

I. 서 론
II. 수치해석기법
2.1 해석 대상 및 격자 구성
2.2 지배방정식 및 수치기법
2.3 FW-H 음향상사식 및 소음적분면 선정
III. 해석결과
3.1 유동해석 결과
3.2 소음해석 결과
IV. 결 론
I. 서 론
최근 기후변화와 해양생태계 보존에 대한 국제적인 관심이 증가하면서 조선업계에서는 친환경 저탄소 선박에 대한 기술개발이 활발히 이루어지고 있다. 특히, 국제해사기구인 International Maritime Organization(IMO)에서는 기후변화에 대응하기 위해 국제해양오염방지조약인 The International Convention for the Prevention of Pollution from Ships(MARPOL)을 통해 선박의 대표적 오염물질인 황산화물과 질소산화물, 탄소배출량에 대한 규제를 강화하고 있으며, 오는 2050년까지 온실가스 발생량을 2008년 대비 50 % 감축하는 것을 목표로 하고 있다.[1] 또한, 해양생태계를 보존하기 위해 수중소음을 대표적인 오염원으로 규정하여 2012년 International Convention for the Safety of Life at Sea(SOLAS)에서 제안된 규제방안들을 채택함으로써 수중 소음에 대한 규제도 강화하고 있다.[2,3,4]
이러한 추세를 반영하기 위해 국내에서는 친환경 엔진기관으로 기존의 재래식 디젤기관에서 액화천연가스(Liquefied Natural Gas, LNG)를 이용하는 방안을 채택하고 있으며, 기술이 고도화됨에 따라 최근에는 원동기로 디젤 전기추진과 가스터빈을 복합적으로 활용하는 COmbined Diesel-eLectric And Gas turbine(CODLAG) 및 COmbined Diesel-eLectric Or Gas turbine(CODLOG)와 같은 추진방식이 함정에 적용되고 있다.[5,6] 또한, 소형모듈원자로(Advanced Small Modular Reactors, SMRs)의 등장으로 차세대 친환경 추진시스템으로써 핵추진 선박[7] 및 잠수함에 대한 논의가 진행되고 있다.
이와 같이 고효율 추진체계의 개발은 기존에는 구조가 복잡하고 중량이 무거워 사용하기 어려웠던 고성능 펌프젯 추진기의 적용을 용이하게 하였으며, 주로 함정 및 어뢰, 잠수함과 같이 군사목적용 수중운동체에 선행적으로 적용되고 있다.[8,9]
펌프젯 추진기는 스테이터(Stator)의 위치가 로터(Rotor)의 앞에 위치하면 전류-스테이터 펌프젯(Pre-swirl stator pumpjet),[10] 로터 뒤에 위치하면 후류-스테이터 펌프젯(Post-swirl stator pumpjet)[11]이라고 하며, 전류-스테이터 구조에서는 선체 반류장과 같은 복잡한 유동구조가 스테이터를 통해 개선되어 로터로 유입되므로 추진효율이 향상되어 연료저감효과를 가지나 고속 회전 시 날개 끝 와류 공동(Tip vortex cavitation, TVC)이 형성되기 쉽다. 반면 후류-스테이터 구조에서는 로터에 의한 와류 성분이 스테이터에 의해 부서지므로 공동 생성이 억제되지만 추진 효율은 상대적으로 낮다는 한계가 있다.[12] 그러나 일반적으로 펌프젯 추진기는 공동 발생을 억제함으로써 덕트와 스테이터가 없는 일반 추진기가 지니는 공동 현상에 의한 높은 소음과 진동, 부식, 피로파손 및 추진효율 저하의 문제를 해결할 수 있으며, IMO의 소음규제를 극복하고 잠수함의 은밀성을 보장하기 위한 차세대 추진기로써 최근 활발한 연구가 이루어지고 있다.
1963년 McCormick과 Eisenhuth[13]는 전진비 변화에 따른 공동 성능 및 추진효율 변화를 이론적으로 제시하였으며, Suryanarayana et al.[14,15,16]은 축대칭 형태의 수중운동체를 대상으로 풍동과 캐비테이션 터널을 활용하여 펌프젯 추진기의 추진 성능을 실험적으로 관측하였으며, 전진비 변화에 따른 추력과 토크 변화에 대해 분석하였다.
그러나 설계의 어려움과 높은 제작단가로 인해 실험적인 연구보다는 주로 해석적 연구가 많이 이루어지고 있으며, 관련 연구로는 크게 펌프젯 설계,[17,18] 퍼텐션 이론에 기반한 성능 추정,[19] 펌프젯에서 발생하는 비공동 소음을 저감하기 위한 톱니형태의 덕트 형상 개발,[20,21] 그리고 스테이터와 로터 사이의 상호작용에 의한 부가적인 압력 섭동 및 소음에 대한 연구가 수행되고 있다.[22]
펌프젯 추진기에 대한 대부분의 연구는 국외에서 활발하게 이루어지고 있으나 국내에서는 전무한 실정이며, 최근 선박해양플랜트 연구소에서 펌프젯 추진기에 대한 실험적인 성능 추정기법을 개발하여 국내 펌프젯 추진기 개발의 기반을 마련하고 있다.[23]
이에 본 연구에서는 전류-스테이터 펌프젯을 대상으로 공동과 비공동 조건에서의 비압축성 Reynolds averaged Navier-Stokes(RANS) 해석기법을 적용하여 추진기 유동 소음원을 모사하였으며, FW-H 음향상사법을 이용하여 펌프젯 추진기에 의한 유동 소음을 예측하였다. 소음 적분면을 펌프젯의 스테이터와 로터, 덕트 표면으로 선정하여 각 구성품별 소음 기여도를 분석하였으며, 유동장 내 투과성 적분면을 선정하여 공동 소음원의 기여도를 분석하였다.
II. 수치해석기법
2.1 해석 대상 및 격자 구성
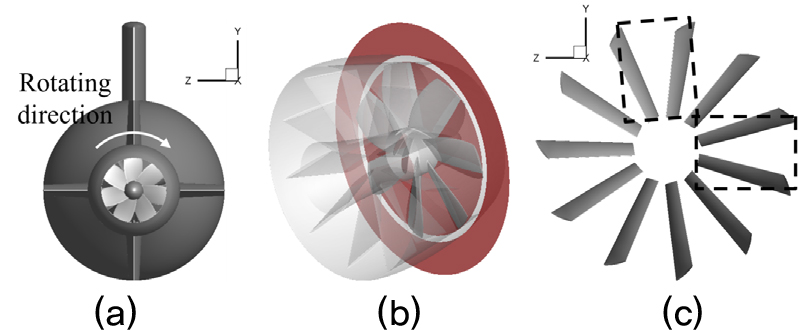
해석 대상은 The Defense Advanced Research Projects Agency(DARPA) 잠수함 선형과 연구 목적으로 설계된 펌프젯 추진기이며, 해석 영역은 Fig. 1과 같이 선박해양플랜트연구소에서 보유하고 있는 대형 캐비테이션 터널(Large Cavitation Tunnel, LCT)의 시험부[24]와 동일한 형상으로 선정하였다. 추진기의 로터와 덕트 사이의 간극은 0.5 mm이며, Fig. 2와 같다. 잠수함 선형과 펌프젯 추진기, LCT의 재원은 Table 1과 같다.
