

I. 서 론
II. 쿼드콥터의 음향 특성 분석
2.1 실험 구성
2.2 드론 움직임 상태에 따른 음향특성
2.3 드론 종류에 따른 음향 특성
III. 다수의 드론 음원 위치 추정법
3.1 블레이드 통과 주파수 추정
3.2 로터 공간 군집화 및 드론 음원 재현
IV. 위치 추정 시뮬레이션
V. 결 론
I. 서 론
드론은 가볍고 조종이 용이하며 공중에서 빠르게 이동할 수 있는 특징을 가지며, 멀티콥터 제어 기술이 발전함에 따라 무인항공기를 활용하는 시장이 넓어졌다. 근래에는 일반인들도 사진 및 동영상 촬영 등 개인 여가활동에 드론을 많이 사용하고 있으나, 드론을 이용하여 사생활을 침해하거나 범죄에 사용하는 등 드론의 특징을 악용하는 사례도 점점 많아지고 있으며,[1] 국내에서는 이를 방지하기 위해 항공안전법에 드론 불법 비행에 대한 처벌 조항을 명시하여 법적인 제재를 하고 있다. 또한 드론 활용도 증가에 따른 문제를 방지하기 위해서, 미상의 드론을 추적하거나 재밍을 통해 드론을 무력화시키는 안티드론 기술, 드론 포렌식 기술 등이 개발되고 있다.[2,3,4]
한편, 드론은 일반적인 항공기에 비해 크기가 작고 무인으로 조종이 가능하다는 장점 때문에 예로부터 군사적인 용도로 사용되었다. 그러나 드론은 0.01 m2 미만의 작은 레이더 단면적을 가지므로,[5] 일반적인 레이더 시스템 또는 광학장비로는 이러한 초소형의 비행체를 탐지하기 어려운 문제가 있다. 따라서 양상태 레이더와 같은 시스템 또는 다중 물리 센서로부터 받은 정보를 융합하여 드론의 위치를 추정하는 기술이 시도되고 있다.[6]
음향 기반의 위치 추정법은 장애물로 인해 시야가 가려지더라도 탐지가 가능하고, 추정 시스템에서 전자파와 같은 파동 신호를 송신하지 않아도 되는 장점이 있다. 드론은 추력을 얻기 위해 다수의 로터를 사용하며 이로 인한 공력소음이 필수적으로 발생하며, 여기서 사용되는 모터 및 블레이드의 종류에 따라 드론의 음향 특성이 결정된다.[7] 따라서 드론의 음향 특성을 기반으로 한 드론 위치 추정 관련된 연구들이 진행되었다.[8,9,10,11]
본 논문에서는 쿼드콥터 드론의 음향특성을 활용하여 다수의 드론 위치를 추정하는 방법에 대해 설명한다. 드론의 음향 특성을 분석하기 위해, 드론 움직임 상태 및 드론 종류에 따른 음향 측정을 통해 실험적 분석을 수행하였다. 최종적으로, 다수의 드론에 대한 음원 추정 테스트를 수행하였으며 결과 분석을 통해 제시된 방법의 유효성을 확인하고 제한사항에 대하여 논의한다.
II. 쿼드콥터의 음향 특성 분석
쿼드콥터 드론은 네 개의 프로펠러를 통해 이동하는 무인항공기를 의미하며, 이러한 구성과 동작 원리는 드론의 음향 특성을 결정하는 주요한 요인이 된다. 특히, 프로펠러 형태와 회전속도에 의해서 결정되는 블레이드 통과 주파수와 이에 대한 고조파 성분들이 드론의 음향 특성을 구분 짓는 지배적인 요소가 된다.[12] 본 장에서는 드론의 움직임 상태에 따라 각 로터에 부착된 프로펠러의 속도 변화와 드론의 음향 특성 간의 상관성을 분석하기 위한 실험적 분석과정 및 실험 결과에 대해 설명한다.
2.1 실험 구성
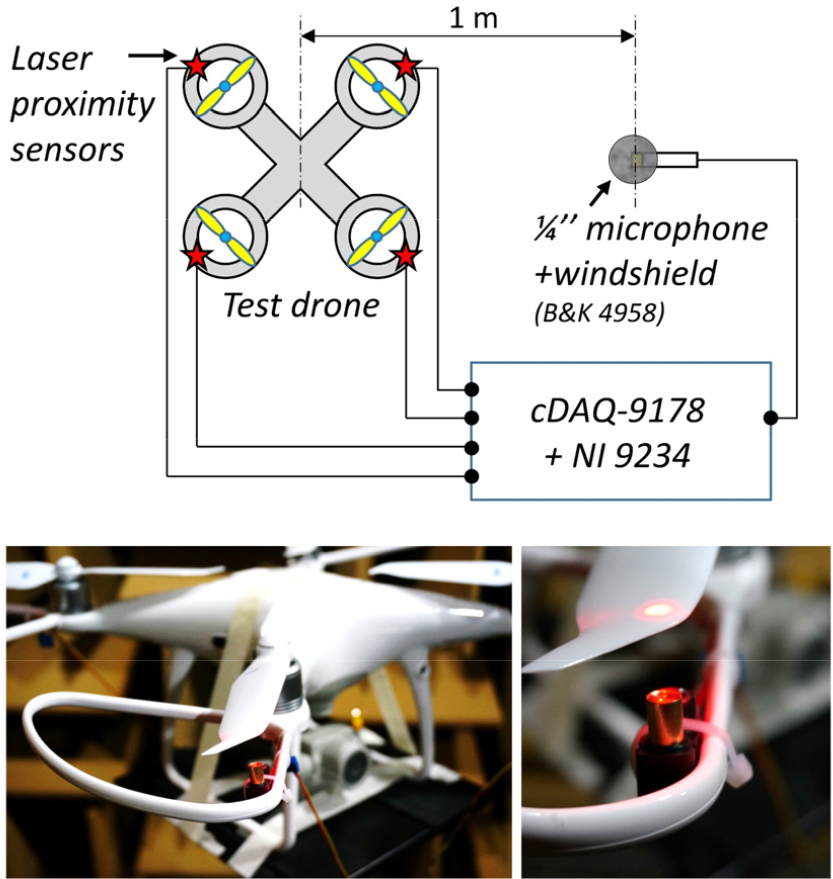
본 연구에서 사용된 드론의 움직임 상태에 따른 음향 특성을 관찰하기 위한 실험을 수행하였다. 블레이드 통과 주파수에 대한 기준신호를 측정하기 위하여 레이저 근접센서를 각 프로펠러 가이드에 부착하였고, 무향실 내부에 드론의 위치를 고정시킨 후 드론 중심으로부터 1 m 거리에서 1/4” 마이크로폰(B&K 4958) 을 통해 음향 측정을 수행하였으며, 이에 관한 실험 구성을 Fig. 1에 나타내었다. 드론의 움직임 상태에 따라 각 프로펠러의 회전 속도가 달라지며, 이에 대한 음향 측정을 수행하였다. 여기서 마이크로폰 및 각 프로펠러에 대한 근접센서 신호는 데이터 수집 장치(NI 9234) 를 통해 측정되었으며, 예상되는 음원의 스펙트럼 특성을 고려하여 25.6 kHz의 샘플링 속도로 10 s 동안 측정된 결과를 바탕으로 분석을 수행하였다.
