I. 서 론
캠은 내연기관 엔진의 밸브 트레인에 적용되어, 연료 효율은 물론 엔진 소음 발생에 지대한 영향을 미친다. 엔진의 진동과 소음을 저감시키기 위해서는 캠축의 진동을 정확하게 분석, 파악하는 일이 필수적이다. 또한 캠은 여러 종류의 로보트를 포함하여 많은 자동화 기기에서 사용되고 있으며, 캠축의 구조 진동은 캠 기구설계에서 가장 중요한 과제 중의 하나로서 많은 연구자들의 관심의 대상이 되어 왔다.[1] 1925년경까지는 캠 기구는 단지 운동학적 관점에서만 해석되었으며, 단지 최대 가속도를 제한함으로써 과도한 진동을 방지하였다. 그러나 사용되는 기계의 속도가 증가하게 되면 이에 따른 구조 진동의 결과로 진동 가속도가 급격히 변화하고, 여러 형태의 바람직하지 못한 동역학적 거동이 나타나게 된다. 캠축의 강성이 부족하면 캠축의 진동이 캠 기구의 출력 운동에 영향을 미쳐 상대 운동의 오차가 발생하게 된다. 탄성 변형이 기구학적 거동에 비해 현저하게 작으므로 생략될 수 있다고 생각할 수 있으나, 출력 가속도의 왜곡이 급격한 동역학적 하중 및 충격의 원인이 될 수 있으므로 간과해서는 안 된다.[2] 특히, 캠축이 상대적으로 길거나 많은 메커니즘을 구동시키는 경우에는 심각한 결과를 초래할 수 있다. 많은 캠 기구에 관한 연구가 문헌조사로 발표되었다.[3,4] 캠축의 진동에 관하여는 진동 응답 최소화, 에너지 효율, 위치 오차 등의 다양한 주제로 연구가 진행되었다.[5, 6, 7, 8] 그러나 고속 운전에 따른 캠축의 구조 진동에 관한 연구는 미흡하고, 정확한 진동 해석 모델이 필요함에도 불구하고 찾아 볼 수 없다. 따라서, 본 연구에서는 캠축의 진동 응답을 구하는 유한요소 모델을 제시하였다.[9, 10] 캠축을 불균형 다단계 로터 베어링 계로 간주하여, 진동 해석 모델을 구성하였다. 캠의 종동절 변위 곡선에 근거하여 캠 윤곽을 결정하고, 회전 속도에 따른 하중 조건을 모사하였다. 유한요소 방정식을 유도하였고, Newmark’s method를 사용하여 진동 응답을 구하였다. V-8 엔진 캠축의 진동 응답을 측정하였고, 해석 결과와 비교하였다. 진동 응답과 응력에 근거하여, 응력 집중 효과를 고려하고 Goodmann 식을 사용하여 피로 해석을 수행하였다.
II. 유한요소 방정식
캠축은 축, 캠 로브, 그리고 유막 저어널 베어링으로 구성되어 있으며, 이는 불균형 다단계 로터 베어링 계로 해석될 수 있다. 축 부분은 Fig. 1과 같은 고속 축 요소로 구성할 수 있다.[11] 축 요소는 2 절점 요소로서 직선이며, 단면은 원형이다. 각개의 절점은 5 자유도로, 2개의 병진과 3개의 회전 변형을 갖는다. 회전관성, 자이로 모멘트, 전단 변형, 감쇠, 축 토크의 효과가 고려되었다. 축 요소의 유한요소 방정식은 다음과 같다.
|
Fig. 1. Unbalance disk element. |
| (1) |
여기에서
|
![]()
![]() 는 2x10 행렬이며,
는 2x10 행렬이며, ![]() 와
와 ![]() 는 형상함수이며,[8]
는 형상함수이며,[8]![]() 이다.
이다.
