

I. 서 론
II. 음향벡터센서 배열신호 모델
III. Focusing 행렬을 이용한 광대역 적응빔형성기법
IV. 제안한 부배열을 이용한 광대역 적응빔형성 기법
V. 모의 실험
VI. 결 론
I. 서 론
센서 배열을 이용한 음원의 DOA(Direction Of Arrival) 추정문제는 소나, 레이더, 통신 등의 신호처리 분야에서 주요 연구 분야이다.[1-3] 기존에는 주로 음압 센서를 이용한 배열 신호처리가 많이 연구 되어 왔다. 최근에 활발히 연구가 진행되는 음향 벡터 센서 배열(Acoustic Vector Sensor Array, AVSA)에서는 음향장에서 음원의 압력 및 벡터정보가 관측되므로 좌우 구분 등의 DOA추정에 있어서 기존의 음압센서배열에 비해 많은 이점을 가진다.[3-5] Nehorai와 Paldi[4]는 음향벡터센서 배열의 관측모델을 제시하였다. 그 후 음향 벡터 센서 배열을 이용하여 Hawkes와 Nehorai[5]는 기존 빔형성과 적응빔형성을 적용하여 성능을 비교하여 제시하였다. 그리고 Wong과 Zoltowski[6-8]는 음향 벡터 센서 배열에 ESPRIT과 Root-MUSIC를 적용하여 그 성능을 분석하였다. 그러나 이들은 모두 협대역 신호를 가정한 음향 벡터 센서 배열 기반의 DOA 추정기법이다.
최근 Chen 과 Zhao[9]는 음향 벡터 센서 배열에서 광대역 방위각 추정을 위해 코히어런트 신호부공간(Coherent Signal Subspace, CSS) 전처리를 이용한 음향벡터센서배열 기반의 MVDR기법(AV-WMVDR, Acoustic Vector sensor array based Wideband Minimum Variance Distortionless Response)을 제안하였다. 이 기법을 적용하기 위하여 초점조정 행렬[10,11]을 추정하는 과정이 필요 하며 초점조정 행렬추정 방법에는 초점조정 방위 추정을 통한 방식과 사전 방위 추정이 필요 없는 공간적 재표본화 초점조정(Spatially Resampled Focusing, SRF) 기법이 알려져 있다. 그러나 이와 같은 초점조정 행렬을 통한 기법은 방위각 추정시 바이어스가 발생하는 것으로 알려져 있다.[12]
한편, 안정적인 공분산 행렬 추정을 위하여 주파수 영역 데이터 단편의 수는 공분산행렬의 차원(센서의 개수)보다 최소 2배 이상은 커야 한다. 음향벡터센서배열은 기존 음압센서배열과 달리 벡터 센서 구조 특성상 공분산행렬의 차원이 3 ~ 4배 커진다. 역행렬 계산등을 위한 안정적인 공분산행렬 추정을 위하여 데이터 단편의 수가 크게 증가하게 된다.
본 논문에서는 이러한 방위각 오차와 데이터 단편수의 문제를 완화 하기 위하여 Krolik과 Swingler[12,13]가 음압센서에 적용한 STMV(Steered Minimum Variance) 기법을 음향벡터센서 배열에 확장하여 적용하고 부배열 기법을 통하여 공분산 행렬의 차원을 줄였다. 이를 통하여 안정적인 공분산 행렬 추정에 필요한 데이터의 단편수를 줄임으로써 방위각 추정오차를 줄였다. 부배열기법을 적용하는 과정에서 지연합 빔형성이 수행됨으로써 부배열에 사용된 센서 수 만큼 차원이 감소된 지향성 센서 출력을 얻는다. 이를 통하여 차원이 감소된 부분 적응 빔형성을 수행하게 된다.
본 논문은 I장 서론에 이어, II장에서 음향벡터 센서신호 모델을 소개하고, III장에서 초점조정 행렬을 이용한 광대역 적응빔형성기법, IV장에서 제안한 부배열을 이용한 광대역 적응빔형성기법을 소개한다. V장에서는 모의실험을 통하여 제안한 기법의 성능을 분석하고, 끝으로 VI장에서는 결론을 맺는다.
II. 음향벡터센서 배열신호 모델
대역폭  를 갖는
를 갖는  개의 광대역 음원을 고려한다.
