

I. Introduction
II. The Doppler Effect
III. Curve-Fitting by a Sigmoid
IV. Analysis for an Actual F1 Sound
V. Conclusions
I. Introduction
The official name of the ‘Formula One’ (or ‘Formula 1’ (or ‘F1’ in short)) is an acronym for ‘FIA Formula One World Championship’ and refers to the car racing, which is administered by the organization of ‘Fédération Internationale de l’Automobile (FIA). Here, ‘Formula’ means a set of requirements for the car (called machine) to satisfy.[1]
Historically, the earliest racing is traced back to 1920 when the ‘Grand Prix Motor Racing’ was held in Europe.[2] However, it is acknowledged that the first official formula was set up in 1946 and the first racing was held in 1947. Next, the worldwide championship was first open in 1950’ Silverstone racing in England and is continued up to date.
The winner is determined in a peculiar way. Only 24 racers are entitled to drive the machine and the 12 teams composed of them do the racing all around the world. The team of the highest accumulated score wins the championship.
A fancy expression of the marvelous feature for the F1 racing is “watch the sound!” which is spoken by a specialist in this field. The roaring and thundering sounds of the competing machines are impressive and unforgettable.
While the attractive feature of the tolling bell is in its beats, the wonderful aspect of the F1 sounds is in the Doppler effect: the pitch decreases dramatically as the machine bypasses the listener. Along with this frequency shift, the acoustic level change is accompanied as the machine approaches and recedes away. Considering the speed of the machines, all the changes occur in a very short time interval and the effect is as much drastic.
Organization of this paper is as follows. In section II, the Doppler effect will be reviewed for a general case in the sense that the listener is away from the rectilinear path of the machine’s motion. In section III, numerical investigations will be performed to draw expressions of the frequency as functions of time and the machine location. It will be revealed that a sigmoid function of tanh is reasonably good. After providing an application of the developed theory in this paper to the actual F1 machine’s sound in section IV, concluding remarks will be given in section V finally. Table 1 is the list of the variables and their meanings that will be used in this paper.













 -th wavefront
-th wavefront


II. The Doppler Effect
Though the stereo sound with two channels is more realistic and enriching, we will consider one-channel mono sound for the sake of simplicity of theoretical analysis. Fig. 1 shows an arrangement where a listener is located at a point
 ,
,on the  axis and the F1 machine is moving along the
axis and the F1 machine is moving along the  axis at a constant speed
axis at a constant speed  while generating a sound of peak frequency
while generating a sound of peak frequency  .
.
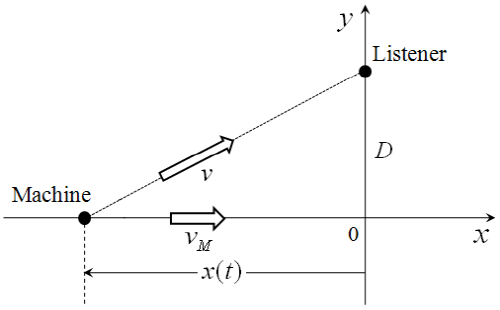
It is worth of note that the speed of sound,  , is independent of the motion of the sound source. Instead, it is determined in terms of the physical properties of the medium, i.e. air, and its value is about 340 m/s at atmospheric pressure and temperature of 15℃.[3]
, is independent of the motion of the sound source. Instead, it is determined in terms of the physical properties of the medium, i.e. air, and its value is about 340 m/s at atmospheric pressure and temperature of 15℃.[3]
At time  , the coordinate of the machine is given by
, the coordinate of the machine is given by
 ,
,where  is the its initial position. We divide this equation by
is the its initial position. We divide this equation by  to obtain
to obtain
 ,
,where the following quantities were defined:
 ,
, ,
, ,
, .
.These ‘scaled’ (dimensionless) variables allow us to extract results that are independent of the specific values of the distance  and the frequency
and the frequency  . At time
. At time  , the distance from the listener to the machine is given by
, the distance from the listener to the machine is given by
 ,
,where  is the machine-to-listener distance.
is the machine-to-listener distance.
At times
 ,
,the machine is located at
 ,
,and emits the  -th wavefront. At those discrete times given by (1), the machine-to-listener distance is
-th wavefront. At those discrete times given by (1), the machine-to-listener distance is
|
Fig. 2. The frequency felt by the listener |
 vs. the location
vs. the location  of the machine at the instant when the listener senses that frequency. The Mach number was taken to be
of the machine at the instant when the listener senses that frequency. The Mach number was taken to be  .
