

I. 서 론
능동소나는 송신펄스를 방사하여 표적에 맞고 반향 되는 신호를 수신하여 이를 분석하는 신호처리 시스템이다. 능동소나의 송신펄스로는 CW(Continuous Wave) 신호, LFM 신호 등이 사용되는데, 일반적으로 CW 신호는 도플러효과를 이용한 표적의 속도 추정에, LFM 신호는 표적의 탐지 및 거리 추정에 사용된다. 특히 LFM 신호를 이용한 표적의 탐지 및 거리 추정은 군사적 관점에서 매우 중요한 요소이므로 높은 정확성이 요구되는데, 수신 신호 내에서 표적에 반사된 LFM 신호 성분을 탐지하기 위한 방법으로는 푸리에 변환을 이용한 정합 필터 방식이 주로 사용된다.
Fractional 푸리에 변환은 기존의 푸리에 변환 개념을 일반화한 분석 방법으로 LFM 신호의 처리에 많은 장점을 가진다. 시간-주파수 영역에서 선형적인 특성을 갖는 LFM 신호에 대해 FrFT는 피크 형태의 스펙트럼을 얻을 수 있으므로 잡음이나 잔향 환경에 강인한 탐지 및 거리 추정이 가능하다. 본 논문에서는 능동 LFM 신호에 대해 FrFT 스펙트럼 분석을 통해 수신된 신호 내에서의 LFM 신호 구간을 검출하여 표적과의 거리를 추정하는 새로운 방법을 제안하고, 실험을 통해 제안한 방법의 타당성을 검증한다.
본 논문의 구성은 다음과 같다. II장에서는 FrFT의 기본적인 개념과 LFM 신호와의 관계 및 최적 변환차수에 대해 설명한다. III장에서는 FrFT 스펙트럼을 통해 표적과의 거리를 추정하는 방법을 설명하고, IV장에서 실험을 통해 이를 검증한다. 마지막으로 V장에서 결론을 맺는다.
II. Fractional 푸리에 변환 및 최적변환차수 
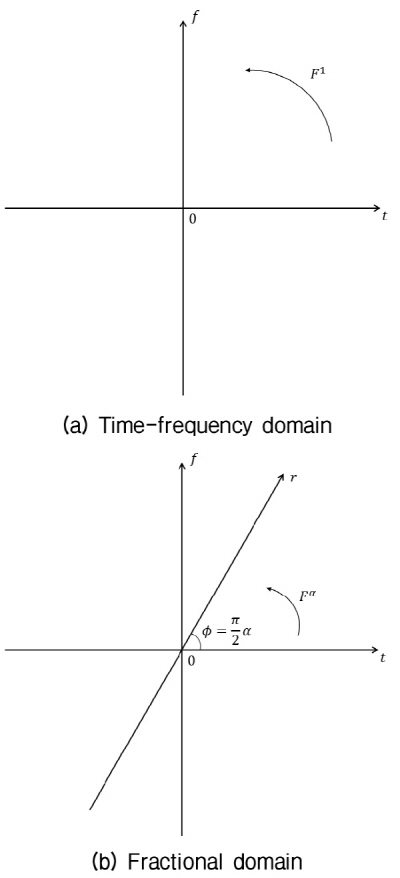
FrFT는 기존의 푸리에 변환 개념을 일반화한 것으로, 시간영역의 신호를 시간-주파수의 중간 영역으로 변환할 수 있도록 한 것이다. 즉, 시간영역을  -축, 주파수영역을
-축, 주파수영역을  -축으로 표시할 때 기존의 푸리에 변환은
-축으로 표시할 때 기존의 푸리에 변환은  -축을 시계반대방향으로
-축을 시계반대방향으로  만큼 회전시킨 결과를 의미하는데, FrFT는 시계반대방향으로 임의의 각도
만큼 회전시킨 결과를 의미하는데, FrFT는 시계반대방향으로 임의의 각도  만큼 회전시킨 결과를 의미한다. Fig. 1은 시간-주파수 영역과
만큼 회전시킨 결과를 의미한다. Fig. 1은 시간-주파수 영역과  축으로 나타낸 fractional 영역의 개념을 나타낸 것인데, FrFT는
축으로 나타낸 fractional 영역의 개념을 나타낸 것인데, FrFT는  로 정의되는 차수(order)에 따라 다양한 특성을 갖는 스펙트럼을 얻을 수 있다. Fig. 1에서 좌표축의 회전원점은 전체 분석프레임의 길이가
로 정의되는 차수(order)에 따라 다양한 특성을 갖는 스펙트럼을 얻을 수 있다. Fig. 1에서 좌표축의 회전원점은 전체 분석프레임의 길이가  일 때 그 절반인
일 때 그 절반인  에 해당되며, fractional 영역에서도
에 해당되며, fractional 영역에서도  축의 중심점에 해당된다.
