

I. 서 론
수중에서 목표물의 위치를 탐지하기 위한 수중 감시 시스템 중 하나인 고정형 선 배열은 등 간격 선 배열 등 간격 원형 배열, 등 간격 사각 배열 등이 있다. 배열을 이용한 빔형성 기법들 중 하나인 DAS(Delay-And- Sum)는 배열의 기하학적 구조로 인해 신호원으로부터 발생된 신호가 센서로 입사할 때 발생하는 각 센서간의 지연시간 차이를 이용하여 신호원의 위치를 추정하는 빔형성 기법이다.[1] 그러나 등 간격 선 배열에서는 좌 우의 지연시간이 동일하여 빔패턴이 대칭적으로 형성되기 때문에 좌 우 구분이 어렵다.
이를 해결하기 위해 여러 가지 기법들이 연구되어 왔다.[2-6] 그 중에 하나인 카디오이드(cardioid) 빔형성 기법은 매우 근접한 센서 쌍을 이용하여 카디오이드 빔형성을 통해 좌 우를 구분한다.[2] 그러나 카디오이드 빔형성 기법 중 하나인 90°와 270° 카디오이드 빔형성을 하게 되면 선 배열이 배열 양 끝으로 빔형성을 할 경우 이득감쇄가 발생하게 된다. 또한 후면 빔의 이득이 존재하여 허위표적의 각도에 대한 이득 값으로 인해 좌 우 구분의 모호성이 여전히 존재하게 된다.
좌 우 구분의 모호성을 해결하기 위한 또 다른 기법으로는 비선형 배열을 이용하는 기법이 있다. 고정형 선 배열을 활 형상으로 휘어지게 매설하여 각 센서에 들어오는 신호에 대하여 실 표적과 허위표적에 해당하는 각도에서 지연시간 차이를 발생시킨다. 그 결과로 허위표적의 이득 값이 실 표적에 비해 감소하게 되어 표적의 좌 우를 구별한다.[3-6]
그러나 활 형상 배열에 대한 빔형성 결과는 실표적과 허위표적간의 이득차이가 BTR(Bearing Time Recoding)이나 FRAZ(FRequency Azimuth)와 같은 이미지로 볼 때 좌 우 구분이 명확할 만큼 차이가 나지 않으며, 허위표적에 해당하는 각도에서 이득 값이 줄어들게 되지만 방위각 축에서 이러한 이득 값이 실 표적에 비해 넓게 존재하는 현상이 발생하게 된다. 이러한 이유로 좌 우 구분의 모호성이 여전히 존재하게 된다. 따라서 본 논문에서는 이러한 문제를 해결하기 위해 활 형상 배열의 빔패턴 특징을 이용하여 좌 우 이득 차이를 증폭시킴으로써 좌 우 구분 성능을 향상시키는 기법을 제안한다.
본 논문의 구성은 다음과 같다. II절의 시스템 모델에서 비선형 형상 배열 중 활 형상 배열에 대한 DAS 빔형성 기법을 설명 한 후 III절에서 빔패턴의 허위표적에 해당하는 후엽의 빔 폭을 이용하여 좌 우 이득차이를 증폭시키는 기법을 제안한다. IV절의 전산 모의실험을 통해 제안된 방법의 검증 및 성능 개선 정도를 보이고 V절에서 결론을 맺는다.
II. 시스템 모델
센서간의 거리가 d이고 N개의 센서로 이루어진 활 형상 배열에서의 원거리 음장 DAS 빔형성 기법은 배열의 각 센서에 들어오는 신호의 지연시간을 이용하여 목표물의 위치를 탐지한다. DAS 빔형성 구조를 Fig. 1에 도식화하였다.
신호원으로부터 발생되어 배열의 입력이 되는 신호를  라 하고 다음 식으로 표현된다.
라 하고 다음 식으로 표현된다.
 , (1)
, (1)
여기서  는 신호의 주파수이고
는 신호의 주파수이고  는 수신 세기이다. 신호가 들어올 때 배열의 각 센서는 개별적으로 신호를 수신하게 된다. 입력 신호
는 수신 세기이다. 신호가 들어올 때 배열의 각 센서는 개별적으로 신호를 수신하게 된다. 입력 신호  에 대해 배열의 n번째 센서에 수신된 신호
에 대해 배열의 n번째 센서에 수신된 신호  는 다음과 같다.
는 다음과 같다.