. .
.The time of travel of the  -th wavefront from the machine to the listener is given by
-th wavefront from the machine to the listener is given by
 ,
,where a parameter
 ,
, was defined. The time at which the listener senses the  -th wavefront is then given by the sum of (1) and (2):
-th wavefront is then given by the sum of (1) and (2):
 .
.The frequency of the sound felt by the listener is given by the inverse of the time interval of the consecutive wavefronts:
 .
.At the instant the listener senses this frequency, the machine is located at
 ,
,where the ratio
 .
.denotes the machine’s Mach number.
Eq. (5) tells that, at the instant the listener senses the  -th wavefront, the machine is located at the position advanced by
-th wavefront, the machine is located at the position advanced by  from the position of the emission of the
from the position of the emission of the  -th wavefront. Fig. 2 shows the frequency felt by the listener [Eq. (4)] vs. the location of the machine at the instant when the listener senses that frequency [Eq. (5)]. The Mach number was taken to be
-th wavefront. Fig. 2 shows the frequency felt by the listener [Eq. (4)] vs. the location of the machine at the instant when the listener senses that frequency [Eq. (5)]. The Mach number was taken to be  , which corresponds roughly to
, which corresponds roughly to  . The overall feature ofFig. 2 is in qualitative agreement with the work of Lee and Wang.[4]
. The overall feature ofFig. 2 is in qualitative agreement with the work of Lee and Wang.[4]
For the wavefront that the machine emits at the position  , the listener does not feel frequency shift and thus senses the frequency
, the listener does not feel frequency shift and thus senses the frequency  and, at that moment of sensing that wavefront, the machine is located at the position
and, at that moment of sensing that wavefront, the machine is located at the position  , the coordinate of which is marked by a dot in the graph.
, the coordinate of which is marked by a dot in the graph.
The two frequencies
 ,
, .
.denote the cases of the longitudinal Doppler shifts ( ) for the machine to approach towards [Eq. (6)] and recede away from [Eq. (7)] the listener, respectively.[5] In this case, the frequency perceived by the listener shows abrupt change from
) for the machine to approach towards [Eq. (6)] and recede away from [Eq. (7)] the listener, respectively.[5] In this case, the frequency perceived by the listener shows abrupt change from  to
to  as the sound source passes by him. This case differs from Fig. 2 in that the shape of the frequency change is given by a Heaviside (step) function, rather than a graded one.
as the sound source passes by him. This case differs from Fig. 2 in that the shape of the frequency change is given by a Heaviside (step) function, rather than a graded one.
|
Fig. 3. The objective function |
|
Fig. 4. The value of |
 vs. the parameter
vs. the parameter  for
for  .
.
 for the best fit vs. the Mach number
for the best fit vs. the Mach number  .
.The other two dotted lines in Fig. 2 represent the frequency of the machine
 ,
,and the arithmetic mean of  and
and  , i.e.,
, i.e.,
 .
.III. Curve-Fitting by a Sigmoid
The curve of Fig. 2 has the shape of a graded step function which is antisymmetric with respect to  and converges towards two extreme values at both ends. To represent this curve by a sigmoid function, we consider
and converges towards two extreme values at both ends. To represent this curve by a sigmoid function, we consider
|
Fig. 5. Plot of the data |
|
Fig. 6. The same result as Fig. 5 with the physical values of |
 vs.
vs.  for
for  and the curve-fitting by Eq. (9).
and the curve-fitting by Eq. (9).
 and
and  instead of scaled ones.
instead of scaled ones. ,
,where  and
and  are adjustable parameters for the best fit.
are adjustable parameters for the best fit.  can be fixed from the constraint
can be fixed from the constraint
 ,
,and we] get
 .
.To obtain  , we consider an objective function
, we consider an objective function
 ,
,where  and
and  are given by Eqs. (4) and (5), respectively.
are given by Eqs. (4) and (5), respectively.  is then determined by
is then determined by
 .
.Fig. 3 shows the objective function  vs. the parameter
vs. the parameter  for
for  . It decreases as
. It decreases as  , reaches the minimum, and then grows.
, reaches the minimum, and then grows.
The value of  for the best fit depends on
for the best fit depends on  . Fig. 4 shows the result. A curve-fitting by a second order polynomial gives
. Fig. 4 shows the result. A curve-fitting by a second order polynomial gives
 .
.Collecting the results, Eq. (8) might be written as
 .
.which represents the frequency felt by the listener as a function of the machine’s location at the instant of frequency sensing. This expression is notable in that it includes only one parameter  . Fig. 5 is an example of the curve-fitting by Eq. (9) for
. Fig. 5 is an example of the curve-fitting by Eq. (9) for  .