2.2 드론 움직임 상태에 따른 음향특성
드론의 움직임 상태는 제자리 비행, 이동, 회전으로 구분할 수 있으며, 각 상태별로 네 개의 프로펠러의 속도제어를 통해 이를 구현한다. 본 실험에서는 이러한 드론 움직임 상태에 따른 음향특성을 관찰하기 위하여 제자리 비행, 전방이동, 후방이동, 좌측이동, 우측이동, 반시계방향 회전, 시계방향 회전의 총 7가지 드론 움직임 상태를 구현하였다. 여기서 로터의 평균 회전 속도를 일정하게 유지하기 위하여, 드론은 실험 중 완전히 고정된 상태에서 공회전 시켜 제자리 비행 상태를 구현하였고, 조종기의 엘리베이터, 에일러론, 러더의 임계까지 제어하여 나머지 움직임 상태를 구현하였다.
Fig. 2에 드론 움직임 상태에 따른 측정 결과를 바탕으로 마이크로폰과 근접센서를 통해 계산된 주파수 스펙트럼을 나타내었다. 여기서 주파수 해상도는 0.2 Hz가 되도록 신호처리 조건을 설정하였다. 실험에 사용된 드론의 각 로터당 블레이드 개수가 2개인 점을 고려했을 때, 공회전상태의 로터 회전 속도는 약 1500 r/min이며, 움직임 상태 및 드론의 동역학적 원리에 따라 특정 로터의 회전 속도가 상대적으로 빨라지는 것을 관찰할 수 있다. 또한, 모든 상태에 대하여 마이크로폰과 근접 센서로부터 계산되는 스펙트럼 피크 주파수가 서로 일치하는 것을 볼 수 있다. 이를 통해, 마이크로폰만을 이용한 측정 결과에서는 스펙트럼으로부터 음원을 완전히 분리할 수 없으므로 각 로터의 상태를 구별하거나 드론의 움직임 상태를 예측할 수 없는 한계점이 있다는 것을 알 수 있다.
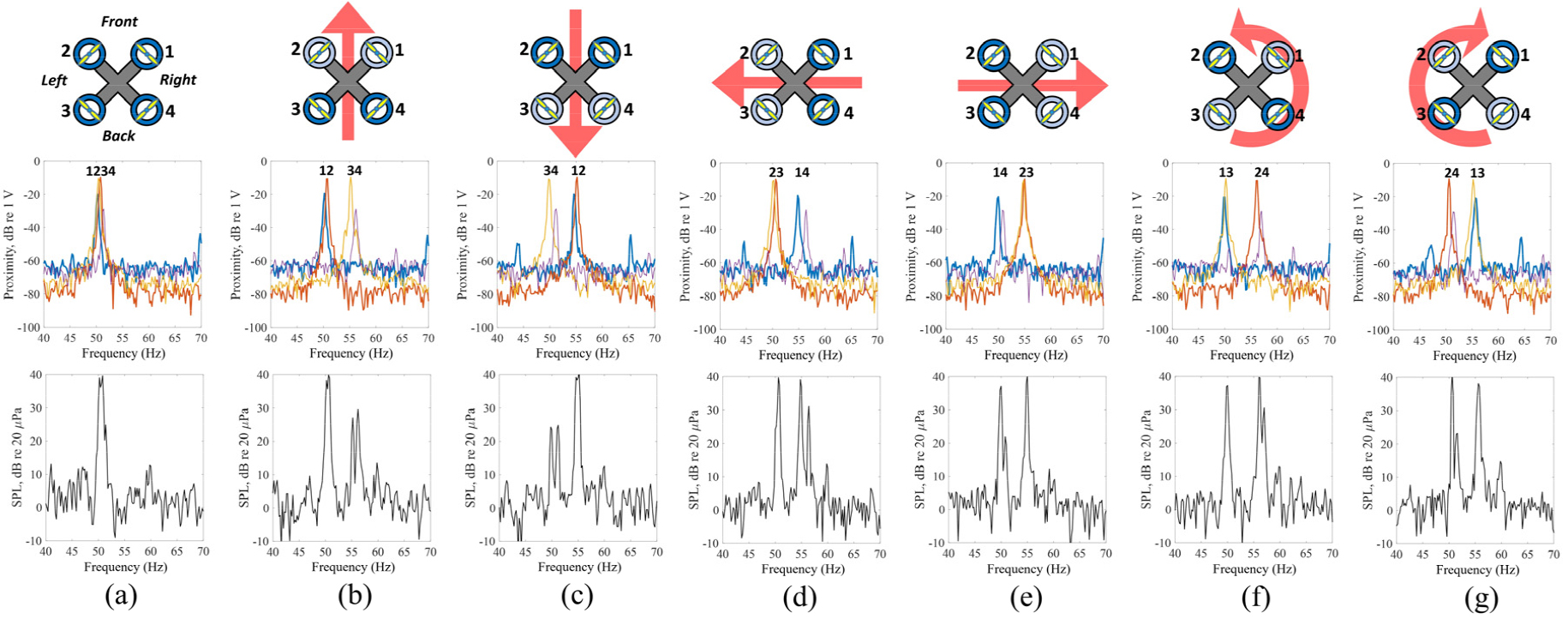
Fig. 2.
