

I. 서 론
수중에서 원거리까지 전달 가능한 음파는 표적(target)의 탐지(detection) 및 식별(classification)하기 위한 효과적인 수단으로 각종 소나에 활용되고 있다.[1,2] 특히 수동 소나(passive sonar)의 경우 표적에서 발생되는 방사 소음(radiated noise)이 표적을 탐지, 추적 및 식별을 위한 유일한 수단으로 이용된다.
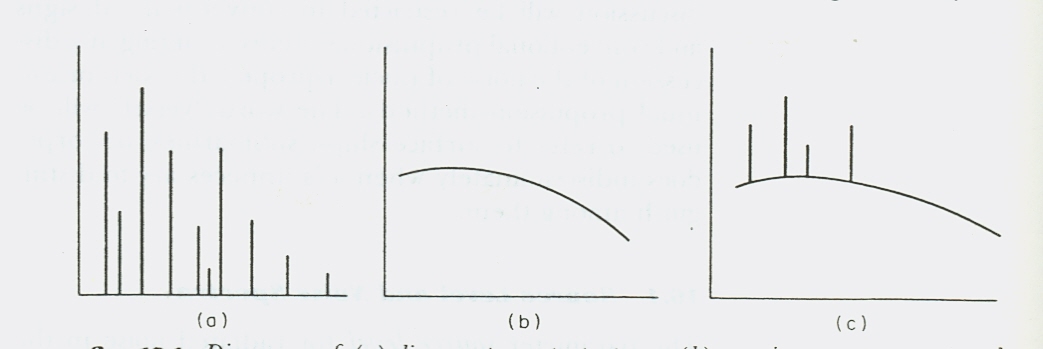
표적의 방사소음은 표적에서 발생되는 모든 소음을 총칭하며 크게 기계류에 의한 소음(machinery noise), 유체역학에 의한 소음(hydrodynamic noise), 프로펠러에 의한 소음으로 분류된다.[3] 첫째, 기계류 소음은 표적 내부의 개별 기계류가 작동함에 따라 발생하는 개별 기계류(추진 엔진, 기어박스, 보조장치 등)의 진동이 표적 선체를 통하여 전달되는 소음으로 협대역 신호(narrowband signal), 즉 토널 신호 형태를 가지며 표적의 탐지 및 식별에 가장 기초적인 자료로 활용된다. 둘째, 유체소음은 표적이 기동함으로써 표적의 선체와 물의 마찰에 의해 발생되는 소음으로 표적 선체의 설계 구조에 따라 달라지며 표적의 속도와 수심에 큰 영향을 받는다. 마지막으로 프로펠러 소음은 유체역학 소음의 한 형태로 수중에서 프로펠러 회전에 의해 생성된다. 프로펠러의 회전은 날개의 표면과 끝에 수압의 감소를 초래한다. 이는 수중에 낮은 압력 공간을 형성하여 서로 다른 크기를 가지는 다수의 공기방울을 발생시키고 프로펠러 주위에서 서로 충돌하여 터짐으로써 광대역 신호(broadband signal) 특성을 갖는 캐비테이션 소음(cavitation noise)을 발생시킨다. 이러한 광대역 캐비테이션 소음 신호는 표적의 프로펠러 축 회전 수(propeller shaft rate), 날개 회전 수(blade rate), 축 수(shaft number) 등을 해석하는데 이용된다. 따라서 그림 1[3]에 보는 바와 같이 일반적인 표적의 방사 소음은 기계류 소음, 유체소음, 프로펠러 소음이 합해진, 즉 토널 신호와 광대역 신호가 동시에 존재하는 모습을 나타낸다.
