

I. 서 론
II. 직접수열 대역확산 방식의 송수신기 구조
III. 도플러 편이 추정 및 보상
3.1 도플러에 의한 영향 및 기저대역 보상
3.2 도플러 추정방법
3.3 Frank 신호열
IV. 해상 실험환경 및 결과
4.1 실험 데이터 구성
4.2 실험 환경
4.3 데이터 분석
V. 결 론
I. 서 론
수중 음향 채널은 주파수에 따른 감쇠가 증가하고, 시간에 따라 변화하는 다중경로 전달 특성을 갖으며, 낮은 전파속도를 갖는 것으로 특징지을 수 있다.[1] 주파수 증가에 따른 신호 감쇠의 증가와 주파수에 따른 환경 잡음의 크기 등으로 인해 수중통신 시스템의 통신 목표거리에 따라 사용가능한 주파수대역이 정해지며, 통달 거리가 짧으면 넓은 주파수 대역에 걸쳐 신호전달이 가능하고, 통달 거리가 길면 사용할 수 있는 주파수는 낮아지면서 그 대역폭 또한 좁아진다.[1] 수중 음향은 해수면과 해저면 등의 경계면에서의 반사와 음향의 굴절 등에 의해 다중경로 신호가 전달되며 해양환경의 지속적인 변화로 그 특성이 시간에 따라 변화하며, 송신기와 수신기의 위치와 음속분포에 따라 다중경로 전달 특성이 달라진다. 또한, 낮은 전파속도(약 1500 m/s)로 인해 송수신기간의 상대적인 이동 및 해류 등에 의해 큰 도플러(Doppler) 편이가 발생한다.[1]
시간적 및 공간적으로 복잡한 특성을 가지고 있는 수중통신 채널환경에서 장거리 수중통신을 위해 낮는 신호대잡음비(Signal to Noise Ratio, SNR)에서도 강인한 통신 특성을 갖는 확산대역 통신 방식을 사용한다.[2] 확산대역 통신 방식은 다중경로 전달에 의한 문제를 완화할 수 있는 장점이 있으나, 하나의 데이터를 여러 칩(chip)구간으로 나누어 보내어 사용하는 대역폭에 비하여 전송속도가 낮다는 단점이 있다.
직접수열 확산대역과 관련하여, Reference [2]에서는 심볼율에 맞춰 Phase-Locked Loop(PLL)과 자동이득제어가 동작하는 역확산 수신기 구조와 칩당 2번 샘플링하여 칩율에 맞춰 적응 채널등화와 위상추적을 수행하는 수신기 구조를 제안하고, 13.5 kHz의 반송주파수와 4.8 kHz의 대역폭을 이용하여 19 bps(255 칩확산)에서 320 bps(15 칩확산)의 전송속도를 갖는 방식을 천해역 400 m ~ 500 m 거리에서 실험하여, 후자의 수신기 구조가 더 바람직한 방법임을 제시하였다. Reference [3]에서는 17 kHz의 반송주파수와 4 kHz의 대역폭을 사용하고, 직접수열 대역확산 방식을 사용하여 8 bps 전송속도를 갖는 방식을 3.4 km거리에서 실험하였다. Reference [4]에서는 통신에 사용하는 음파 신호가 수중생물에 미치는 영향을 경감하기 위해 확산대역 신호를 이용하여 보다 작은 크기의 신호를 송신하는 방법을 제안하였으며, 북해에서의 실험을 통해 170 dB re 1 uPa @1m 이하의 송신 출력으로 10 km 거리에서 8 kHz 대역폭을 이용하여 최대 140.69 bps의 통신이 가능함을 실험하였다. 국내에서는 동해의 3 km 송수신 거리에서 6 kHz의 반송주파수에서 약 2 kHz 대역폭을 사용하고, 직접 수열 확산방식을 사용하고 칩 단위 등화기를 적용하여 100 bps 전송속도를 갖는 실험[5]과 각 심볼당 63개의 칩으로 확산시킨 후 직접수열 대역확산과 3개의 중첩된 직접수열 대역화산 방식을 사용하여 각각 8 bps와 24 bps의 전송속도를 갖는 장거리 수중통신 방식을 동해 20 km거리에서 2,750 Hz의 반송주파수와 1,536 Hz의 대역폭을 사용한 실험[6]을 하였다.
수중 통신장치가 이동하는 경우, 수신 신호는 도플러 편이가 발생하여 신호의 길이가 도플러 편이에 비례하여 늘어나거나 줄어들고, 그 위상 또한 주파수 편이가 발생한 것과 같은 신호 왜곡이 발생한다.[7] 이러한 왜곡을 일으키는 도플러 편이의 추정 방법은 크게 두 가지로 구분할 수 있다. 한 가지 방법은 보내려는 데이터의 앞과 뒤에 도플러 편이에 강인한 신호를 프리앰블(Preamble)과 포스트앰블(Postamble)에 보내고, 수신부에서 프리앰블과 포스트앰블의 도달 시간차를 계산하여 해당 패킷의 도플러 편이를 추정하는 방법[7]이고, 다른 방법은 보내려는 데이터 앞에 도플러 편이에 민감한 신호를 프리앰블로 보내고, 수신부에서는 서로 다른 도플러 편이에 정합된 상관 필터들을 병렬로 연산하여 그 중 최대의 상관값을 갖는 상관 필터에 적용한 도플러 편이값을 수신신호의 도플러 편이로 추정하는 방법[4,7,8]이다. 첫 번째 방법은 패킷 수신이 완료된 이후에 신호처리를 해야하기 때문에 실시간 동작에 적합하지 않고, 두 번째 방법은 병렬 상관필터 수가 증가함에 따라 도플러 편이 추정의 정확도는 증가하나 도플러 편이를 추정하는 범위와 정확도에 따라 연산 복잡도가 증가하는 문제가 있다. 본 논문에서는 이러한 문제점들을 극복하면서 실시간으로 동작하는 수중통신모뎀 구현을 위해, 프리앰블 신호를 두 번 반복하고 2단계에 걸쳐 도플러 편이를 추정하는 방법을 제안한다.
또한, 이동에 따른 동작검증을 위해 제안하는 도플러 편이 추정방법을 직접수열 확산방식을 사용하는 통신방법에 적용하고, 모뎀이 수중에서 이동하는 환경을 모사한 가상 이동신호를 송신하고, 바다에서 취득한 데이터를 분석하였다.
본 논문의 구성은 다음과 같다. 제 II장에서는 직접수열 대역확산 방식의 송수신기 구조에 대해 설명하며, 제 III장에서는 제안하는 도플러 편이 추정 및 보상방법에 대해 설명하고, 제 IV장에서는 해상 실험을 위한 환경과 실험 결과를 설명하고, 제 V장에서는 결론을 맺는다.
II. 직접수열 대역확산 방식의 송수신기 구조
본 논문에서는 직접수열 대역확산 방식을 사용하는 장거리 수중통신에서 데이터 전송을 위해서 Differential-Quadrature Phase Shift Keying(DQPSK) 성상도를 갖는 신호를 사용하는 경우를 고려한다. 직접수열 대역확산 방식은 전송하려는 신호와 확산신호를 곱하여 대역확산을 수행한다. 대역확산을 위해 하나의 데이터 심볼이 16개의 칩 심볼로 확산하도록 하였으며, 데이터 심볼은 수신부에서 연산복잡도를 줄이기 위해 DQPSK를 사용한다. DQPSK는 QPSK에 비해 동일한 SNR에서 비트 오율(Bit Error Rate, BER) 성능이 떨어지지만, 수신부에서 위상동기를 찾지 않아도 되는 장점이 있다.[9] 또한, 직접수열 대역확산 방식 신호의 수신을 위해 RAKE 복조기를 사용하는 경우, RAKE 복조기에서 전송신호 결정을 위해 각각의 다중경로에서 도달한 신호를 더할 때 각 다중경로별 위상편이에 영향을 받지 않기 때문에 신호 결합이 용이한 장점이 있다.
Fig. 1의 송신부는 직전 전송심볼과 전송하려는 2 bit의 입력데이터 조합으로 DQPSK 심볼을 만들고, 하나의 DQPSK심볼과 16개의 확산신호를 곱해 16개의 QPSK신호를 생성하고, Pulse-Shaping Filter(PSF)를 통과하고, 변조기를 거쳐 반송파 대역 송신신호를 생성한다. 프리앰블 부분은 별도의 프리앰블 심볼 생성부에서 PSF로 입력되고, 이후의 신호처리 과정은 동일하다.
