

I. 서 론
II. 파면을 이용한 거리 추정
2.1 기존의 방법
2.2 정합 파면곡률거리추정
III. 거리 추정 시뮬레이션
3.1 시뮬레이션 방법
3.2 파면의 특성
3.3 음원의 거리 추정 결과
3.4 시간지연 오차에 대한 강건성
IV. 결 론
I. 서 론
수중에서 수평선배열을 이용하는 수동소나에서 근거리에 있는 음원의 거리를 추정할 수 있는 기법으로는 직접적인 방법으로써 초점빔형성과 파면곡률거리추정(Wavefront Curvature Ranging, WCR)이 널리 사용된다.[1,2,3,4] 초점빔형성과 파면곡률거리추정은 수동측거소나, 방수소나, 선배열소나, 측면배열소나 등에 적용할 수 있다. 최근에 국내에서도 근거리 음원에 대하여 초점빔형성과 파면곡률거리추정을 이용하여 음원의 거리를 추정하고자 하는 연구가 진행되었다.[5,6,7,8] 기본적으로 초점빔형성과 파면곡률거리추정은 수평으로 배열된 3개 이상의 수신기에 수신된 음향신호의 파면곡률(Wavefront Curvature, WC)을 이용하여 음원의 거리를 추정한다. 활용성 측면에서 알고리즘의 복잡성과 처리시간 측면에서 초점빔형성보다는 파면곡률거리추정이 유리하다. 특히, 초점빔형성은 음향 수신기의 빔폭이 크거나 수신기의 위치 오차 등에 따라 근거리 음원의 방위 정확도가 낮아지는 단점이 있다.[9] 반면에 파면곡률거리추정은 수신기의 위치 오차를 알고 있다면 도달신호의 시간 지연만으로 음원의 거리를 빠르게 추정할 수 있다.
일반적으로 초점빔형성과 파면곡률거리추정은 음파가 방위와 거리의 2차원 평면에서 전달된다는 가정으로부터 파면곡률을 나타내는 시간지연과 음원의 방위를 이용하여 거리를 추정한다. 그러나 음원과 수신기가 운용되는 해양은 2차원 평면이 아닌 3차원 공간(방위, 거리, 수심)이고 음원 신호의 전달에 가장 큰 영향을 미치는 환경변수인 음속구조가 복잡하다. 따라서 2차원 평면과 단순한 환경을 가정하는 기존의 방법을 적용하면 거리추정 오차가 발생할 수 있다.[5,7] 3차원 공간을 고려한 추정 알고리즘이라고 해도 해양환경에서 음파의 반사와 굴절에 의한 다중경로를 고려하지 않았다면 역시 거리오차가 발생하게 될 것이다. 실제 해양환경에서 거리추정 오차를 감소시키기 위해서는 3차원 해양과 다중경로 음파전달 현상을 알고리즘에 반영하여야 한다.[10,11,12] 이를 위해 수중의 음속구조 등의 해양환경을 적용한 음파전달모델로부터 전달경로를 계산하고 시간지연과 방위를 추출하여 거리추정에 적용해야 한다.
본 논문에서는 거리 오차를 줄이기 위해 해양의 음속구조를 적용하고 최대우도추정(Maximum Likelihood Estimation, MLE)방법으로 거리를 추정하는 정합 파면곡률거리추정(Matched Wavefront Curvature Ranging, MWCR)을 제안하였다. 제안한 기법을 적용하여 해양의 다중경로 환경에서 거리추정 성능을 분석하고 거리오차와 원인을 해석하였다. 제안한 방법의 성능과 강건성 등의 특성을 살펴보기 위해 한국 주변해역의 해양환경을 적용하고 위치추정 시뮬레이션을 수행하였다. 위치추정 시뮬레이션은 심해인 동해와 천해인 동중국해의 환경과 수중의 음속구조, 지음향 등을 적용하고 음원의 방위, 거리, 심도를 변화시키며 수행하였다. 제안한 방법을 적용하면 기존 방법보다 거리의 오차를 크게 줄일 수 있었다. 또한 몬테카를로 시뮬레이션 결과로부터 제안한 방법이 강건하다고 판단되었다.
II. 파면을 이용한 거리 추정
2.1 기존의 방법
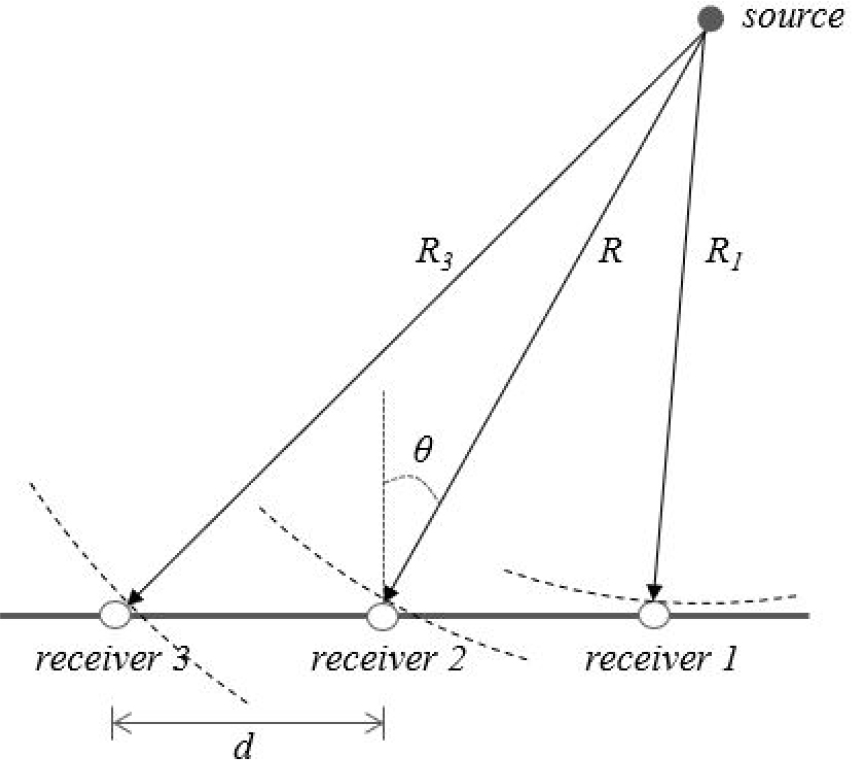
음원의 방위와 거리의 2차원 평면에서 삼각법으로 음원의 거리를 추정할 수 있다. 파면곡률을 이용하는 거리추정은 3개 이상의 수신기로 구성된 배열을 사용한다. 각 수신기는 임의의 위치에 있는 경우를 고려할 수 있지만, 본 논문에서는 3개의 수신기가 평면에서 선형으로 배열되어 있다고 가정하였다. 근거리에 있는 음원과 수신기 간의 거리와 음원의 파면은 Fig. 1과 같고 배열의 중심인 수신기 2에 대한 1과 3의 거리 차는 다음과 같다.[1,2,3,4]
파면곡률을 고려하는 경우에 음원의 음파가 수신기에 도달하는 시간의 차이는 Eq. (1)과 Eq. (2)로부터 다음과 같이 쓸 수 있다.
여기서, 도달시간의 지연은 과 이고, 는 도달시간이다. Eq. (3)과 Eq. (4)를 이용해서 음원과 수신기 사이의 거리를 도달시간 지연으로 표현하면 다음과 같다.
음원에서 배열의 중심에 있는 2번 수신기까지의 거리와 방위는 Eq. (5)와 Eq. (6)을 연립하여 다음과 같이 나타낼 수 있다.
음원으로부터 각 수신기에 도달한 신호의 시간지연을 측정한다면 Eq. (7)과 Eq. (8)를 적용하여 거리와 방위를 추정할 수 있다. 평면파 빔형성으로부터 수신기 3개의 위치에서 독립된 각각의 방위가 추정된다면 음원의 거리추정이 가능하지만 빔폭이 좁고 방위 정확도가 매우 높아야 가능하다. 본 논문에서는 음원의 방위가 대략 주어지고 해당 방위에서 도달시간의 지연이 추출된다고 가정한다. 기존의 파면곡률거리추정 기법은 음원과 수신기 간의 거리를 직선으로 가정하고 음속 는 상수인 기준음속()을 적용한다. 일반적으로 기준음속을 1,500 m/s로 가정한다.