지금까지 수동 소나에 탐지된 표적의 방사 소음 신호를 식별하기 위해 많은 연구가 진행되고 있다. 표적의 식별을 위해서는 방사 소음 신호의 분석이 필수적이며, 특히 표적의 프로펠러 축 회전 수, 날개 회전 수, 축 수 등의 정보를 확인하기 위해서 데몬(DEMON: Detection of Envelope Modulation on Noise) 처리를 통한 신호 분석이 수행된다.[2] 데몬 처리는 진폭 변조(modulation)된 프로펠러의 소음 신호를 복조(demodulation)하여 변조 신호를 추출하는 것이다. Kummert는[4] 데몬 처리를 통해 추출된 주파수를 퍼지(fuzzy) 기술을 도입하여 식별하는 연구를 수행하였고, Sichun과 Desen은[5] 3/2-D 스펙트럼을 이용하여 데몬 처리 기법의 성능을 향상 시키는 방법을 제안하였다. 그리고 Badri와 Amindavar는[6] Nivanlinna- pick 보간법(interploation)을 이용하여 다중 경로(multipath) 환경에서 프로펠러의 회전 수, 날개 수 등을 분석하는 기법을 제안하였다. 그러나 이러한 연구들은 표적의 프로펠러 캐비테이션 소음 신호만을 고려하여 데몬 처리 수행하는 것이다. 즉, 표적의 방사 소음 신호 중 프로펠러 캐비테이션 소음 신호만 분리 가능하다고 가정하였다. 그러나 앞 단락에서 설명한 바와 같이 수동 소나에 수신되는 표적 방사 소음 신호는 프로펠러 캐비테이션 소음 신호 뿐 아니라 기계류에 의한 토널 신호 및 유체역학에 의한 소음 신호가 포함되어 있다. 따라서 데몬 처리를 위해서는 기계류에 의한 소음, 유체역학에 의한 소음 및 프로펠러 캐비테이션 소음 신호가 합해진 표적 방사 소음 신호를 고려하여야 한다. 그리고 실제 수동 소나에서 데몬 분석을 수행할 때는 토널 신호의 간섭 때문에 잘못된 데몬 처리 결과가 나오는 문제를 피하기 위하여 토널 신호 간섭이 적고 캐비테이션 소음 신호가 관측되는 광대역 신호 대역을 선택하여 데몬 처리를 수행하려고 노력한다. 그러나 이것은 수동 소나의 특성(수동 소나의 음향 신호 수신 주파수 대역의 제한 등)과 표적의 토널 신호 특성(토널 주파수 분포 등) 때문에 많은 제약사항이 존재한다.
본 논문에서는 표적의 방사 소음 신호에서 토널 신호의 간섭을 제거하기 할 수 있는 데몬 처리 기법을 제안한다. 제안된 기법은 수신된 표적의 방사 소음 신호에서 토널 신호를 추출하여 진폭 변조된 광대역 캐비테이션 소음 신호에서 토널 신호를 제거한 후 데몬 처리를 수행한다. 이를 통해 표적 방사 소음 신호에 토널 신호 간섭이 존재할 경우에도 변조 주파수만을 추출할 수 있는 토널 신호 간섭에 강인한 데몬 처리 기법을 제안하였다.
II. 문제 정의
수동 소나는 데몬 처리를 통하여 탐지된 표적의 프로펠러 날개 수, 프로펠러 축 회전수 등을 분석한다. 이러한 프로펠러 정보는 표적 식별에 매우 중요한 자료가 된다.
표적의 방사 소음 신호 ![]() 는 유체역학에 의해 발생하는 광대역 소음 신호와 기계류에 의해 발생하는 토널 신호 및 진폭 변조된 광대역 캐비테이션 소음 신호의 합으로 식(1)과 같이 표현된다.[7]
는 유체역학에 의해 발생하는 광대역 소음 신호와 기계류에 의해 발생하는 토널 신호 및 진폭 변조된 광대역 캐비테이션 소음 신호의 합으로 식(1)과 같이 표현된다.[7]
| (1) |
여기서, ![]() 는 유체역학에 의해 발생하는 광대역 소음 신호이며
는 유체역학에 의해 발생하는 광대역 소음 신호이며 ![]() 는 기계류에서 발생하는 토널 신호로 식(2)와 같고,
는 기계류에서 발생하는 토널 신호로 식(2)와 같고, ![]() 는 캐비테이션 소음 신호로 식(3)과 같이 프로펠러의 회전으로 발생하는 다수의 하모닉 변조 신호와 캐비테이션 소음 신호와의 곱으로 표현된다.[4]
는 캐비테이션 소음 신호로 식(3)과 같이 프로펠러의 회전으로 발생하는 다수의 하모닉 변조 신호와 캐비테이션 소음 신호와의 곱으로 표현된다.[4]
| (2) |
여기서, ![]() 는 토널 신호의 수,
는 토널 신호의 수, ![]() 는 토널 신호의 세기,
는 토널 신호의 세기, ![]() 는 토널 신호 주파수,
는 토널 신호 주파수, ![]() 는 초기 위상(phase) 이다.