축의 중심점에 해당된다.
신호  의 FrFT는 Eqs.(1) ~ (5)와 같이 정의된다.[1-4]
의 FrFT는 Eqs.(1) ~ (5)와 같이 정의된다.[1-4]
 , (1)
, (1)
 , (2)
, (2)
 , (3)
, (3)
 , (4)
, (4)
 . (5)
. (5)
즉, 신호  의
의  -차수의 FrFT는 chirp 함수와의 곱[Eq.(3)], chirp 함수와의 컨볼루션[Eq.(2)], 다시 chirp 함수와의 곱[Eq.(1)]으로 구현할 수 있으며, Fig. 2는 FrFT 구현 과정을 블록도로 나타낸 것이다.
-차수의 FrFT는 chirp 함수와의 곱[Eq.(3)], chirp 함수와의 컨볼루션[Eq.(2)], 다시 chirp 함수와의 곱[Eq.(1)]으로 구현할 수 있으며, Fig. 2는 FrFT 구현 과정을 블록도로 나타낸 것이다.
LFM 신호는 순시주파수(instantaneous frequency)가 시간에 따라 선형적으로 변화하는 신호로서 레이더 및 소나 시스템에서 표적의 탐지를 위한 송신펄스로 많이 사용되고 있다. 일반적인 LFM 신호는 Eq.(6)과 같이 정의된다.
 , (6)
, (6)
여기서  는 신호 전체의 위상을 나타내며, 이를 시간
는 신호 전체의 위상을 나타내며, 이를 시간  에 대해 미분하고
에 대해 미분하고  로 나눠주면
로 나눠주면  의 순시주파수
의 순시주파수  를 얻을 수 있다. 이때
를 얻을 수 있다. 이때  는chirp rate로서 LFM 신호의 주파수 변화율을 의미하며,
는chirp rate로서 LFM 신호의 주파수 변화율을 의미하며,  는 LFM 신호의 시작 주파수가 된다.
는 LFM 신호의 시작 주파수가 된다.
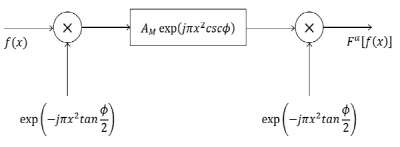
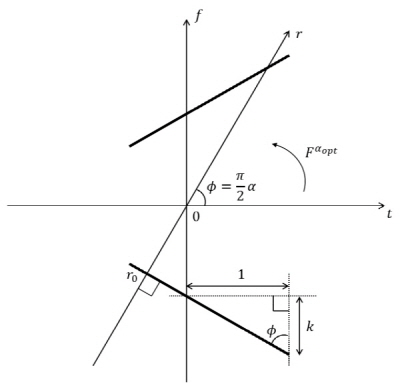
Fig. 3은 fractional 영역에서 chirp rate가  인 LFM 신호와 FrFT 차수와의 관계를 보인 것이다. Fig. 3에서 굵은 선으로 표시한 LFM 신호가 fractional 영역의
인 LFM 신호와 FrFT 차수와의 관계를 보인 것이다. Fig. 3에서 굵은 선으로 표시한 LFM 신호가 fractional 영역의  축 위에서 최댓값을 가지려면 chirp rate에 수직이 되도록
축 위에서 최댓값을 가지려면 chirp rate에 수직이 되도록  축을 회전시켜야 한다. 이때의 회전각도
축을 회전시켜야 한다. 이때의 회전각도  에 대응되는
에 대응되는  값을 최적 변환차수라고 하며,
값을 최적 변환차수라고 하며,  으로 나타낸다. Chirp rate가
으로 나타낸다. Chirp rate가  인 LFM 신호의 최적 변환차수
인 LFM 신호의 최적 변환차수  은 Eq.(10)과 같이 얻을 수 있다.[5,6]
은 Eq.(10)과 같이 얻을 수 있다.[5,6]
 , (7)
, (7)
 , (8)
, (8)
 , (9)
, (9)
 , (10)
, (10)
여기서  및
및  는 각각 LFM 신호의 펄스폭과 대역폭을 의미한다.