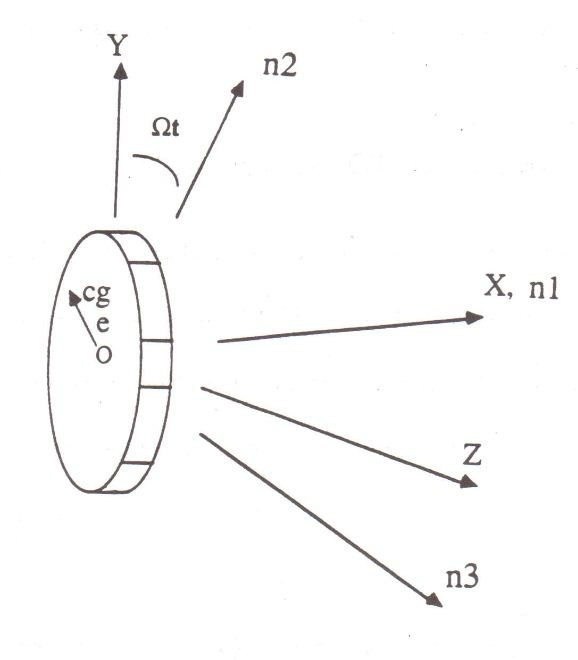
캠 로브 부분은 강성이 충분하므로 Fig. 1에서 보는 바와 같이 강체 불균형 원판 요소로 해석되었다. 원판 요소는 5 자유도를 갖는 점 요소이며, 2개의 병진과 3개의 회전 변위를 갖는다. 점 요소의 유한요소 방정식은 다음과 같다.
| (2) |
여기에서
|
 ,
,  ,
,  .
.![]()
![]() 는 질량, 관성 모멘트, 극관성 질량 모멘트이다.
는 질량, 관성 모멘트, 극관성 질량 모멘트이다. ![]() 와
와 ![]() 는 캠 로브와 종동절 사이의 접촉력이며,
는 캠 로브와 종동절 사이의 접촉력이며, ![]() 와
와 ![]() 는 불균형 질량으로 인한 가진력으로
는 불균형 질량으로 인한 가진력으로 ![]() 방향과
방향과 ![]() 방향의 힘을 나타내며,
방향의 힘을 나타내며, ![]() 는 토크를 나타낸다. 불균형 질량에 의한 힘
는 토크를 나타낸다. 불균형 질량에 의한 힘 ![]() 는 다음과 같다.
는 다음과 같다.
| (3) |
여기에서 ![]() 와
와 ![]() 는
는 ![]() 일때,
일때, ![]() 방향과
방향과 ![]() 방향의 편심량을 나타낸다.
방향의 편심량을 나타낸다.
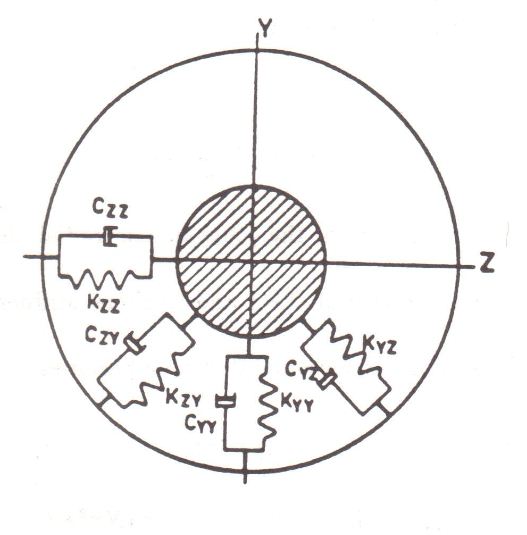
베어링은 Fig. 2에서 보는 바와 같이 8 계수 모델로 구성하였으며, 관성 효과는 생략되었다. 굽힘 거동에 관한 베어링 계수는 Lund[12]의 베어링 설계 핸드북이나 Rao[13] 또는 Vance[14] 가 제시한 식이나 그래프를 사용하여 근사할 수 있다. 비틀림 거동에 대해서는 베어링 마찰현상을 설명하는 Petroff 법칙에 근거하여 감쇠계수를 근사하였으며, 등가 비틀림 감쇠 계수 ![]() 는 다음과 같다.
는 다음과 같다.
|
Fig. 2. Fluid film journal bearing element. |
| (4) |
여기에서 ![]() 는 마찰 토크,
는 마찰 토크, ![]() 는 회전속도,
는 회전속도, ![]() 는 점성계수,
는 점성계수, ![]() 은 저어널 반경,
은 저어널 반경, ![]() 는 반경 틈새,
는 반경 틈새, ![]() 은 베어링 길이,
은 베어링 길이, ![]() 분당 회전수이다.