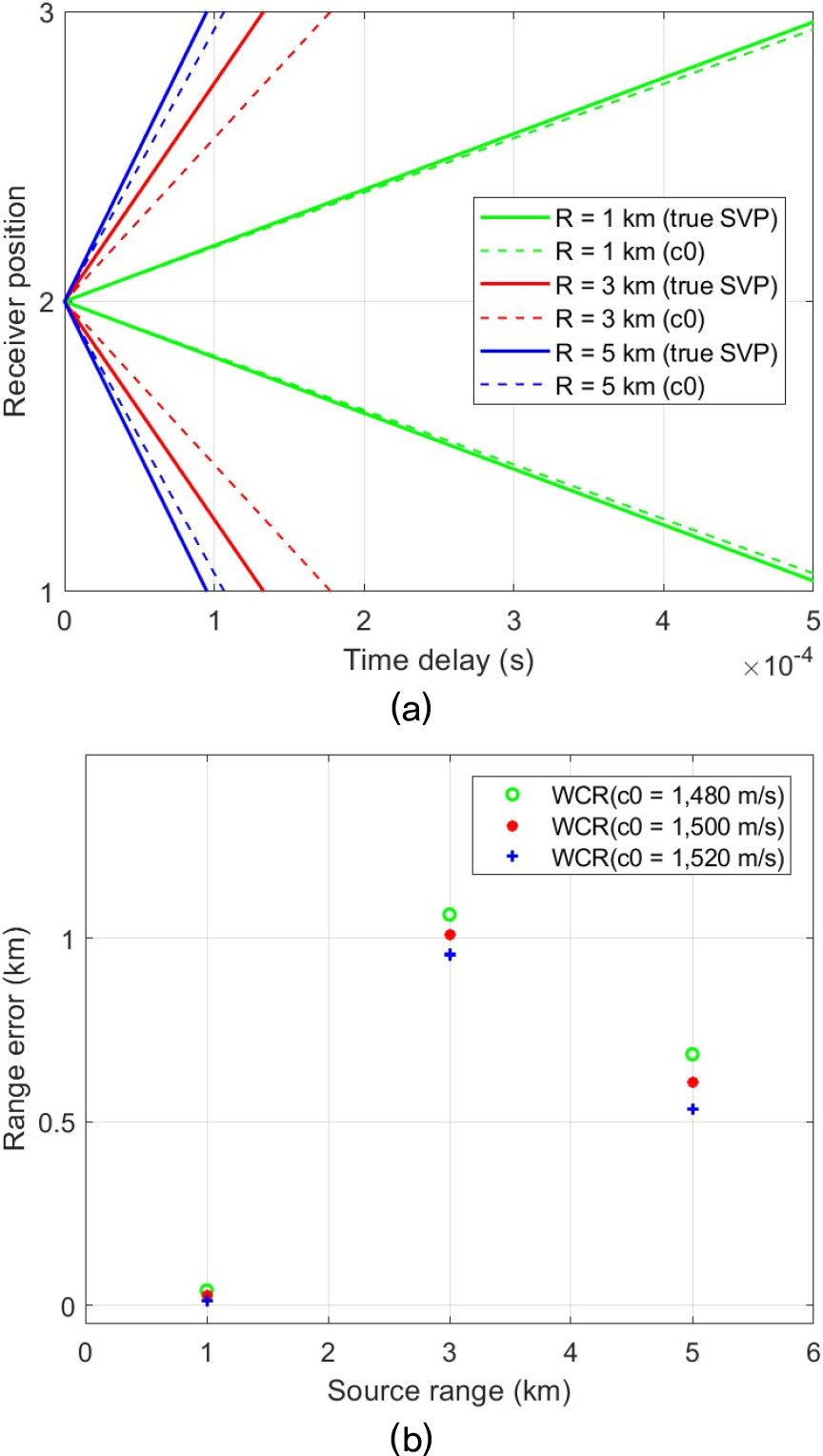
음원의 신호가 수신기에 전달될 때는 해양의 음속구조의 영향을 받지만 삼각법을 적용하는 기존의 방법은 이를 단순화하여 음속을 상수로 적용한다. Fig. 2(a)는 음속 를 기준음속()인 1,500 m/s와 시간지연과 해양의 음속구조를 적용한 경우에 브로드사이드 기준으로 0도에 있는 음원으로부터 도달한 시간지연의 차이를 볼 수 있다. 이러한 시간지연의 차이는 위치 추정 오차에 영향을 준다. Fig. 2(b)는 R = 1 km, 3 km, 5 km에 있는 음원으로부터 음파가 해양의 음속구조를 통해 수신기에 수신된 경우에 기준음속을 각각 1,480 m/s, 1,500 m/s, 1,520 m/s으로 적용하여 Eq. (7)로 부터 계산한 음원의 거리를 보여준다. R = 1 km의 경우에 거리오차는 작아서 무시 가능하지만, R = 3 km와 R = 5 km의 거리오차는 각각 > 1 km와 > 0.5 km로써 무시하지 못할 정도이다. 상수로 적용하는 음속의 크기가 달라지면 거리의 오차도 차이가 난다. 음원의 거리별로 오차가 다른 것은 음파전달 경로와 수신기별 거리의 차이가 음원의 거리별로 달라지기 때문이다.
2.2 정합 파면곡률거리추정
거리 오차를 줄이려면 실제 해양환경을 반영한 새로운 방법이 필요하다. 해양환경에서 음파전달의 시간지연에 가장 큰 영향을 미치는 것은 수중 음속구조이다. 해양환경을 적용하여 음파의 시간지연을 계산할 수 있는 수단은 음선기반의 모델이 널리 활용된다. 음속구조를 반영한 음선의 계산은 쉽지만 파면곡률거리추정에 적용하려면 다중경로의 단순화와 새로운 추정 알고리즘이 필요하다.
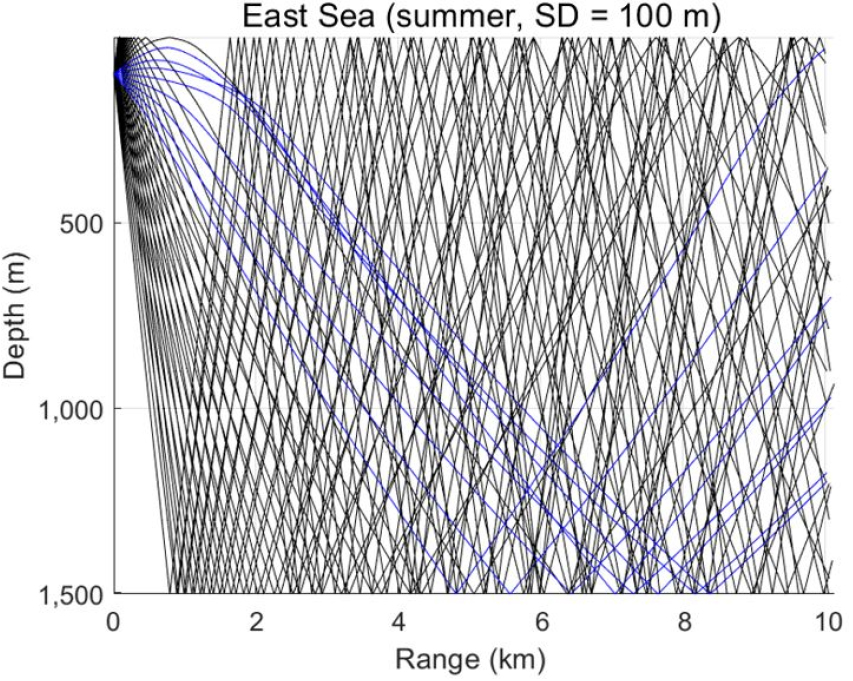
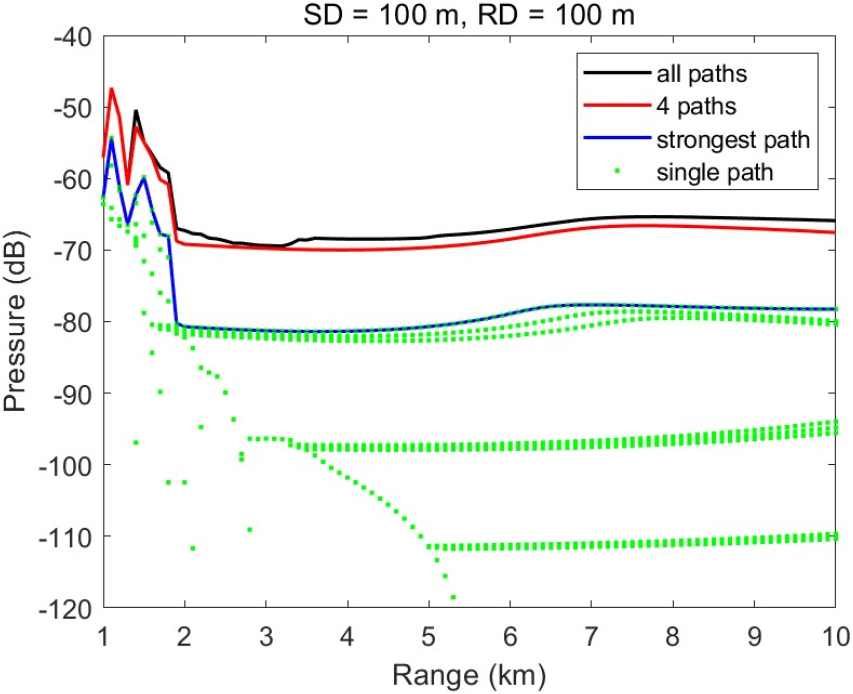
다중경로를 계산하기 위해 음선기반의 음향모델인 Bellhop[13]을 사용했다. 이후에 설명할 eXpendable BathyThermograph(XBT)로 측정한 수온을 이용하여 계산한 동해의 여름철 음속구조를 적용하고 계산한 음선경로를 나타낸 Fig. 3에서 다중경로를 볼 수 있다. 특징적으로는 근거리에서는 해저면에 반사되지 않은 직접도달 경로가 나타나고 이어서 해저면반사 경로가 보인다. Fig. 3에서 음원의 심도는 Source Depth(SD)로 표기하고 수신기의 심도는 Receiver Depth(RD)로 표기했다. 수심 10 m의 단면에 대한 각각의 경로에 대한 음압을 나타낸 Fig. 4를 보면 음압이 다른 다중경로 를 볼 수 있다. Fig. 4에서 경로별로 음압의 차이가 크고, 음압이 유사한 경로가 모여 있는 것을 볼 수 있다. 