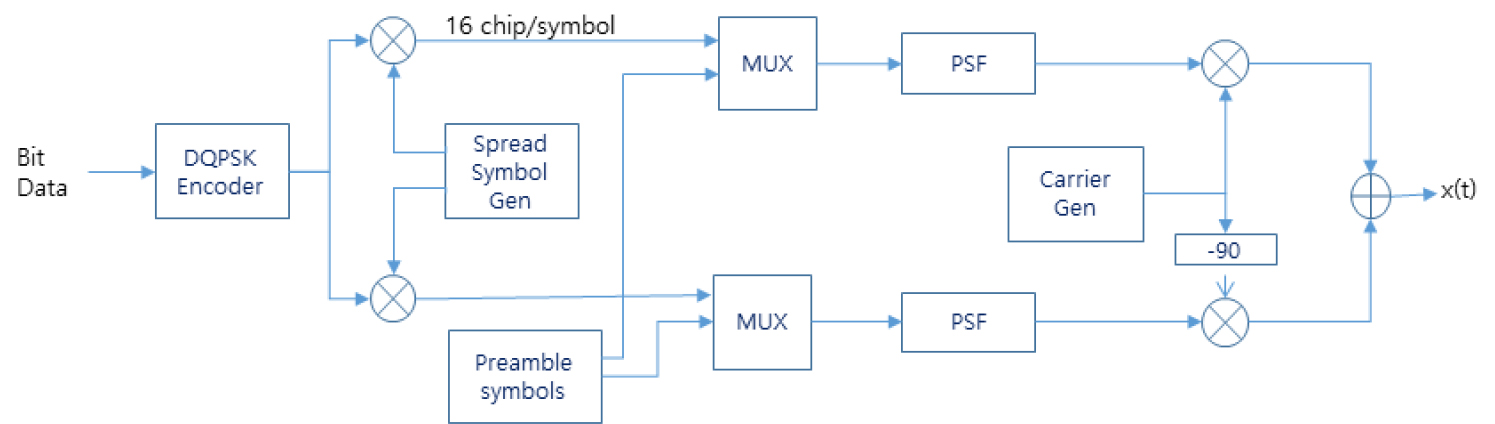
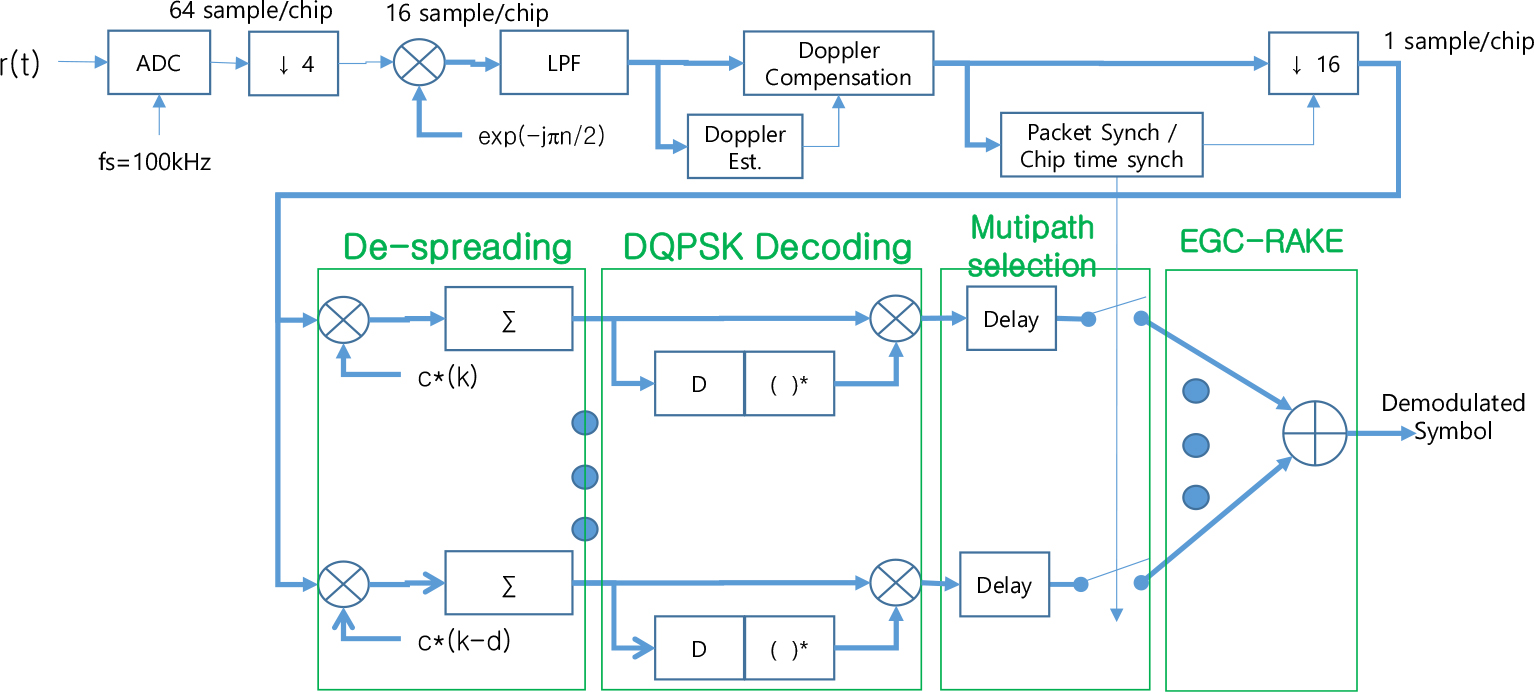
Fig. 2의 수신기는 채널을 통해 수신된 신호를 반송파 대역에서 샘플링을 수행하고, De-mixer와 Low- Pass Filter(LPF)를 통하여 기저대역 신호로 변환하고, 기저대역에서 패킷의 시작을 검출하는 것을 포함한 도플러 편이 추정 및 보상을 수행한다. 도플러 편이가 보상된 신호에서 패킷 시작시간 및 칩심볼 시간을 검출하고, 검출된 칩심볼 시간을 기준으로 칩심볼 간격으로 데시메이션을 수행하고, 칩심볼 단위로 병렬 구조를 갖게 역확산, DQPSK 복호과정을 거치고, 프리앰블을 이용하여 추정된 채널 순시응답에 따라 주요 경로를 포함하여 큰 에너지를 갖는 경로들을 동일한 크기로 결합한(EGC-RAKE블록) 후, 수신된 신호를 결정한다. Fig. 2에서 c(k-d)는 d 칩심볼만큼 지연된 확산신호이다. 본 논문에서 제안하는 수신기 구조는 References [2]와 [5]에서와 같이 수신부에 PLL 및 채널 등화기를 포함하고 있지 않아 수신부의 연산이 매우 간단한 장점이 있다.
III. 도플러 편이 추정 및 보상
3.1 도플러에 의한 영향 및 기저대역 보상
통신 노드의 이동에 따라 도플러 편이가 발생하였을 때, 통신 노드의 이동속도를 m/s라 하고, 음속의 이동속도를 c라 할 때, 도플러 편이는 아래와 같다.
통과대역의 송신신호를
라 하고, 여기서 는 기저대역 신호이고, 는 반송주파수이다. 이해의 편의를 위해 본 논문에서는 단일 경로를 갖는 경우로 가정하여 설명한다. 단일 경로를 갖는 경우, 도플러 편이가 발생하였을 때 채널응답 특성은 다음과 같이 모델링할 수 있다.
여기서 A는 채널을 통과하면서 발생하는 크기 감쇠를 반영하는 값이고, 는 신호가 수신부까지 도달하는데 걸리는 전파 지연 시간이다.
통과대역의 수신신호를 라 할 때, 다음과 같이 나타낼 수 있다.
여기서 이해의 편의성을 위해 잡음성분은 생략하였다.
기저대역 수신신호는 통과대역 수신신호에 복조신호를 곱하고, 저역통과 필터링을 수행한 신호로 다음과 같이 나타낼 수 있다.
여기서 는 에 의해 발생하는 위상변화량을 의미하고, LPF( )는 저역통과 필터링을 의미한다. Eq. (5)로부터 통신노드의 이동 속도에 따라 심볼의 길이가 늘어나거나 줄어들고, 위상변화도 있음을 알 수 있다.
이동하는 수중 통신 환경에서 도플러 편이의 보상은 필수적이다. 일례로, 반송주파수 6.25 kHz에서 칩심볼율이 1.5625 kHz 이고, 데이터 심볼당 16개의 칩 심볼로 확산 변조를 하는 수중통신노드가 10 m/s로 이동하는 경우, 도플러 편이 발생에 의해 데이터 심볼당 심볼길이는 약 0.67 % 변경되고, 위상은 약 153°가 회전되어 BPSK 변조를 사용하는 경우에도 올바른 수신을 할 수 없다.
수신부에서 정확한 도플러 편이를 알고 있다고 가정하는 경우, 기저대역 신호를 리샘플링을 통해 도플러 보상을 수행하면 다음과 같다.
기저대역에서 정확한 도플러 편이를 리샘플링을 통해 보상하더라도 Eq. (6)의 세 번째 항에 나타는 것과 같이 도플러 편이에 의해 주파수편이가 발생하고, 이는 Eq. (7)과 같이 위상회전을 통해 보상해 주어야 한다.
리샘플링한 신호에 대해, 도플러에 의해 발생하는 주파수 편이도를 보상하면, 다음과 같이 나타낼 수 있다.
여기서 도플러 보상 이후에 신호 길이 변화가 보상되어 대신에 로 표기하였다.
3.2 도플러 추정방법
본 논문에서는 한 패킷구간에서 도플러 편이가 변하지 않는 경우에 사용할 수 있는 도플러 편이 추정방법을 제안한다. 도플러 편이 추정 방법은 Fig. 3(a)과 같이 보내는 데이터의 앞과 뒤에 도플러 편이에 강인한 신호를 프리앰블과 포스트앰블에 보내고, 수신부에서 프리앰블과 포스트앰블의 도달 시간차를 계산하여 해당 패킷의 도플러 편이를 추정하는 방법[7]과 Fig. 3(b)와 같이 도플러 편이에 민감한 신호를 프리앰블로 보내고, 수신부에서는 상관필터 뱅크를 써서 도플러 편이를 추정하는 방법[4,7,8]이 있다.