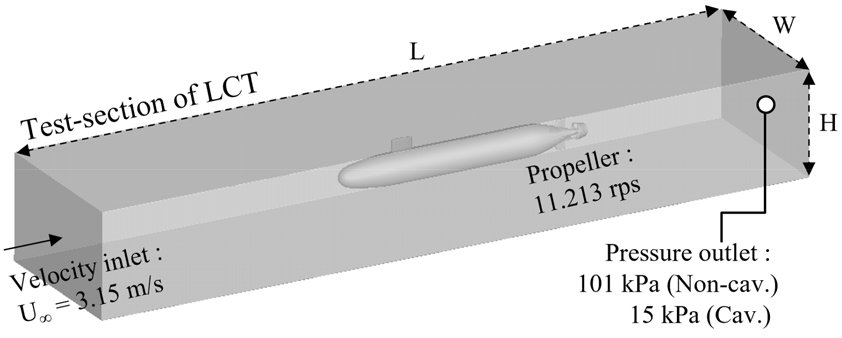
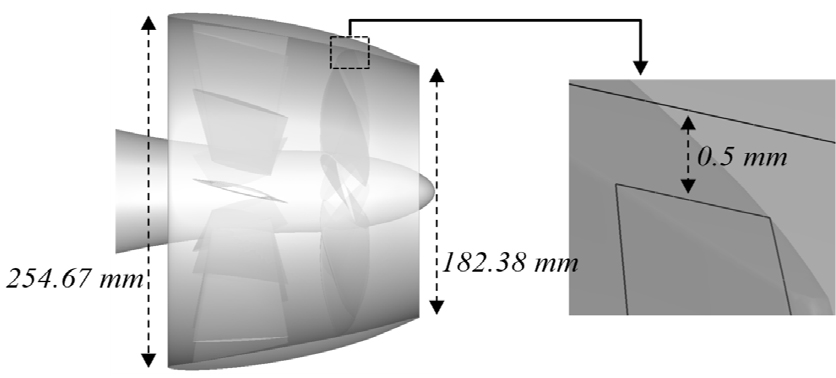
Table 1.
Specifications of simulation domain and geometries.
해석에 적용된 경계조건은 Fig. 1에 나타낸 바와 같이 입구에 속도, 출구에 압력조건이며, 비공동 조건일 경우 대기압, 공동 조건일 경우 15 kPa로 선정하였다. 추진기의 회전속도는 11.213 rps이며, 전진비는 1.34, 그 외 벽면은 모두 단열 조건을 적용하였다.
격자계는 Fluent Meshing 격자 생성 툴을 활용하여 Poly-Hexa 형태로 구성하였으며, Fig. 3과 같이 크게 LCT와 잠수함 선형을 포함하는 영역 1, 펌프젯 추진기를 포함하는 영역 2, 그리고 로터만을 포함하는 영역 3으로 구성된다. 영역 3에는 Sliding mesh 기법을 적용하였으며, 벽면 경계층을 잘 모사하기 위해 Prism layer는 7장을 적용하였다. 각 영역에 대한 세부적인 격자 수는 Table 2와 같다.
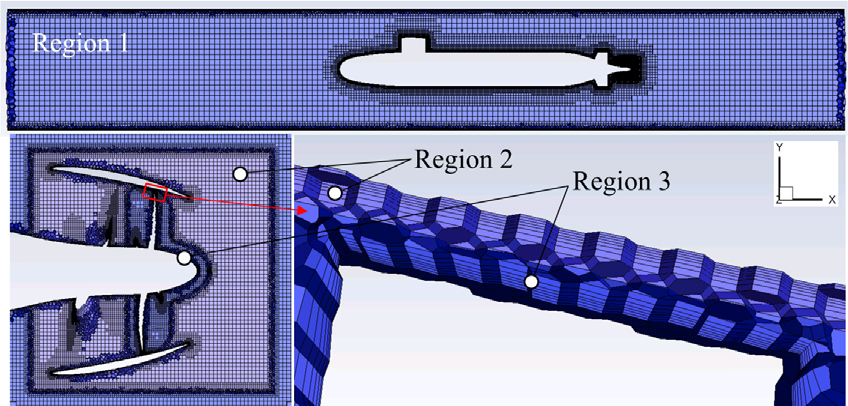
Table 2.
The number of grid in each region.
| Grid system | ||
| The number of grid | Region 1 | 5.3 M |
| Region 2 | 5.5 M | |
| Region 3 | 2.3 M | |
| The number of prism layer | 7 | |
| M : million | ||
2.2 지배방정식 및 수치기법
펌프젯 추진기에서의 공동과 비공동 조건에 대한 유동장을 모사하기 위하여 균일혼상류 가정의 비압축성 Reynolds Averaged Navier-Stokes(RANS) 방정식을 적용하였으며, 혼상류에 대한 연속 방정식과 운동량 방정식은 다음 식과 같다.
여기서 , , , 그리고 는 각각 밀도와 직교좌표계 상의 속도벡터, 점성계수, 압력 그리고 중력가속도를 의미하며, 하첨자 은 혼상류(Mixture)에 대한 물성치임을 의미한다.
각 상에 의한 혼상류의 물성치는 Eqs. (3), (4), (5)와 같이 모사되며, 는 각 상의 체적분율, 하첨자 과 는 각각 액상(Liquid)과 증기(Vapor)를 의미한다. 본 연구에서 적용된 액상에 의한 밀도와 점성계수는 각각 999.7 kg/m3, 0.001307 kg/m/s이며, 증기에 대한 밀도와 점성계수는 각각 0.0094 kg/m3, 9.4610-6 kg/m/s 이다.
공동에 의한 상변화를 모사하기 위해 체적분율에 대한 연속방정식을 기반으로 상경계면을 포착하는 Volume of Fluid(VOF) 방법을 적용하였으며, 증기 체적분율에 대한 연속방정식을 Eq. (6)에 나타내었다.
와 는 각각 기화(Evaporation)와 응축(Condensation)에 의한 각 상의 질량변화를 반영하는 상변화 소스항이며, Schnerr-Sauer의 공동 모델(Cavitation model)을 통해 모사된다.[25] 상변화가 발생하는 증기압은 1,304 Pa을 적용하였다.
유동해석은 ANSYS Fluent v22를 활용하였으며, 정상상태 단상 RANS 해석의 수렴값을 초기값으로 비정상 공동, 비공동 해석을 수행하였다. 해석에 활용된 수치기법은 압력 기반의 해석 솔버 내에서 Semi-Implicit Method for Pressure Linked Equations(SIMPLE) 기법이며, 시간에 대해 2차 정확도, 공간에 대해 2차 정확도의 풍상차분법을 적용하였다. 난류 모델은 k-ω SST 모델을 사용하였으며, 난류 에너지와 소산율에 대해 각각 2차 정확도의 풍상차분법을 적용하였다.[11,26,27] 해석에 적용된 시간 간격은 1° 회전에 해당하는 0.2477283 ms이며, 사용된 해석자원은 Message Passing Interface(MPI) 병렬처리에 기반한 Central Processing Unit(CPU) 48코어이다. 수렴 후 3회전 해석을 수행하였으며, 마지막 1회전 데이터를 활용하였다.
2.3 FW-H 음향상사식 및 소음적분면 선정
펌프젯 추진기에서 발생하는 수중방사소음을 예측하기 위해 Lighthill의 음향상사법에 기반한 복합 전산음향 해석기법을 적용하였으며, 각 소음원에 대한 음향상사식인 Ffowcs Williams and Hawkings 방정식은 다음과 같다.
여기서 상첨자 와 , 하첨자 , 와 o는 각각 섭동값과 단위벡터, 직교좌표계에서의 각 방향과 평균값을 의미하며, 과 는 각각 법선벡터와 크로네커 델타 함수이다. , 와 , 는 각각 수음점과 소음원의 위치, 관측시간과 지연시간이며, 와 가 성립한다. 과 , 는 각각 마하 수와 소음원 표면 및 체적에 대한 적분을 의미한다.