개의 광대역 음원을 고려한다.
 번째 음원의 방위각은 Fig. 1과 같이
번째 음원의 방위각은 Fig. 1과 같이  로 표현한다. 극각(polar angle)
로 표현한다. 극각(polar angle)  는
는  축에 대해 시계방향으로
축에 대해 시계방향으로  범위내의 값이며, 방위각(azimuthal angle)
범위내의 값이며, 방위각(azimuthal angle)  는
는  축을 기준으로 반시계 방향으로
축을 기준으로 반시계 방향으로  의 값이다.
의 값이다.
2차원( ) 음향벡터 센서는 압력 센서와 공간상에 동일한 위치에 존재하는 한쌍의 직교 벡터센서(
) 음향벡터 센서는 압력 센서와 공간상에 동일한 위치에 존재하는 한쌍의 직교 벡터센서( ,
,  축)로 구성되어있으며 다음과 같이 표현된다.
축)로 구성되어있으며 다음과 같이 표현된다.

 . (1)
. (1)
3차원( ) 음향벡터 센서는 압력 센서와 공간상에 동일한 위치에 존재하는 3개가 직교인 벡터센서(
) 음향벡터 센서는 압력 센서와 공간상에 동일한 위치에 존재하는 3개가 직교인 벡터센서( ,
,  ,
,  축)로 구성되어있으며 다음과 같이 표현된다.
축)로 구성되어있으며 다음과 같이 표현된다.
 . (2)
. (2)
본 논문에서는 2차원( ) 음향벡터 센서를 고려하여 분석한다.
) 음향벡터 센서를 고려하여 분석한다.
잡음은 영평균 시불변 확률과정을 가정하고 신호와 확률적 독립특성을 갖는다. 수신된  배열의
배열의  번째 주파수 빈
번째 주파수 빈  의 신호에 대한 푸리에 벡터는 다음 식과 같다.
의 신호에 대한 푸리에 벡터는 다음 식과 같다.
 , (3)
, (3)
여기서  는
는  표적에 대한 배열 행렬이고
표적에 대한 배열 행렬이고  은 압력센서 개수이다. 그리고
은 압력센서 개수이다. 그리고 

 는
는  번째 표적에 대한 조향벡터이며
번째 표적에 대한 조향벡터이며  는 크로네커곱을 나타낸다. 또한
는 크로네커곱을 나타낸다. 또한  는
는  번째 표적에 대한 압력 센서의 조향 벡터이며
번째 표적에 대한 압력 센서의 조향 벡터이며  번째 요소값
번째 요소값  이다.
이다.  이며
이며  는
는  번째 음원의
번째 음원의  번째 주파수 성분이다.
번째 주파수 성분이다.  는
는 
 잡음 벡터이다.
잡음 벡터이다.
III. Focusing 행렬을 이용한 광대역 적응빔형성기법
기존의 음향벡터 배열 센서를 이용한 광대역 적응빔형성은 초점조정 주파수  로 변환하는 초점조정 행렬
로 변환하는 초점조정 행렬  를 이용하여 서로 다른 주파수들에 대한 신호들을
를 이용하여 서로 다른 주파수들에 대한 신호들을  신호로 변환한다. 그리고 변환된 데이터단편을 통하여 공분산행렬을 추정하고 주파수
신호로 변환한다. 그리고 변환된 데이터단편을 통하여 공분산행렬을 추정하고 주파수  에 대한 조향벡터를 이용하여 해당 방위의 광대역 빔출력 에너지를 추정한다.
에 대한 조향벡터를 이용하여 해당 방위의 광대역 빔출력 에너지를 추정한다.
음향벡터 배열센서에서 초점조정 행렬  은 주파수
은 주파수  와 초점조정 주파수
와 초점조정 주파수  사이에 다음 식을 만족한다.
사이에 다음 식을 만족한다.
 . (4)
. (4)
음향벡터 배열 센서의 초점조정 행렬  는 음압센서배열에서 초점조정 행렬
는 음압센서배열에서 초점조정 행렬  로 부터 추정하며 본 논문에서는 음원의 초기 방위 추정이 필요없는 SRF기법[9,11]을 적용한다. SRF기법의 경우 행렬
로 부터 추정하며 본 논문에서는 음원의 초기 방위 추정이 필요없는 SRF기법[9,11]을 적용한다. SRF기법의 경우 행렬  의
의  요소 값
요소 값  는 다음과 같다.