는 초기 위상(phase) 이다.
| (3) |
여기서, ![]() 는 하모닉 차수의 길이,
는 하모닉 차수의 길이, ![]() 는 변조 지수,
는 변조 지수, ![]() 는 기본 주파수,
는 기본 주파수, ![]() 는 초기 위상(phase),
는 초기 위상(phase), ![]() 는 광대역 캐비테이션 소음 신호이다. 일반적으로
는 광대역 캐비테이션 소음 신호이다. 일반적으로 ![]() 는 0.1∼0.5의 값을 가진다.[8]
는 0.1∼0.5의 값을 가진다.[8]
III. 기존 연구 및 문제점
그림 2는 기존의 데몬 처리 기법을 나타낸 것이다.[9]수동 소나에 수신된 표적 방사 소음 신호 ![]() 는 수동 소나의 특성에 따라 수신 대역이 제한된 음향 신호로 식(4)와 같이 표현된다.
는 수동 소나의 특성에 따라 수신 대역이 제한된 음향 신호로 식(4)와 같이 표현된다.
| (4) |
여기서, ![]() 와
와 ![]() 는 수동 소나의 특성에 의하여 수신 대역이 제한된 광대역 소음 신호와 캐비테이션 소음 신호이다.
는 수동 소나의 특성에 의하여 수신 대역이 제한된 광대역 소음 신호와 캐비테이션 소음 신호이다.
수동 소나로 입력된 표적의 방사 소음 신호 ![]() 는 그림 2에서 보는 바와 같이 대역 통과 필터(bandpass filter)를 적용하여 캐비테이션 신호가 존재하는 주파수 대역을 선택하고, 선택된 주파수 대역에서 포락선 검출을 위해 음향 신호의 제곱을 수행한다. 일반적으로 변조 신호의 주파수는 약 200 Hz 이하의 값을 가지므로 저주파 대역 통과 필터와 DC 제거를 이용하여 고주파 신호 및 DC 신호를 제거한다. 최종적으로 시간 영역 신호를 주파수 영역으로 변환하기 위해 FFT를 수행하고 신호에서 배경 소음을 제거하기 위해 소음 규준화(noise normalization)를 수행한다.
는 그림 2에서 보는 바와 같이 대역 통과 필터(bandpass filter)를 적용하여 캐비테이션 신호가 존재하는 주파수 대역을 선택하고, 선택된 주파수 대역에서 포락선 검출을 위해 음향 신호의 제곱을 수행한다. 일반적으로 변조 신호의 주파수는 약 200 Hz 이하의 값을 가지므로 저주파 대역 통과 필터와 DC 제거를 이용하여 고주파 신호 및 DC 신호를 제거한다. 최종적으로 시간 영역 신호를 주파수 영역으로 변환하기 위해 FFT를 수행하고 신호에서 배경 소음을 제거하기 위해 소음 규준화(noise normalization)를 수행한다.
대부분의 수동 소나는 표적의 토널 신호가 우세하게 존재하는 수 십 Hz~수 백 Hz(또는 수 kHz) 대역의 음향신호를 수신하여 표적을 원거리 탐지 및 식별이 용이하도록 설계된다.[3] 따라서 그림 2의 기존 DEMON처리 기법과 같이 토널 신호가 존재하지 않고 캐비테이션 신호만 존재하는 대역 통과 필터를 적용하기가 매우 어려울 뿐만 아니라, 많은 경우 대역 통과 필터를 통과한 표적의 광대역 소음 신호에 토널 신호가 포함되어 있으며, 이 경우 토널 신호의 간섭으로 인하여 데몬 분석이 잘못될 수 있다.
이러한 문제를 자세히 살펴보면 그림 2에서 나타낸 바와 같이 수동 소나에 수신된 표적의 방사 소음 신호 ![]() 에 대해 대역 통과 필터를 적용한 신호를
에 대해 대역 통과 필터를 적용한 신호를 ![]() 라고 하면,
라고 하면, ![]() 의 제곱은 식(1)∼식(3)로부터 식(5)와 같이 쓸 수 있다.