Eq. (7)에서 우측의 항들은 첫째 항부터 순서대로 시간에 따른 체적 변화의 가속도 성분에 기인한 단극(Monopole) 소음원, 소음원 표면의 압력섭동에 기인한 쌍극(Dipole) 소음원, 유동 내 난류 구조 변화에 기인한 사중극(Quadrupole) 소음원이다. 특히 사중극 소음원은 유동장 내 평균유속이 마하 수에 비해 매우 작을 경우 무시할 수 있는 반면 체적 적분에 기인한 계산 비용이 매우 높기 때문에 일반적으로 산업계에서는 해당 항을 생략한 Farassat 1A 공식이 많이 활용되고 있으며, 본 연구에서도 동일한 방법을 적용하였다.[28,29,30] Farassat 1A 공식에 기반한 소음 예측 내부 코드의 검증은 이전 연구를 통해 수행하였으며,[28,31,32] 본 연구에서는 동일한 코드를 활용하였다.
펌프젯 추진기의 각 구성품별 소음기여도를 평가하기 위하여 Fig. 4와 같이 크게 5가지 형태의 소음원 영역을 선정하였다.
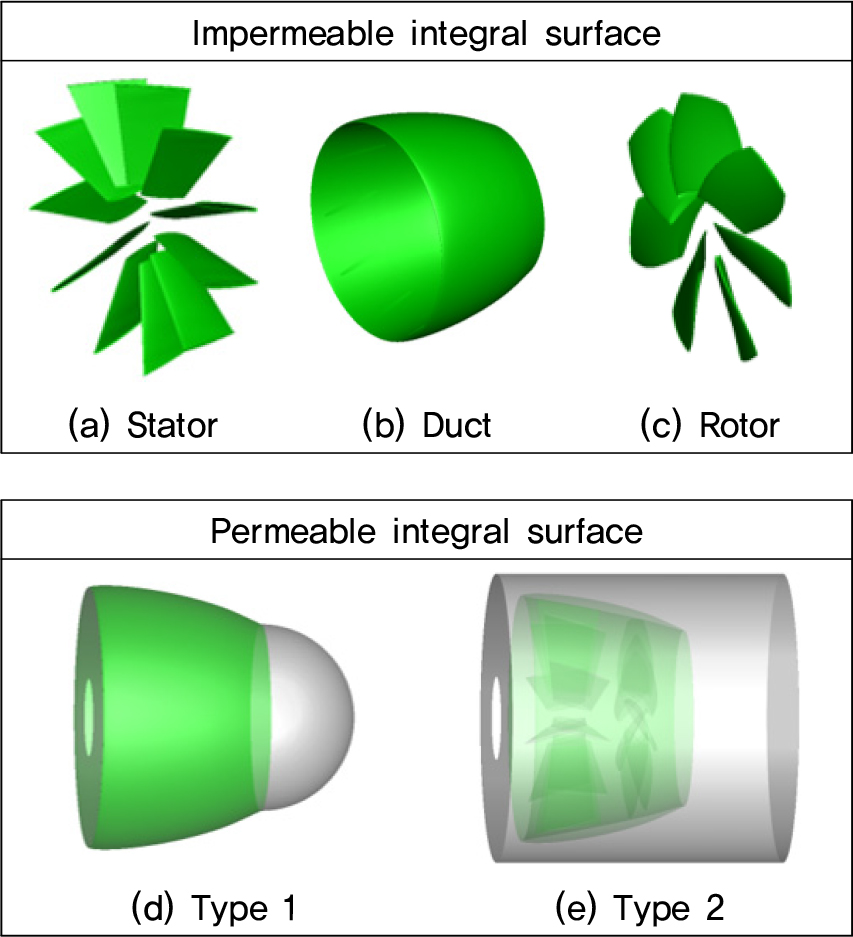
먼저 각 구성품의 기여도를 파악하기 위해 덕트와 스테이터, 로터의 표면을 소음원으로 선정하였다. 투과성 적분면은 적분면 내부 소음원들의 기여도를 적분면 표면에서의 단극과 쌍극 성분으로 표현가능하다는 이점이 있어[33] 본 연구에서는 유동장 내 공동 소음원의 영향을 반영하기 위해 Fig. 4(d), (e)와 같이 2가지 형태의 투과성 적분면을 선정하였다.
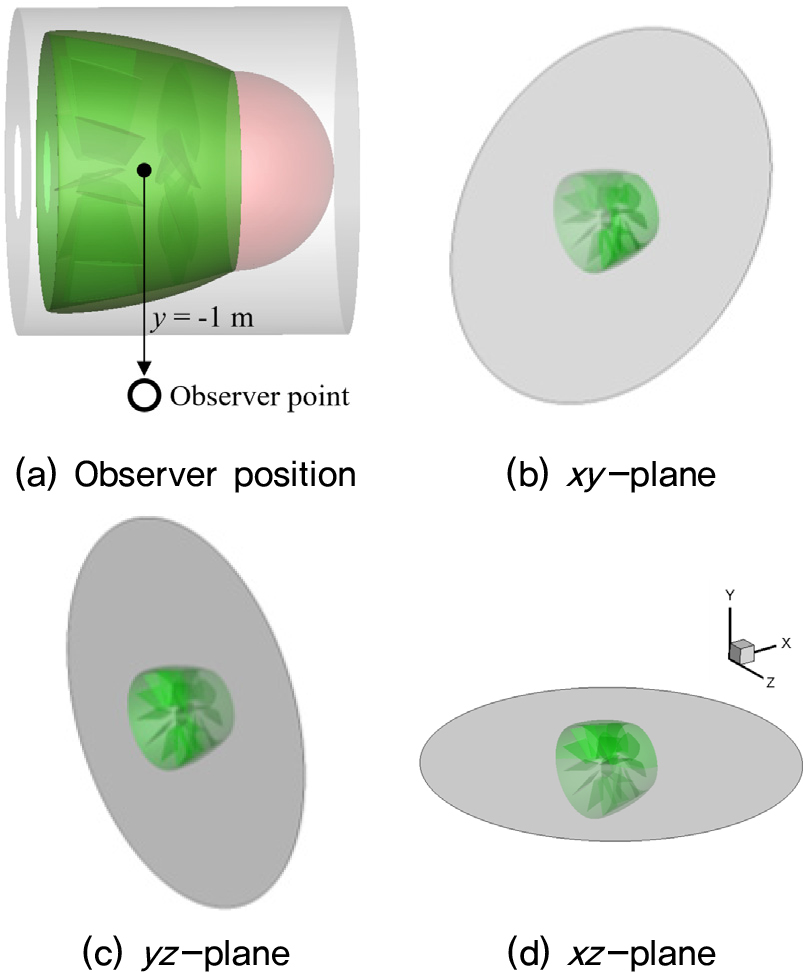
수음점의 위치는 추진기 중앙으로부터 하단으로 1 m 떨어진 지점으로 선정하였으며, 소음 방향성을 나타내기 위해 추진기 중앙으로부터 1 m 떨어진 지점에서 5° 간격으로 전체 음압을 예측하였다. 수음점의 위치와 소음 방향성을 도시하기 위한 평면들은 Fig. 5와 같다.