 , (2)
, (2)
여기서  는 잡음이고
는 잡음이고  는 신호가 입사각
는 신호가 입사각  로 들어올 때 첫 번째 센서 대비 n번째 센서의 지연시간이다. 원거리 음장 가정에서는 신호원으로부터 발생된 신호가 평면파가 되어 배열로 들어오게 되므로 n번째 센서의 지연 시간
로 들어올 때 첫 번째 센서 대비 n번째 센서의 지연시간이다. 원거리 음장 가정에서는 신호원으로부터 발생된 신호가 평면파가 되어 배열로 들어오게 되므로 n번째 센서의 지연 시간  는 활 형상 배열의 기하학적인 구조에 의해 다음 식으로 계산할 수 있다.
는 활 형상 배열의 기하학적인 구조에 의해 다음 식으로 계산할 수 있다.
 , (3)
, (3)
여기서  는 음파의 속력이고
는 음파의 속력이고  는 배열의 n번째 센서 위치이며 센서의 위치 정보를 알고 있어야 적용할 수 있다. 고정형 선 배열에서는 매설된 센서의 위치를 Eq. (3)에 적용함으로써 입사각 θ에 대한 활 형상 배열의 지연시간을 얻는다. Eq. (3)으로부터 얻은 지연 시간을 이용하여 각 센서에서 수신된 신호들에 대해 지연된 시간 차이를 보상한 후 더함으로써 빔형성을 한다. 그러나 신호의 입사각을 알 수 없으므로 전 방위에 대하여 Eq. (3)으로부터 계산한 지연시간을 통해 수신 빔형성기 출력 파워를 아래와 같이 구할 수 있다.
는 배열의 n번째 센서 위치이며 센서의 위치 정보를 알고 있어야 적용할 수 있다. 고정형 선 배열에서는 매설된 센서의 위치를 Eq. (3)에 적용함으로써 입사각 θ에 대한 활 형상 배열의 지연시간을 얻는다. Eq. (3)으로부터 얻은 지연 시간을 이용하여 각 센서에서 수신된 신호들에 대해 지연된 시간 차이를 보상한 후 더함으로써 빔형성을 한다. 그러나 신호의 입사각을 알 수 없으므로 전 방위에 대하여 Eq. (3)으로부터 계산한 지연시간을 통해 수신 빔형성기 출력 파워를 아래와 같이 구할 수 있다.
 . (4)
. (4)
활 형상 배열에서는 휘어진 정도가 클수록 실 표적에 해당하는 각도에 대한 지연시간과 허위표적에 해당하는 각도에 대한 지연시간 사이의 차이가 커져서 좌 우 이득차이가 커지게 된다. 그러나 휘어진 정도가 증가 될수록 배열의 길이는 줄어들어 배열 양 끝에 놓이게 되는 신호원들이 기존 보다 많아지게 되므로 탐지 범위가 줄어들게 된다. 그러므로 시스템 상에서 요구되는 탐지범위에 맞게 휘어진 정도를 조정해야하며 이는 활 형상 배열을 통해 얻을 수 있는 좌 우 이득차이가 한정적임을 의미한다.
활 형상 배열의 빔패턴은 허위표적의 배열 이득이 해당 각도에서 넓게 존재하는 현상을 갖는다. 이러한 현상은 좌 우 이득차이가 작을 때 더욱 심화되며 좌 우 구분의 모호성을 더욱 증대시킨다. 따라서 본 논문에서는 이러한 문제를 해결하기 위해서 좌 우 이득차이를 증대시키는 기법을 제안한다.
III. 제안된 방법
활 형상 배열에서 빔형성 하고자 하는 각도에서의 빔 폭은 배열의 센서 개수에 반비례한다. 따라서 센서 개수가 많을수록 좁은 범위의 각도에서 이득 값이 나타나게 된다. 그러나 허위표적의 경우는 활 형상 배열이 휘어진 정도에 비례하여 빔 폭이 결정되며 실 표적에 비해 허위표적의 이득이 해당 각도에서 넓게 존재하는 특징을 갖고 있다.
Fig. 2는 활 형상 배열의 빔패턴 특징을 나타낸 예로 신호가 90°에서 들어올 때의 빔패턴이다. 실 표적의 이득 값은 89° ~ 91° 사이인 비교적 좁은 구간에 존재하며 허위표적의 이득 값은 230° ~ 310° 사이인 실 표적과 비교해 넓은 구간에 존재한다. 방위각을 시간 축으로 바꾸어 생각한다면 허위표적은 실 표적 빔패턴에 비해 완만하게 변화 하므로 주파수 관점에서 보면 저주파수 성분으로 간주 될 수 있다. 따라서 빔패턴에서 저주파수 성분으로 가정한 허위표적을 고주파수 성분으로 가정된 실 표적으로 부터 제거할 수 있다면 실 표적만 남아 있게 되므로 좌 우 구분의 모호성을 제거할 수 있다.