전체 음장의 음압에 지배적으로 영향을 주는 경로는 음압이 큰 4개이다. 이 경우에는 모든 경로의 음압을 더한 경우와 음압의 크기 순으로 상위 4개까지만 더한 음압의 크기가 유사하다. 또한 음압이 큰 경로들은 서로 유사한 전달 경로로 전달되고 수신기에 수신된 음파의 특성을 지배적으로 결정한다. 즉, 상위 4개까지만 더한 음압과 가장 큰 경로의 음압의 거리별 경향이 거의 같다. 이러한 다중경로의 특성은 해양의 조건에 따라 다를 수 있어도 음압이 가장 큰 전달경로가 시간지연을 결정할 것이다. 이를 근거로 음압이 가장 큰 경로 1개만 선택해서 적용했다. Eq. (9)와 Eq. (10)처럼 경로 중에서 음압이 가장 큰 경로 에 대응되는 도달시간 와 시간지연을 추출하고 거리추정에 적용하였다. 추출한 도달시간 로부터 기준이 되는 2번 수신기와 각 수신기와의 시간 지연을 Eq. (11)과 Eq. (12)와 같이 탐색 거리별로 계산한다.
여기서, 는 수신기 번호이고 는 전달경로 번호이다. 시간지연을 계산하고 추출하는 과정에서 발생할 수 있는 오차는 무시하였다.
수신기에서 관측한 시간지연과 해양환경을 반영한 음파전달 모델로부터 계산한 시간지연을 적용하여 거리를 추정하는 경우에는 여러 개의 추정값이 존재하므로 최대우도추정을 적용하여 하나의 거리를 결정한다. 음원의 거리가 미지수이므로 가능한 거리의 범위를 설정하고 Bellhop으로 모든 탐색 격자점에 대하여 시간지연을 계산한다. 탐색 격자점의 시간지연과 관측한 시간지연이 서로 가장 유사한 격자점의 거리를 음원의 거리로 추정하는 것이 최대우도추정 기법이다.[14,15] 먼저 유사도함수는 Eq. (13)과 같고, 결과가 너무 작게 표현되지 않도록 유사도함수에 로그를 적용하면 Eq. (14)와 같다. 여기서, 는 시간지연 또는 거리와 독립적이며 결과의 용이한 표현을 위해 임의로 조절하는 상수, 는 해양환경, 수중소음, 수신기와 음원의 위치 등의 영향을 받는 시간지연의 변동을 나타내는 스펙트럼 밀도로 결정하는 분산,[15]은 시간지연 관측 개수이다.
실제 적용하는 경우에 Eq. (14)에서 음원의 거리를 추정하는데 불필요한 부분을 제거하여 Eq. (15)와 같이 단순하게 표현할 수 있다.[15]
유사도함수에서 최대값을 갖는 음원의 거리를 추정하는 최대우도추정은 다음과 같이 표현된다.
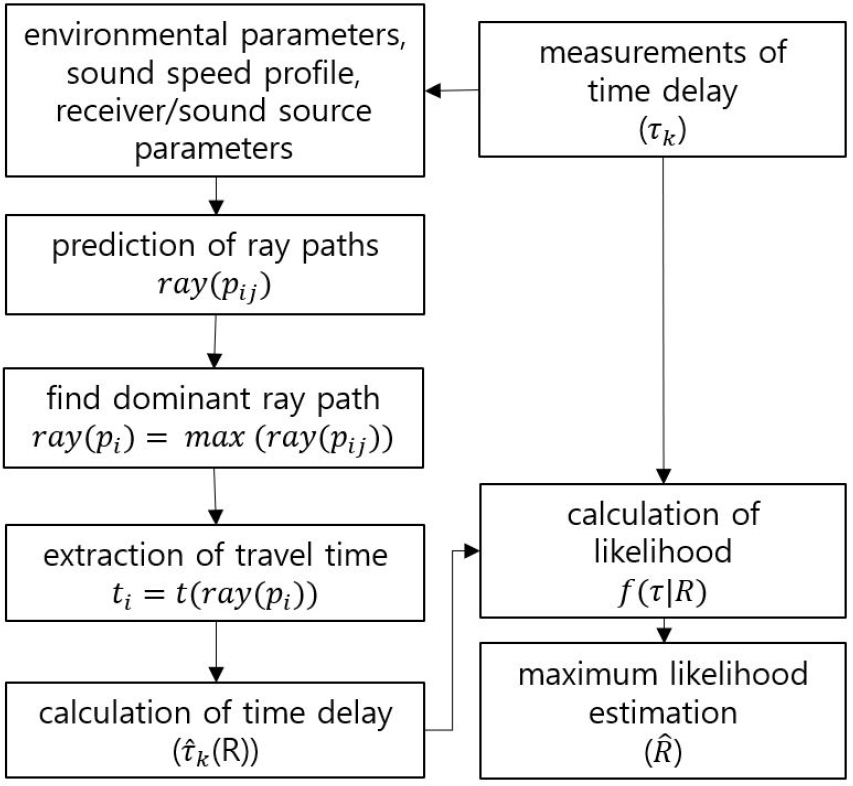
수중의 음속구조를 적용하고 음파전달 모델과 최대우도추정 기법을 적용하여 음원의 거리를 추정하는 방법의 흐름도는 Fig. 5와 같고, 제안한 방법의 명칭을 정합 파면곡률거리추정(Matched Wavefront Curvature Ranging, MWCR)으로 칭한다.