III. 해석결과
3.1 유동해석 결과
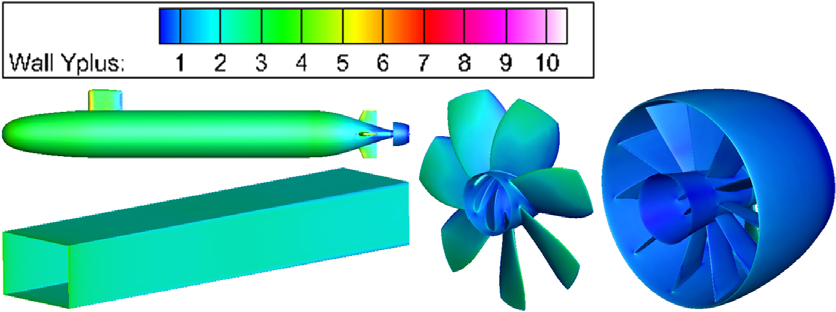
먼저 비공동 조건에서의 표면 분포는 Fig. 6과 같으며, 전체적으로 를 만족함을 알 수 있다.
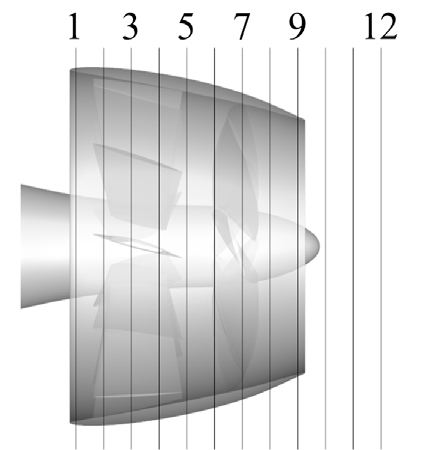
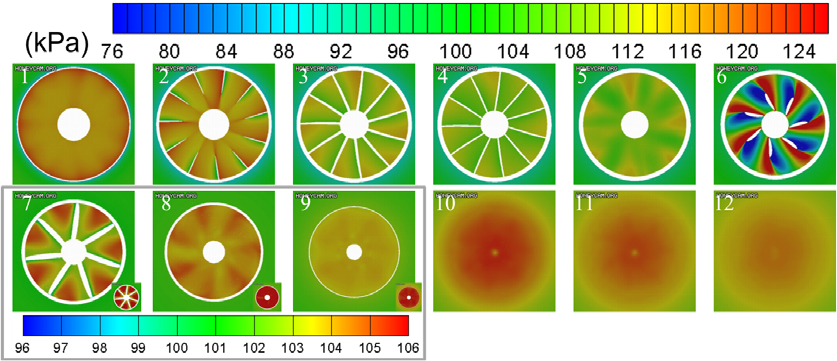
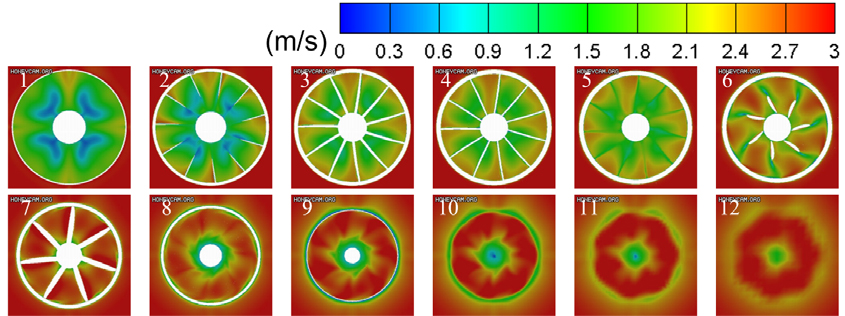
추진기 내부 유동장을 Fig. 7에 도시된 각 평면에 대해서 압력과 속도로 나타내었으며, 각각 Figs. 8, 9와 같다.
압력과 속도 유동장의 1번 절단면으로부터 잠수함 선체 러더 구조물에 의해 반류장이 형성되어 추진 내부로 유입되는 것을 알 수 있으며, 이후 스테이터에 의해 유동구조가 개선되므로 다시 유속이 가속되어 로터로 유입되는 것을 확인할 수 있다.
비공동과 공동 조건에서 비정상 RANS 해석 결과를 Fig. 10(a)의 방향에서 Fig. 10(b)의 절단면에 대해 Figs. 11과 12에 각각 나타내었으며, 압력과 유속에 대한 유동장 결과이다. Fig. 10(c)에 표시한 스테이터 위치의 하류방향에 해당하는 지점을 Figs. 11(a)와 12(a)에서 θ + 30°인 유동장에 표시하였다. 또한 압력면에서의 추진기 로터의 압력분포와 증기의 체적분율을 Fig. 13에 나타내었다.
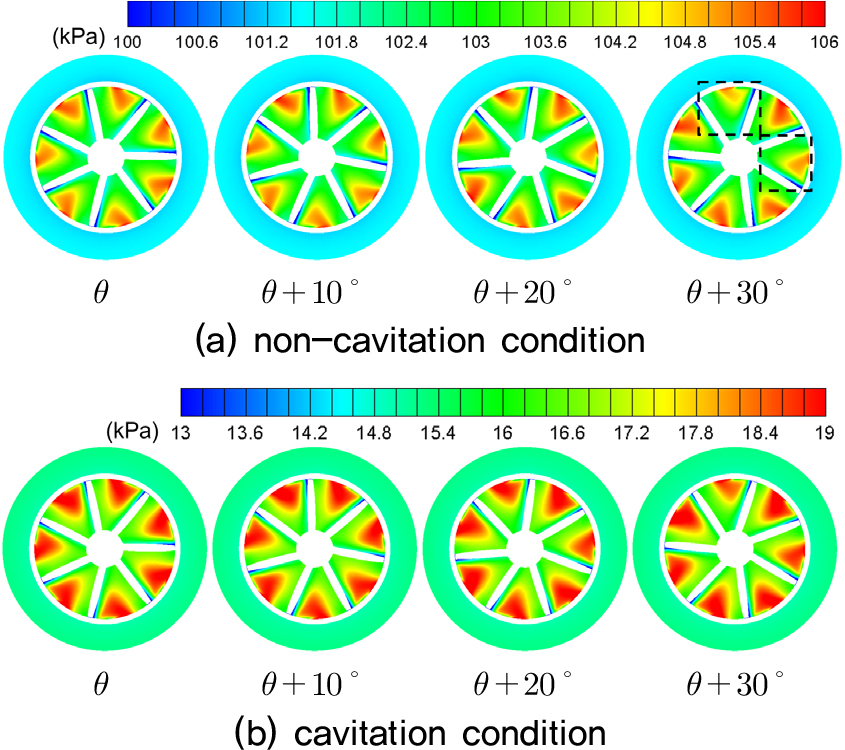
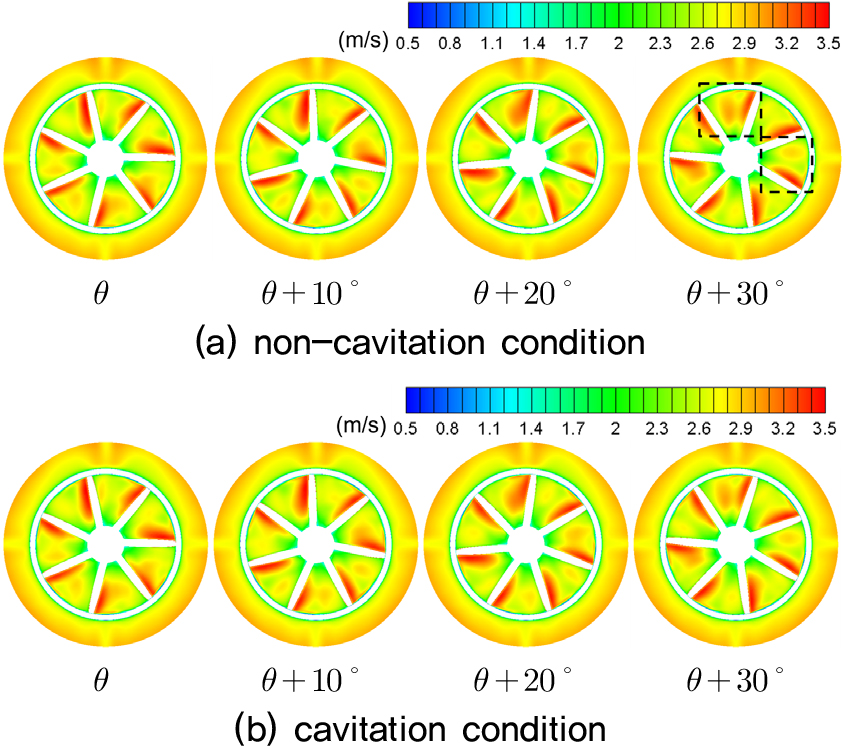
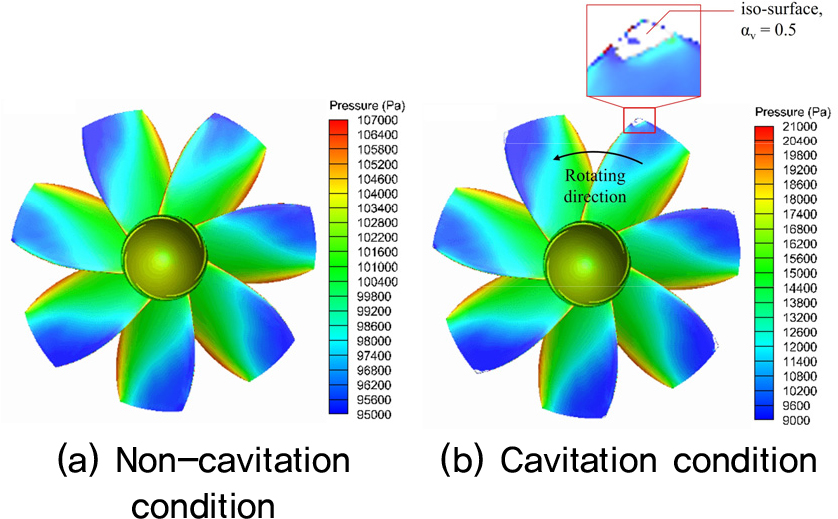
Figs. 11과 12로부터 공동과 비공동 조건 모두 연직 상방인 12시 방향에서 강한 섭동이 관측되며, 3시 방향에서도 약한 유동박리가 발생하고 있다. 또한 해당 영역들을 지날 때 날개 앞전 끝단에서 공동이 강하게 생성되는 것을 Fig. 13으로부터 알 수 있다.