.
Fig. 6 shows the same result as Fig. 5 with the physical values of  and
and  , the standard tuning frequency, instead of scaled ones.
, the standard tuning frequency, instead of scaled ones.
The frequency felt by the listener vs. the time of frequency sensing, i.e. Eq. (4) vs. Eq. (3), is plotted in Fig. 7. It has also the shape of a graded step function.
Similarly to Eq. (9), we try modelling of this curve by
 .
.where  is a parameter to be adjusted for the best fit and
is a parameter to be adjusted for the best fit and  is the time when the frequency has the value
is the time when the frequency has the value  . Fig. 8 shows the curve-fitting result for
. Fig. 8 shows the curve-fitting result for  .
.
We see that the frequency felt by the listener vs. the time of frequency sensing might also be represented by the tanh function reasonably well. A universal expression for  such as (9) is not allowed due to unavailability of the general expression for the time
such as (9) is not allowed due to unavailability of the general expression for the time  and thus it will not be pursued further in this paper.
and thus it will not be pursued further in this paper.
IV. Analysis for an Actual F1 Sound
Fig. 9 shows a part of the sound of the Ferrari machine in the ‘2009 FIA WTCC Race of Italy’.[6]
Fig. 10 is an enlarged view of the section ‘A’ of Fig. 9. The number of data points is 1,024 for FFT and the time duration is 64ms. Fig. 11 is the FFT for the data of Fig. 10.
|
Fig. 7. The frequency felt by the listener vs. the time of frequency sensing for |
|
Fig. 8. The frequency felt by the listener vs. the time of frequency sensing for |
 .
.
 and its curve- fitting result.
and its curve- fitting result.For most of the analysis frames consisting of 1,024 data points, the peak frequency (PF) can be identified clearly as in Fig. 11. However, it is not always the case. Fig. 12 and Fig. 13 show the FFT results for the sections of ‘B’ and ‘C’ of Fig. 9.
The PFs may come from other sources than the engine. For an example, noises from muffler, tire, and wind might intervene the F1 sound of our interest.[7] If these are the cases, separation of the sound sources might be useful by independent component analysis.[8]
The PFs of Fig. 12 and Fig. 13 correspond to the third and second harmonics of Fig. 11, respectively, with some minor numerical deviation. It is not easy, though not impossible, to set up a numerical criterion for treatment of these harmonics in an automatic fashion.
Fig. 14 shows PF profile for Fig. 9 in continuous manner by picking up the PF for each analysis frame consisting of 1,024 data points.
The overall feature shows a graded step function with some undesirable pulse-like peaks coming from harmonics. These unwanted peaks might be corrected by identifying the harmonics, but we discard the undesirable high frequency peaks above 1 kHz. The result is shown in Fig. 15. We see that the overall feature is similar to Fig. 8.
|
Fig. 15. A corrected version of Fig. 14. The PFs above 1 kHz were discarded. |
|
Fig. 16. Continuous profile of the peak frequency vs. time of frequency sensing and its curve-fitting result. |
The extreme values of the frequency on the left and right side were estimated to be
 ,
, .
.By applying Eqs. (6) and (7) to these values, we obtain
 ,
, .
.To compare experimental data with the theory developed in this paper, we try to fit the data of Fig. 15 by a sigmoid function
 ,
,with two adjustable parameters  and
and  . From Eq. (11), we have
. From Eq. (11), we have  and
and  is estimated to be
is estimated to be
 ,
,from the condition
 .
.Adjustment of  is done by the least-square scheme as before, the result being
is done by the least-square scheme as before, the result being
 .
.Fig. 16 shows the result.
We see that the experimental data is in reasonable agreement with the theoretical fit. All in all, the frequency sensed by a listener a distance away from the path of rectilinear movement of the sound source might be represented by a sigmoid function.
V. Conclusions
In this paper, we analyzed the sound generated from F1 machine by the Doppler effect. For the case the listener is away from the rectilinear path of the F1 motion, the frequency shift felt by him was derived as functions of time and machine location. The result was found to be graded step function. From numerical analyses, it was shown that the function was described by tanh sigmoid function reasonably well.
In order to apply the theory to the actual F1 machine sound, FFT (Fast Fourier Transform) was performed on the Ferrari engine sound. The peak frequencies were estimated with exclusion of the high frequency harmonics. From the two asymptotic frequencies for approaching and receding cases, the intrinsic frequency of the engine and the speed of the machine were obtained.