III. 거리 추정 시뮬레이션
3.1 시뮬레이션 방법
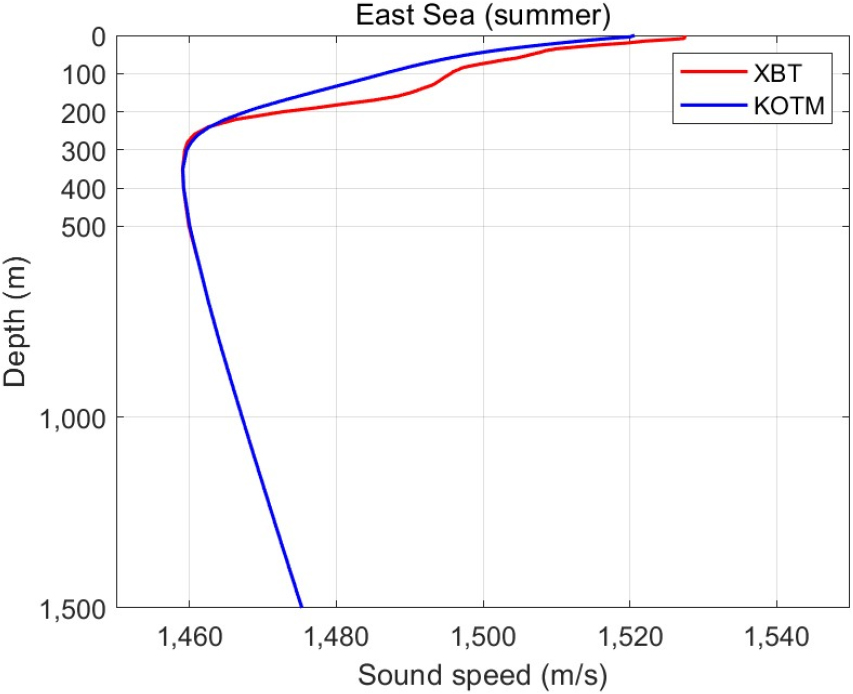
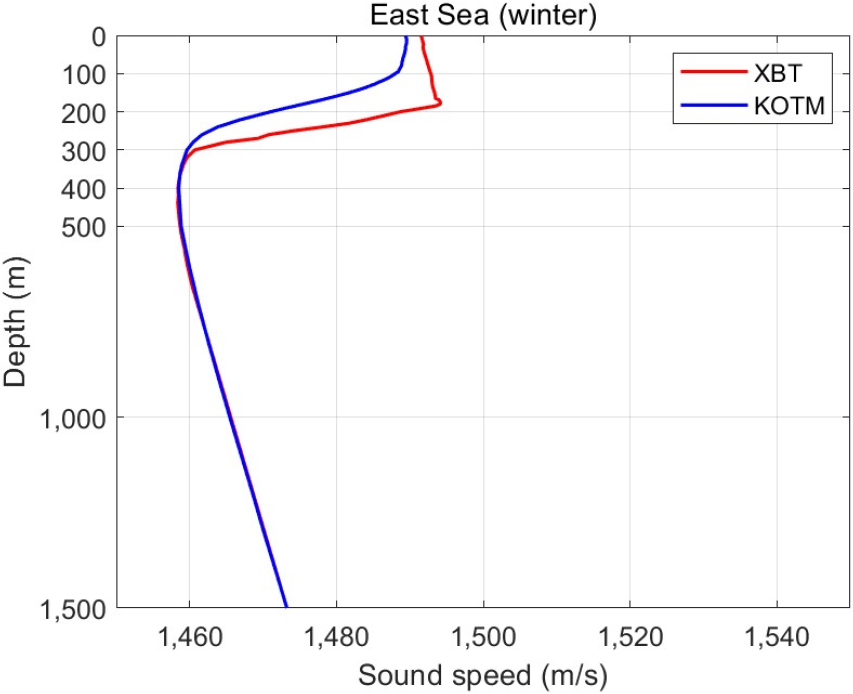
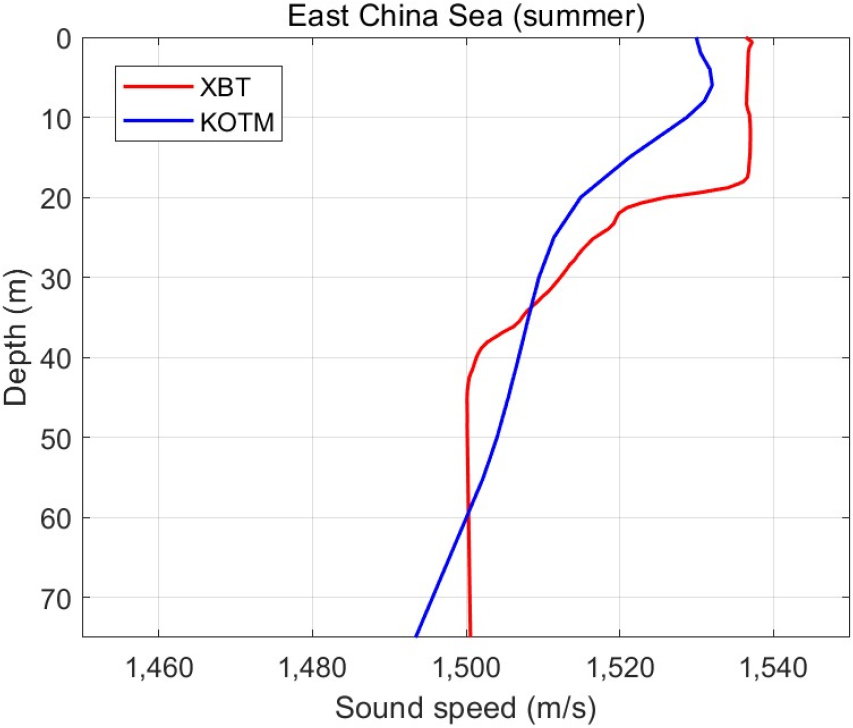
3개의 수신기를 적용하고 동해와 동중국해의 해양환경에서 정합 파면곡률거리추정의 거리 추정 시뮬레이션을 수행했다. 동해는 Fig. 6과 Fig. 7과 같은 여름철과 겨울철의 음속구조를 적용하고, 동중국해는 Fig. 8과 같은 여름철의 음속구조를 적용했다.
수신기의 간격은 40 m이고 심도는 동해에서는 100 m와 200 m, 동중국해에서는 40 m로 설정했다. 음원의 최대 거리는 10 km이고 심도는 표층에 있는 음원을 가정한 10 m와 음속구조의 변화가 큰 구간에 있는 음원을 가정하여 100 m와 200 m로 설정하였다. 음원의 주파수는 2 kHz이고 방위는 브로드사이드를 기준으로 0 deg, 15 deg, 30 deg, 45 deg로 가정하였다. 파면곡률을 적용하는 거리추정은 음원의 방위가 엔드파이어에 가까워질수록 유효 배열 길이가 짧아져서 어려워지므로 음원의 방위를 45 deg까지만 분석하였다.
일반적으로 음원이 존재하는 구역의 해양환경을 정확하게 파악하기는 어렵다. 따라서 시뮬레이션에서도 이러한 상황을 고려하여 음원의 신호가 전달되는 매질은 XBT로 관측된 음속구조라고 가정하고, 수신기에서는 평균값인 Korean Ocean Temperature Model(KOTM)을 사용한다고 가정한다. 즉, 음원 신호의 시간지연인 은 XBT의 음속구조를 적용하여 계산하고, 유사도 측정을 위해 필요한 비교용 시간지연인 은 KOTM의 음속구조를 적용하여 계산하였다. XBT와 KOTM을 적용하고 음파전달을 계산하면 직접도달파와 해저면과 해수면 반사의 경향이 서로 달라서 동일한 조건에서 계산한 와 는 일치하지 않는다.