의 제곱은 식(1)∼식(3)로부터 식(5)와 같이 쓸 수 있다.
여기서, 식을 간략히 하기 위해 광대역 소음 신호 및 초기 위상 ![]() 와
와 ![]() 는 생략하였다. 그리고
는 생략하였다. 그리고 ![]() ,
, ![]() 와
와 ![]() 는 대역 통과 필터가 적용된 토널 신호 주파수와 캐비테이션 소음 신호이고,
는 대역 통과 필터가 적용된 토널 신호 주파수와 캐비테이션 소음 신호이고, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() 는 각 주파수 신호의 크기,
는 각 주파수 신호의 크기, ![]() 는 DC 신호이다.
는 DC 신호이다.
|
그림 2.기존 DEMON 처리 기법의 블록 다이어그램 Fig. 2.Block diagram of the conventional DEMON processing algorithm. |
| (5) |

따라서 토널 신호 주파수 ![]()
![]() 와 변조 신호 주파수
와 변조 신호 주파수 ![]()
![]() 와의 관계가
와의 관계가 ![]() 라고 가정하면, 통과 주파수 값이
라고 가정하면, 통과 주파수 값이 ![]() 인 저주파 대역 통과 필터 적용 및 DC 신호를 제거한 표적의 방사 소음 신호
인 저주파 대역 통과 필터 적용 및 DC 신호를 제거한 표적의 방사 소음 신호 ![]() 는 식(6)과 같다.
는 식(6)과 같다.
| (6) |
여기서, ![]() 는 제곱 수행 후 저주파 통과 필터 적용과 DC 제거가 된 광대역 캐비테이션 소음 신호이고,
는 제곱 수행 후 저주파 통과 필터 적용과 DC 제거가 된 광대역 캐비테이션 소음 신호이고, ![]() 는 식(7)과 같이 정의한다.
는 식(7)과 같이 정의한다.
| (7) |
그러므로 특정 토널 주파수가 근접(![]() ,
, ![]() )하여 존재하면 식(6)에서 보는 바와 같이 토널 신호의 차 주파수가 저주파 대역 필터를 통과한다. 따라서
)하여 존재하면 식(6)에서 보는 바와 같이 토널 신호의 차 주파수가 저주파 대역 필터를 통과한다. 따라서 ![]() 를 그림 2에서 나타낸 FFT를 통해 주파수 영역 신호로 변환 후 소음 규준화를 수행하면 데몬 처리를 통해 추출하려고 한 하모닉 주파수 신호
를 그림 2에서 나타낸 FFT를 통해 주파수 영역 신호로 변환 후 소음 규준화를 수행하면 데몬 처리를 통해 추출하려고 한 하모닉 주파수 신호 ![]() 이외에 토널 신호의 차 주파수
이외에 토널 신호의 차 주파수 ![]() 를 추가적으로 검출하게 된다. 즉 기존의 데몬 처리는 프로펠러 신호 뿐 아니라 토널 신호의 차 주파수 성분을 추가로 검출하므로 데몬 분석이 용이하지 않게 된다.
를 추가적으로 검출하게 된다. 즉 기존의 데몬 처리는 프로펠러 신호 뿐 아니라 토널 신호의 차 주파수 성분을 추가로 검출하므로 데몬 분석이 용이하지 않게 된다.
IV. 제안 기법
3장에서 살펴본 바와 같이 식(4)에 나타낸 수동 소나에 수신된 표적의 방사 소음 신호에 토널 신호 주파수가 근접하여 존재하는 경우에도 데몬 처리를 수행할 때 잘못된 분석 결과를 도출하지 않기 위해서 본 논문에서는 토널 신호 간섭을 제거한 데몬 처리 기법을 제안한다. 식(3)에서 보는 바와 같이 변조된 프로펠러의 소음 신호는 날개의 회전으로 발생하는 하모닉 신호(변조 신호)를 광대역 캐비테이션 소음 신호가 캐리어(carrier)의 역할을 수행하여 발생한다. 이는 무수히 많은 캐리어가 존재 하므로 그 중 일부 캐리어 성분이 소실되어도 변조 신호를 복조할 수 있음을 의미한다. 다시 말해 광대역 캐비테이션 소음 신호에서 일부 주파수 신호 성분이 소실되어도 날개의 회전으로 발생하는 하모닉 신호를 복조할 수 있다. 따라서 본 논문에서는 이러한 성질을 이용하여 토널 신호 간섭에 강인한 데몬 처리 기법을 제안하였다.