분당 회전수이다.
베어링 요소는 스프링과 감쇠로 구성되었으며, 저어널 중심에 위치한 점 요소로서, 2개의 병진 변위와 1개의 회전변위를 갖는 3 자유도 요소이다. 저어널 베어링은 양단에 있는 2개의 베어링 요소로 해석될 수 있다. 베어링 요소의 유한요소 방정식은 다음과 같다.
| (5) |
여기에서 ![]() ,
, ![]() 이며,
이며, ![]() 는 베어링 하중 벡터이다.
는 베어링 하중 벡터이다.
각 요소 방정식을 결합하여 구한 전체 시스템의 유한요소 방정식은 다음과 같으며, 이 방정식은 Newmark method를 사용하여 풀이 할 수 있다.
| (6) |
여기에서 ![]() ,
, ![]() ,
, ![]() 는 질량행렬, 감쇠행렬, 강성행렬이다.
는 질량행렬, 감쇠행렬, 강성행렬이다.
III. 진동 응력 해석
유한요소 해석에서는 변위를 아래와 같이 형상 함수와 절점 변위의 결합으로 나타낸다. 위 첨자 h는 이산 값을 나타낸다.
| (7) |
변형률-변위 관계식으로 부터 변형률벡터 ![]() 를 구할 수 있다.
를 구할 수 있다.
| (8) |
여기에서 ![]() 는 변형률벡터를 나타내는 미분 연산자이다. 응력벡터
는 변형률벡터를 나타내는 미분 연산자이다. 응력벡터 ![]() 를 구하면,
를 구하면,
| (9) |
여기에서 ![]() 는 응력-변형률 관계를 나타내는 행렬이다. 진동 응답에서와 같이 변위가 시간에 따라 변하면, 응력벡터도 시간 변화 함수로 표현된다.
는 응력-변형률 관계를 나타내는 행렬이다. 진동 응답에서와 같이 변위가 시간에 따라 변하면, 응력벡터도 시간 변화 함수로 표현된다.
| (10) |
구조물 또는 기계요소가 받는 최대응력이 극한강도보다 작을 때, 또는 항복응력보다도 작을 때에도, 오랜 시간동안 반복하여 변동하중이 작용하게 되면 파괴가 발생하는데, 이를 피로파괴라고 하며, 본 연구에서는 Goodmann 식을 이용하여, 진동에 의한 피로파괴를 평가하였다.
| (11) |
여기에서 ![]() 과
과 ![]() 은 변동응력의 평균과 진폭을 나타내며,
은 변동응력의 평균과 진폭을 나타내며, ![]() 와
와 ![]() 은 극한강도와 피로한계를 나타낸다.
은 극한강도와 피로한계를 나타낸다. ![]() 는 파괴 평가기준이며, 이 기준에 의하면
는 파괴 평가기준이며, 이 기준에 의하면 ![]() 가 1보다 작으면 안전하고, 1보다 크면 파괴가 발생한다. 비틀림 에너지 이론에 입각하여 von Mises 응력으로 다음과 같이 나타낼 수 있다.[15]
가 1보다 작으면 안전하고, 1보다 크면 파괴가 발생한다. 비틀림 에너지 이론에 입각하여 von Mises 응력으로 다음과 같이 나타낼 수 있다.[15]
| (12) |
아래 첨자 ![]() 는 단면의 방향을 나타낸다. 피로한계는 다양한 보정계수로 보정하여 적용하는데 식으로 나타내면 다음과 같다.[15]
는 단면의 방향을 나타낸다. 피로한계는 다양한 보정계수로 보정하여 적용하는데 식으로 나타내면 다음과 같다.[15]
| (13) |
여기에서 ![]() 은 보정된 피로한계이며,
은 보정된 피로한계이며, ![]() 는 회전축의 피로한계,
는 회전축의 피로한계, ![]() 는 표면 보정계수,
는 표면 보정계수, ![]() 는 크기 보정계수,
는 크기 보정계수, ![]() 는 신뢰성 보정계수,
는 신뢰성 보정계수, ![]() 는 온도 보정계수,
는 온도 보정계수, ![]() 는 피로 응력집중 보정계수이다.