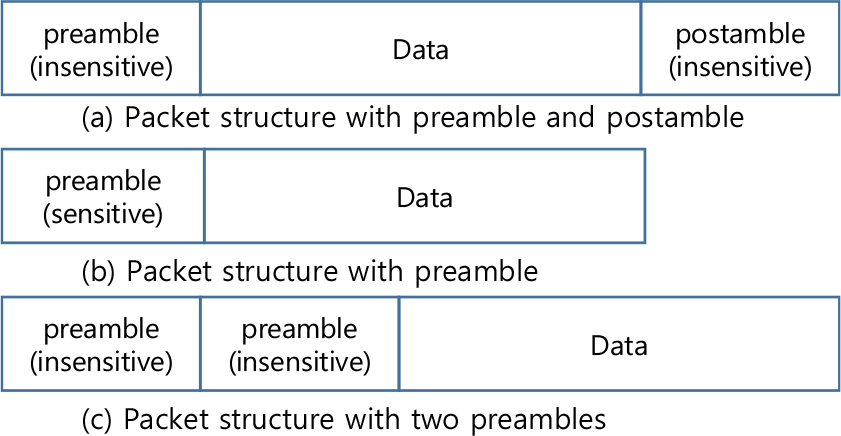
Fig. 3(c)와 같이 데이터를 전송하는 패킷 앞부분에 도플러 편이에 강인한 특성을 갖는 프리앰블을 두 번 반복하여 보내고, 수신부에서는 두 개의 프리앰블 신호열을 이용하여 2단계에 걸쳐 도플러 편이를 추정하는 방법을 제안한다. 제안하는 방법은 두 개의 프리앰블 신호열의 도달 시간차를 계산하여 도플러 편이를 1단계로 추정한다. 1단계에서 추정한 도플러 편이는 두 프리앰블 신호열의 시간차가 짧고, 실제 구현에서는 샘플링한 신호를 사용하므로 추정할 수 있는 도플러 편이의 정확도가 제한된다. 프리앰블의 길이가 심볼이고, 심볼당 번 과샘플링하면, 1단계에서의 도플러 편이 추정 정확도는 에 반비례한다. 1단계 도플러 추정값을 사용하여 두 개의 프리앰블에 해당하는 구간에 대해 도플러 편이 보상을 수행한다. 도플러 편이 보상은 Eqs. (6), (7)과 같이 리샘플링과 도플러편이에 의한 주파수 편이 보상을 수행하는 것이다. 도플러 편이가 보상된 두 프리앰블 구간에 해당하는 샘플들을 이용하여 2단계로 잔존 도플러 편이를 추정한다.
2단계 도플러 편이 추정은 프리앰블 구간의 신호의 위상변화를 측정하여 잔존 도플러 편이를 추정한다. 1차보상이 된 신호는 Eq. (9)와 같이 나타낼 수 있다.
Eq. (5)와 비교하면 1단계 도플러 추정을 통해 프레임 시작위치를 알고 있다고 가정할 수 있기 때문에 가 제거되었으며, 일반적으로 잔존 도플러 편이는 이므로, 프리앰블 심볼 구간 동안 심볼길이의 변화는 무시할 수 있다. Eq. (9)에서 잔존 도플러 편이를 추정하는 것은 알고 있는 기저대역 신호 의 공액복소수를 곱하고, 프리앰블구간에서의 위상차를 이용하여 계산하는 여러 주파수편이 추정방법을 통해 얻을 수 있다.[10]
본 논문에서는 프리앰블 심볼이 다음절에 설명하는 것과 같은 Constant Amplitude Zero AutoCorrelation (CAZAC) 특성을 갖는 심볼열을 사용하고, 이를 두 번 반복해서 보내는 프리앰블 구조를 사용하므로, 도플러 편이는 다음과 같이 추정할 수 있다.
여기서
이고, k는 칩심볼 단위로 이고, L은 프리앰블의 길이이고, 는 칩심볼 시간이고, 은 복소수 의 위상을 얻는 연산이다. Eq. (10)과 같이 잔존 도플러 편이를 추정하는 경우, 를 프리앰블 길이만큼 더하는 연산에서 프리앰블 신호의 CAZAC 특성에 의해 다중경로 성분들이 제거되어 다중경로에 의한 영향이 감쇄하는 특징이 있다. 또한, 올바른 추정을 위해 잔존 도플러 편이는 Eq. (12)와 같은 범위여야 한다.
1단계 도플러 편이 추정값과 2단계 도플러 편이 추정값을 더하여 최종 도플러 편이를 추정하고, 이 값에 따라 프리앰블부터 한 패킷 구간에 걸쳐 리샘플링과 도플러 편이에 의한 주파수 편이 보상의 단계를 거치는 기저대역 도플러 편이 보상을 수행한다.
3.3 Frank 신호열
Frank 신호열[11]은 신호열 생성을 위해 사용하는 다중위상의 수가 M일 경우, 그 길이가 인 다중위상 (Polyphase) 신호열 중 하나이고, CAZAC 특성을 갖는다. M = 4인 QPSK 위상을 사용하는 경우, 그 길이가 16이되고, M = 8인 8-PSK 위상을 사용하는 경우, 그 길이는 64가 되며 각각의 신호열의 위상 인덱스는 Table 1과 같다.[11] 신호열의 위상값은 Table 1의 위상 인덱스에 을 곱한 값이다. Frank 신호열은 Table 1에서와 같이 위상 증가량이 M개 단위로 계단형태로 구성되어 LFM 신호의 이산 근사 신호로 생각할 수 있어 도플러에 강인한 특성을 갖는다.[10] 이러한 특성을 고려하여, 본 논문에서 설명하는 수중통신에서는 길이가 64인 Frank 신호열을 프리앰블 신호로 사용하고, 길이가 16인 Frank 신호열은 데이터 변조시 확산부호로 사용한다. 즉, 데이터 패킷의 프리앰블 부분은 8PSK 신호를 사용하고, 데이터 부분은 QPSK신호를 사용한다.
IV. 해상 실험환경 및 결과
4.1 실험 데이터 구성
해상에서 취득한 실험 데이터를 이용하여 제안한 도플러 편이 추정 방법을 적용한 직접수열 대역확산 전송 기반의 수중이동통신기법에 대한 기능검증을 수행하였다. 실험 데이터는 여러 가지 조합의 신호를 연결하여 56 s의 길이를 가지며, 이 중 본 논문과 관련된 실험 데이터의 패킷 구조는 Fig. 4와 같다. Fig. 4에서 각 블록의 길이를 데이터 심볼길이(T)를 기준으로 표시해 두었다. 두 번 반복되는 LFM신호(chirp #1과 chirp #2)는 실험 데이터의 시작부분을 검출하기 위해 두었으며, 두 번째 LFM신호(chirp #3)는 채널임펄스 응답을 측정하기 위해 두었다. Chirp 신호들은 모두 동일한 신호를 사용하였다. 데이터 패킷은 ramp-up 심볼, 프리앰블 심볼, 데이터 심볼, 포스트앰블 심볼, 다른 데이터 심볼로 구성되어 있다. 데이터 패킷의 프리앰블 심볼부터 포스트앰블 심볼까지의 데이터 패킷에 대한 상세 파라미터는 Table 2에 있다. Ramp-up 심볼은 PSF의 상승시간을 위해 16 칩(1 T 길이)의 심볼을 두었으며, 이 심볼은 64칩 길이의 프리앰블의 마지막 16칩 심볼을 사용하였다. 프리앰블은 8-PSK 신호를 갖는 64칩 길이의 Frank 신호를 두 번 반복하고(프리앰블 1과 프리앰블 2), 프리앰블 3은 64칩 길이의 Frank 신호 중 앞부분의 32칩 길이의 신호열을 사용하였다. 프리앰블 1과 프리앰블 2는 동기 및 도플러 편이 추정을 위해 사용하고, 프리앰블 3은 다중경로 및 데이터 심볼의 영향을 감소시켜 동기 및 도플러 편이 추정의 정확도를 높이기 위해 포함하였다. 데이터 심볼은 DQPSK 신호셋을 가지며, QPSK 성상도를 갖는 16칩 길이의 Frank 신호로 확산하였으며, DQPSK 복조를 위한 초기 위상 심볼을 포함하여 516 심볼 길이를 갖도록 하였다. 포스트앰블은 프리앰블과 같은 64칩 길이의 Frank 신호를 사용하였으며, Reference [7]의 도플러 편이 추정방법을 사용한 결과와 비교하기 위해 두었다.

Table 2.
Data packet parameters of experiment.