는 각각 LFM 신호의 펄스폭과 대역폭을 의미한다.
샘플링주파수가  이고 전체 분석프레임의 길이가
이고 전체 분석프레임의 길이가  샘플일 때, 이산(discrete)영역에서의 chirp rate
샘플일 때, 이산(discrete)영역에서의 chirp rate  와
와  은 Eq.(12)로 표현된다. Eq.(12)를 통해 구한
은 Eq.(12)로 표현된다. Eq.(12)를 통해 구한  에 의해 LFM 신호는
에 의해 LFM 신호는  축 위의 점
축 위의 점  에서 피크 스펙트럼, 즉, 최댓값을 가지게 된다. 피크 스펙트럼을 가지는 이러한 특성으로 인해 잡음이 존재하는 환경에서 FrFT는 기존의 푸리에 변환에 비해 LFM 신호 분석의 경우 보다 더 장점을 가질 수 있게 된다.
에서 피크 스펙트럼, 즉, 최댓값을 가지게 된다. 피크 스펙트럼을 가지는 이러한 특성으로 인해 잡음이 존재하는 환경에서 FrFT는 기존의 푸리에 변환에 비해 LFM 신호 분석의 경우 보다 더 장점을 가질 수 있게 된다.
 , (11)
, (11)
 . (12)
. (12)
III. 표적과의 거리 추정
능동소나 송신기에서 방사된 LFM 신호는 수중의 표적에 의해 반향 되어 수신기로 되돌아온다. 이때 수신된 LFM 신호는 수중 표적의 속도에 의한 도플러 효과로 주파수가 변이되는데, 주파수 변이의 크기는 표적의 속도에 비례하고 수중음속도에 반비례하기 때문에 표적의 속도가 수중음속도에 비해 충분히 작을 경우 주파수 변이를 무시할 수 있다. 도플러 효과에 의한 주파수 변이를 무시할 경우, 표적에 맞고 반향 된 LFM 신호에서 표적과의 거리에 따른 시간지연만을 고려하면 된다. 따라서 수신된 신호 내에서 표적에 맞고 반향 된 LFM 신호를 탐지하여 LFM 신호가 존재하는 구간을 찾아내면 표적과의 거리를 추정할 수 있다.
Fig. 4의 시간-주파수 평면에서 LFM 신호를 송신하고 바로 수신한 신호의 길이를  라고 하고, 그 속에서 표적에서 반사된 LFM 신호의 시작 시간을
라고 하고, 그 속에서 표적에서 반사된 LFM 신호의 시작 시간을  라고 표시하면 표적과의 거리
라고 표시하면 표적과의 거리  는 지연시간
는 지연시간  를 이용하여 Eq.(13)과 같이 구할 수 있다. 여기서
를 이용하여 Eq.(13)과 같이 구할 수 있다. 여기서  는 수중음속도로서 일반적으로 약 1500 m/s이다.
는 수중음속도로서 일반적으로 약 1500 m/s이다.


