림 11). 그림 12는 RA에서 수신한 수심 별 신호로 다중경로에 신호 도달구조를 확인할 수 있다. 그림 13은 그림 12의 신호와 그림 10의 채널 충격응답을 통해 가상의 시역전 전파를 수행한 것으로 탐침음원의 위치에서 집속(focusing)이 수심 별로 발생하고 있다. 이 수심 별 집속신호를 더하면 그림 14의 최종적인 결과를 모델링 할 수 있다.
4.3 표적 존재 시 전파과정
표적 존재 시 표적에 의한 교란 음장을 측정하는 과정이다(그림 15). 전파의 과정은 해양 도파관에 표적이 존재하는 것만 제외하고 표적 부재 시와 같다. 그림 16은 RA에서 수신한 수심 별 신호로 그림 12와 달리 명확한 다중경로는 더 이상 확인할 수 없다.
|
Fig. 15.System model for propagation process with target. |
|
그림 16.표적 존재 시 표적 탐지용 탐침신호의 수심 별 수신신호 Fig. 16.Depth-stacked time series received from channel probing source signal with target. |
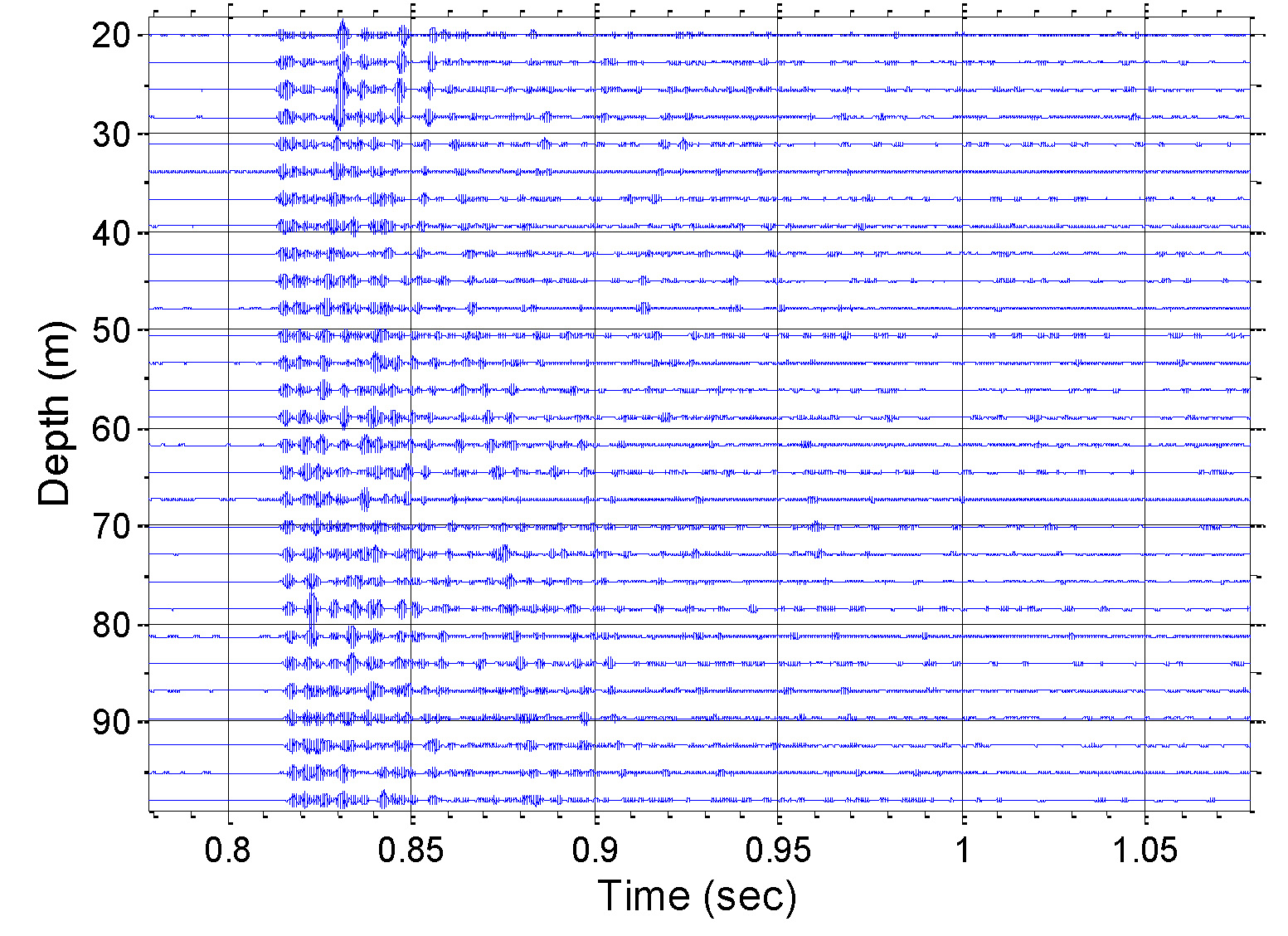
그림 17은 그림 16의 신호와 그림 10의 채널 충격응답을 통해 가상의 시역전 전파를 수행한 것으로 표적 존재에 의한 음장의 교란으로 탐침음원의 위치에서 집속하지 않는다. 수심 별 신호를 더하면 그림 18의 표적 존재 시 교란 음장에 의한 최종적인 결과를 모델링 할 수 있다.
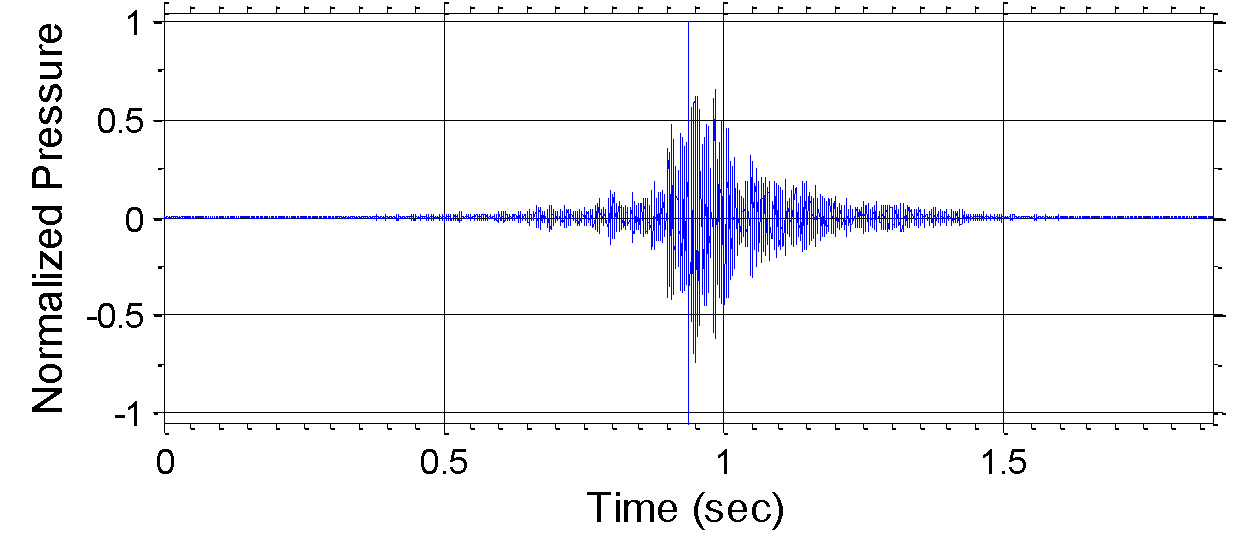
4.4 표적 부재 시와 존재 시의 비교
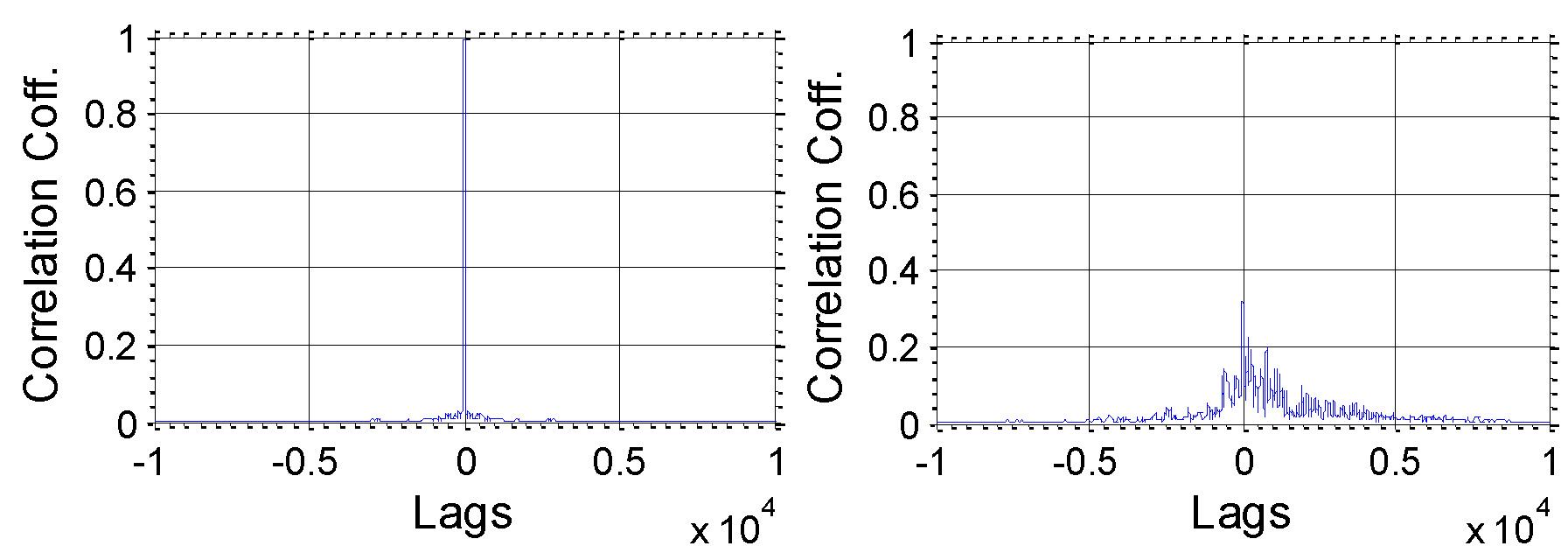
시역전 탐지영역에 표적이 존재하면 표적에 의해 시역전에 의한 집속 음장은 교란을 받게 된다. 그림 14 와 그림 18은 각각 표적 부재 시와 존재 시의 결과로서 표적 존재 시 음파전파과정에서의 표적으로 말미암은 간섭 때문에 예측된 신호 즉, 표적 탐침용 신호와는 매우 다른 신호가 측정됨을 볼 수 있다. 그림 19는 표적 유무에 대한 신호의 정량적인 평가를 위해 표적 탐지용 탐침신호(그림 7)와의 상관계수를 계산한 것이다. 표적 부재 및 존재 시의 최대 상관값은 각각 0.99와 0.32를 보였다. 탐지 측면에서 표적 부재 시와 존재 시의 결과는 두 신호의 차이로부터 다양한 방법을 고안할 수 있을 것이다.
|
그림 19.표적 탐지용 탐침신호와의 상관계수(a) 표적 부재 시, (b) 표적 존재 시 Fig. 19.Correlation coefficient with the detecting probe source signal.(a) in the absence of target, (b) in the presence of target. |