3.2 파면의 특성
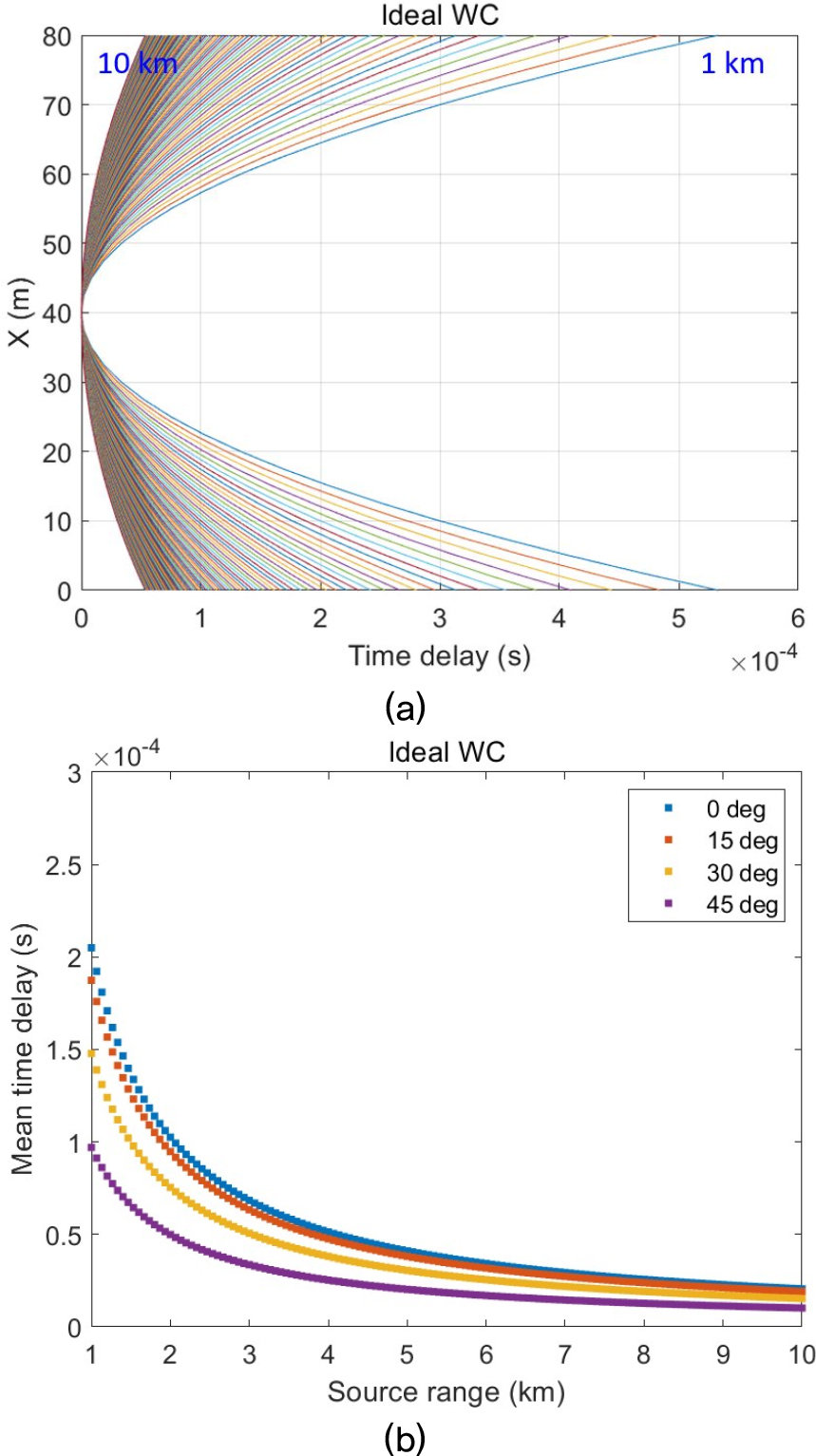
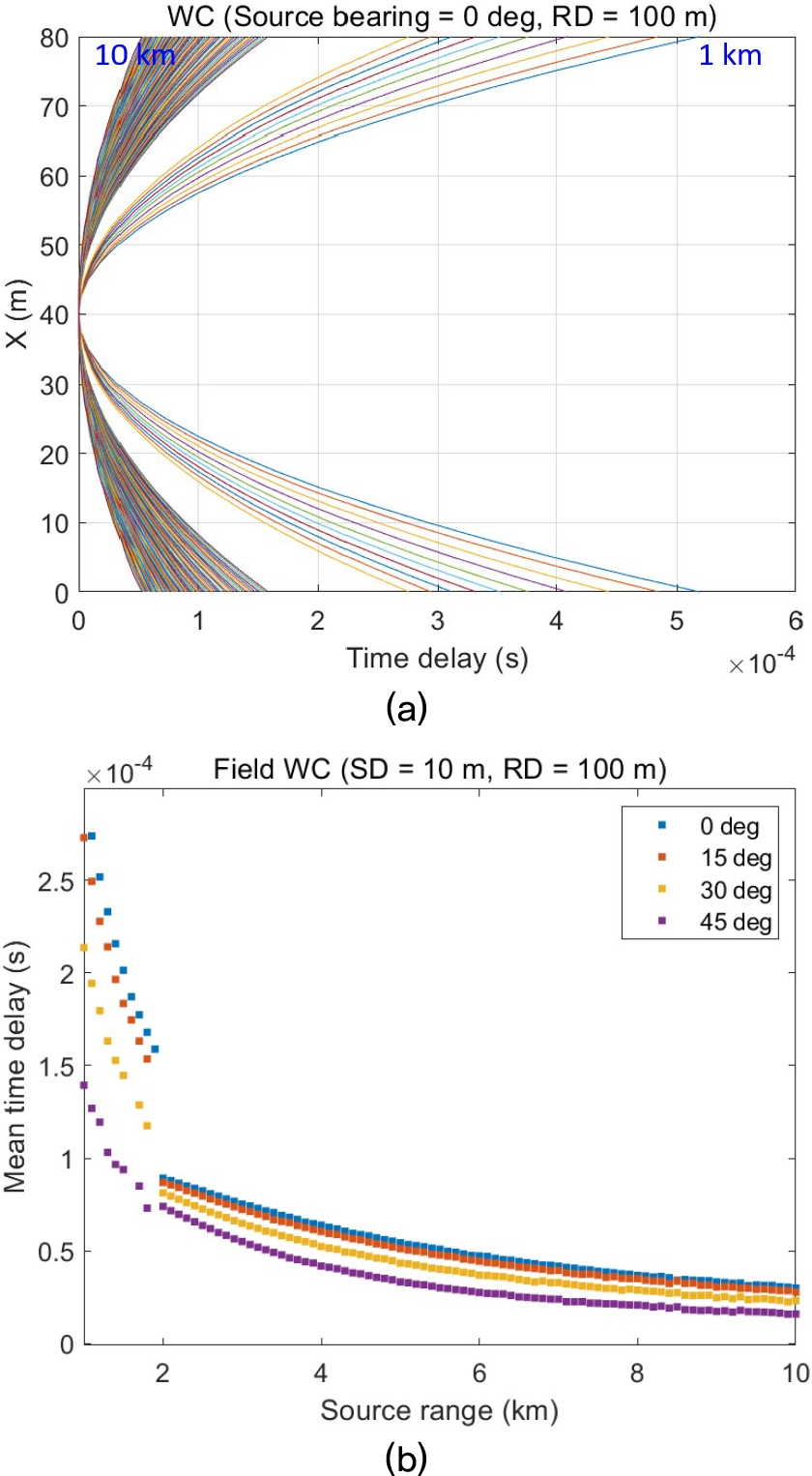
음속이 상수인 경우의 음파의 파면을 거리별로 나타내면 Fig. 9(a)와 같다. 음원의 거리가 가까울수록 시간지연이 크고 거리가 멀어지면서 시간지연이 지속적으로 작아진다. 거리별로 평균하면 Fig. 9(b)와 같고 음원의 방위가 커지면 시간지연이 작아진다. Fig. 10(a)는 Bellhop 모델로 계산하였으며, 동해의 여름철의 파면이다. Fig. 10(a)의 파면의 변화는 Fig. 9(a)와 유사하지만 시간지연이 0.0015 s ~ 0.0028 s 구간에서 불연속이 나타난다. 평균 시간지연을 나타낸 Fig. 10(b)를 보면 약 2 km를 경계로 불연속 구간이 보인다. 불연속 구간은 Fig. 3과 같이 거리에 따라 음파전달의 특성이 달라져서 발생한다. Fig. 3에서 약 2 km 이내의 근거리에서는 직접도달파가 우세하다가 거리가 증가하면서 해저면반사파가 우세해지며, 그 영향으로 Fig. 10(b)의 시간지연에 불연속 구간이 발생했다. 이러한 특성은 시간과 해역 또는 음원과 수신기의 심도 등이 달라지면 불연속 강도와 불연속이 발생하는 거리가 달라질 것이다.