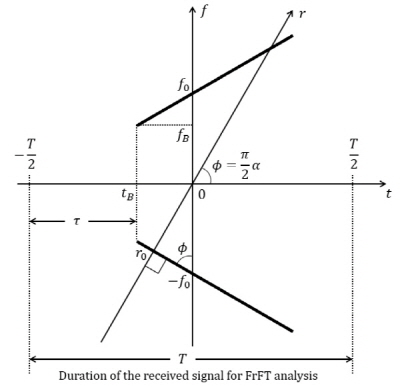
Fig. 4에서, 수신된 신호의 FrFT 스펙트럼으로부터 표적에 반사된 LFM 신호의 시작 시간  를 구하는 과정은 다음과 같다.[7] LFM 신호를 1차 함수
를 구하는 과정은 다음과 같다.[7] LFM 신호를 1차 함수  로 나타내면 Eq.(14)와 같이 쓸 수 있는데, 여기서
로 나타내면 Eq.(14)와 같이 쓸 수 있는데, 여기서  는 LFM 신호의 chirp rate이고,
는 LFM 신호의 chirp rate이고,  는 LFM 신호가
는 LFM 신호가  축과 만나는 값, 즉,
축과 만나는 값, 즉,  일 때의 주파수 값이다.
일 때의 주파수 값이다.
 . (14)
. (14)
실제 표적에 반사된 LFM 신호가  축과 만나지 않을 경우, 즉,
축과 만나지 않을 경우, 즉,  또는
또는  인 구간에 존재할 경우에는 LFM 신호의 연장선이
인 구간에 존재할 경우에는 LFM 신호의 연장선이  축과 만나는 점이
축과 만나는 점이  가 된다. Fig. 4에서
가 된다. Fig. 4에서 이므로 시작 시간
이므로 시작 시간  는 Eq.(15)와 같이 나타낼 수 있다. 여기서
는 Eq.(15)와 같이 나타낼 수 있다. 여기서  는 LFM 신호의 시작 주파수이다.
는 LFM 신호의 시작 주파수이다.
 . (15)
. (15)
Eq.(15)에서 수신된 LFM 신호의  ,
,  ,
,  를 알게 되면 시작 시간
를 알게 되면 시작 시간  를 구할 수 있는데, 도플러 효과를 무시할 경우 수신된 LFM 신호의 chirp rate
를 구할 수 있는데, 도플러 효과를 무시할 경우 수신된 LFM 신호의 chirp rate  와 시작 주파수
와 시작 주파수  는 송신한 LFM 신호와 동일하다고 볼 수 있다. 또한,
는 송신한 LFM 신호와 동일하다고 볼 수 있다. 또한,  는 FrFT 스펙트럼에서 최댓값을 나타내는 점
는 FrFT 스펙트럼에서 최댓값을 나타내는 점  에 대해 Eq.(16)을 적용하여 구할 수 있다. 따라서 Eqs.(15)와 (13)을 이용하여 표적과의 거리를 구할 수 있다.
에 대해 Eq.(16)을 적용하여 구할 수 있다. 따라서 Eqs.(15)와 (13)을 이용하여 표적과의 거리를 구할 수 있다.