는 다음과 같다.
 . (5)
. (5)
단,  이다. 얻어진 행렬
이다. 얻어진 행렬  를 이용하여 2차원 음향 벡터 배열센서에서 주파수
를 이용하여 2차원 음향 벡터 배열센서에서 주파수  에 대한 초점조정 행렬
에 대한 초점조정 행렬  은 다음과 같다.
은 다음과 같다.
 , (6)
, (6)
그리고  주파수에 대한 신호
주파수에 대한 신호  는 초점조정 행렬
는 초점조정 행렬  에 의해
에 의해  주파수 신호
주파수 신호  로 변환된다.
로 변환된다.
 . (7)
. (7)
 에 대한 신호들을 이용하여 다음식과 같이 공분산 행렬을 추정한다.
에 대한 신호들을 이용하여 다음식과 같이 공분산 행렬을 추정한다.
 . (8)
. (8)
단,  과
과  는 각각 대역의 최소, 최대 주파수 빈 번호를 나타낸다.
는 각각 대역의 최소, 최대 주파수 빈 번호를 나타낸다.
조향각  에 대한 광대역 빔출력 에너지
에 대한 광대역 빔출력 에너지  는 주파수
는 주파수  에 대한 조향벡터
에 대한 조향벡터  와 공분산 행렬
와 공분산 행렬  를 이용하여 다음과 같이 추정된다.
를 이용하여 다음과 같이 추정된다.
 . (9)
. (9)
IV. 제안한 부배열을 이용한 광대역 적응빔형성 기법
조향공분산 행렬은 센서배열 출력을 원하는 방향 로 미리 위상지연을 주어 조향시킨 후 추정한다. 음압센서 배열에서 주파수
로 미리 위상지연을 주어 조향시킨 후 추정한다. 음압센서 배열에서 주파수  에 대한 푸리에 벡터
에 대한 푸리에 벡터 에 위상지연 벡터
에 위상지연 벡터  를 곱하여 Eq.(10)과 같이 조향된 벡터
를 곱하여 Eq.(10)과 같이 조향된 벡터  를 얻을 수 있다.[4,5]
를 얻을 수 있다.[4,5]
 , (10)
, (10)
여기서 벡터  의
의  번째 요소값
번째 요소값 
 는 각 센서별 위상 지연,
는 각 센서별 위상 지연,  는 음압 센서간격,
는 음압 센서간격,  는 음속,
는 음속,  , 그리고
, 그리고  는 하다마드 곱이다. Eq.(10)의 조향된 벡터
는 하다마드 곱이다. Eq.(10)의 조향된 벡터  를 이용하여 조향 공분산행렬 추정치를 구하면 Eq.(11)과 같다.
를 이용하여 조향 공분산행렬 추정치를 구하면 Eq.(11)과 같다.
 . (11)
. (11)
음압 센서배열에 대한 STMV 기법의 적응 가중벡터는 다음과 같다.[11]
 , (12)
, (12)
여기서  로 정의된다.
로 정의된다.
본 논문에서는 Eq.(1)의 
 에 위치한
에 위치한  개의 2차원(
개의 2차원( ) 음향 벡터 센서를 고려한다.
) 음향 벡터 센서를 고려한다.
벡터 배열센서에서  방위에 대한 조향공분산행렬을 얻기 위하여 다음 식과 같은 벡터 배열센서 위상지연 벡터
방위에 대한 조향공분산행렬을 얻기 위하여 다음 식과 같은 벡터 배열센서 위상지연 벡터  를 얻는다.
를 얻는다.
 , (13)
, (13)
여기서  이다.
이다.
벡터 배열센서 푸리에 벡터  에 대해 원하는 방위
에 대해 원하는 방위  로 조향할 수 있다. 그 결과 다음 식과 같이 조향된
로 조향할 수 있다. 그 결과 다음 식과 같이 조향된  를 얻을 수 있다.
를 얻을 수 있다.
 . (14)
. (14)
압력센서를 기준으로 부배열 구조에 따라 부배열 선택 행렬  를 정의할 수 있다.
를 정의할 수 있다.