3.3 음원의 거리 추정 결과
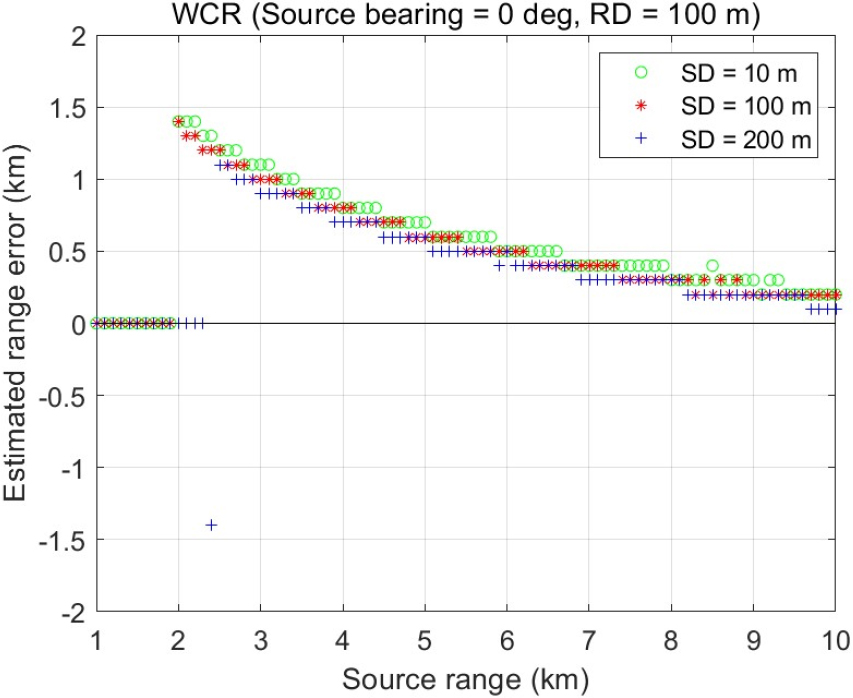
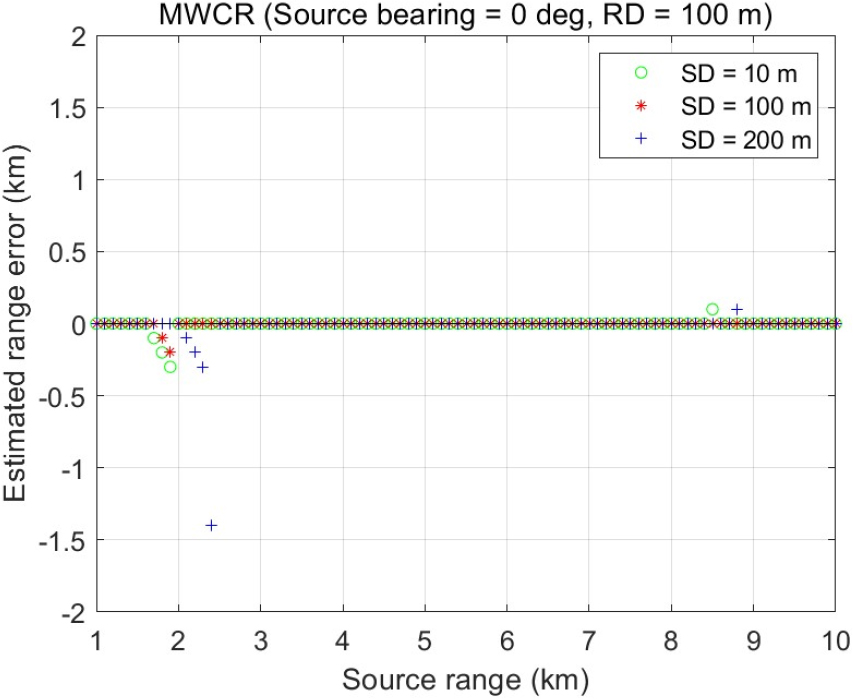
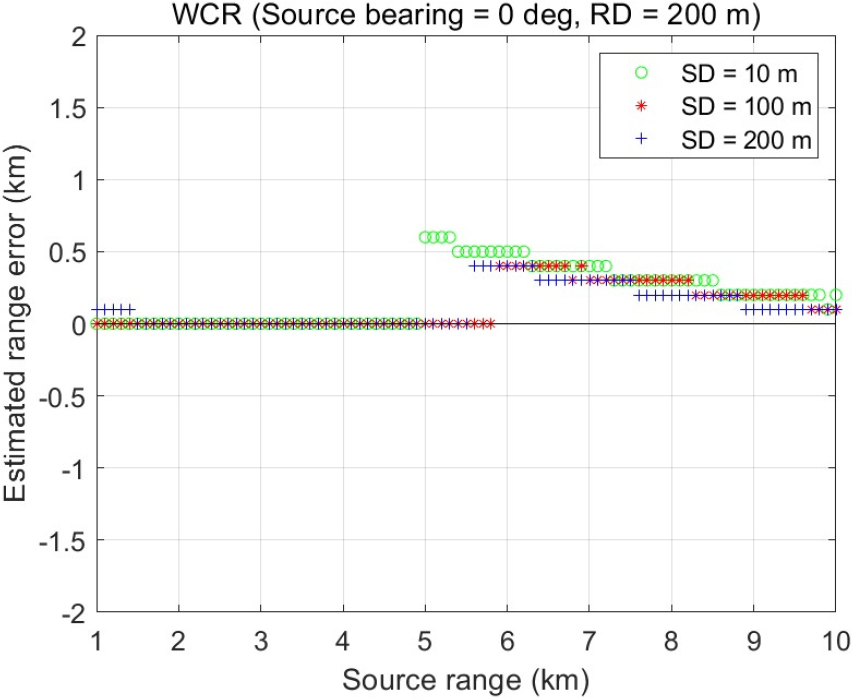
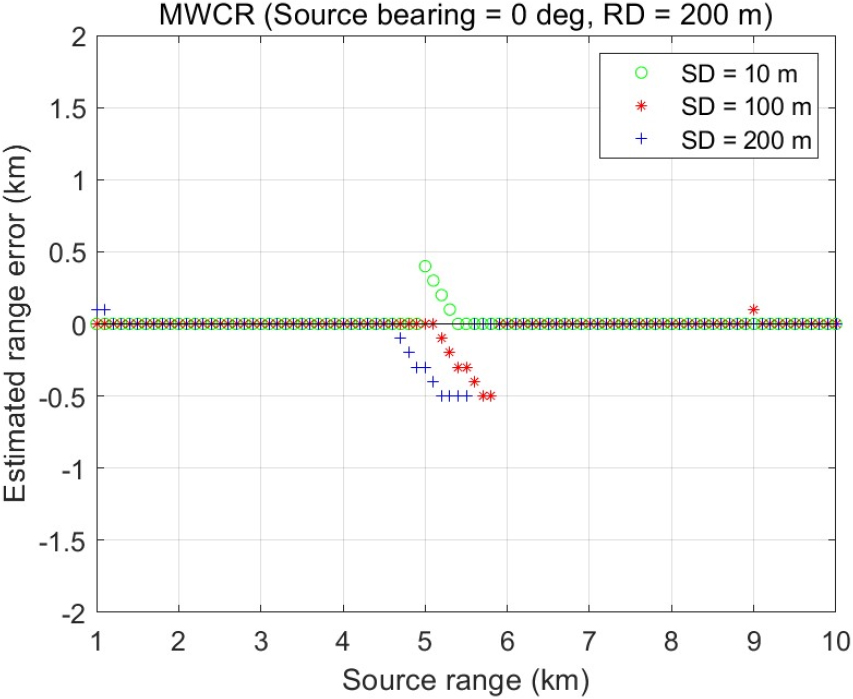
수신기에서 측정한 시간지연 에는 XBT를 적용하고 비교용 시간지연 의 계산을 위한 음속구조를 상수인 1,500 m/s를 적용하고 기존의 방법으로 거리를 추정하면 Fig. 11과 같다. 측정한 시간지연 과 비교용 시간지연 의 크기가 다르고 불연속구간이 존재하므로 거리오차가 발생했다. 2 km 이내의 근거리에는 직접도달파가 우세하므로 거리오차가 없지만 2 km보다 먼거리에서는 최대 1.4 km의 거리오차가 발생했다. 비교 음장의 시간지연 의 계산에 KOTM을 사용하고 제안한 방법으로 음원의 심도별 거리를 추정하면 Fig. 12와 같다. 음원 거리가 1.8 km ~ 2.3 km 근처일 때 약 0.4 km의 거리오차가 나타나며, 음원의 심도가 다르면 불연속이 발생하는 거리도 달라지므로 거리 오차가 발생하는 거리도 다르게 나타났다. 제안한 방법에서도 나타나는 이러한 거리 오차는 XBT와 KOTM의 음속구조에 의한 직접도달파와 해저면반사파가 우세한 경계가 서로 달라서 유사도가 낮아지기 때문이다. 음원이 표층인 10 m에 있는 경우에 해저면 반사가 먼저 일어나기 때문에 거리오차가 최근거리에서부터 나타났다. 8.7 km에서 나타난 미약한 거리오차는 해저면반사파가 해수면 근처에서 해수면에 반사되지 않고 굴절되는 거리가 서로 달라서 발생했다. Fig. 6과 같이 XBT와 KOTM의 음속구조가 200 m보다 낮은 상층에서 차이가 크지만 불연속 구간을 제외하면 추정 오차가 크지 않았다.