IV. 실험 및 검토
4.1 합성 LFM 신호를 이용한 실험
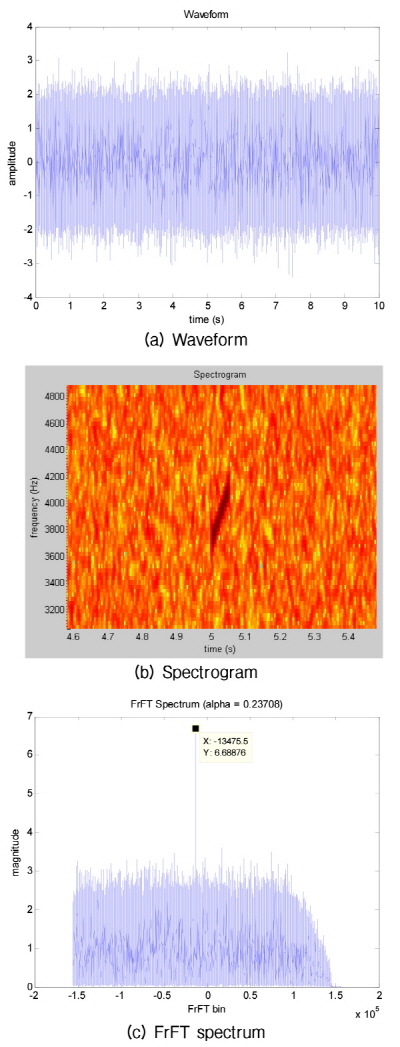
신호 합성을 위한 샘플링주파수는 31.25 kHz로 하고, 펄스폭은 50 ms, 대역폭은 400 Hz, 시작 주파수는 3.7 kHz인 LFM 신호를 합성하였다. PRI(Pulse Repetition Interval)는 10 s로 하여 수신된 신호에서 LFM 신호의 지연시간을 5.0 s로 하였으며,  dB가 되도록 백색잡음을 섞어주었다. Fig. 5(a)와 (b)는 합성된 LFM 신호의 파형과 스펙트로그램을 보인 것이다.
dB가 되도록 백색잡음을 섞어주었다. Fig. 5(a)와 (b)는 합성된 LFM 신호의 파형과 스펙트로그램을 보인 것이다.
FrFT 스펙트럼이 최댓값을 갖도록 하기 위해 먼저 Eq.(12)를 이용하여 최적 변환차수  을 계산하면
을 계산하면  이다. Fig. 5(c)는 최적 변환차수를 이용한 FrFT 스펙트럼을 보여주고 있는데, 스펙트럼 피크 값을 갖는 점은
이다. Fig. 5(c)는 최적 변환차수를 이용한 FrFT 스펙트럼을 보여주고 있는데, 스펙트럼 피크 값을 갖는 점은  임을 알 수 있다. Eq.(16)을 이용해
임을 알 수 있다. Eq.(16)을 이용해  값을 계산하면
값을 계산하면  kHz이며, 표적에서 반사되어 돌아오기까지의 지연시간
kHz이며, 표적에서 반사되어 돌아오기까지의 지연시간  를 Eqs.(15) 및 (13)을 이용해 계산하면
를 Eqs.(15) 및 (13)을 이용해 계산하면  s가 얻어진다. 이처럼 잡음이 강한 환경에서도 LFM 신호의 피크 스펙트럼을 나타내는 FrFT의 특성 때문에 수신된 신호 내에 포함된 LFM 신호의 지연시간을 정확히 추정하는 것이 가능함을 알 수 있다.
s가 얻어진다. 이처럼 잡음이 강한 환경에서도 LFM 신호의 피크 스펙트럼을 나타내는 FrFT의 특성 때문에 수신된 신호 내에 포함된 LFM 신호의 지연시간을 정확히 추정하는 것이 가능함을 알 수 있다.
샘플링주파수는 31.25 kHz, 펄스폭은 50 ms, 대역폭은 400 Hz, 시작 주파수는 3.7 kHz인 LFM 신호, PRI는 13 s로 설정한 능동소나 환경에서 얻어진 빔형성 데이터를 사용하여 표적의 거리 추정 실험을 수행하였다. Fig. 6(a)와 (b)는 빔형성 수신신호의 파형과 스펙트로그램을 보인 것으로, 스펙트로그램 상에서 약 5.5 s 부근에서 표적에 맞고 반향 된 것으로 보이는 LFM 신호와 그 이후에 발생하는 다수의 잔향 신호를 확인할 수 있다.