이러한 현상은 스테이터 날개의 배치가 선체로부터 형성된 반류장이 그대로 유입되는 방향으로 설치되었기 때문으로 판단되며, 스테이터의 배치는 Fig. 10(c)와 같고 관련 유동장은 Fig. 9의 1 ~ 3번 평면으로부터 확인할 수 있다. 특히, 12시와 3시 방향에서 스테이터의 배치와 로터에서 유동 박리가 발생하는 위치가 동일함을 알 수 있어 스테이터 날개의 위치가 유동소음원 형성에 주요 설계 변수임을 알 수 있다. 유동 박리는 12시 방향에서 가장 강하게 발생하며, 이는 잠수함 선수부 함교에 의한 비대칭 유동장과 중력의 영향으로 판단된다.
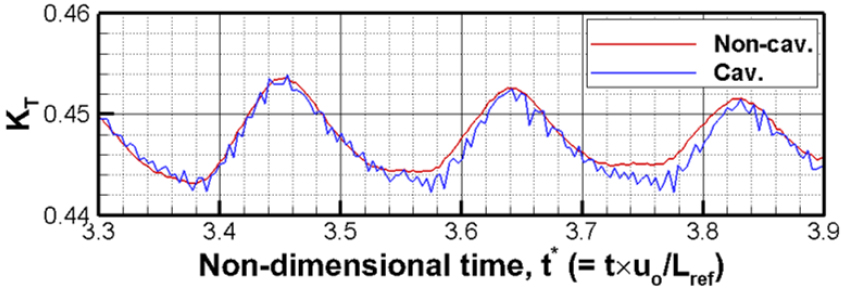
Fig. 14는 공동과 비공동 조건에 대한 추력계수(Thrust coefficient, KT)를 무차원 시간(t*)에 대해 나타낸 그림이며 관련 계수는 Eq. (8)과 같다. 여기서 T는 추력(N), t는 해석시간(s), 는 평균 유속이며, 와 은 추진기 로터의 직경이다. 거시적인 추력 변화는 두 경우 모두 유사하나 공동의 체적 변화에 의한 섭동 성분이 강하게 발생하는 것을 확인할 수 있다.
3.2 소음해석 결과
펌프젯 추진기의 각 구성품별 소음 기여도를 Figs. 15, 16, 17에 소음 방향성으로 도시하였으며, 순차적으로 xy 평면, yz 평면 그리고 xz 평면에서의 결과이다. 각 평면과 형상 간의 기하학적 관계는 방향성 중앙에 잠수함 선체를 배치하여 나타내었다.
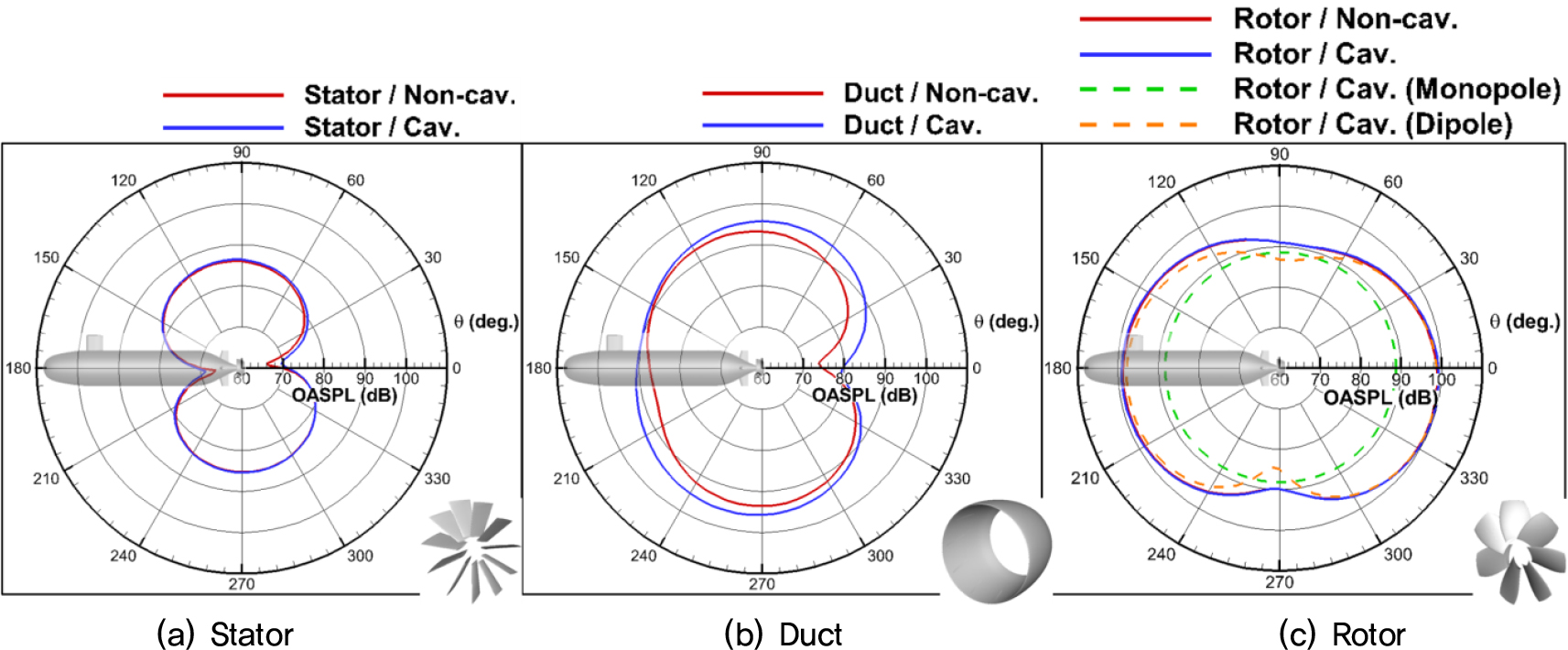
먼저, Fig.15의 xy 평면에서는 앞서 Figs. 11과 12의 유동장에서 관측된 연직 상방에서의 섭동으로 인해 스테이터와 덕트에서 연직 방향으로 소음이 크게 방사되는 것을 확인할 수 있으며, 로터는 회전에 따른 흡입면과 압력면 간의 압력 섭동으로 인해 추진 방향으로 소음이 크게 방사됨을 알 수 있다.