본 논문에서는 방위각을 시간 축으로 변환하여 허위표적의 주파수를 추정하여 허위표적을 제거함으로써 좌 우 구분 성능을 향상시키는 빔패턴 주파수 분해 기법(Beam pattern Frequency Division, BFD)을 제안하며 제안된 방법의 블록선도를 Fig. 3에 나타내었다.
활 형상 배열에서 DAS 빔형성 기법을 통해 빔형성 기법을 통해 빔형성기 출력 파워  을 얻는다. 앞서 설명하였듯이 빔형성기 출력 파워
을 얻는다. 앞서 설명하였듯이 빔형성기 출력 파워  는 허위표적이 퍼지는 특징을 갖고 있으므로 저주파수 성분을 추정하여 이를 제거하여야 한다.
는 허위표적이 퍼지는 특징을 갖고 있으므로 저주파수 성분을 추정하여 이를 제거하여야 한다.
허위표적의 저주파수 성분은 후엽의 빔 폭으로부터 계산한다. Fig. 3의 블록선도에서 Back-lobe x-dB BW은 허위표적에 해당하는 각도의 이득 값으로 부터 x-dB 만큼 감소된 빔패턴의 빔 폭을 의미한다. 여기서 얻은 빔 폭을  라고 하면 허위표적에 대한 주파수는 다음과 같이 추정된다.
라고 하면 허위표적에 대한 주파수는 다음과 같이 추정된다.
 , (5)
, (5)
Eq. (5)에서 얻은 허위표적의 주파수를 고역 통과 필터의 차단 주파수로 설정하여 필터를 설계하고 이를  라 한다.
라 한다.
DAS 빔형성을 통해 얻은 빔형성기 출력 파워  와 Eq. (5)을 통해 얻은 허위표적의 주파수를 이용하여 설계한 고역 통과 필터에 통과시키면 저주파수 성분으로 가정한 허위표적을 제외한 실 표적을 추정할 수 있으며 실 표적의 빔형성기 출력 파워
와 Eq. (5)을 통해 얻은 허위표적의 주파수를 이용하여 설계한 고역 통과 필터에 통과시키면 저주파수 성분으로 가정한 허위표적을 제외한 실 표적을 추정할 수 있으며 실 표적의 빔형성기 출력 파워  는 다음 식으로 표현된다.
는 다음 식으로 표현된다.
 . (6)
. (6)
위 식으로부터 저주파수 성분을 소거함으로써 허위표적이 제거되고 실 표적만 남게 되어 좌 우 구분의 모호성을 제거한다.
IV. 전산 모의실험
앞서 좌 우 구분의 모호성을 제거하기 위해 활 형상 배열에 대하여 DAS 빔형성 기법을 수행하고 DAS 빔형성을 통해 얻은 빔형성기 출력 파워로부터 허위표적을 제거하는 방법을 제안하였다. 본 절에서는 제안된 방법을 검증하기 위한 전산 모의실험을 수행하였으며 실험환경은 Table 1에 나타내었다.
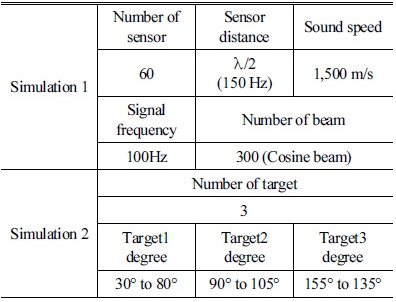
첫 번째 실험은 다음 순서로 진행한다. 원거리 표적이 0°에서 90°로 이동할 때, 등 간격 선 배열과 활 형상 배열에 대해 DAS 빔형성의 결과를 BTR을 통해 보인다. 활 형상 배열에 대하여 90°에서 얻어진 빔패턴을 통해 차단주파수를 구한 뒤 제안된 방법을 적용한 결과를 BTR을 통해 보인다.
두 번째 실험은 활 형상 배열에서 움직이는 다중 원거리 표적에 대하여 제안된 방법의 적용 전 후를 BTR을 통해 비교한다.
Fig. 4는 첫 번째 실험의 등 간격 선 배열과 활 형상 배열을 나타내었다. 활 형상 배열의 곡률을 기준 센서인 원점에 위치하는 센서로부터 y축 방향으로의 차이로 나타내고 10 m 차이가 나도록 구성하였다.
Fig. 4.