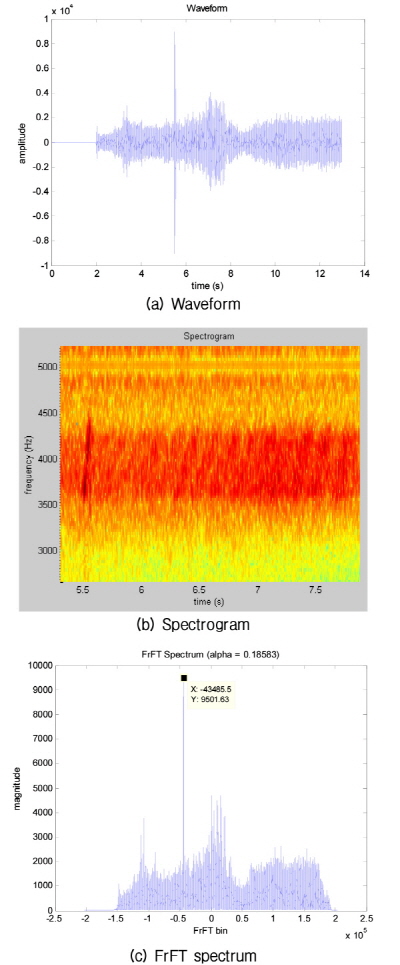
배경잡음 및 잔향을 포함하는 13 s 길이의 수신된 신호에서 표적에서 반사된 LFM 신호구간의 검출 및 표적거리 추정 과정은 다음과 같 다. 먼저 FrFT 스펙트럼 분석을 위해 Eq.(12)를 이용해 최적 변환차수  을 계산한다. Eq.(12)에서
을 계산한다. Eq.(12)에서  ,
,  ,
,  은 송신펄스의 정보를 그대로 사용하는데, 계산된 최적 변환차수는
은 송신펄스의 정보를 그대로 사용하는데, 계산된 최적 변환차수는  이다. Fig. 6(c)는 최적 변환차수를 이용한 수신신호의 FrFT 스펙트럼을 나타낸 것이다. 그 다음, 스펙트럼 피크가 발생하는
이다. Fig. 6(c)는 최적 변환차수를 이용한 수신신호의 FrFT 스펙트럼을 나타낸 것이다. 그 다음, 스펙트럼 피크가 발생하는  값을 구해서 Eq.(16)을 이용하여
값을 구해서 Eq.(16)을 이용하여  값을 구한다음, Eqs.(15) 및 (13)을 이용하여 시간지연 값
값을 구한다음, Eqs.(15) 및 (13)을 이용하여 시간지연 값  를 구한다. 계산된 값은
를 구한다. 계산된 값은  -43485.5,
-43485.5,  s이다. 마지막으로 Eq.(13)에서
s이다. 마지막으로 Eq.(13)에서  1500 m/s의 수중음속도를 이용하여 구한 표적과의 거리
1500 m/s의 수중음속도를 이용하여 구한 표적과의 거리  값은
값은  km이다.
km이다.
Fig. 7은 빔형성 수신신호의 다른 분석 예를 보인 것이다. Fig. 7(b)의 스펙트로그램에서 보면 약 5.75 s 부근에 표적에 의한 반향신호로 추정되는 영역이 보이지만, 6 ~ 8 s 구간에 클러터에 의한 강한 잔향신호들이 존재하여 표적신호의 탐지 및 거리 추정이 어려움을 알 수 있다. Fig. 7(c)의 FrFT 스펙트럼 분석에 의하면 최대 피크는 7.36 s 부근의 잔향에 의해 발생하고, 두 번째 피크는 5.75 s 부근의 표적에 의한 것으로 나타난다. 이러한 특성을 고려하여 FrFT 스펙트럼 분석 시에 피크 2개를 추출하여 지속적으로 표적거리 추정을 할 경우 소나 운용자에게 유용한 클러터에 의한 정보와 표적에 의한 정보를 함께 제공할 수 있을 것으로 생각된다.