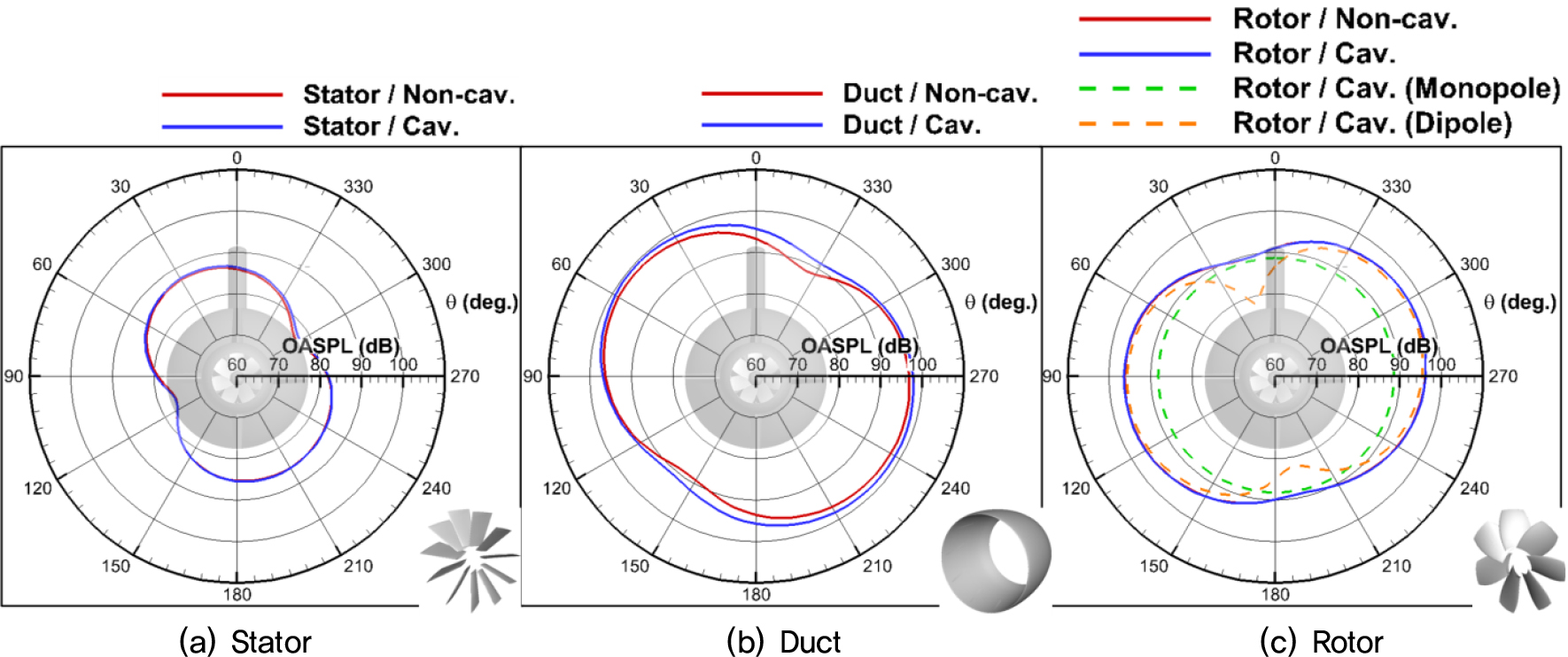
Fig. 16의 yz 평면에서는 xy 평면에서와 동일한 이유로 스테이터와 덕트에서 연직방향으로 소음이 크게 방사되지만 로터에서는 우측상방으로 소음이 더 크게 방사되고 있으며 이는 Figs. 11, 12의 유동장에서 우측 방향에서 발생하는 유동박리의 영향으로 판단된다.
마지막으로 Fig. 17의 xz 평면에서는 Figs. 11, 12에서 나타낸 3시 방향에서의 유동박리 영향으로 스테이터와 덕트에서 추진기 좌우 방향으로 소음이 강하게 방사되며, 로터는 추진 방향으로 큰 소음 분포를 보인다.
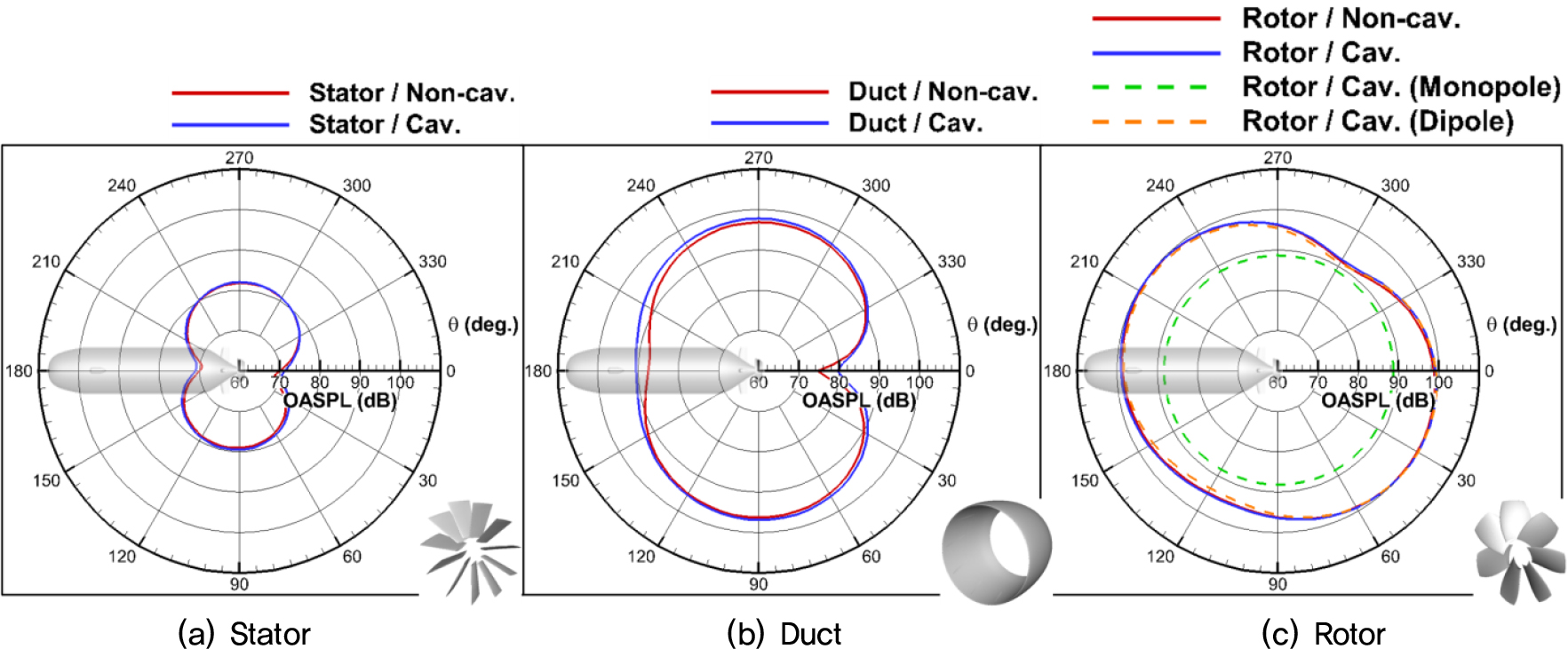
모든 방향에서 각 구성품별 소음 기여도는 덕트와 로터의 기여도가 크고, 스테이터의 기여도가 작음을 알 수 있다. 그러나 스테이터는 직접적인 소음원으로써의 영향은 미미하지만 스테이터의 배치가 로터에서 발달하는 유동 구조와 이로 인한 소음원 형성에 영향을 미치므로 반류 분포를 고려한 스테이터의 배치가 저소음 추진기 설계에 중요함을 알 수 있다.