Eq.(15)의 행렬  는 크기가
는 크기가  이고
이고  번째 부배열을
번째 부배열을  으로 정규화 하는 행렬과 각 행이 한 개의 부배열을 구성하는 압력센서를 나타내는 행렬과의 곱으로 표현된다.
으로 정규화 하는 행렬과 각 행이 한 개의 부배열을 구성하는 압력센서를 나타내는 행렬과의 곱으로 표현된다.
 . (15)
. (15)
단  는 부배열의 개수,
는 부배열의 개수,  은
은  번째(
번째(
 ) 부배열을 구성하고 있는 센서의 개수 그리고 “1”은 각 부배열에서 선택된 압력센서를 의미한다. 이를 2차원(
) 부배열을 구성하고 있는 센서의 개수 그리고 “1”은 각 부배열에서 선택된 압력센서를 의미한다. 이를 2차원( ) 벡터센서 배열의 크기가
) 벡터센서 배열의 크기가 
 인 선택 행렬
인 선택 행렬  로 확장하면 다음과 같다.
로 확장하면 다음과 같다.
 , (16)
, (16)
여기서  는
는  크기의 단위 행렬이다.
크기의 단위 행렬이다.
다음 식은 선택 행렬  를 적용하여 차원이 감소된
를 적용하여 차원이 감소된  의 조향 푸리에 벡터
의 조향 푸리에 벡터  를 나타낸다.
를 나타낸다.
 . (17)
. (17)
이를 통하여 출력 벡터의 크기가  에서
에서  로 감소되는 효과를 얻을 수 있다. 차원은 감소되지만 선택행렬
로 감소되는 효과를 얻을 수 있다. 차원은 감소되지만 선택행렬  에 의해 각 부배열은 지연합 빔형성을 하게 되므로
에 의해 각 부배열은 지연합 빔형성을 하게 되므로  개의 지향성 센서 출력을 얻게 된다. 즉,
개의 지향성 센서 출력을 얻게 된다. 즉,  의 부배열에 대하여 압력센서에는 가중치 1이 주어지고
의 부배열에 대하여 압력센서에는 가중치 1이 주어지고  축 속도벡터 센서와
축 속도벡터 센서와  축 속도벡터센서에는 각각
축 속도벡터센서에는 각각  의 가중치를 적용한 지연합 빔형성 결과를 의미한다. 제안하는 기법은 차원이 감소된 지향성 센서 출력에 대한 부분 적응 빔형성 기법이 된다.
의 가중치를 적용한 지연합 빔형성 결과를 의미한다. 제안하는 기법은 차원이 감소된 지향성 센서 출력에 대한 부분 적응 빔형성 기법이 된다.
부배열을 적용하여 차원이 감소된 조향 푸리에 벡터 
 를 활용하여 다음 식과 같이 공분산 행렬을 얻을 수 있다.
를 활용하여 다음 식과 같이 공분산 행렬을 얻을 수 있다.
 . (18)
. (18)
모든 데이터들은 미리 선조향되었기 때문에 주파수  , 방위각
, 방위각  에 대한 조향벡터
에 대한 조향벡터  는 Eq.(13)의
는 Eq.(13)의  을 통해서 선조향하면 다음식과 같이 표현된다.
을 통해서 선조향하면 다음식과 같이 표현된다.
 . (19)
. (19)
부배열 적용을 위하여 Eq.(19)를 행렬  에 곱하면 다음 식과 같다.
에 곱하면 다음 식과 같다.
 , (20)
, (20)
여기서 
 이다. Eqs.(18)과 (20)을 통하여 벡터 배열 센서의
이다. Eqs.(18)과 (20)을 통하여 벡터 배열 센서의  방위의 광대역 빔출력 에너지
방위의 광대역 빔출력 에너지  는 다음 식과 같이 추정된다.
는 다음 식과 같이 추정된다.
 . (21)
. (21)
기존의 초점조정 행렬을 이용한 광대역적응빔형성기법은 전방위 광대역 빔출력 에너지를 추정하기 위하여 Eq.(9)와 같이 한 번의 공분산행렬  추정이 필요하지만, 제안한 기법의 경우 Eq.(21)에서와 같이 광대역 빔출력 에너지를 추정하기 위하여 방위
추정이 필요하지만, 제안한 기법의 경우 Eq.(21)에서와 같이 광대역 빔출력 에너지를 추정하기 위하여 방위  별로 공분산행렬
별로 공분산행렬  를 추정하고 이에 대한 역행렬 연산이 필요하다.