(Color available online) Test result of the experiment for analysis of acoustic characteristics according to drone movement status: (a) hovering, (b) forward, (c) backward, (d) left moving, (d) right moving, (e) counter-clockwise rotation, (g) clockwise rotation. Here, each position of the propeller is indicated by numbers on the figures.  : propeller 1,
: propeller 1,  : propeller 2,
: propeller 2,  : propeller 3,
: propeller 3,  : propeller 4.
: propeller 4.
2.3 드론 종류에 따른 음향 특성
드론의 종류 및 크기에 따라 서로 다른 로터가 사용되며, 이에 따라 각기 다른 음향 특성을 가질 수 있음을 예상할 수 있다. 이를 관찰하기 위해서 본 절에서는 서로 다른 네 종류의 드론에 대한 음향 특성을 분석하였다. 동일한 움직임 상태에 대한 측정 결과를 비교하기 위해서, 각 드론의 조종기 스로틀을 최대치까지 제어하여 모든 로터가 가장 빠르게 회전하는 조건을 구현하였다. 각 드론에 대한 음향 측정은, Fig. 1과 동일한 실험 조건에서 오로지 마이크로폰만을 사용하였다.
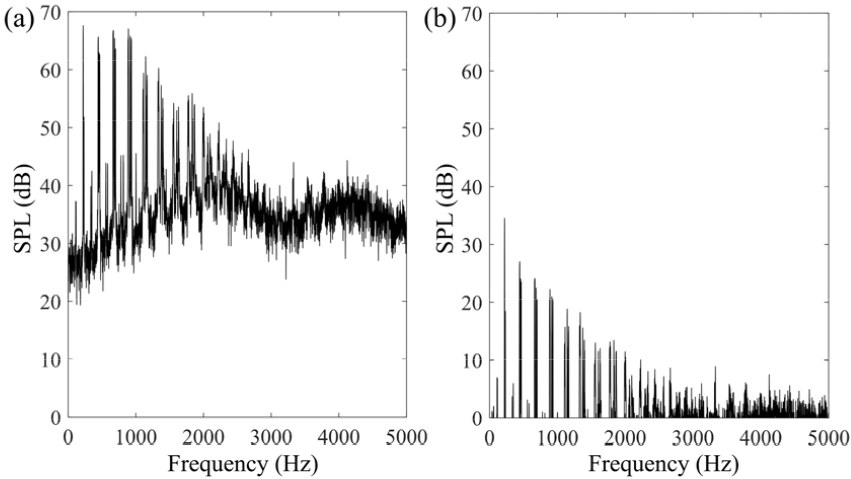
Fig. 3에 네 종류의 드론에 대한 측정 결과를 스펙트로그램으로 나타내었다. 여기서 컬러맵은 각 드론에서 측정된 음압의 최대값으로 정규화한 결과를 나타낸다. 측정 결과로부터 로터의 개수, 블레이드 통과 주파수를 확인할 수 있으며, 이를 기반으로 로터의 회전 속도를 계산할 수 있다. 드론 1과 드론 2의 측정 결과에서는 블레이드 통과 주파수가 특정 협대역 주파수에 밀집한 것을 볼 수 있으며, 이에 대한 고조파의 분포를 스펙트럼에서 관찰할 수 있으며 높은 주파수 대역으로 갈수록 분산되어 나타나는 것을 볼 수 있다. 드론 3과 드론 4에 대한 측정 결과에서는 블레이드 통과 주파수가 분산되어 나타나는 것을 볼 수 있으며, 이는 드론의 자세제어 알고리즘, 로터 추력 방향의 불일치, 또는 드론 제어 방식 차이 등, 실험 과정에서 발생하는 오차에 기인한 것으로 볼 수 있다.
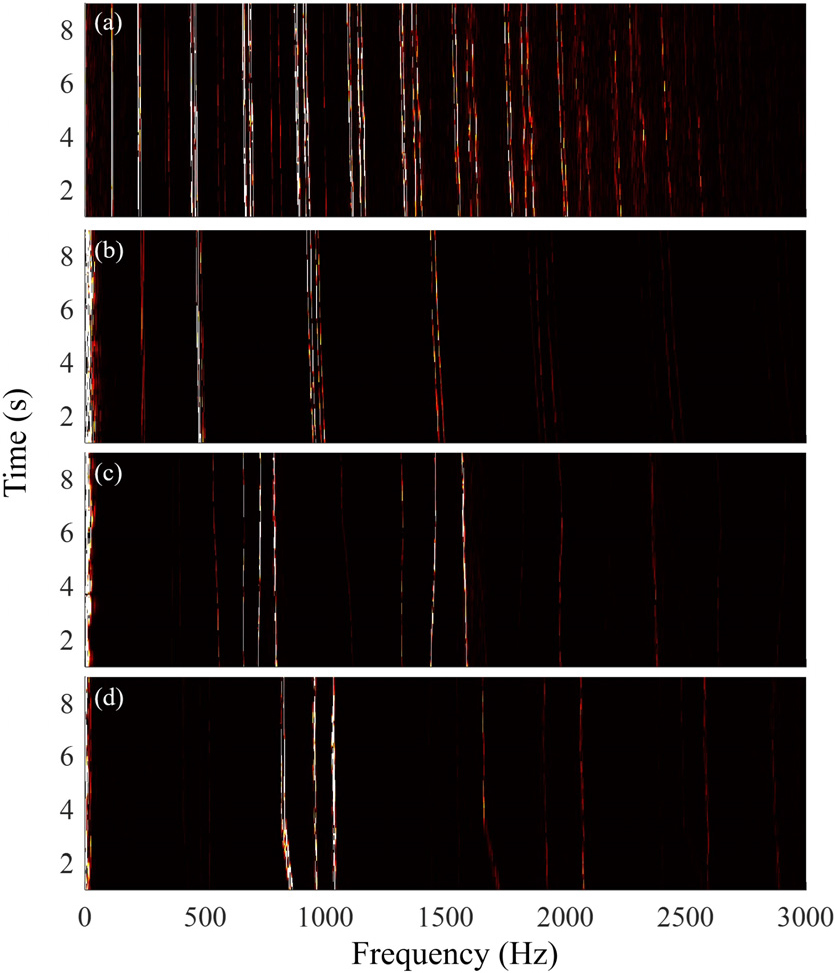
Table 1에 측정된 결과를 통해 계산된 평균 블레이드 통과 주파수, 평균 로터 회전 속도, 드론의 크기 및 질량을 나타내었다. 여기서 드론이 무거워질수록 프로펠러의 직경이 커지고 로터의 속도는 줄어드는 경향성이 나타나는 것을 볼 수 있으며, 이는 드론의 최대 이륙 중량이 증가함에 따라 큰 추력이 필요하게 되는 것을 나타낸다. 프로펠러의 추력은 로터 축 방향으로 작용하는 힘이며 다음의 식으로 표현할 수 있다.