(a) Uniform Line Array (ULA), N = 60, d =  ,
,
frequency = 150 Hz. (b) bow array, N = 60, d =  , frequency = 150 Hz, height = 10 m.
, frequency = 150 Hz, height = 10 m.
Fig. 5는 Fig. 4(a)에 나타낸 등 간격 선 배열에 대하여 DAS 빔형성을 수행하여 얻은 BTR을 나타낸 것이다. 실 표적에 해당하는 각도에서 35.6 dB의 이득 값을 갖고 허위표적에 해당하는 각도에서 동일한 이득인 35.6 dB를 갖는다. 실 표적과 허위표적이 대칭적으로 존재하고 좌 우 이득차이가 존재하지 않으므로 좌 우 구분이 어려움을 알 수 있다.
Fig. 6은 Fig. 4(b)에 나타낸 활 형상 배열에 대한 BTR이다. 등 간격 선 배열의 BTR인 Fig. 5와 비교하였을 때 허위표적에 해당하는 각도에서 이득차이가 존재함을 알 수 있다. 실 표적에 해당하는 각도에서는 등 간격 선 배열과 동일하게 35.6 dB의 이득을 갖고 허위표적에서는 최소 26.7 dB, 최대 35.6 dB 그리고 평균 29.6 dB의 이득을 갖는다. 배열 양 끝 부분을 제외한 각도에서 좌 우 이득차이가 존재하며 최소 0 dB, 최대 8.9 dB 그리고 평균 6 dB 만큼 등 간격 선 배열에 비해 좌 우 구분 성능이 향상되었음을 볼 수 있다. 그러나 활 형상 배열의 빔형성기 출력 파워는 Fig. 6에서 보는바와 같이 허위표적의 빔 이득이 넓은 각도에 존재하여 좌 우 구분의 모호성이 존재한다. 표적의 위치가 90°에 있을 경우 허위표적인 260~280°에서도 신호가 검출되어 270°에 근거리 표적이 존재한다고 판단할 수 있음을 알 수 있다.
본 논문에서 제안한 방법의 성능평가를 위해 전산 모의실험을 수행한다. Table 2는 Fig. 4(b)에 나타낸 높이 10 m 활 형상 배열에 대하여 원거리 표적이 90°에 있는 경우에 대한 빔패턴의 허위표적인 3 dB, 6 dB, 9 dB 후엽 빔 폭을 나타낸 것이다. 고역 통과 필터의 차단주파수를 설정하기 위하여 이 값들을 Eq. (5)에 대입한다. 본 논문에서는 계산된 차단주파수와 감쇠비 -20 dB를 갖는 Chebyshev 필터를 사용하였다. 설계된 고역 통과 필터를 사용하여 Eq. (6)을 통해 허위표적을 제거하고 실 표적을 추정한다.

Fig. 7은 제안된 방법의 기준인 원거리 표적이 90°에 위치하였을 때의 빔패턴을 설계된 고역 통과 필터에 통과시켜 실 표적을 추정한 결과이다. 실선은 기존의 DAS 결과를 나타낸 것이고 대시는 3 dB 후엽 빔 폭을 이용하여 실 표적을 추정한 것이다. 제안된 방법을 적용하기 전의 좌 우 이득차이인 8.9 dB에서 19 dB로 이득차이가 증가하여 10.1 dB 만큼 이득이 발생하여 좌 우 구분 성능이 개선된다.
 for bow array, incident degree = 90°.
for bow array, incident degree = 90°.Fig. 8은 6 dB 후엽 빔 폭으로 제안한 방법을 수행하여 얻은 결과이다. 실선은 기존의 DAS 결과를 나타낸 것이고 대시는 6 dB 후엽 빔 폭을 이용하여 실 표적을 추정한 것이다. 제안된 방법의 적용으로 9.7 dB 만큼 좌 우 이득차이가 증가한다. 그러나 78° ~ 80° 그리고 101°~103°에 해당하는 부엽 레벨이 증가하여 성능이 떨어진다. Figs. 7과 8을 비교하면 3 dB 후엽 빔 폭을 이용한 결과는 6 dB 후엽 빔 폭을 이용한 결과에 비해 부엽 성능에 영향을 덜 미치는 것을 확인 할 수 있다.
 for bow array, incident degree = 90°.