동해의 겨울철 경우에 비교음장의 계산에 상수인 1,500 m/s를 적용하고 거리를 추정하면 Fig. 13과 같다. 겨울철에는 음속구조의 변화가 줄어들어 여름철보다 해저면반사가 근거리에서부터 강하게 발생하지는 않는다. 해저면반사파가 5 km를 지나 우세하게 나타나지만 거리오차는 0.6 km정도로 줄어들었다. 비교 음장의 시간지연 의 계산에 KOTM을 적용한 경우는 Fig. 14와 같다. 역시 XBT와 KOTM의 음속구조에 의한 해저면반사파가 우세한 경계가 서로 달라져서 5 km 부근에서 0.5 km의 거리오차가 발생한다. 여름철과 유사하게 불연속 구간을 제외하면 오차가 작다.
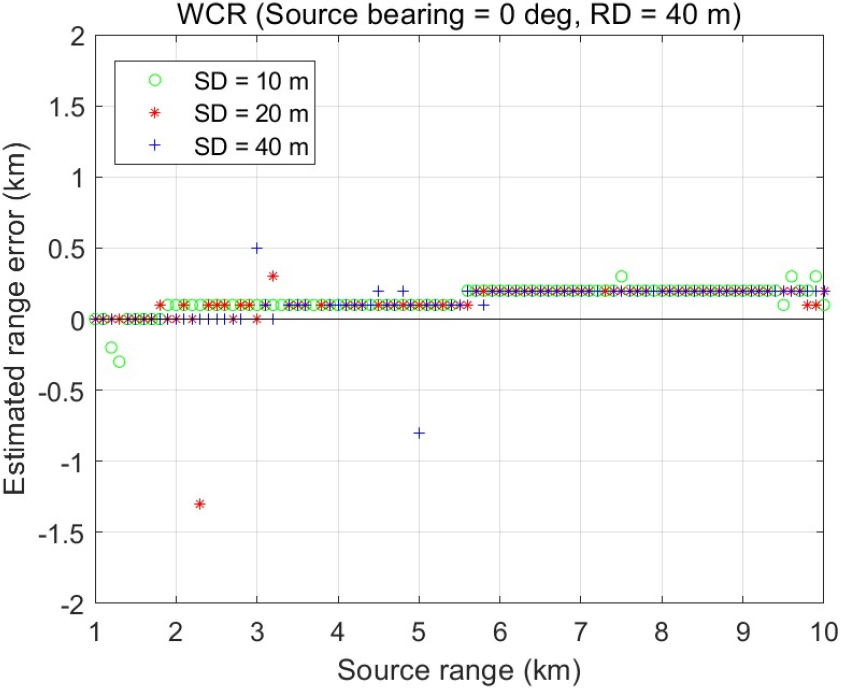
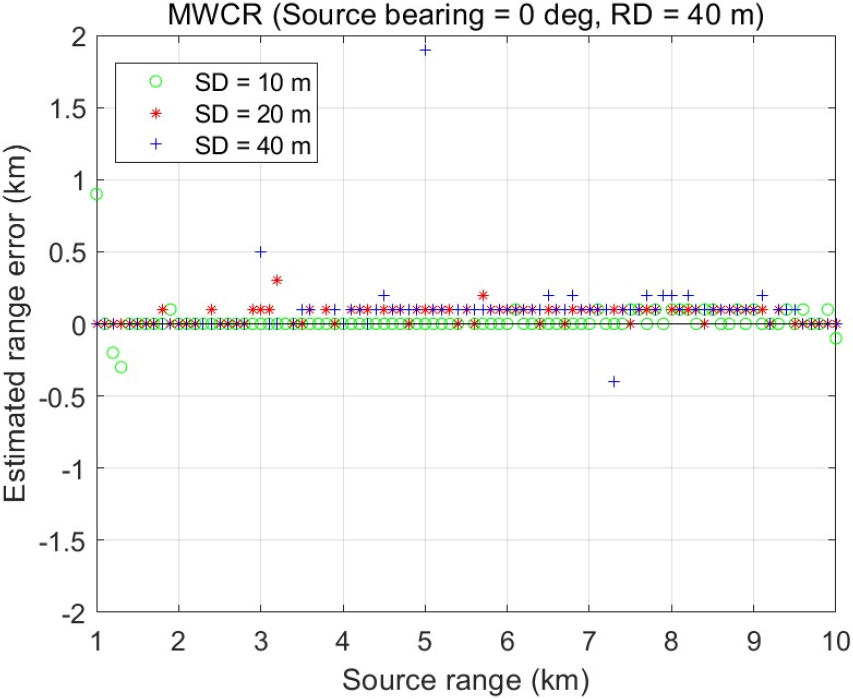
천해인 동중국해의 여름철 경우에 기존의 방법으로 거리를 추정하면 Fig. 15와 같다. 동해의 경우보다 거리오차가 낮으며 근거리에서 부터 음파가 전 수심을 반사하며 전달되므로 불연속 구간이 없기 때문이다. 비교 음장의 시간지연의 계산에 KOTM을 적용하고 제안한 방법으로 거리를 추정하면 Fig. 16과 같다. 파면곡률의 불연속이 없기 때문에 기존의 발법과 제안한 방법의 결과가 유사하다.
3.4 시간지연 오차에 대한 강건성
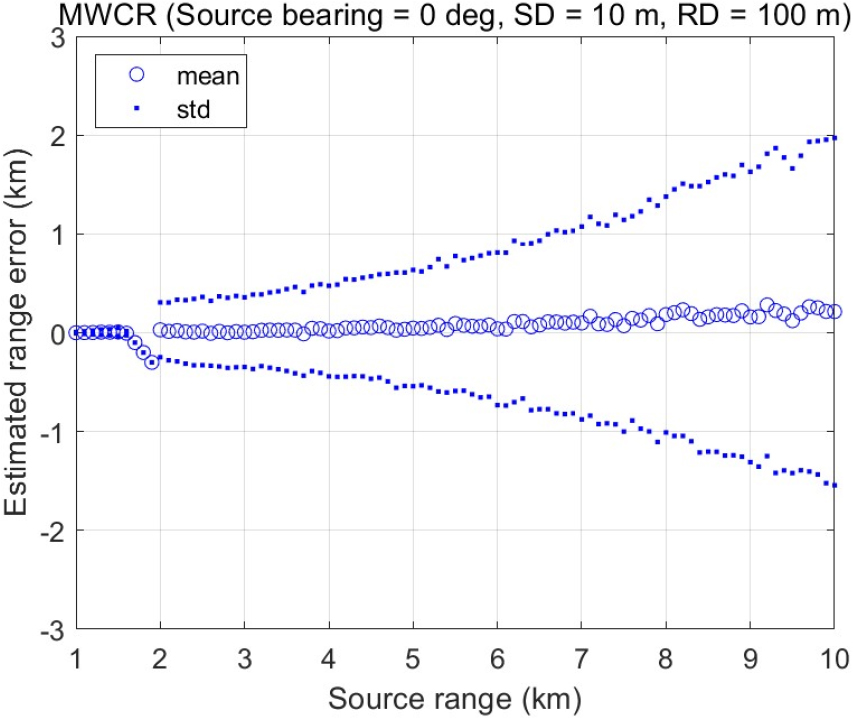
해양환경의 불일치 이외에도 거리추정에 영향을 주는 요인은 수신기 위치 오차, 신호대잡음비, 신호처리 오차 등이 있을 수 있다. 다양한 오차 요인에 의하여 수신기에서 시간지연의 추출 오류가 발생할 수 있다고 가정하고 거리 추정 성능을 분석하였다. 시간지연의 추출 오류에 의해 발생하는 거리추정 성능의 변화를 분석하기 위해 몬테카를로 시뮬레이션을 수행하고 그 결과로부터 강건성을 판단했다. 몬테카를로 시뮬레이션의 조건은 샘플링 주파수는 30 kHz, 각 수신기가 독립적으로 ± 1개씩의 샘플 오류 포함, 몬테카를로 시뮬레이션 반복 수는 1,000회이다. 1,000회의 시뮬레이션 결과는 평균과 표준편차로 정량화하여 나타내고, 그 결과에 따라 제안한 방법의 강건성을 판단하였다.