여기서 CT는 추력 계수, 𝜌는 공기 밀도, v는 로터 회전 속도, D는 프로펠러 직경을 나타내며, 프로펠러의 크기 변화가 추력에 큰 영향을 미치는 것을 볼 수 있다. 이는 드론의 크기가 작아질수록 로터를 부착할 수 있는 공간과 블레이드의 크기가 제한되므로 이를 극복하기 위해서 로터의 회전 속도가 상대적으로 높아져야 함을 의미하며, 이를 통해 소형의 드론일수록 더 높은 블레이드 통과 주파수에 해당하는 소리를 발생시키는 것을 유추할 수 있다. 한편 Fig. 3(a)의 110 Hz, Fig. 3(b)의 235 Hz에서 모터 소음에 관련된 주파수 성분이 관찰되며, 이는 사용되는 모터의 종류 및 로터의 구조적인 특성에 따라, 모터 소음이 상대적으로 크게 발생할 수 있음을 보여준다.
Table 1.
Specification of the test drones and the rotor dynamic condition under full throttle.
본 장에서는 드론의 움직임 상태 및 드론 종류에 따른 음향 특성을 실험적으로 분석하였으며, 로터의 형태와 회전 속도가 블레이드 통과 주파수와 이에 대한 고조파 성분들로 나타나는 것을 확인하였다. 따라서 이러한 드론 음향 특성을 이용하면, 다수의 드론에 대해 측정된 결과에서 각각의 음원을 분리할 수 있다. 한편, 동일한 종류의 드론에 대해서도, 움직임 상태가 서로 다른 경우에는 블레이드 통과 주파수가 구분되며, 따라서 고조파 대역에서는 이를 분리 가능함을 알 수 있다.
III. 다수의 드론 음원 위치 추정법
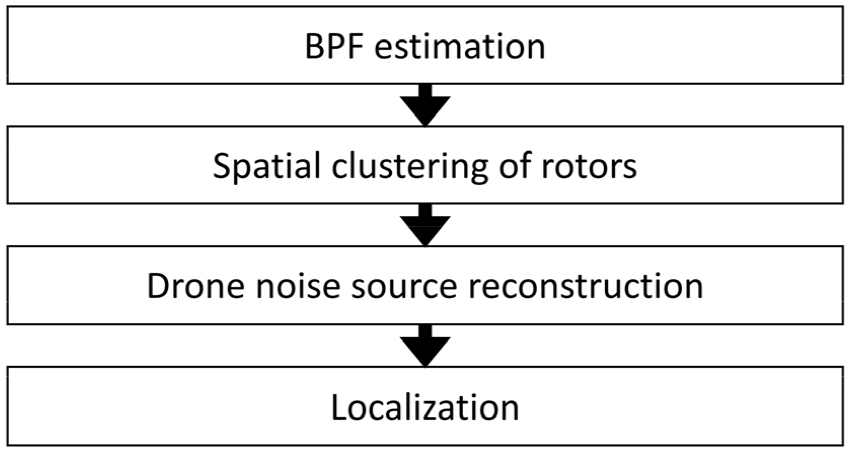
쿼드콥터 드론은 로터의 속도에 따라 블레이드 통과 주파수가 결정되며 이러한 특징을 기반으로 다수의 드론 음원 위치를 추정할 수 있다. 본 장에서는 Fig. 4와 같이 블레이드 통과 주파수 추정, 로터 공간 군집화, 음원 재현, 음원 추정의 4단계의 절차를 통해, 서로 다른 위치에서 서로 다른 블레이드 통과 주파수를 갖는 드론에 대한 위치 추정 방법에 대하여 설명한다.
3.1 블레이드 통과 주파수 추정
드론 위치 추정에 앞서, 측정된 음향 데이터를 기반으로 드론의 블레이드 통과 주파수를 추정해야 한다. 드론의 소음은 블레이드 통과 주파수 이외에도 블레이드 와류 간섭 소음, 고속 충격 소음, 광대역 소음 등 다양한 소음원을 포함한다.[13] 따라서 블레이드 통과 주파수 관련 신호를 기타 소음원으로부터 분리하기 위한 전처리과정을 수행할 필요가 있다. 예를 들어, Fig. 5에 블레이드 통과 주파수를 광대역 소음으로부터 분리한 결과를 나타내었으며, 여기서는 블레이드 통과 주파수에 해당하는 주기만큼 시간 데이터를 분할 하여 계산된 상호상관함수를 통해 신호처리 하는 방법을 적용하였다.[14]
3.2 로터 공간 군집화 및 드론 음원 재현
다수의 드론 위치 추정을 수행하기 위해서는 각각의 음원을 분리하여 상관성을 없애야만 정확한 추정 결과를 기대할 수 있다. 그러나 여러 개의 드론 소음이 혼입되어 있는 원시 음향 데이터에서는 블레이드 통과 주파수로부터 음원을 구별하기 힘든 문제가 있다.
본 방법에서는, 추정되는 모든 블레이드 통과 주파수에 대하여 마이크로폰 어레이를 이용한 위치 추정을 선행적으로 수행함으로써 로터 단위의 공간 정보를 확보한 후, 이에 대한 공간 군집화를 통해 각 드론에 대한 로터 소음원을 분류한다. 군집화된 로터 소음원들을 통합하여 각각의 드론 음원을 재현하였으며, 재현된 음원은 다수의 드론에 대한 음원 위치 추정에 사용되었다.