4.2 실험 환경
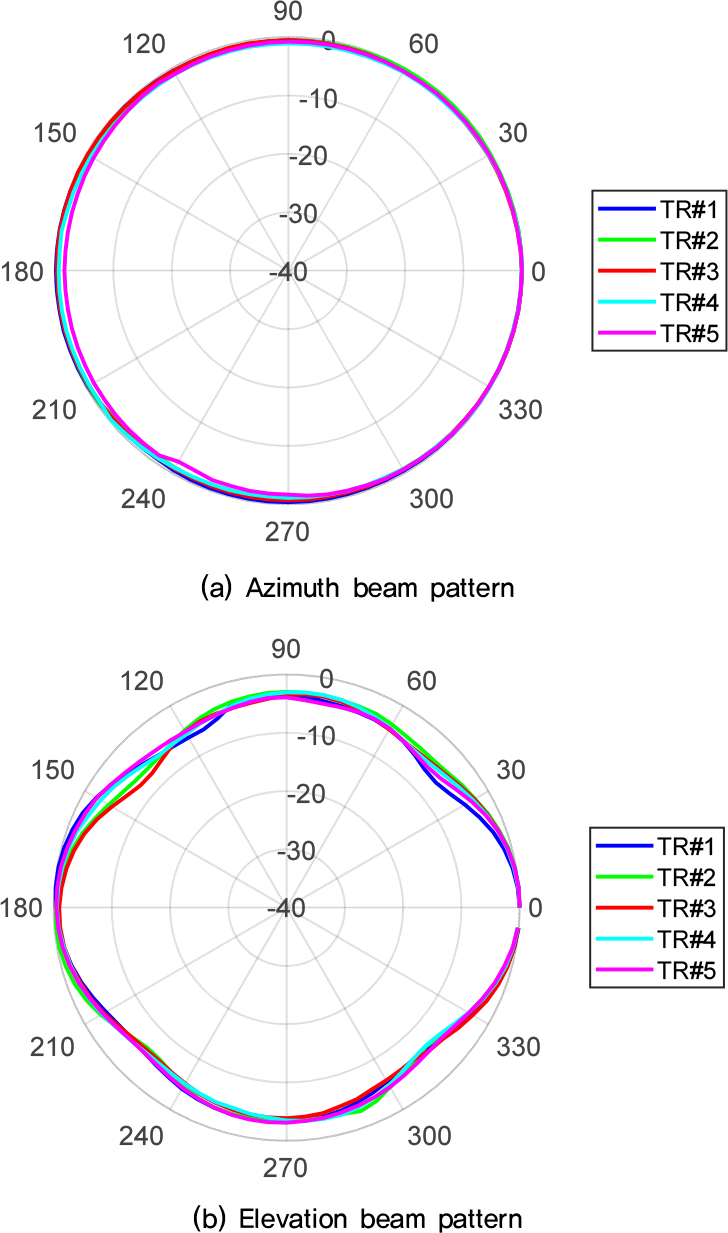
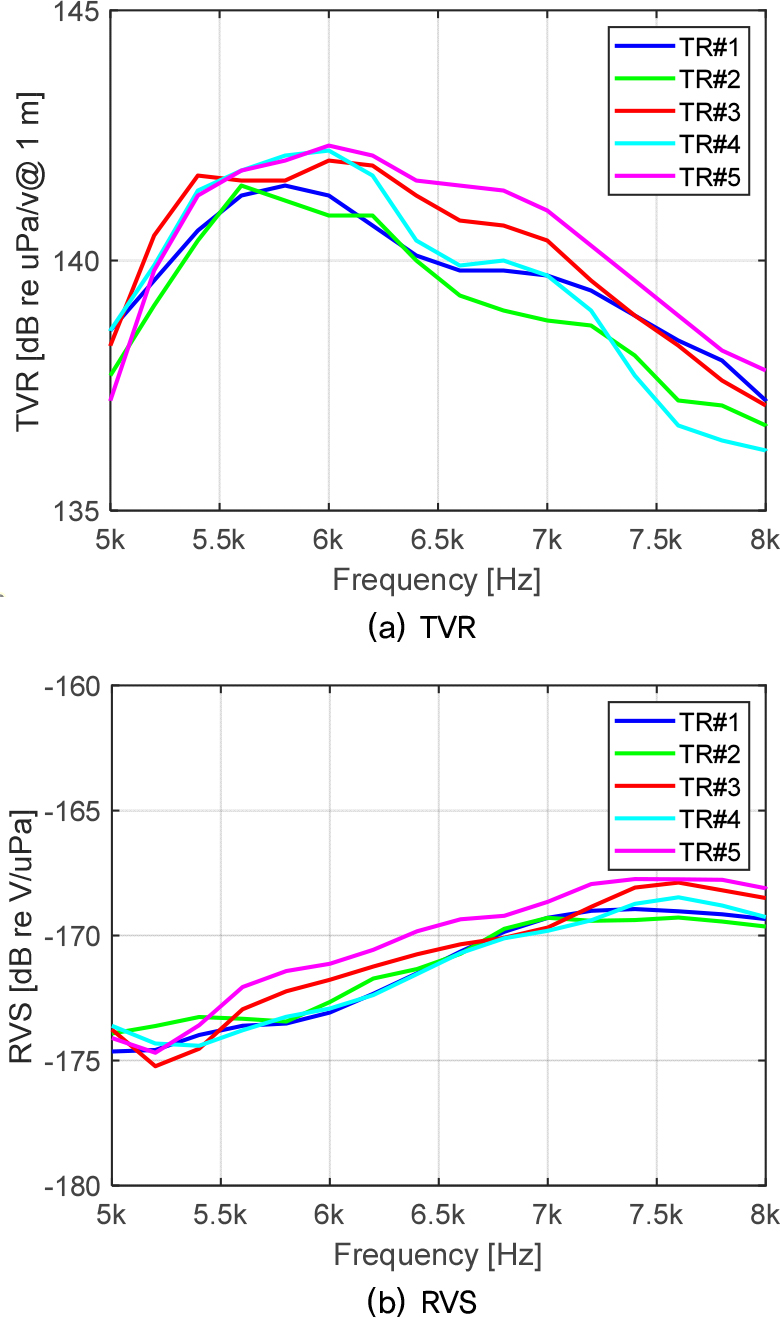
해상 시험을 위한 송수신기는 Fig. 5의 선박해양플랜트연구소에서 장거리 수중통신모뎀으로 제작한 플랫폼을 사용하였다. 이 플랫폼은 4개의 센서를 수직 방향으로 배열하였으며, 배열 센서를 구성하는 각 센서는 수평방향으로는 Fig. 6(a)와 같이 무지향성을 가지며, 그 편차는 최대 2.3 dB, 평균 1.3 dB이고, 수직방뱡으로는 Fig. 6(b)와 같은 빔패턴을 가지며 , 6.5 kHz에서 송신전압감도는 Fig. 7(a)와 같이 140 ± 1.4 dB re uPa/V@1 m이었으며, 수신전압감도는 Fig. 7(b)와 같이 –168 ± 2.1 dB re V/uPa이다.

송신 신호는 100 kHz의 샘플링 주파수를 갖도록 생성하였으며, 실험에서는 송신 최대 출력의 20 %를 사용하여 신호를 송신하였다. 가상으로 통신 노드가 이동하는 것으로 모사하기 위해, 송신 신호의 DAC 변환 주파수를 낮추어 신호를 송신하도록 하였다. 장거리 모뎀 플랫폼은 25.6 MHz의 클럭을 입력받고, 256클럭마다 DAC 샘플링 클럭을 생성하여 100 kHz의 샘플링을 수행하는데, 샘플링 클럭의 발생 주기를 변경하여 송신 신호의 샘플링 주파수를 100 kHz보다 낮아지도록 하였다. 실험에서 사용한 송신신호 발생주기는 256 클럭부터 259 클럭까지 사용하였으며, 이때의 도플러 편이는 Table 3과 같다. 수신부에서는 수신한 신호를 100 kHz로 샘플링하여 데이터를 취득하였다.
Table 3.
Doppler shift and its equivalent relative moving speed according to the clock division rate.
|
Clock Division rate | Doppler shift | Equivalent moving speed (m/s) |
| 256 | 0 | 0 |
| 267 | 1/256 | ~ 5.8 m/s |
| 268 | 2/256 | ~ 11.7 m/s |
| 259 | 3/256 | ~17.5 m/s |
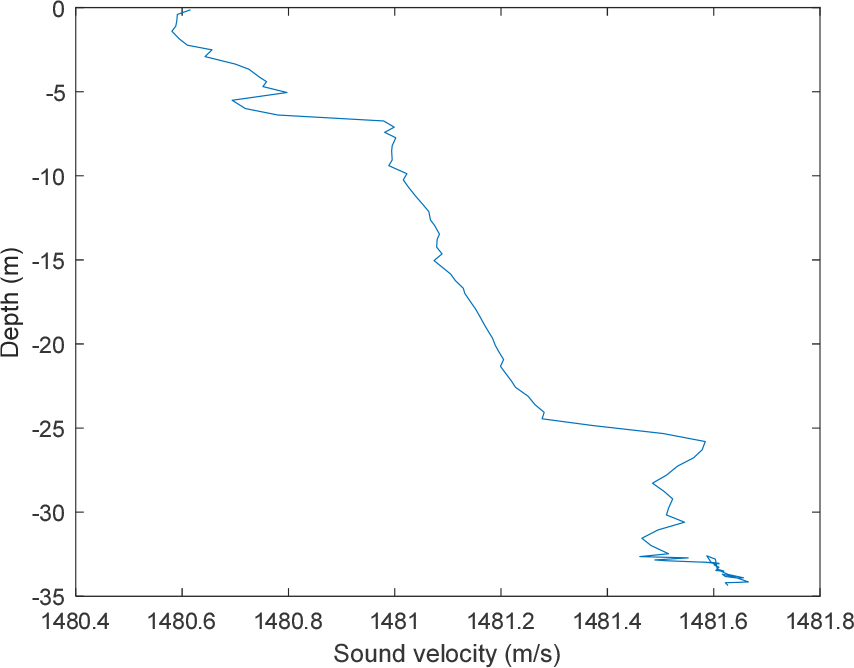
실험은 2019년 1월에 거제도 칠천도 인근 진해만에서 두 척의 선박을 이용하여 수행하였다. 한 선박에서는 송신을 하고, 다른 선박에서는 데이터 취득을 하였으며, 두 선박은 약 5 km 거리에서 앵커링을 하였다. 실험 해역의 수심은 약 35 m이고, 송신부와 수신부 모두 해수면에서 약 10 m 깊이에 설치하였다. 실험해역의 음속분포는 Fig. 8과 같이 수심이 깊어지면서 조금씩 빨라지기는 하지만 약 1,481 m/s로 거의 일정한 값이 측정되었다.