를 추정하고 이에 대한 역행렬 연산이 필요하다.
V. 모의 실험
기존의 AVSA를 이용한 코히어런트 신호부공간전처리 기반 광대역 MVDR 적응빔형성기법(AV- WMVDR)과 제안한 AVSA기반 부배열을 이용한 광대역 STMV 적응빔형성 기법(AV-WSASTMV, Acoustic Vector sensor array based Wideband SubArray STMV)의 성능을 분석하기 위하여 40°와 330°에 존재하는 음원이 16개의 음향벡터 센서가 등 간격으로 배치된 선배열에 입사하는 환경을 고려하였다. 비교의 편의를 위하여  로 가정하며 극각을
로 가정하며 극각을  로 하여 방위각
로 하여 방위각  에 대한 성능을 분석한다. AV-WMVDR 기법은 초점조정 행렬 추정을 위하여 Chen과 Zhao[9] 그리고 Krolik과 Swingler[11]이 적용한 SRF기법을 적용하였다. 센서간의 간격은 200 Hz의 반파장 간격으로 하였다. 샘플링 주파수
에 대한 성능을 분석한다. AV-WMVDR 기법은 초점조정 행렬 추정을 위하여 Chen과 Zhao[9] 그리고 Krolik과 Swingler[11]이 적용한 SRF기법을 적용하였다. 센서간의 간격은 200 Hz의 반파장 간격으로 하였다. 샘플링 주파수  는 512 Hz로 하고, 1 s 동안 관측한 512 포인트의 데이터를 푸리에변환을 수행 한 후 140 ~ 200 Hz대역에 해당되는 60개의 주파수빈 데이터를 사용하였으며 초점조정 주파수
는 512 Hz로 하고, 1 s 동안 관측한 512 포인트의 데이터를 푸리에변환을 수행 한 후 140 ~ 200 Hz대역에 해당되는 60개의 주파수빈 데이터를 사용하였으며 초점조정 주파수  180 Hz로 설정하였다.
180 Hz로 설정하였다.
이와 같은 모의실험 환경에서 AV-WSASTMV와 AV-WMVDR기법을 적용하여 그 결과를 분석하였다. 특히 본 논문에서는  차원 기준으로 전체 배열의 센서 개수
차원 기준으로 전체 배열의 센서 개수  , 부배열의 수
, 부배열의 수  일 때 AV-WMVDR의 공분산행렬 크기는 48 × 48이고 제안한 AV-WSASTMV의 조향공분산행렬의 크기는 12 × 12이다. 이를 통해 제안한 기법은 조향공분산행렬 차원수보다 5배 많은 60개 주파수 빈 데이터를이용하여 안정적인 공분산 행렬을 추정할 수 있다. 모의실험에 사용된 벡터 센서 배열의 부배열 선택 행렬
일 때 AV-WMVDR의 공분산행렬 크기는 48 × 48이고 제안한 AV-WSASTMV의 조향공분산행렬의 크기는 12 × 12이다. 이를 통해 제안한 기법은 조향공분산행렬 차원수보다 5배 많은 60개 주파수 빈 데이터를이용하여 안정적인 공분산 행렬을 추정할 수 있다. 모의실험에 사용된 벡터 센서 배열의 부배열 선택 행렬  은 다음식과 같다.
은 다음식과 같다.
 , (22)
, (22)
여기서  과
과  는 각각
는 각각  크기의 1과 0으로 이루어진 행벡터이다. 제안한 AV-WSASTMV기법의 경우 170 ~ 200 Hz대역에 해당되는 30개의 주파수빈 데이터와 140 ~ 200 Hz대역에 해당되는 60개의 주파수빈 데이터를 사용하는 경우를 고려하였다.
크기의 1과 0으로 이루어진 행벡터이다. 제안한 AV-WSASTMV기법의 경우 170 ~ 200 Hz대역에 해당되는 30개의 주파수빈 데이터와 140 ~ 200 Hz대역에 해당되는 60개의 주파수빈 데이터를 사용하는 경우를 고려하였다.