각 로터의 음원 위치 추정을 수행하기 위해 드론 소음 분류 필터링 방법을 적용하였으며,[9] 필터링 된 음향 데이터는 다음 수식으로 표현된다.
여기서 은 j번째 마이크로폰에서 측정된 음압의 원시데이터를 나타내고, 은 N개의 블레이드 통과 주파수 관련된 피크 성분들을 추출하기 위한 필터를 나타낸다. 이상적인 실험 환경에서는 N개의 블레이드 통과 주파수를 비교적 정확히 추정할 수 있지만, 다양한 잡음이 포함될 수 있는 실제 음향 측정 환경에서는 블레이드 통과 주파수의 추정 오차가 크게 발생할 수 있다. 따라서 필터링 된 음압의 신호 대 잡음비를 높이기 위하여, 은 n번째 피크 주파수에 대한 고조파 성분들을 포함할 수 있도록 하며 이를 다음과 같은 수식으로 나타낸다.
여기서 는 i번째 고조파 성분을 필터링하기 위한 충격응답함수이며, 은 m개의 고조파 성분에 대한 필터링을 수행한다.
필터링 된 음향 데이터를 통해 N개 음원에 대한 음원 위치 추정을 선행적으로 수행한다. 여기서, 추정 대상 음원이 주로 저주파수 대역에서 음향에너지가 집중되어있는 점을 고려하여, 마이크로폰 어레이의 형태 및 마이크로폰의 개수에 따라 적합한 음원 위치 추정 알고리즘을 적용한다.
한편, Eq. (2)를 통해 계산되는 필터링 된 음원은 각 로터의 소음원이 완전히 분리되었음을 가정하며, 상관 잡음이 크게 혼입되는 경우에는 추정된 결과가 실제와 크게 편향되어 나타날 수 있다. 음원 추정이 정상적으로 수행되는 경우에는 특정 드론의 로터들에 대한 음원 추정 결과가 공간상에 밀집된 군을 형성하게 되고, 추정 오차가 크게 발생하는 경우에는 분산된 군 또는 군을 이탈하는 경향성을 나타나게 된다.
Fig. 6(a)에 드론 1 및 드론 2에 대해 필터링 된 음향 데이터에 대한 음원 위치 추정 결과 및 k-평균 알고리즘을 적용하여 추정 결과를 공간 군집화한 결과를 나타내었다. 여기서, 500 Hz 미만의 피크 성분 및 m = 2개의 고조파 성분에 대한 필터링을 수행하였다. 군집 1과 군집 2는 각각 드론 1과 드론 2의 로터 주파수에 상응하는 위치 추정 군을 형성하는 것을 관찰할 수 있다. 군집에서 벗어난 주파수 성분, 117 Hz, 400 Hz는 각각 상관 잡음 및 비상관 잡음에 해당하여 위치 추정 오차를 크게 유발하므로 계산에서 제외하였다. 최종적으로 두 가지 군집에 대해 재현된 음원의 스펙트럼을 Fig. 6(b)에 나타내었으며, 실제 측정된 신호로부터 각 드론에 대한 주파수 성분을 분리할 수 있음을 보여준다. 분리된 음원은 각 드론의 로터에서 발생하는 음향에너지를 포함하므로, 이를 통해 최종적으로 다수의 드론 위치를 추정하는데 적용될 수 있다.
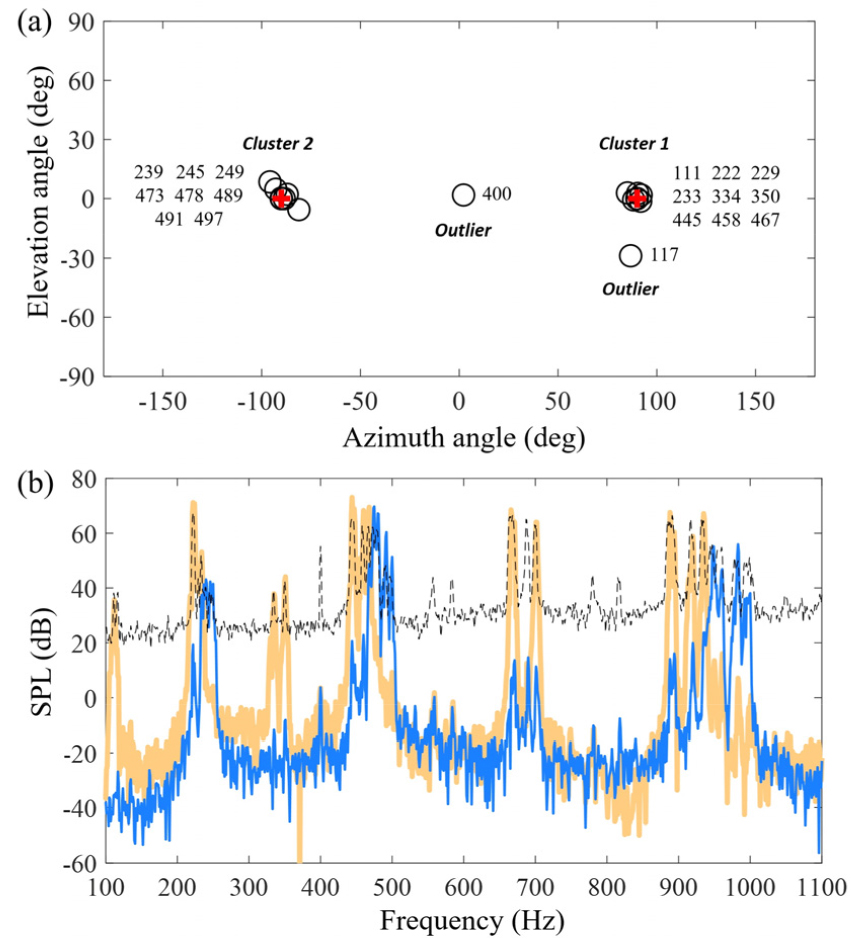
Fig. 6.