제안된 데몬 처리 기법을 그림 3에 나타내었다. 우선 토널 신호의 간섭을 제거하기 위하여 데몬 처리 수행 전에 토널 신호를 추출 및 제거한다. 다시 말해 식(4)에서 나타낸 주파수가 ![]() 인 토널 신호를 제거한다. 그림 3에서 살펴보면, 첫 번째 “Bandpass Filter” 블록에서 수신된 음향 신호
인 토널 신호를 제거한다. 그림 3에서 살펴보면, 첫 번째 “Bandpass Filter” 블록에서 수신된 음향 신호 ![]() 를 대역 통과 필터를 적용하여
를 대역 통과 필터를 적용하여 ![]() 를 생성한다. 두 번째 “FFT” 블록에서
를 생성한다. 두 번째 “FFT” 블록에서 ![]() 에 대해 FFT를 수행하여 시간 영역 신호를 주파수 영역 신호
에 대해 FFT를 수행하여 시간 영역 신호를 주파수 영역 신호 ![]() 로 변환하고, 세 번째 “Noise Normalization” 블록에서 소음 규준화를 수행하여 배경 소음을 제거한다. 네 번째 “Tonal Detection” 블록에서 DT(detection threshold)를 설정하여 DT 이상인 토널 신호
로 변환하고, 세 번째 “Noise Normalization” 블록에서 소음 규준화를 수행하여 배경 소음을 제거한다. 네 번째 “Tonal Detection” 블록에서 DT(detection threshold)를 설정하여 DT 이상인 토널 신호 ![]()
![]() 를 추출한다. 여기서, DT는 수동 소나에 수신된 음향 신호의 소음 특성에 따라 조정된다. 그 후
를 추출한다. 여기서, DT는 수동 소나에 수신된 음향 신호의 소음 특성에 따라 조정된다. 그 후 ![]() 에 대해 “Bandstop Filter” 블록에서 추출된 토널 신호
에 대해 “Bandstop Filter” 블록에서 추출된 토널 신호 ![]()
![]() 성분을 제거한다. 처리된 표적의 방사 소음 신호
성분을 제거한다. 처리된 표적의 방사 소음 신호 ![]() 는 식(8)과 같이 표현된다.
는 식(8)과 같이 표현된다.
|
그림 3.제안된 DEMON 처리 기법의 블록 다이어그램 Fig. 3.Block diagram of the proposed DEMON processing algorithm. |

| (8) |
여기서, ![]() 와
와 ![]() 는 “Bandstop Filter” 블록을 통과한 광대역 소음 신호와 캐비테이션 소음 신호이다.
는 “Bandstop Filter” 블록을 통과한 광대역 소음 신호와 캐비테이션 소음 신호이다.
다음으로 토널 신호가 제거된 표적의 방사 소음 신호 ![]() 를 그림 3에서 나타낸 바와 같이 제곱 처리 한다. 제곱 처리된 신호를 저주파 통과 필터 적용과 DC 신호 제거를 수행하면 식(9)의
를 그림 3에서 나타낸 바와 같이 제곱 처리 한다. 제곱 처리된 신호를 저주파 통과 필터 적용과 DC 신호 제거를 수행하면 식(9)의 ![]() 와 같이 나타낼 수 있다.
와 같이 나타낼 수 있다.
| (9) |
여기서, ![]() 및
및 ![]() 는 제곱 수행 후 저주파 통과 필터 적용과 DC 제거가 된 광대역 소음 신호와 캐비테이션 소음 신호이며,
는 제곱 수행 후 저주파 통과 필터 적용과 DC 제거가 된 광대역 소음 신호와 캐비테이션 소음 신호이며, ![]() ,
, ![]() 는 각 주파수 신호의 크기이다. 식(6)과 비교하면 기존 데몬 처리 기법에서 존재하는 토널 신호의 차 주파수 성분이 제거되었음을 알 수 있다.