Fig. 2는 신호 대 잡음비(Signal to Noise Ratio, SNR) 0 dB 조건에서 기존의 AV-WMVDR기법과 제안한 AV-WSASTMV에 대하여 부배열적용 여부 그리고 조향공분산행렬 추정에 사용된 주파수 빈의 수를 30개, 60개로 달리하여 얻은 빔 출력 결과를 보여준다. 그림의 범례에서 적용한 기법과 부배열의 적용 상태 및 사용된 주파수의 빈수를 괄호안에 나타내었다. 빔폭과 간섭신호제거측면에서 부배열을 적용한 제안한 AV-WSASTMV기법이 기존 AV-WMVDR기법에 비하여 우수한 성능을 가진다. 이는 Krolik과 Swingler[12]의 음압센서에 적용된 STMV기법 의 장점이 음향벡터 센서에서도 그대로 나타남을 알 수 있다.
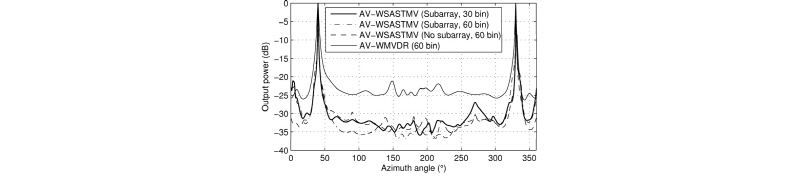
그리고 제안한 음향벡터 센서에서의 부배열을 적용한 STMV 기법은 적응 자유도는 감소하지만 단일 센서와는 달리 지향성 센서 출력을 얻는 이점을 이용하여 적응 빔형성을 수행하므로 Fig. 2에서 부배열을 사용하지 않고 60개의 주파수빈을 사용한 AV- STMV기법의 결과와 유사한 분해능을 보여준다. 따라서 한정된 데이터 단편을 사용할 경우 부배열을 사용할 경우 보다 안정적인 공분산 행렬 추정이 가능해지므로 기존의 AV-WMVDR기법이나 부배열을 사용하지 않은 STMV기법에 비하여 뛰어난 방위각 분해능을 얻을 수 있다.
Figs. 3과 4는 각각 40°와 330°음원에 대하여 제안한 AV-WSASTMV기법에 30개, 60개 주파수 빈 데이터를 이용한 경우와 기존의 AV-WMVDR기법에 60개 주파수 빈 데이터를 이용한 경우에 대하여 표적의 SNR을 -12 dB에서 6 dB까지 2 dB씩 증가시키면서 500회의 몬테카를로 시뮬레이션을 통하여 0.001° 해상도로 RMSE(Root Mean Square Error)를 분석하였다. 특히, 기존의 AV-WMVDR은 공분산 행렬의 차원이 40 × 48이므로 30개의 주파수 빈 데이터로 공분산행렬 추정이 불가능하다. Figs. 3과 4에서 AV-WSASTMV기법에 30개, 60개 주파수 빈 데이터를 이용한 경우 모두 기존의 AV-WMVDR기법(60개 주파수 빈)에 비해 방위각 추정 성능이 우수하다. 그리고 AV-WSASTMV기법의 경우 주파수 빈의 수가 많은 경우에 보다 정확한 공분산 행렬 추정으로 인해 방위각 추정 성능이 보다 우수한 결과를 보여준다.
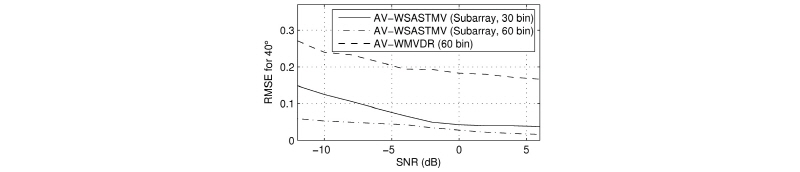
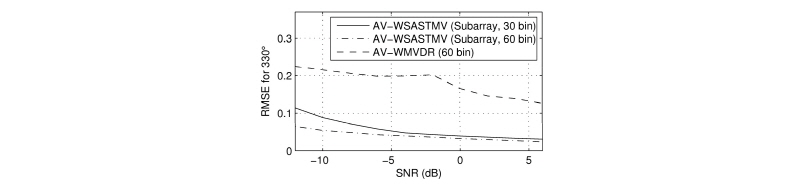
Fig. 5는 SNR이 -10 dB 조건에서 데이터 단편 주파수 빈의 수에 따른 제안한 부배열을 적용한 STMV기법과 부배열 적용을 하지 않은 STMV기법의 40°와 330°음원의 방위각 추정오차를 500회 몬테카를로 시뮬레이션을 통하여 분석한 결과이다. 부배열을 적용한 제안한 기법의 경우 조향공분산행렬의 크기는 12 × 12이고 부배열을 적용하지 않은 경우의 행렬 크기는 48 × 48이다. 따라서 부배열을 적용한 경우는 데이터 단편의 수를 12개 보다 큰 20개의 데이터 단편부터 10개씩 증가시켜 80개까지 데이터 단편을 증가시키고 부배열을 적용하지 않은 경우는 행렬의 크기 48보다 큰 50개부터 10개씩 증가시켜 80개까지 데이터 단편의 수를 달리하여 방위각 추정에 대한 오차를 분석하였다.