(Color available online) (a) The result of spatial clustering the localization results for the sound source that mixed of measured sound for drone 1 and drone 2, (b) spectrum of the reconstructed sound sources:  , cluster 1;
, cluster 1;  , cluster 2. The numbers shown in the graph represent the estimated rotor frequency.
, cluster 2. The numbers shown in the graph represent the estimated rotor frequency.
IV. 위치 추정 시뮬레이션
서로 다른 세 종류의 드론에 대한 음원 위치 추정 시뮬레이션을 수행하였다. 여기서 사용된 음원의 원 신호는 2.3절의 드론 1, 드론 2, 드론 3 에 대한 측정 결과를 활용하였으며, 마이크로폰의 간격이 6 cm인 정사면체 형태 마이크로폰 어레이를 사용하여 원거리 음장에서 평면파 형태로 전파되는 음원의 위치를 추정하는 것을 모사하였다. 각 음원의 위치는 임의로 선정된 네 가지 경우를 설정하였으며, 제자리 비행중인 드론의 위치를 추정하기 위하여 샘플링 속도 25.6 kHz로 1 s간 측정된 결과를 사용하였다.
드론의 블레이드 통과 주파수를 추정하기 위하여 나타낸 스펙트럼을 Fig. 7에 나타내었으며, 마이크로폰 간격에 따른 공간 앨리어싱을 고려하여 피크 분석을 통해 1500 Hz 미만에서 총 67개의 추정 대상 주파수를 선별하였고, m = 2개의 고조파 성분에 대한 필터링을 수행하여 계산된 원시데이터를 기반으로 음원위치 추정을 수행하였다. 로터 음원 위치 추정을 수행하기 위해서 다중 신호 분류(MUltiple SIgnal Classification, MUSIC) 알고리즘을 적용하였고, 추정된 로터 위치에 대한 군집화 과정을 통해 재현된 음원을 Fig. 8에 나타내었다. 군집화를 수행하기 위하여 k-평균 알고리즘 및 엘보우 방법을 적용하여 최적 k 값을 선정하였고,[15] 이를 통해 각 드론에 대한 로터 소음원 군집을 형성하였다.
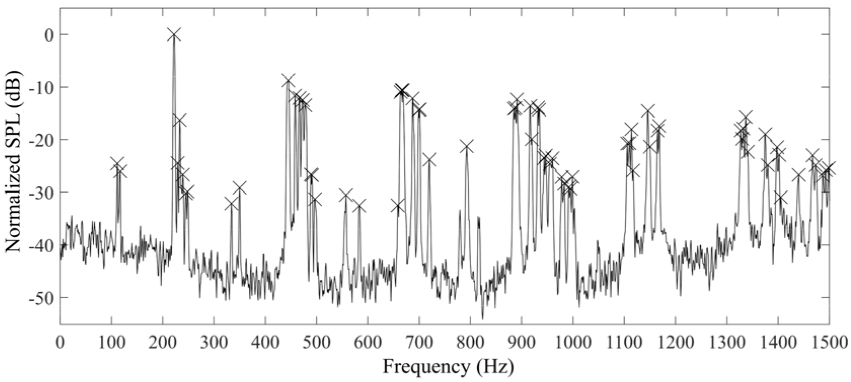
Fig. 8에 군집을 기반으로 각 드론에 대한 음원을 재현한 결과와 원 음원을 비교하였다. 이를 통해 Fig. 7에서 확인할 수 없었던 각 드론에 대한 음향 특성이 구별되는 것을 볼 수 있다. 분리된 음원은 최종적으로 다수의 드론의 음원 위치 추정에 사용되며, 본 시뮬레이션에서는 도달 시간 차(Time Difference Of Arrival, TDOA), 지연 합 빔포밍(Delay-And-Sum beamforming, DAS), MUSIC, 3차원 음향인텐시티 벡터 추정 방법(3-Dimensional Acoustic Intensimetry, 3DAI)을 적용하여 위치 추정 결과를 비교하였다.
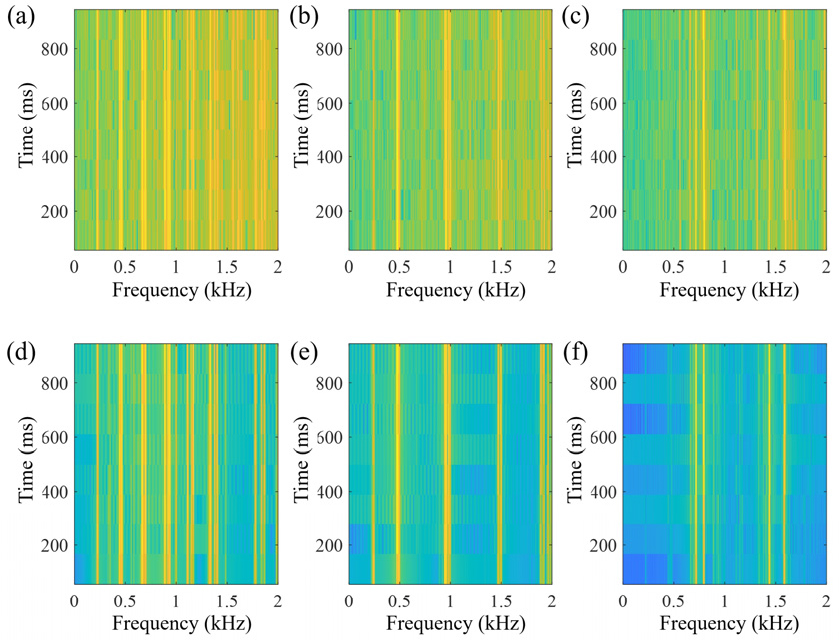
Fig. 9는 네 가지 조건에 대하여, 분리되지 않은 로터 음원에 대하여 MUSIC 알고리즘을 통해 위치 추정을 수행한 결과를 보여주고 있다. 방위-고도각 평면 그래프 위에 나타낸 기호는 각각의 추정된 블레이드 통과 주파수에 대한 위치추정 결과를 나타내며, 그 결과가 크게 분산되어 나타남에 따라서 실제 드론의 위치를 명확하게 파악하기 어려운 것을 볼 수 있다. 특히 드론 1과 드론 2의 블레이드 통과 주파수가 매우 근접함에 따라 나타나는 높은 코히어런스는, 상호 음원 방향으로 추정 결과를 편향시키는 것을 보여준다.