는 각 주파수 신호의 크기이다. 식(6)과 비교하면 기존 데몬 처리 기법에서 존재하는 토널 신호의 차 주파수 성분이 제거되었음을 알 수 있다.
제안된 데몬 처리 기법은 그림 3에 나타낸 바와 같이 계속해서 표적의 방사 소음 신호 ![]() 에 대해 FFT를 수행하여 신호를 주파수 영역으로 변환한다. 그 후 소음 규준화를 통하여 배경 소음을 제거하여 데몬 처리를 수행한다. 이를 통해 식(9)에서 보는 바와 같이 데몬 처리를 통해 확인하고자한 하모닉 변조 신호
에 대해 FFT를 수행하여 신호를 주파수 영역으로 변환한다. 그 후 소음 규준화를 통하여 배경 소음을 제거하여 데몬 처리를 수행한다. 이를 통해 식(9)에서 보는 바와 같이 데몬 처리를 통해 확인하고자한 하모닉 변조 신호 ![]()
![]() 만 추출할 수 있다. 따라서 제안된 데몬 처리 기법은 수동 소나에 수신된 표적의 방사 소음 신호에서 토널 신호의 존재 유무에 관계없이 광대역 캐비테이션 신호의 SNR(signal to noise ratio)이 가장 높은 대역을 선택하여 데몬 처리를 수행할 수 있다.
만 추출할 수 있다. 따라서 제안된 데몬 처리 기법은 수동 소나에 수신된 표적의 방사 소음 신호에서 토널 신호의 존재 유무에 관계없이 광대역 캐비테이션 신호의 SNR(signal to noise ratio)이 가장 높은 대역을 선택하여 데몬 처리를 수행할 수 있다.
V. 시뮬레이션 및 고찰
제안된 데몬 처리 기법의 성능을 확인하기 위해 MATLAB을 이용하여 시뮬레이션을 수행하였다. 시뮬레이션에 사용된 음향 신호의 샘플링 수는 8,192이고, 64차 FIR 1000 Hz∼3,000 Hz 대역 통과 필터와 64차 FIR 200 Hz 저주파 통과 필터를 사용하였다. 주파수 해상도를 향상시키기 위해 8:1 음향 신호 선택 및 제로 패딩(zero padding)을 수행 하였고 FFT 크기는 8,192이다. 그리고 소음 규준화를 위해 two-pass split-window 알고리즘[10]을 적용하였다. 제안된 데몬 처리 기법중 “Bandstop Filter” 블록에서 토널 제거를 위해 2차 IIR 노치 필터를 사용하였다.
제안된 데몬 처리 기법의 검증을 위해 두 가지 시뮬레이션 시나리오를 설정하였다. 시뮬레이션 시나리오 #1은 변조 신호의 기본 주파수 ![]() 가 21.125 Hz이고 2차 변조 신호까지 존재하며 변조 지수는 0.5로 설정하였다. 그리고 토널 신호
가 21.125 Hz이고 2차 변조 신호까지 존재하며 변조 지수는 0.5로 설정하였다. 그리고 토널 신호 ![]() 은 2,116 Hz,
은 2,116 Hz, ![]() 는 2,211 Hz 및
는 2,211 Hz 및 ![]() 는 2,270 Hz로 설정하였다. 시뮬레이션 시나리오 #2는 변조 신호 없이 토널 신호
는 2,270 Hz로 설정하였다. 시뮬레이션 시나리오 #2는 변조 신호 없이 토널 신호 ![]() 은 2,116 Hz,
은 2,116 Hz, ![]() 는 2,158 Hz 및
는 2,158 Hz 및 ![]() 는 2,236 Hz가 되도록 설정하였다.
는 2,236 Hz가 되도록 설정하였다.
그림 4는 시뮬레이션 시나리오 #1에 대한 데몬 처리 결과이다. 그림 4(a)는 기존 데몬 처리 기법에 의한 데몬 처리 결과로 하모닉 주파수 ![]()
![]() 외에
외에 ![]() ,
, ![]() ,
, ![]() 의 신호가 검출된다.