for bow array, incident degree = 90°.Fig. 9는 원거리 표적이 0°~90°에 존재할 때 제안된 방법을 적용하여 좌 우 구분 성능이 개선된 정도를 나타낸 것이다. 고역 통과 필터는 원거리 표적이 90°에 존재할 때 빔패턴의 3 dB, 6 dB, 9 dB 후엽 빔 폭을 이용하여 설계한 것을 사용한다. 활 형상 배열의 기하학적 구조로 인해 0°~90°와 90°~180°의 빔패턴은 서로 대칭이다. 원거리 음장에서의 지연시간은 Eq. (3)에 의해 결정되는데 0°~180°와 180°~360°의 경우에는 서로 180°만큼 차이 나므로 해당 각도에서는 부호가 반대이고 동일한 지연시간이 계산된다. 그 결과 위상이 180° 차이 나고 동일한 이득을 얻으므로 해당각도에서는 대칭적인 빔패턴이 얻어진다. 따라서 원거리 표적이 0°~90°인 경우에 대하여 좌 우 구분 성능을 분석한다. 역삼각형 마커는 3 dB, 사각형 마커는 6 dB 그리고 원형 마커는 9 dB 후엽 빔 폭을 이용한 결과이다. 3 dB, 6 dB, 9 dB 후엽 빔 폭을 이용한 결과 중 35°~49°를 제외한 구간에서 3 dB 후엽 빔 폭을 이용하여 제안된 방법을 수행하였을 때의 좌 우 구분 성능이 제시된 것 중 가장 우수하며 평균 이득 값은 각각 8.1 dB, 7.9 dB, 7.8 dB이다.
Fig. 10은 Fig. 6에 나타낸 활 형상 배열의 BTR을 3 dB 후엽 빔 폭을 이용한 제안된 방법을 수행한 결과를 BTR로 나타낸 것이다. 배열 양 끝 부분 외의 각도에서 허위표적이 제거되어 좌 우 구분 모호성이 Fig. 6에 비해 개선되었음을 확인할 수 있다.
 for bow array.
for bow array.Fig. 11은 두 번째 실험인 활 형상 배열에서 움직이는 다중 원거리 표적에 대한 DAS 빔형성 결과의 BTR이다. 첫 번째 표적은 30°에서 80°, 두 번째 표적은 90°에서 105° 그리고 마지막 표적은 155°에서 135°로 이동한다. 첫 번째 표적에 대한 허위표적이 330°에서 280°로 실 표적에 비해 넓은 각도에서 존재하여 발생하고 두 번째, 세 번째 표적에 대한 허위표적도 실 표적과 대칭인 각도에서 실 표적에 비해 넓은 각도에서 이득이 존재한다. 따라서 첫 번째와 세 번째 표적의 허위표적은 활 형상 배열로부터 원거리에서부터 근접해오는 신호로 판단할 수 있으며 두 번째 표적의 허위표적은 근접해 있는 신호로 판단 할 수 있다.
Fig. 12는 Fig. 11에 나타낸 활 형상 배열의 BTR을 3 dB 후엽 빔 폭을 이용한 제안된 방법을 수행한 결과를 BTR로 나타낸 것이다. Fig. 10에서 허위표적의 이득을 줄임으로써 좌 우 구분의 모호성이 Fig. 10에 비해 개선되었음을 확인할 수 있다.
 for bow array.
for bow array.V. 결 론
활 형상 배열의 DAS 빔형성 결과는 실 표적에 해당하는 각도에서의 이득과 허위표적에 해당하는 각도에서의 이득간의 차이가 크지 않으며 허위표적에 해당하는 이득 값이 실 표적에 비해 여러 각도에서 퍼져 보이기 때문에 좌 우 구분의 모호성이 존재한다. 그러나 방위각을 시간 축으로 바꾸면 넓은 각도에서 퍼져 보이는 허위표적은 저주파수 성분으로 가정될 수 있고 좁은 각도에서 이득 값을 갖는 실 표적은 고주파수 성분으로 가정될 수 있다. 따라서 후엽 빔 폭으로부터 추정한 허위표적의 저주파수 성분을 DAS 결과로 얻은 빔패턴으로 부터 제거함으로써 실 표적을 추정한다. 제안된 방법의 결과로 좌 우 이득차이가 기존보다 증가되어 좌 우 구분 성능이 개선된다. 이를 보이기 위해 전산 모의실험을 통해 허위표적을 제거하는 실험을 수행하였다. 원거리 표적이 0°~90°에 존재할 때 기존의 좌 우 이득차이는 최대 8.9 dB, 평균 6 dB이다. 제안된 방법을 적용한 결과 좌 우 이득차이를 최대 10.1 dB, 평균 8.1 dB 만큼 증가시켜 좌 우 구분 성능이 개선됨을 검증하였다.