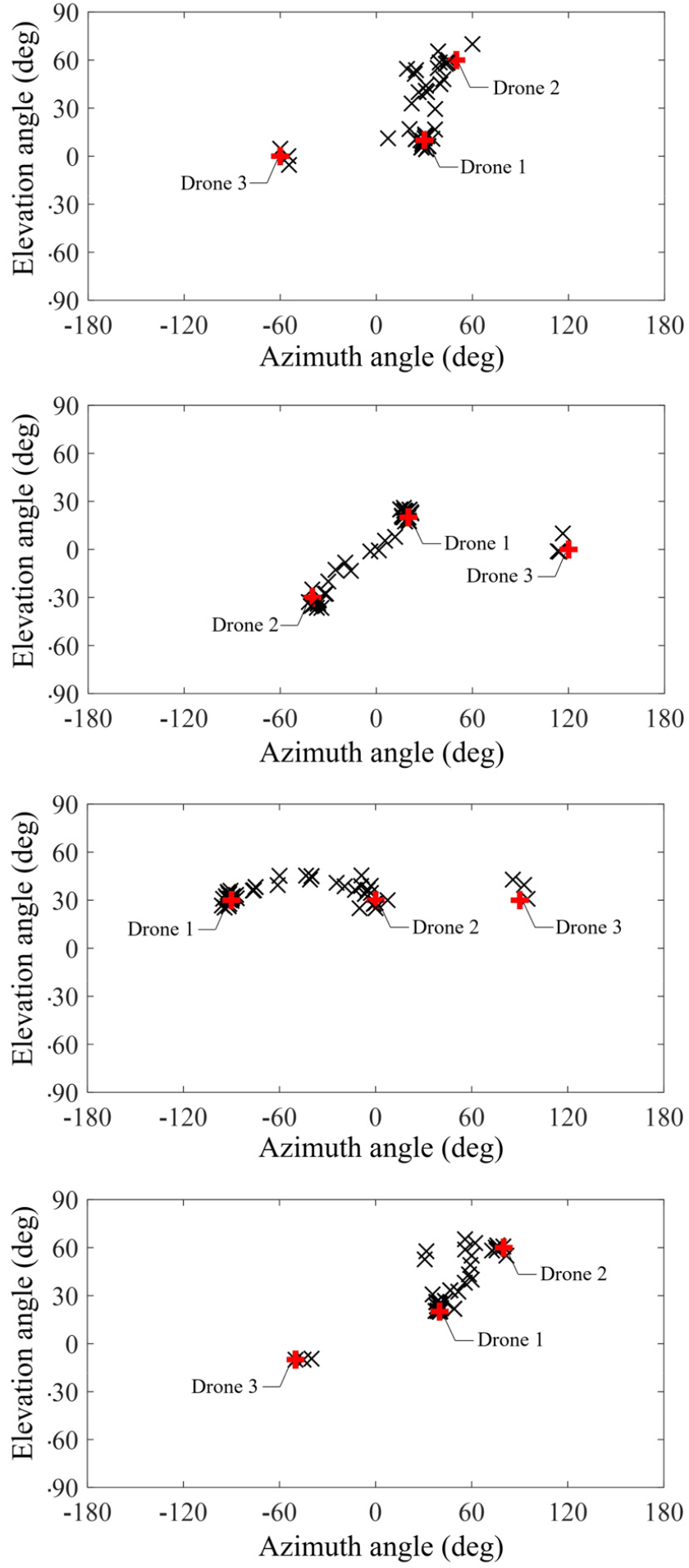
 : actual source positions, ×: estimated source positions.
: actual source positions, ×: estimated source positions.Fig. 10 및 Table 2는 재현된 음원에 대한 위치 추정 결과를 나타내며, 여기서는 로터 소음원 추정 결과에 비해서 드론의 위치가 명확히 구별되는 것을 볼 수 있다. 또한, 음원 위치 추정 방법에 따라 정확도에 차이가 나타나는 것을 볼 수 있으며, TDOA와 같이 시간 영역 기반의 추정 방식에서 상대적으로 큰 오차가 나타나는 것을 관찰할 수 있다. 특히 GCC-PHAT 또는 SRP-PHAT와 같이 마이크로폰에 도달하는 파동의 위상만을 고려하는 위치 추정 방식에서도 큰 오차가 나타나는 것을 볼 수 있었으며, 이는 협대역의 저주파수를 갖는 드론 음원의 특성으로 인해서 시간 및 위상 분해능이 떨어짐으로 인해 나타나는 결과로 해석할 수 있다.