는 피로 응력집중 보정계수이다.
| (14) |
여기에서 ![]() 는 응력집중계수이며,
는 응력집중계수이며, ![]() 는 노치 민감도이다.
는 노치 민감도이다.
IV. 진동응답 실험
V-8 엔진 캠축의 진동 응답을 구하는 실험을 수행하였다. 실험 장치는 엔진 스탠드, 캠축을 포함하는 벨브 트레인, DC 모터, 오일펌프 등으로 구성되었다. 가스 압력이 벨브 트레인에 미치는 영향은 본 연구의 관심이 아니므로 엔진은 DC 전기 모터를 사용하여 구동하였다. 크랭크축을 벨트전동에 의해 구동시켰으며, 캠축은 타이밍 벨트로 연결되었다. 오일펌프도 모터로 가동되었다. Fig. 3에서 실험장치의 개략도를 나타내었다.
|
Fig. 3. Brief sketch of experimental apparatus. |
Fig. 4는 본 연구에서 사용한 캠축을 나타내며, 캠축을 회전하는 축 요소, 캠을 나타내는 불균형 원판요소, 그리고 유막 저어널 베어링 요소로 나타낼 수 있음을 보여준다. 캠축의 B 지점에서 진동 응답을 측정하였으며, 두 개의 프록시메터를 직각으로 위치시켜 회전 진동궤도를 측정하였다. 프록시메터와 와이어가 민감하고, 장시간동안 건전성을 유지하기가 쉽지 않으므로 데이터를 저장한 후, 추후에 분석하였다. Fig. 5는 엔진속도가 4500 ![]() 일 경우에 캠 로브와 종동절 사이에 발생하는 접촉력과 토크를 나타내고 있다.[16]
일 경우에 캠 로브와 종동절 사이에 발생하는 접촉력과 토크를 나타내고 있다.[16]
|
Fig. 4. Configuration of camshaft. |
|
Fig. 5. Contact force and torque at 4500 |
V. 결과 및 토론
엔진속도가 4500 ![]() 일 때, 측정한 캠축의 회전 진동과 해석 결과로 얻어진 회전 진동을 Fig. 6에 나타내었다. 해석 시 캠축의 재료는 강으로 간주하였다. 여기에서 직선으로 나타낸 궤적은 Fig. 4에서 B 지점에서의 회전 진동을 측정한 값을 나타내며, 작은 원으로 나타낸 궤적은 베어링 계수가 일정한 경우에 해석한 결과로 얻어진 회전 진동 응답이다. 측정된 회전진동 응답은 약간의 요동 부분을 제외하면 타원형의 형태로 간주할 수 있으며, 이는 해석 결과와 비교적 잘 부합하는 것을 알 수 있다. 측정된 진동 응답은 복잡한 거동을 나타내고 있으나 주기성을 갖고 있음을 알 수 있다. 고속 운전 시에는 캠 로브와 종동절 사이의 접촉 하중이 요동치게 되며, 접촉이 분리되는 현상도 나타나게 된다. 이러한 현상은 캠축에 충격을 가하게 되고, 회전 진동이 요동하는 결과를 초래한다. 비선형성이 큰 접촉 하중은 베어링이 비선형적으로 반응하게 한다. 이는 베어링 계수가 부여되는 하중에 아주 민감하게 반응하기 때문이다. 또한 저어널 베어링의 편심이 클 경우에도 서로 접촉하는 평면사이에서 비선형적 상호관계가 나타나게 된다.