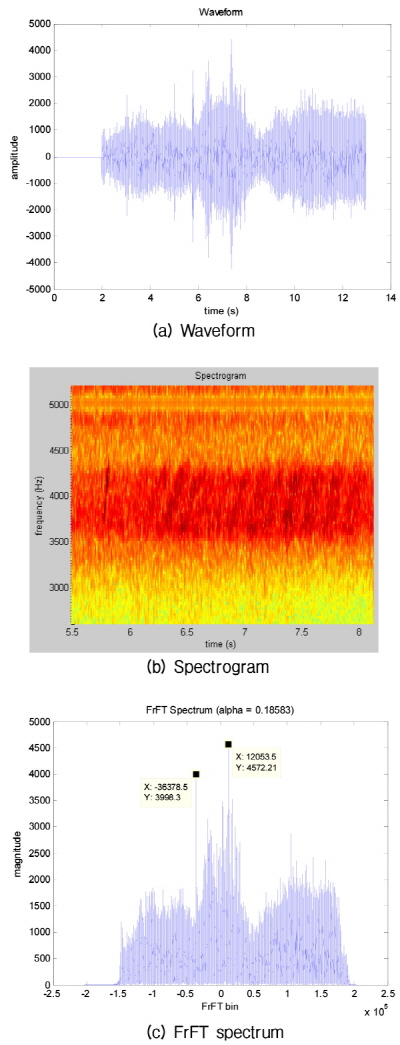
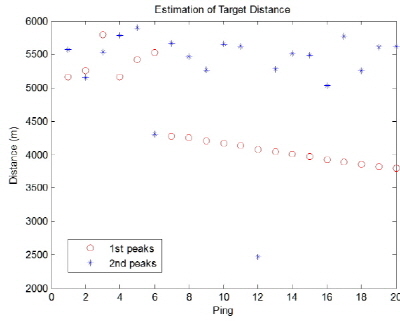
Fig. 8은 빔형성 된 20개의 핑(ping) 수신신호에 대해 연속되는 주기(PRI = 13 s) 마다 FrFT 스펙트럼의 2개 피크를 구하여 표적거리를 추정한 결과를 보인 것이다. 심볼 o는 FrFT 스펙트럼에서 최댓값을 갖는 첫 번째 피크를, *는 두 번째 피크를 이용하여 표적거리를 계산한 결과이다. Fig. 8에서 보면 5번째 수신신호까지는 표적신호의 크기가 배경잡음에 비해 아주 미약하여 클러터에 의한 거리가 추정된 것으로 판단된다. 그러다가 6번째 수신신호에서 FrFT 스펙트럼의 두 번째 피크에서 표적거리가 추정되며, 7번째 수신 신호부터는 첫 번째 피크에서 표적신호가 탐지되어 거의 일정한 속도로 가까워지고 있는 표적임을 알 수 있다. 또한, 임의의 거리에서 랜덤하게 나타나는 클러터의 특성도 함께 볼 수 있다.
V. 결 론
본 논문에서는 능동소나 수신신호의 FrFT 스펙트럼 분석을 통해 표적과의 거리를 추정할 수 있는 새로운 방법을 제안하였다. 능동소나 송신 LFM 신호의 파라미터 정보를 이용해 FrFT의 최적 변환차수를 구한 뒤 수신신호의 FrFT 스펙트럼을 얻고, 스펙트럼의 피크 위치로부터 수신신호 내의 LFM 신호 구간을 검출하고 표적거리를 추정할 수 있는 새로운 알고리즘을 개발하였다. 잡음이 부가된 합성한 LFM 표적신호 및 실제 수중환경 실험에서 얻은 신호를 이용하여 수행한 LFM 구간 검출 실험과 표적거리 추정 실험을 통해 제안한 방법의 타당성을 검증하고, 그 유용성을 확인하였다. 또한, 제안한 방법에서는 표적 및 클러터에 의한 거리정보를 함께 제시할 수 있으므로 소나 운용자에게 보다 유익하게 활용될 수 있으리라 기대된다.
향후 본 연구에서 제안한 FrFT 기반의 방법을 적용한 능동소나 표적 탐지 기법의 개발과 기존의 정합필터 기반의 탐지 성능과의 비교/분석에 대한 연구를 수행하고자 한다. 또한, 표적 또는 자함의 이동시의 도플러 효과로 인한 LFM 신호의 주파수 변이가 FrFT 스펙트럼에 미치는 영향과 이를 고려한 표적의 속도 추정 등에 대한 연구를 수행할 계획이다.