|
Fig. 5. Bearing estimate RMSE in 40° and 330° for number of data snapshot (samples) included in covariance matrix. |
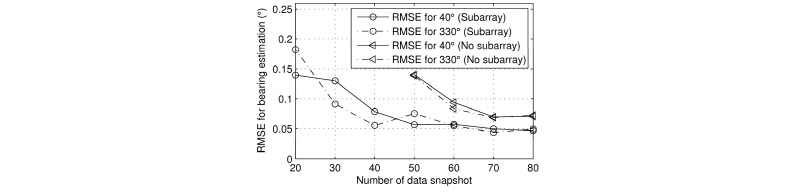
그 결과 두 경우 모두 공분산행렬 추정에 사용된 데이터 단편의 수가 증가할수록 방위각 추정오차가 감소하는 것을 알 수 있다. 또한 제안한 기법의 경우 부배열을 적용하지 않은 경우에 비해 상대적으로 더 적은 데이터 단편으로 공분산행렬 추정이 가능하며, 같은 데이터 단편의 경우 부배열을 적용하였을 때 보다 정확한 공분산행렬 추정이 가능하고 이로 인하여 방위각 추정 성능이 향상됨을 알 수 있다.
결과적으로 제안한 부배열을 이용한 STMV기법의 경우 기존의 초점조정 행렬을 이용한 광대역 적응빔형성기법(AV-WMVDR)과 부배열 사용하지 않은 STMV기법에 비해 안정적인 공분산행렬 추정을 위한 데이터단편의 수가 줄어들고 제한된 데이터 단편만이 사용 가능할 경우 부배열을 적용한 제안한 기법이 방위각 추정에서 보다 우수한 성능을 얻을 수 있다.
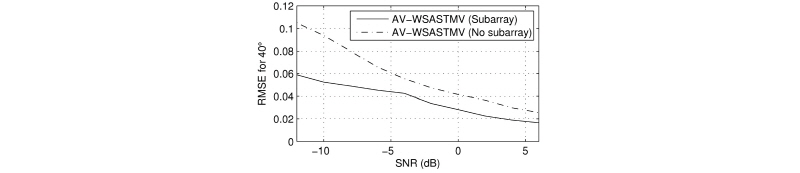
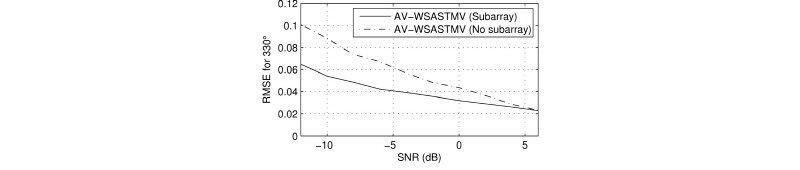
Figs. 6과 7은 Figs. 3과 4와 같은 조건에서 60개 주파수 빈 데이터를 이용하였으며 제안한 기법에서의 부배열 적용 여부에 따라 SNR에 따른 방위각 추정 성능을 보여주는 그림이다. 공분산 행렬 차원 기준으로 상대적으로 사용된 주파수 빈 데이터가 많을 경우 보다 정확한 공분산행렬 추정이 가능해지므로 부배열을 적용한 경우 방위각 추정 성능이 개선되는 것을 알 수 있다.