4.3 데이터 분석
100 kHz로 취득한 데이터를 Fig. 2에서와 같이 데시메이션하여 25 kHz로 샘플링한 신호로 변환하여 처리하였다.
Fig. 4의 chirp #1과 chirp #2 부분을 검출하여 취득 데이터에서 데이터 시작부분을 검출하고, chirp #3 부분을 이용하여 송신신호 발생주기에 따른 채널응답을 분석한 결과를 Fig. 9에 나타내었다. 신호의 송신주기가 56 s이므로, 채널 응답도 56 s 간격으로 표시되며, 약 900 s 동안의 취득 데이터를 분석한 결과를 나타내었다. 송신신호 발생주기가 256인 경우, 측정시간동안 주요경로의 도달시간이 약 3 ms 변경되는 것이 측정되었으며 이는 바람 및 조류의 영향 등으로 선박의 위치가 변경된 영향으로 추정된다. 또한, 채널응답의 크기가 시간에 따라 변하고 있음을 관찰할 수 있다. 송신신호 발생주기가 257부터 259의 경우, 시간이 증가함에 따라 채널응답함수의 지연이 발생주기에 비례하여 지연되고 있음을 확인할 수 있다.
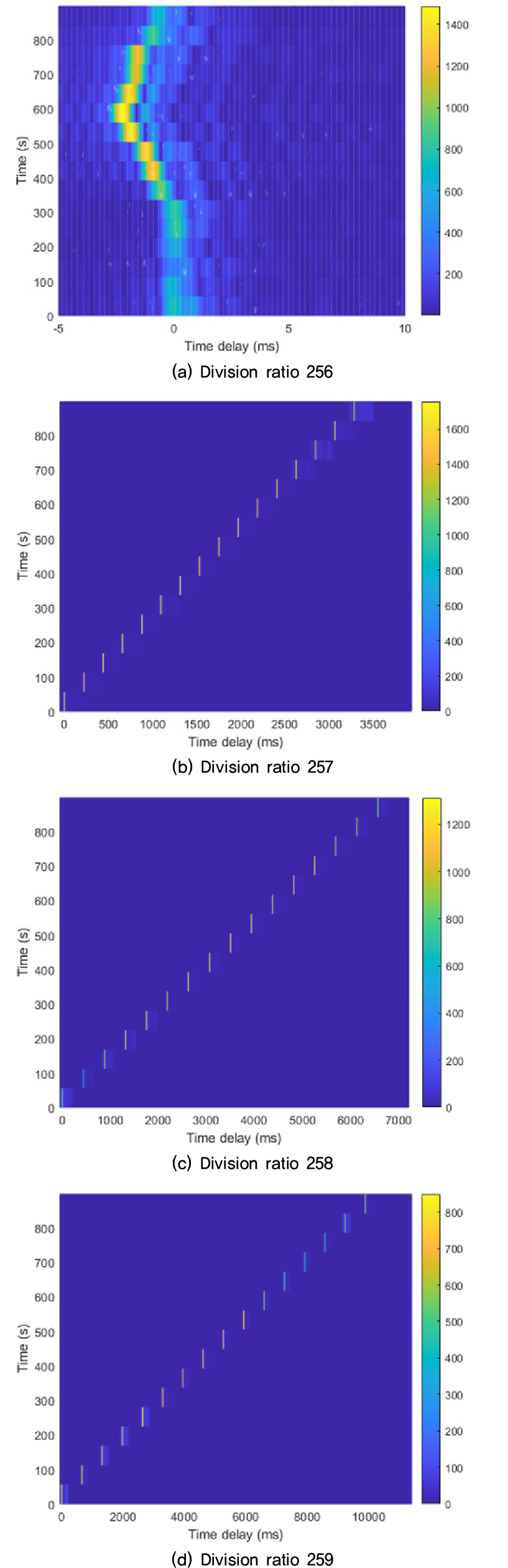
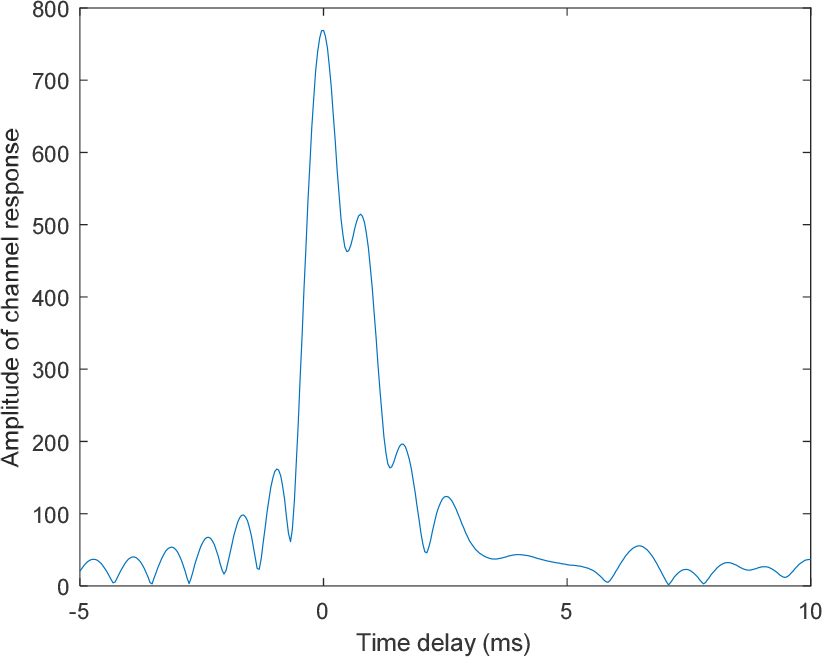
Fig. 10에 송신신호 발생주기가 256인 경우에 대한 채널순시응답을 나타내었다. 전달거리가 약 5 km 이고, 수심이 35 m 내외의 천해역이라 주요경로를 기준으로 다중경로들이 중첩되어 있고, 그 지연은 3 ms내외임을 확인할 수 있다.
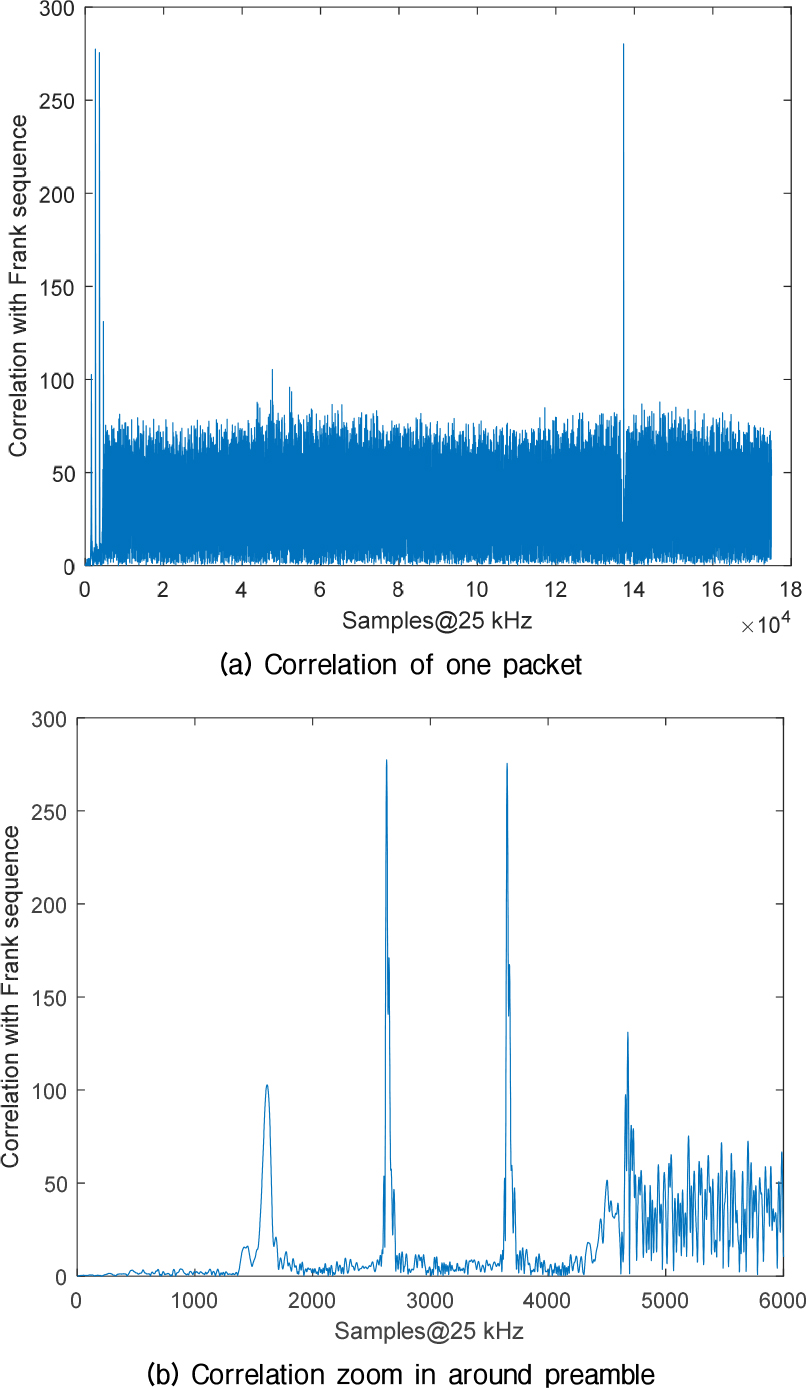
1단계 도플러 편이 추정을 위해 프리앰블 심볼열과 수신 패킷의 상관값을 계산한 결과는 Fig. 11과 같다. Fig. 11(a)는 한 패킷 구간에 대한 상관값을 계산한 결과이고, (b)는 프리앰블 구간을 확대하여 그린 것이다. 3.2절의 절차에 따라 Fig. 11(b)에서 큰 값을 갖는 두 개의 구간사이의 시간 차이를 계산하여 1단계 도플러 편이를 추정하고, 2단계 및 최종 도플러 편이를 추정하였다.