의 신호가 검출된다. ![]() ,
, ![]() 은 시나리오에서 생성한 변조 신호이고,
은 시나리오에서 생성한 변조 신호이고, ![]() 와
와 ![]() 는 신호의 복조를 위해 수행한 제곱 처리 때문에 발생한 신호이다. 따라서 기존 데몬 처리 기법 적용시 검출된 7개의 주파수 성분으로부터 프로펠러 정보를 분석하는 것은 용이치 않다. 그림 4(b)는 제안된 데몬 처리 기법에 의한 결과로 시뮬레이션 시나리오에서 설정한 변조 신호
는 신호의 복조를 위해 수행한 제곱 처리 때문에 발생한 신호이다. 따라서 기존 데몬 처리 기법 적용시 검출된 7개의 주파수 성분으로부터 프로펠러 정보를 분석하는 것은 용이치 않다. 그림 4(b)는 제안된 데몬 처리 기법에 의한 결과로 시뮬레이션 시나리오에서 설정한 변조 신호 ![]() 와
와 ![]() 및 제곱 처리의 영향으로 발생하는
및 제곱 처리의 영향으로 발생하는 ![]() 와
와 ![]() 만 검출된다. 따라서 제안된 데몬 처리 기법을 이용하면 변조 신호만 정확히 분석할 수 있다.
만 검출된다. 따라서 제안된 데몬 처리 기법을 이용하면 변조 신호만 정확히 분석할 수 있다.
|
(a) |
|
(b) |
그림 4.시나리오 #1에 대한 데몬 처리 결과; (a) 기존 기법 (b) 제안 기법 Fig. 4.The DEMON processing results of the scenario #1; (a) the conventional algorithm (b) the proposed algorithm. |
그림 5는 시뮬레이션 시나리오 #2의 분석 결과이다. 그림 5(a)에서 보는 바와 같이 기존 데몬 처리 기법은 토널 신호의 차 주파수인 ![]() ,
, ![]() ,
, ![]() 의 신호, 즉 41 Hz, 79 Hz, 120 Hz 주파수가 추출된다. 이것은 하모닉 주파수와 유사한 형태를 가지므로 숙련된 데몬 분석자도 잘못된 결과를 도출할 가능성이 매우 높다. 그러나 제안된 데몬 처리 기법을 사용하면 그림 5(b)에서 나타낸 바와 같이 토널 신호의 차 주파수가 검출되지 않으므로 수신된 표적의 방사 소음 신호에서는 프로펠러의 변조 신호가 존재하지 않음을 정확히 알 수 있다.
의 신호, 즉 41 Hz, 79 Hz, 120 Hz 주파수가 추출된다. 이것은 하모닉 주파수와 유사한 형태를 가지므로 숙련된 데몬 분석자도 잘못된 결과를 도출할 가능성이 매우 높다. 그러나 제안된 데몬 처리 기법을 사용하면 그림 5(b)에서 나타낸 바와 같이 토널 신호의 차 주파수가 검출되지 않으므로 수신된 표적의 방사 소음 신호에서는 프로펠러의 변조 신호가 존재하지 않음을 정확히 알 수 있다.
|
(a) |
|
(b) |
그림 5.시나리오 #2에 대한 데몬 처리 결과; (a) 기존 기법 (b) 제안 기법 Fig. 5.The DEMON processing results of the scenario #2; (a) the conventional algorithm (b) the proposed algorithm. |
VI. 결 론
본 논문에서는 토널 신호 간섭을 제거한 데몬 처리 기법을 제안하였다. 기존 데몬 처리 기법을 이용할 경우 표적의 방사 소음 신호에 토널 신호 주파수가 근접하여 존재하면 토널 신호의 차 주파수의 영향이 데몬 처리 결과에 반영되어 결과 확인에 혼란을 야기할 수 있다. 그러나 제안된 데몬 처리 기법을 적용하면 토널 신호의 차 주파수에 의한 혼란을 배제할 수 있다.
제안된 데몬 처리 기법은 표적의 방사 소음을 이용하여 표적을 탐지 및 식별하는 수동 소나에 적용되어 토널 신호 주파수가 근접하여 존재하는 경우에도 정확한 데몬 처리가 가능하게 할 수 있다. 따라서 본 논문에서 제안된 토널 신호 간섭에 강인한 데몬 처리 기법은 표적의 프로펠러 축 회전 수, 날개 회전 수, 축 수 등의 정확한 해석에 도움이 될 것으로 기대된다.