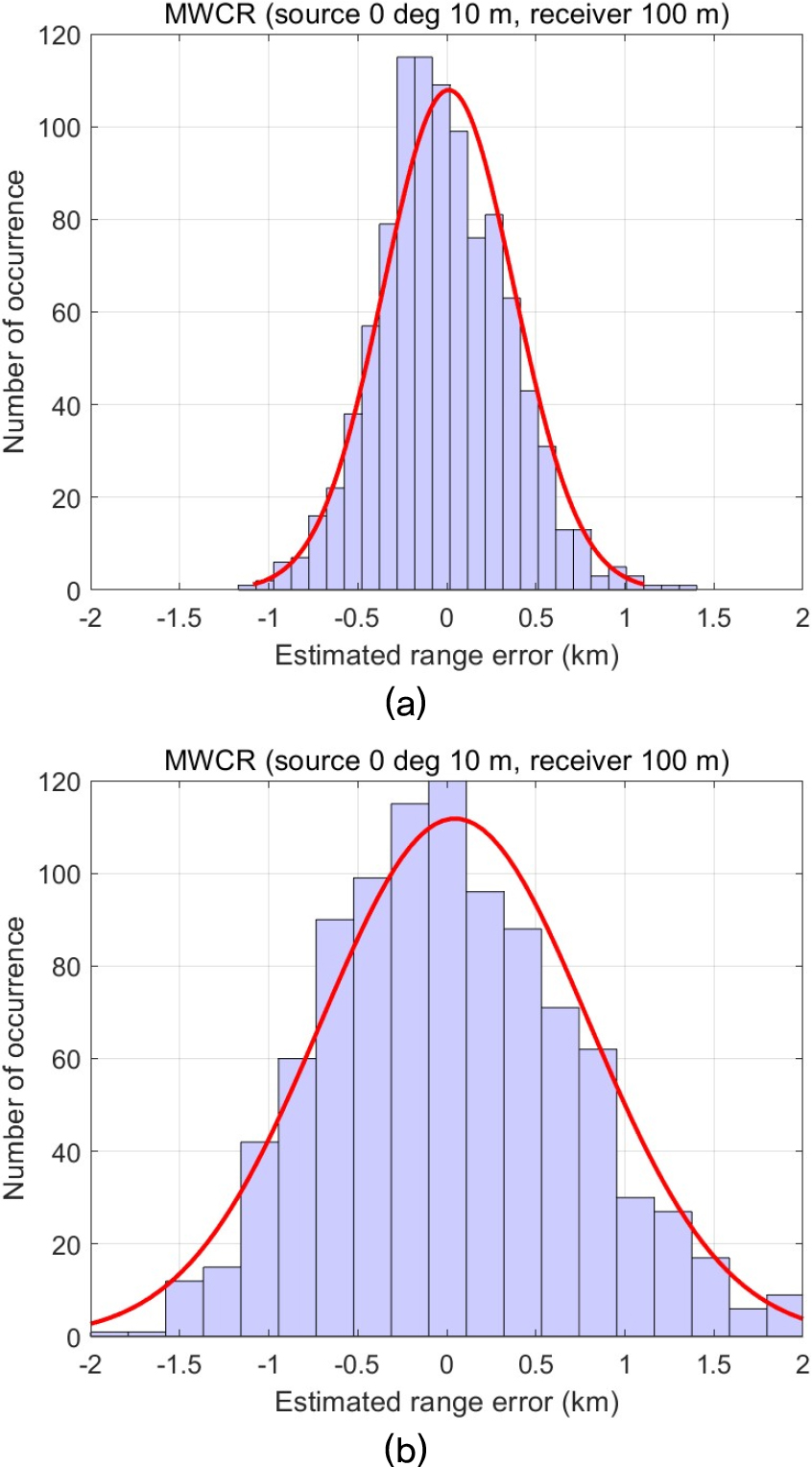
Fig. 17은 음원의 심도가 10 m인 경우에 정합 곡률반경거리추정의 몬테카를로 시뮬레이션 결과이며. 평균값이 0에 가깝지만 불연속구간에서는 불일치 영향이 나타났다. 표준 편차는 거리가 증가하면서 크기가 커졌다. 거리가 멀어지면 파면곡률이 작아지므로 추정 결과가 오류에 민감해지므로 거리가 멀게 추정되는 경향이 있다. 그리고 몬테카를로 시뮬레이션 결과에서 음원의 거리가 3 km와 6 km인 경우의 거리오차의 도수와 분포는 Fig. 18과 같고 대체로 0을 중심으로 정상 분포를 하는 것으로 보인다. 만약 음원의 신호를 수신한 시간에 현장에서 즉시 XBT로 수온구조를 관측하여 계산한 수중음속구조를 적용하여 비교음장을 예측하여 적용한다면 평균 값인 KOTM을 적용하는 경우 보다 음원의 거리추정 정확도를 높일 수 있을 것으로 예상된다. 단, 해양환경은 시공간 변동이 존재하므로 현장 관측한 XBT의 수온을 적용해도 거리오차를 완전하게 없애기는 어려울 것으로 예상된다.
IV. 결 론
파면곡률거리추정은 여러 개의 수신기에 수신된 음향신호의 파면곡률을 이용하여 음원의 거리를 추정한다. 본 논문에서는 기준 음속만 적용하는 기존의 파면곡률거리추정 기법의 성능을 분석하고 파면곡률의 불연속이 존재하는 해양환경에서 성능을 개선하기 위해 음속구조와 음선경로를 적용하는 새로운 기법을 제안하였다. 제안된 기법을 이용하여 수중의 음속구조를 변경하며 거리추정 성능을 분석하였다.
수중에서 적용되는 기존의 파면곡률거리추정 기법은 비교 음장을 계산하기 위한 음속을 상수로 적용하고 삼각법을 이용하여 음원의 거리를 계산한다. 동중국해와 같이 수신기에 수신된 음원의 파면에 불연속 구간이 없는 경우에는 기존의 기법을 적용해도 거리의 오차가 크지 않다. 하지만 동해의 여름철과 같이 강한 부음속구조를 갖는 심해에서는 직접도달경로와 해저면반사경로가 우세한 구간이 뚜렷하게 분리되므로 거리에 따른 파면곡률에 불연속 구간이 존재하게 되고 추정 거리의 오차가 커질 수 있다.
파면곡률의 불일치에 의한 거리 오차를 줄이려면 실제 해양환경을 반영한 새로운 방법이 필요하다. 해양환경에서 음파전달의 시간지연에 가장 큰 영향을 미치는 것은 수중 음속구조이다. 본 논문에서는 수중의 복잡한 음속구조로부터 계산한 다중경로를 적용하고, 유사도를 추정한 결과로부터 음원의 거리를 결정하는 최대우도추정 기법을 적용한 정합 파면곡률거리추정 방법을 제안하였다.
정합 파면곡률거리추정의 시뮬레이션 결과로부터 기존의 방법보다 거리의 오차가 크게 줄어듦을 확인하였다. 제안한 기법의 시간지연 오류에 대한 강건성을 판단하기 위한 몬테카를로 시뮬레이션을 수행하였으며, 평균 거리오차는 0에 가깝게 안정적이고 거리 확률분포 또한 대체로 0을 기준으로 정상 분포하므로 비교적 강건하다고 판단된다.
정합 파면곡률거리추정 기법도 일반적인 적용 상황을 고려하는 경우에는 거리 오차가 남아 있다. 수신기를 운용하는 구역의 음속구조를 실측하여 비교음장을 계산하면 평균값인 KOTM을 사용하는 경우보다는 더 정확해지므로 거리오차를 더 줄일 수 있을 것으로 예상된다.
향후에 신호대잡음비 등에 의한 영향을 추가하여 분석하고 실측 신호로부터 안정성을 확인하면 시스템에 적용 가능할 것으로 판단된다.