덕트와 스테이터, 로터의 표면을 소음 적분면으로 선정할 경우, 물체 표면에서의 정보만을 활용하므로 유동장 내 체적 변화 성분에 해당하는 공동 소음원을 반영하는데는 한계가 있다. 이로 인해 Figs. 15, 16, 17에서의 소음 결과는 공동과 비공동 조건에서 유사한 수준을 보여준다. 따라서 유동장 내 소음원 영역을 충분히 감싸는 두 가지 형태의 투과성 적분면에 대한 소음 방향성을 Figs. 18과 19에 나타내었다. 사용된 소음 적분면은 각각 Fig. 4(d), (e)이다.
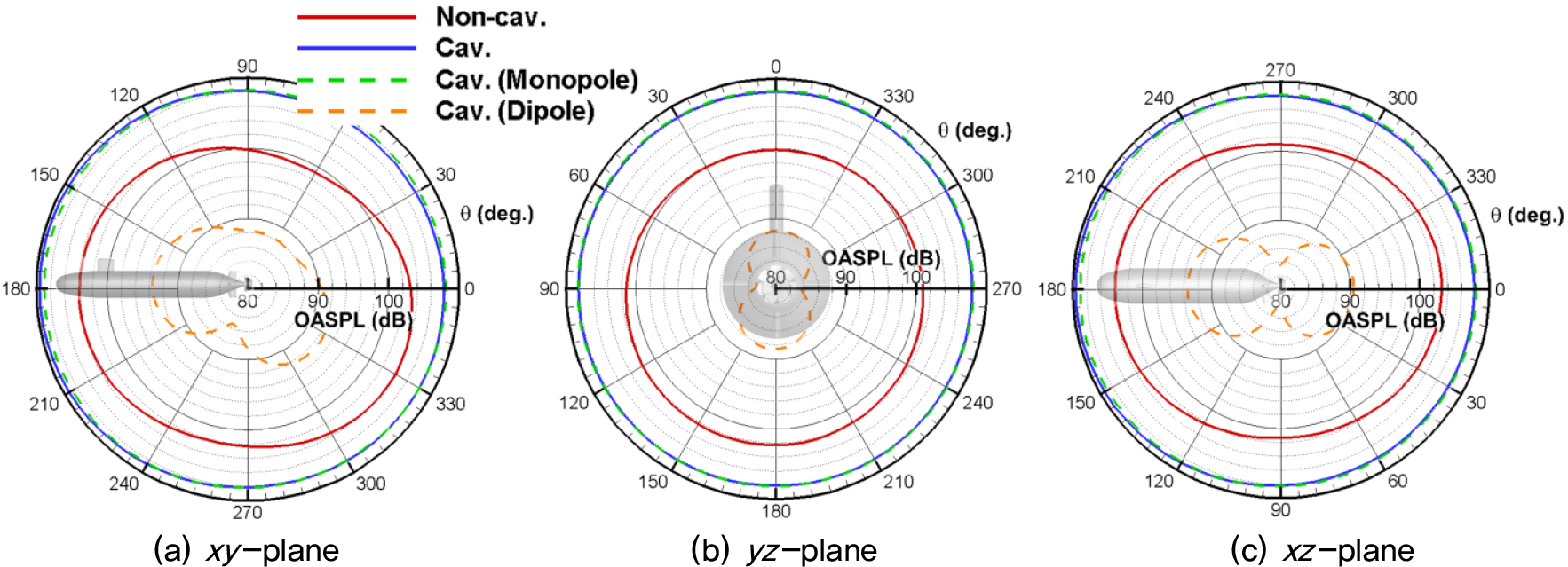
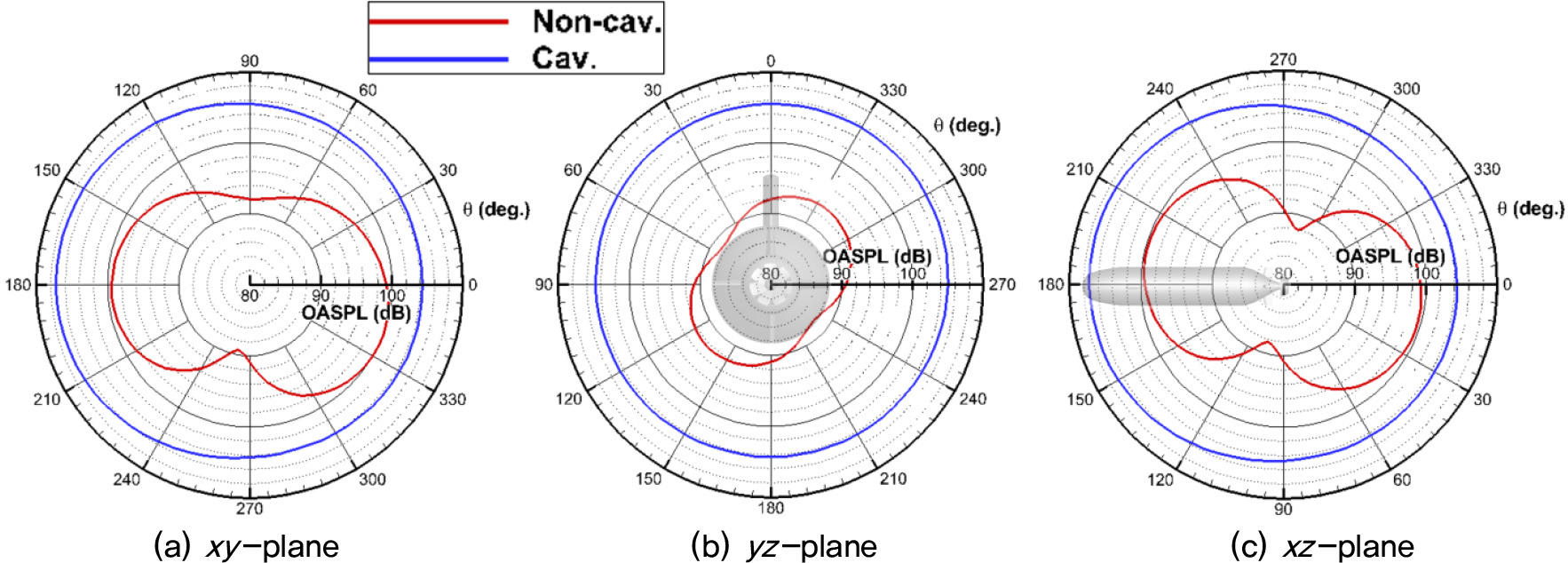
투과성 적분면을 사용한 두 경우 모두 공동 조건에서 소음이 비공동 조건에 비해 크게 예측되고 있으며, 구형의 형태로 방사되는 것을 알 수 있다. 공동은 단극 형태의 매우 강한 소음원이며 공동이 발생할 경우 비공동 소음에 비해 전 주파수 대역에서 소음이 급격하게 증가하므로, 해당 결과는 이러한 현상과 잘 부합함을 알 수 있다.