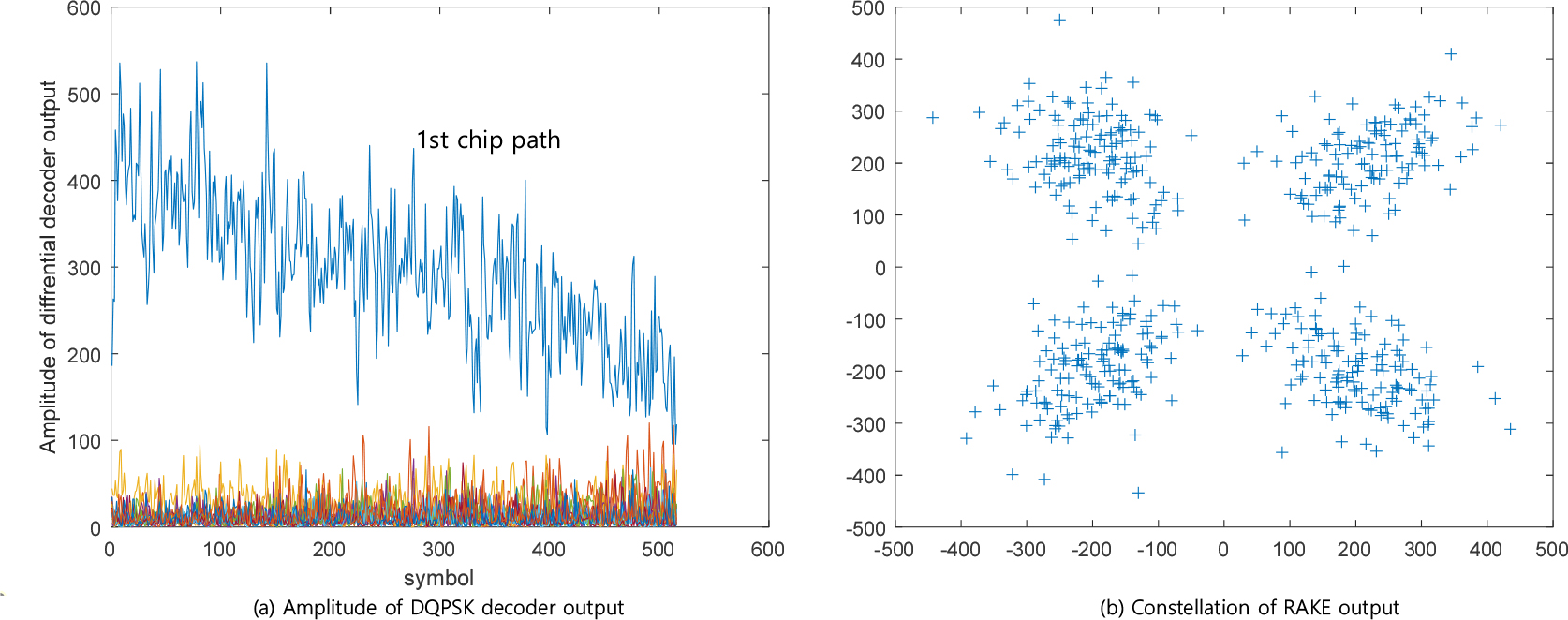
16개의 패킷을 포함하는 가상 이동신호 취득 데이터를 이용한 도플러 편이 추정 결과를 Figs. 12, 13, 14, 15에 나타내었다. 비교를 위해 Reference [6]에서와 같이 프리앰블부터 포스트앰블까지의 길이를 이용하여 도플러 편이 추정값과 제안한 추정방법의 1단계만 적용한 경우 및 2단계까지 적용한 경우의 추정값을 함께 나타내었다. 제안한 도플러 추정방법의 1단계만 적용하는 경우, 한 샘플 범위에서 오차가 발생하였다. 이는 채널순시응답의 변화 및 배경잡음 등에 의한 것으로 추정된다. 프리앰블의 길이는 1024샘플이므로, 1단계 추정에서 한 샘플의 오차로 인해 Figs. 12, 13, 14, 15에서 보듯 1/1024만큼 도플러 편이 추정오차가 발생한다. Figs. 12, 13, 14, 15에서 1단계만 적용한 경우, 16개 패킷 중 1개에서 5개의 패킷이 한 샘플의 오차가 발생한 것을 확인할 수 있다. 또한, 1단계에서 추정한 도플러 편이 추정 오차는 2단계에서의 추정을 통해 보상됨을 확인할 수 있다. 이는 잔존 도플러 편이의 크기가 2단계에서 추정 가능한 범위 이내에 있지 때문이고, 추정 가능한 잔존 도플러 범위는 Eq. (12)에 Table 2의 파라미터를 대입하여 2/1024이내로 계산할 수 있다. 또한, 도플러 편이 추정 결과를 보면, 도플러 편이가 증가할수록 Reference [7]의 기존방법으로 추정한 것과 제안한 방법으로 추정한 결과의 차이가 증가하는 경향을 보임을 확인할 수 있다. 송신신호 발생주기가 259인 경우에 기존방법과 제안한 방법에서 추정한 값을 동일한 패킷에 적용하여 신호처리한 예가 Figs. 16과 17에 있다. 각각의 그림에서 (a)는 Fig. 3에서 DQPSK 복호를 수행한 각 가지의 출력신호의 크기를 그린 것이고, (b)는 RAKE 결합기 출력의 성상도를 그린 것이다. Figs. 16(a)와 17(a)에서 가장 큰 크기를 갖는 경로를 첫 번째 칩경로로 표시하였으며, n번째 칩 경로는 첫 번째 경로와 (n-1)칩 길이만큼 도달 시간차가 있는 다중경로이다. Figs. 16과 17에 해당하는 패킷 구간에는 두 개의 경로가 2 칩 간격으로 존재하였으며, 1 번째 칩 경로는 가장 큰 에너지를 갖는 경로이고, 3번째 칩 경로는 1번째 칩 경로에 비해 약 1/2 크기를 갖는다. Fig. 16의 기존방법을 적용한 결과를 보면, 패킷의 시작부분에서는 1번째 및 3번째 칩 경로에서 큰 크기의 신호가 나오다 시간이 지남에 따라 그 크기가 점점 감소하고, 옆에 있는 2번째 및 4번째 칩 경로의 크기가 점점 커지는 것을 확인할 수 있다. 이는 도플러 편이 추정의 오차로 인해, 수신신호처리에 사용되는 신호가 원래 신호에 비해 지속적으로 늘어지고 있음을 의미하고, 이로 인해 RAKE 수신기 출력 신호의 성상도는 Fig. 16(b)와 같이 ‘X’자와 같은 형태가 되어 패킷의 뒷 부분에서 오류가 많이 발생하는 현상을 보인다. 반면, 제안방법을 적용한 결과인 Fig. 17(a)를 보면 1번째 및 3번째 칩 경로에서 큰 에너지가 나오는 것이 유지되고, RAKE 결합기 출력인 Fig. 17(b)에서와 같이 오류없이 데이터를 복원할 할 수 있다.