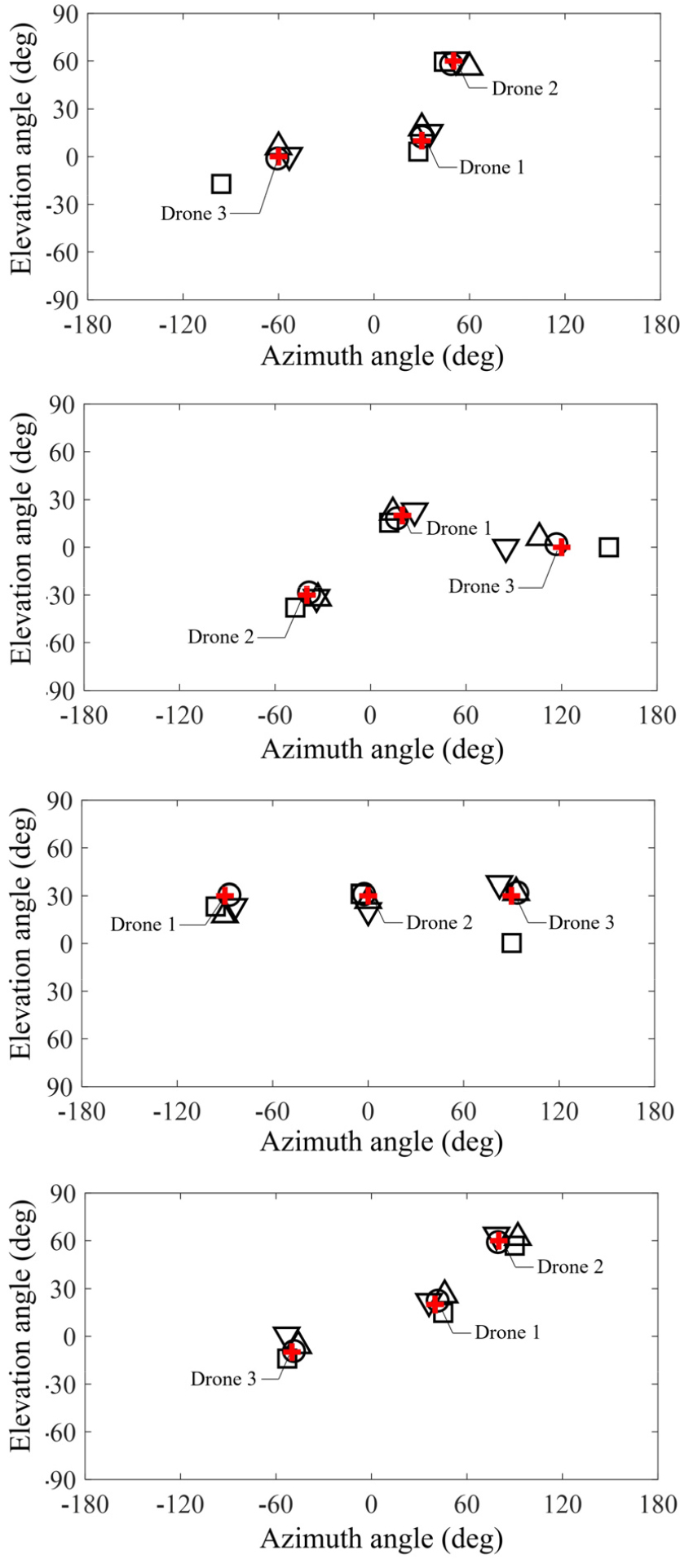
 : actual source positions, □: TDOA, △: beamforming, ▽: MUSIC, ○: 3DAI.
: actual source positions, □: TDOA, △: beamforming, ▽: MUSIC, ○: 3DAI.Table 2.
Localization test result for the reconstructed drone noises.
DAS, MUSIC, 3DAI를 통한 추정 결과에서는 비교적 작은 오차가 나타나지만, 드론의 종류 및 기준 방향이 정확도에 영향을 미치는 것을 볼 수 있으며, 이는 완전히 분리되지 않은 음원으로 인한 간섭 현상 때문에 발생한 것으로 볼 수 있다. 3DAI는 낮은 헬름홀츠 수에서 추정 정확도가 높은 특징이 있으며, 따라서 본 시뮬레이션 테스트에서 가장 높은 정확도를 나타내는 것을 볼 수 있다.[16]
다수 드론 음원에 대한 테스트 결과, 분리된 음원의 명확성과 음원 추정 알고리즘이 다수의 드론 위치 추정 정확도에 영향을 미치는 것을 볼 수 있다.
블레이드 통과 주파수 추정 기반의 음원 분리 방식은, 각각의 드론이 마이크로폰 어레이를 기준으로 서로 다른 음원 도달 방향에 존재하는 것을 가정한다. 따라서 블레이드 통과 주파수가 서로 비슷하여 높은 코히어런스가 발생하는 경우에는, 비슷한 방위각과 고도각에 있는 드론 간의 위치 차이를 명확하게 구별하기 어렵다. 이 경우에는 두 종류의 음원에 대한 하나의 큰 추정 군이 형성되므로, 최종적으로 해당 드론 군에 대한 음원 위치 추정 결과를 얻게 된다. 한편, 높은 코히어런스를 갖는 두 음원에 대한 위치 추정을 수행하는 경우에도, 서로 멀리 떨어져 있다면 군집화 과정에서 이상값을 제외할 수 있으므로 음원의 분리가 가능하다.
본 장에서는 시뮬레이션 과정을 통해 이러한 제한사항이 있음을 확인하였다. 향후에는 본 추정 방법의 한계를 명확하게 설정하기 위하여, 코히어런스 및 음원의 밀집 정도에 따른 군집화 명확성과 이에 따른 음원 추정 정확도에 대한 분석이 필요하다. 또한, 추후 연구에서 음원 분리의 정확도를 향상시킬 수 있는 마이크로폰 어레이 구조 및 상관성이 높은 음원을 분리할 수 있는 알고리즘이 적용된다면 다수의 드론 위치 추정 정확도를 향상시킬 수 있을 것으로 기대한다.
본 논문에서 제시된 예제에서는 드론이 정지한 상태에 대하여 적용한 결과를 보여주고 있다. 실제 드론이 이동하는 경우에는 도플러효과에 의한 주파수 변화가 발생하며, 동작 상태 및 이동 속도 변화에 의하여 주파수가 변화할 수 있다. 이 경우에도 본 예제에서 적용된 1 s 이내의 시간 샘플을 취하는 경우, 상대 속도 변화가 크지 않은 상황에 대해서는 이동 중인 드론에 대한 위치 추정이 가능하다.
V. 결 론
본 논문에서는 쿼드콥터 드론의 음향 특성을 분석하고 이를 기반으로 다수의 드론 음원에 대한 위치 추정 방법을 설명하였다. 드론의 종류 및 드론의 움직임 상태에 따라 블레이드 통과 주파수 및 이에 대한 고조파 특성이 구분되는 특성을 기반으로, 마이크로폰 어레이에서 측정된 음향 신호로부터 각 드론에 부착된 로터의 개별 위치 추정을 수행한 결과를 공간 군집화하여 드론의 음원을 재현하였다. 재현된 음원은 최종적으로 음원 추정 알고리즘을 적용하여 다수의 드론 위치를 추정할 수 있다. 블레이드 통과 주파수가 거의 일치하는 조건에 대해서는 높은 상관성으로 인해서 추정 오차가 커지는 것을 볼 수 있으며, 이러한 경우에도 서로 겹치지 않는 공간에 존재하는 드론에 대해서는 군집화 과정을 통해 다수의 드론 위치를 추정할 수 있다.