Fig. 20은 두 투과성 적분면에 대한 수음점에서의 파워 스펙트럼 밀도를 나타낸다. 두 적분면 모두 비공동 소음에 비해 공동 조건에서 높은 소음 수준을 보이며, 공동 조건의 경우 로터 회전에 의한 순음 성분인 날개 통과 주파수(Blade Passing Frequency, BPF) 성분이 두드러지게 증가한 것을 알 수 있다.
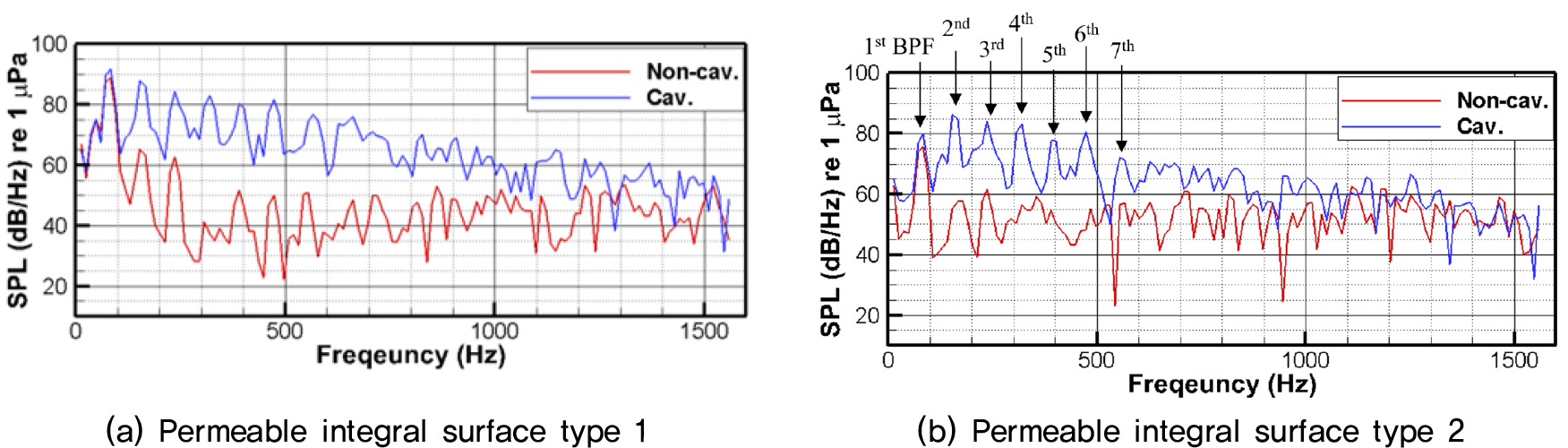
RANS 해석이 지니는 수치 감쇄로 인해 투과성 적분면이 커질수록 하류 방향을 따라 유동 구조들이 빠르게 소산되지만 적분면이 포함할 수 있는 소음원 정보 또한 많아지므로 Fig. 20(b)와 같이 비공동 소음에 의한 300 Hz 이상의 주파수 영역에서 Fig. 20(a)에 비해 증가함을 알 수 있다. 반면 공동 소음의 경우 소음원인 공동이 추진기 표면 근처에서 형성되므로 적분면 변화에 따른 소음 변화가 미미함을 알 수 있다. 또한 투과성 적분면이 추진기와 가까울수록 로터 회전에 의해 형성되는 유동 소음원들의 영향이 잘 반영되므로 Fig. 20(a)와 같이 첫번째 BPF 성분이 높게 예측된다.
이러한 적분면 위치에 따른 예측 결과의 차이는 높은 정확도의 유동해석 기법과 적분면을 내 충분한 격자 수를 통해 극복이 가능하지만, 동시에 많은 수의 Central Processing Unit(CPU)를 보유하고 있는 고성능의 병렬 PC와 오랜 해석 시간이 요구된다. 따라서 적분면 선정은 유동해석 단계에서부터 해석자원 및 시간과 같은 경제적 비용을 고려하여 많은 검토가 필요하다.
IV. 결 론
본 연구에서는 전산해석을 통해 펌프젯 추진기를 대상으로 공동과 비공동 조건에서 추진기의 각 구성품별 소음 기여도를 평가하였다. 해석에 활용된 펌프젯 추진기는 선박해양플랜트 연구소에서 연구목적으로 개발된 추진기이며, 해석 영역은 대형 캐비테이션 터널과 동일하게 선정하였다. 유동장 내 소음원을 모사하기 위해 균일혼상류 가정의 RANS 해석을 수행하였으며, 공동 유동장 모사를 위해 VOF 기법과 Schnerr-Sauer 공동 모델을 적용하였다. 유동해석은 상용코드인 ANSYS Fluent v22를 활용하였으며, 소음해석은 FW-H 방정식 기반의 내부코드를 활용하였다.
해석 결과로부터 로터의 연직상방과 우측에서 유동박리에 의한 섭동이 관측되었으며 해당 방향으로 소음이 강하게 방사됨을 확인하였다. 특히 박리된 유동구조는 로터 앞에 위치한 스테이터의 배치에 영향을 받아 형성되었으며, 덕트와 로터에 의한 쌍극 소음을 유발하는 것을 확인하였다. 또한, 스테이터 자체는 직접적인 소음원으로서의 역할은 미미하였으나 유동 소음원을 형성하는데 기여함을 확인하였다. 로터에 의한 방사소음은 주로 로터 회전에 따른 흡입면과 압력면에서의 압력섭동으로 인해 추진방향으로도 강하게 방사되었다.
비투과성 적분면의 경우 체적 소음원에 해당하는 공동 소음원의 영향을 제대로 반영하지 못하는 한계를 보였으며, 이에 투과성 적분면을 통해 공동 소음원의 기여도를 확인하였다. 공동이 발생할 경우 모든 방향에 대해 단극 소음원의 형태로 소음이 방사되었으며 비공동 소음원에 비해 전 주파수 대역에서 높은 소음이 방사됨을 확인하였다. 또한 적분면이 추진기에 가까울수록 순음 소음인 BPF 소음을 높게 예측하였으며, 반면 적분면이 커질수록 적분면 내 더 많은 소음원을 고려할 수 있으므로 광대역 소음이 증가하는 경향을 보였다. 적절한 적분면의 선정을 위해 유동해석 단계에서부터 많은 검토가 요구되지만 이러한 주제는 본 논문의 영역을 벗어나므로 차후의 연구 주제로 다룰 예정이다.