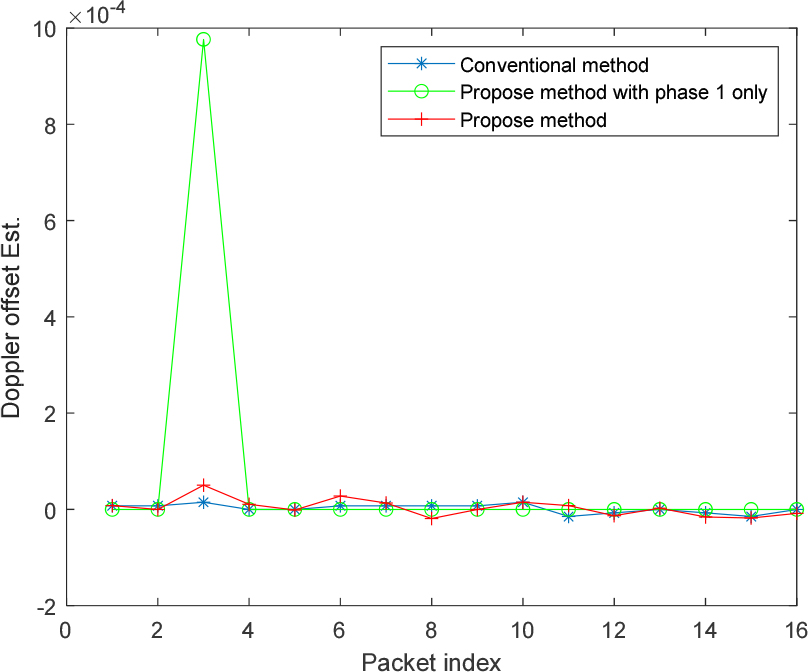
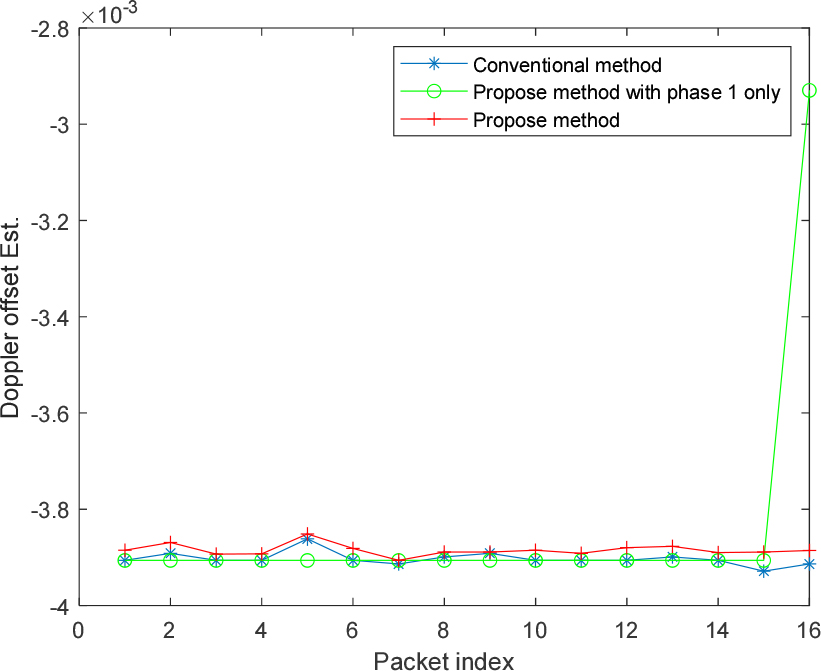
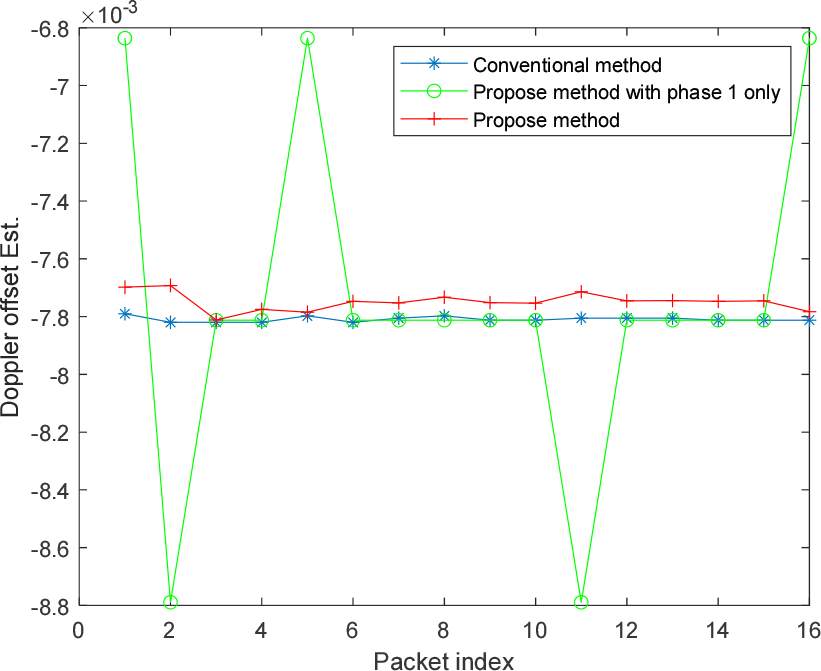
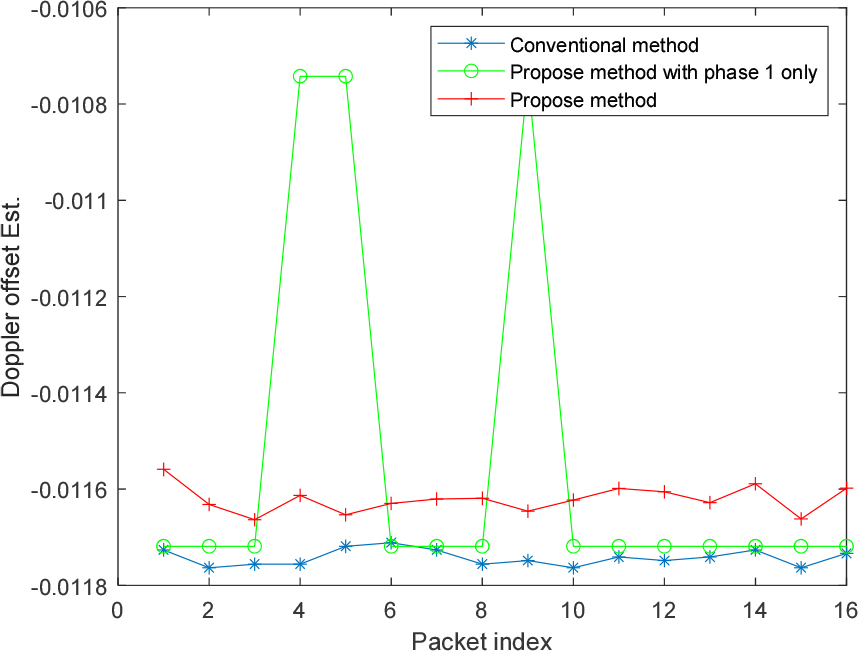
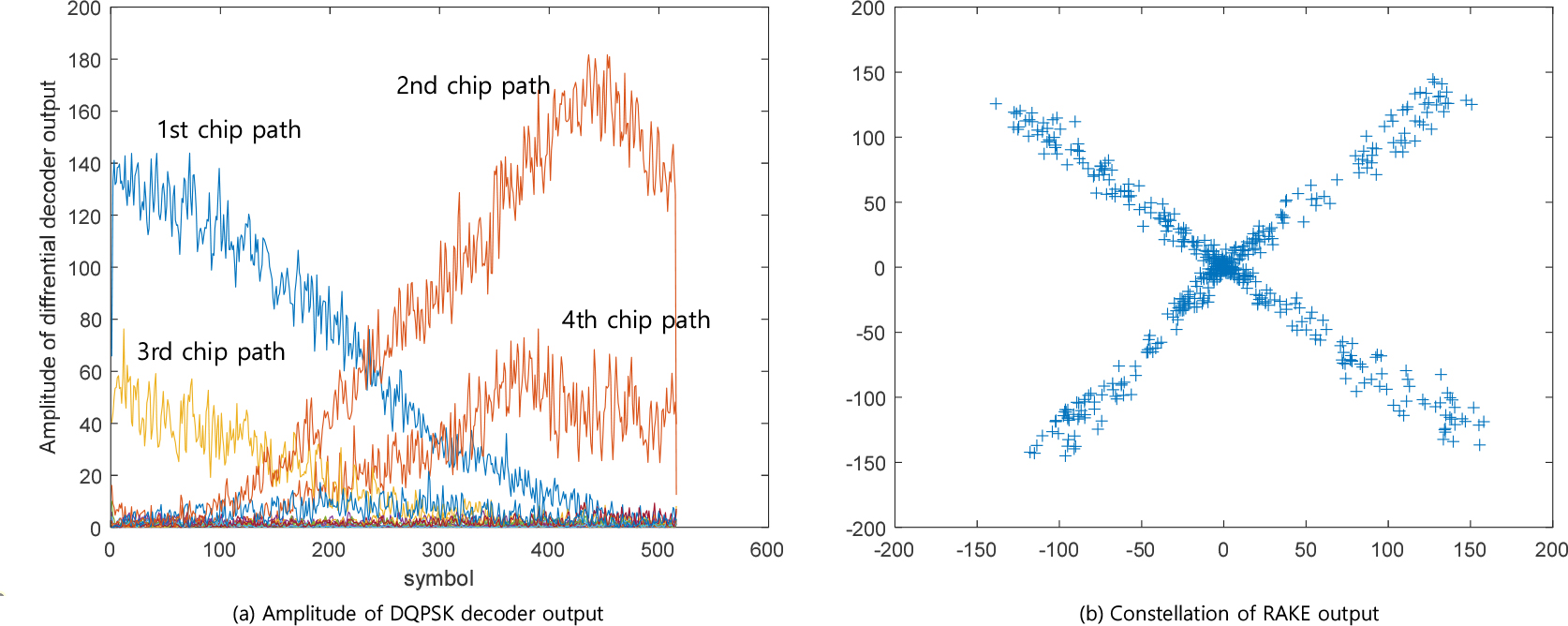
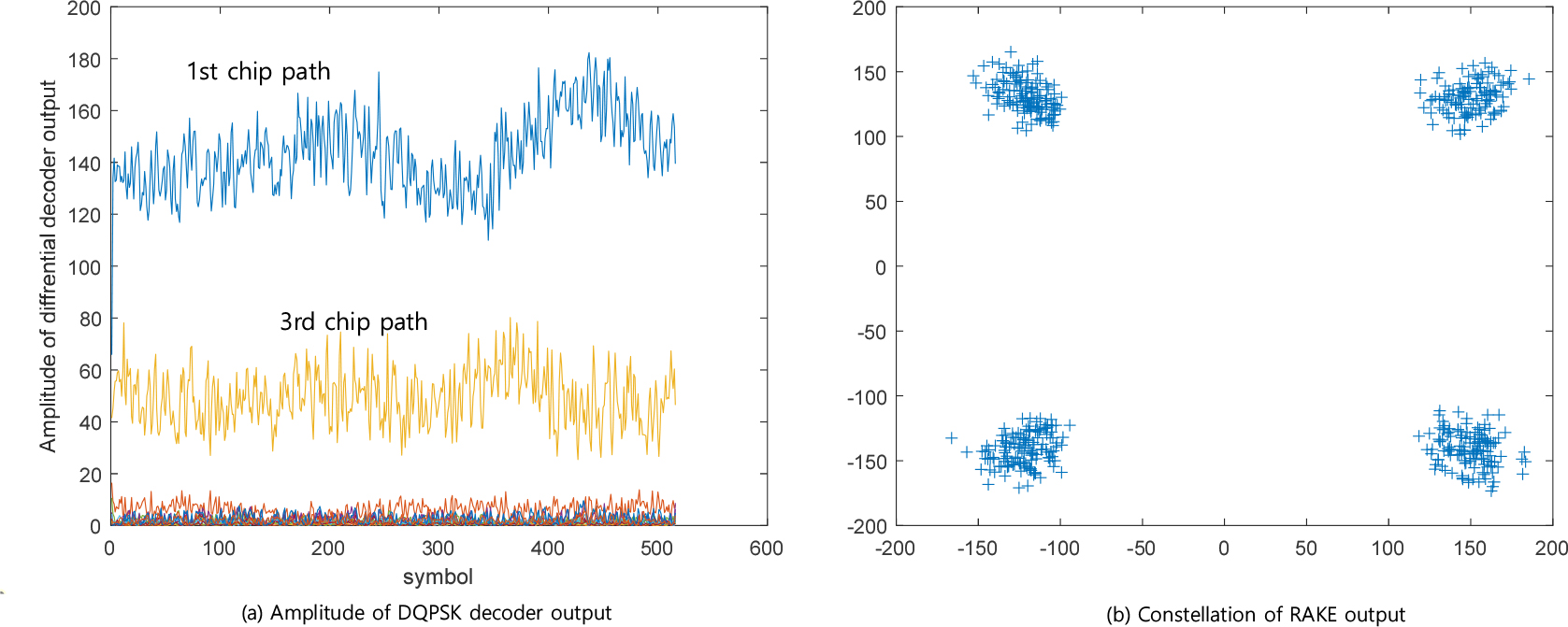
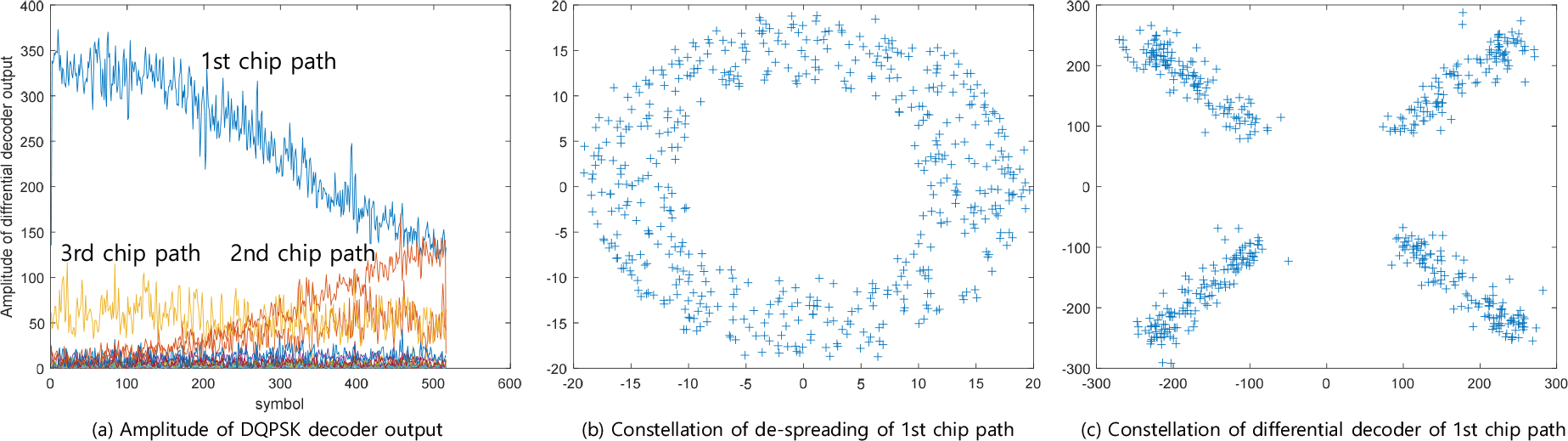
Fig. 18에 신호발생주기가 259인 경우, 패킷의 데이터 중간 부분에서 도플러 편이가 바뀌는 경우에 대한 수신기 동작의 예를 보였다. Fig. 18(a)를 보면, 패킷의 데이터 시작부분에는 1번째 칩 경로가 큰 크기를 가지나, 약 150 심볼부터 1번째 칩 경로의 크기가 감소하고, 2번째 칩 경로의 크기가 증가함을 확인할 수 있다. 이는 약 150 심볼부터 바람 및 해류 등의 영향에 의해 선박이 이동하여 도플러 편이가 변한 것을 의미한다. Fig. 18(b)는 1번째 칩 경로에 대한 역확산 연산의 출력을 성상도로 표시한 것이다. Fig. 18(a)과 같이 시간이 지남에 따라 1번째 칩 경로의 크기가 감소하고, 도플러 편이 보상 오차에 의해 주파수 편이가 발생하여, 신호 성상도는 Fig. 18(b)와 같이 도넛모양을 하고 있다. Fig. 2의 절차에 따라 Fig. 18(b)의 역확산 신호를 차동복호기 입력으로 넣었을 때, 출력 신호의 성상도를 Fig. 18(c)에 나타내었다. 본 논문의 수중통신방법은 DQPSK를 사용하므로, Fig. 18(c)와 같은 성상도를 갖는 신호를 이용하여 오류 없이 데이터를 복원할 수 있다. 이는 DQPSK 에서는 연접한 신호의 위상차에만 정보가 전달되고, 수중에서 속도변화는 완만하게 이루어지기 때문에, 패킷 중간에 도플러 편이 변화하더라도 한 심볼길이에서의 위상변화는 크지 않기 때문이다. 그러나, 도플러 편이 변화에 따라 신호 칩 경로의 신호크기가 작아짐을 고려하여, 사용환경에 맞게 데이터 길이를 조정하는 것이 필요하다.
4종의 송신신호 발생주기별로 각각 16개의 패킷에 대해 RAKE 결합기의 출력을 강판정하여 비트오율을 측정한 결과, 258 클럭 주기를 갖는 경우의 한 패킷에서 2비트의 오류가 발생하였으며, 나머지 경우는 비트오류가 발생하지 않았다. 비트 오류가 발생한 경우의 DQPSK복호기의 출력신호 크기와 RAKE 결합기 출력의 성상도를 Fig. 19에 나타내었다. Fig. 19(a)의 DQPSK 복호기 출력신호의 크기를 보면, 단일경로성분만 존재하고, 전송 중간에 1번째 칩 경로 성분의 크기가 감소하여 패킷의 마지막 부분에서 비트오류가 발생하였음을 알 수 있으며, 다른 칩 경로의 크기 변화가 없으므로, 도플러 보상 오차에 의한 신호크기 감소가 아닌 1번째 칩 경로의 크기가 감소하여 발생한 것으로 분석된다.
이상에서, 제안한 도플러 편이 추정알고리즘을 적용한 RAKE 수신기는 간단한 알고리즘을 사용하면서도 17 m/s 이상의 이동속도에서도 직접수열 대역확산 신호를 수신할 수 있는 방법임을 해상에서 취득한 가상 이동 신호를 이용하여 검증하였다.
V. 결 론
본 논문에서는 수중통신 장치가 수중에서 고속으로 이동시 발생하는 도플러 편이를 극복하기 위한 도플러 편이 추정방법과 확산대역 변조 신호의 수신을 위한 신호처리 방법을 제시하였다. 도플러 편이 추정을 위해 프리앰블에 도플러에 강인하고, 자기상관특성이 우수한 64 길이의 Frank 신호열을 두 번 반복하고, 수신부에서 Frank 신호열과 상관값을 계산하여 두 신호열의 첨두값을 갖는 샘플시간 차이를 이용하여 1단계 도플러 편이를 추정하였다. 프리앰블 구간에 대해 1단계 도플러 편이 추정값을 이용하여 도플러 편이 보상을 수행 후, 두 개의 Frank 신호열과 상관값을 계산하고, 두 첨두 지점의 상관값의 위상차를 이용하여 2단계 도플러 편이를 추정하였다. 1단계와 2단계 도플러 편이 추정값을 더해 최종 도플러 편이를 추정하는 방법을 제안하였다. 또한, 데이터 심볼을 DQPSK 변조하여 수신시 위상 편이 추적이 필요 없으며, RAKE 결합시 별도의 연산 없이 동위상 결합이 되도록 하였으며, 데이터 심볼은 16 길이를 갖는 Frank 신호열을 이용하여 확산하였다. 이러한 구조는 수신부에 PLL 및 채널등화기를 포함하고 있지 않아 수신기 구조가 간단해 지는 장점이 있다.
제안된 수중이동통신 기법의 적용 가능성을 검증하기 위해 거제도 해역에서 이동성이 없는 경우부터 약 5.8 m/s의 간격으로 약 17.5 m/s의 이동속도까지 통신거리가 증가하는 방향으로 이동하는 4가지 경우를 가정한 가상 이동신호를 송신하고, 5 km거리에서 수신한 데이터를 분석하였다. 제안한 도플러 편이 추정방법을 포함하는 직접수열 대역확산 수신기는 간단한 알고리즘을 사용하면서도 약 17.5 m/s의 이동속도까지 성공적으로 수신하였다.
향후, 제안한 수중이동통신 기법을 통신노드가 이동하는 환경에 적용하여 검증하고, 채널 부호를 포함하여 실시간으로 동작하는 통신 시스템 구현을 진행할 예정이다.