일 때, 측정한 캠축의 회전 진동과 해석 결과로 얻어진 회전 진동을 Fig. 6에 나타내었다. 해석 시 캠축의 재료는 강으로 간주하였다. 여기에서 직선으로 나타낸 궤적은 Fig. 4에서 B 지점에서의 회전 진동을 측정한 값을 나타내며, 작은 원으로 나타낸 궤적은 베어링 계수가 일정한 경우에 해석한 결과로 얻어진 회전 진동 응답이다. 측정된 회전진동 응답은 약간의 요동 부분을 제외하면 타원형의 형태로 간주할 수 있으며, 이는 해석 결과와 비교적 잘 부합하는 것을 알 수 있다. 측정된 진동 응답은 복잡한 거동을 나타내고 있으나 주기성을 갖고 있음을 알 수 있다. 고속 운전 시에는 캠 로브와 종동절 사이의 접촉 하중이 요동치게 되며, 접촉이 분리되는 현상도 나타나게 된다. 이러한 현상은 캠축에 충격을 가하게 되고, 회전 진동이 요동하는 결과를 초래한다. 비선형성이 큰 접촉 하중은 베어링이 비선형적으로 반응하게 한다. 이는 베어링 계수가 부여되는 하중에 아주 민감하게 반응하기 때문이다. 또한 저어널 베어링의 편심이 클 경우에도 서로 접촉하는 평면사이에서 비선형적 상호관계가 나타나게 된다.
|
Fig. 6. Camshaft whirl vibration at 4500 |
회전 기계에서 흔히 사용되는 유막 저어널 베어링은 회전 기계의 진동에 지대한 영향을 미친다. 로터 베어링 계의 강성은 주로 회전축을 지지해주는 베어링의 강성에 의해 결정되고, 감쇠도 베어링의 감쇠에 의해 결정된다. 베어링의 강성과 감쇠는 시스템에 가해지는 하중에 의해 결정된다.[12,13,14] 시간에 따라 변화하는 하중, 즉 시 변화 하중이 가해지면, 베어링 계수도 시간에 따라 변화하는 값을 갖게 된다. 하중이 선형적으로 변하거나, 급격한 변화 없이 부드럽게 변할 경우에는 베어링 계수 값을 일정한 값으로 부여하여 해석 결과로 얻어진 진동 응답이 실험에 의해 측정된 진동 응답과 잘 부합된다. 그러나 캠축이 아주 고속으로 회전하여, 캠축에 작용하는 하중이 급격하게 변하고, 충격이 가해지면, 비선형이며 시 변화 특성을 갖는 베어링 계수를 해석에 적용하여야 한다.
Fig. 7은 엔진 속도가 6500 ![]() 일 때, 선형 베어링 계수를 적용하여 해석 결과로 얻어진 회전 진동 응답과 측정한 회전 진동응답을 보여 주며, 현저한 차이가 있음을 알 수 있다. 이는 선형 베어링 계수를 적용하였기 때문이며, 고속 회전 시, 즉 가해지는 하중의 변화가 클 경우에는 하중의 변화에 상응하여 시간에 따라 변화하는 베어링 계수를 적용하여야 함을 보여 준다. 본 연구에서는 비선형 시 변화 베어링 계수를 산출하는 연구를 미래의 과제로 제시한다.
일 때, 선형 베어링 계수를 적용하여 해석 결과로 얻어진 회전 진동 응답과 측정한 회전 진동응답을 보여 주며, 현저한 차이가 있음을 알 수 있다. 이는 선형 베어링 계수를 적용하였기 때문이며, 고속 회전 시, 즉 가해지는 하중의 변화가 클 경우에는 하중의 변화에 상응하여 시간에 따라 변화하는 베어링 계수를 적용하여야 함을 보여 준다. 본 연구에서는 비선형 시 변화 베어링 계수를 산출하는 연구를 미래의 과제로 제시한다.
|
Fig. 7. Camshaft whirl vibration at 6500 |
Fig. 8에서는 캠축의 회전 진동 응답의 진폭과 변동 응력에 근거하여 얻어진 피로 평가 기준을 보여준다. 요소 번호 20에 해당하는 부분이 가장 취약한 것으로 나타나있다. 이때의 엔진 속도는 4500 ![]() 이며, 피로 평가 기준은 Goodmann 식을 사용하였다. 캠축의 회전 진동에서는 굽힘 효과가 지배적임을 알 수 있었고, 인접하는 베어링 간격에 가장 큰 영향을 받는 것으로 판명되었다. Fig. 4에서의 A지점이 진동으로 인한 파괴에 가장 취약한 것으로 분석되었다. 이는 지지점 간 스팬의 길이가 가장 긴 부분의 중간 부분에서 파괴가 발생함을 의미하며, 물리적으로 타당한 결과로 판단된다.
이며, 피로 평가 기준은 Goodmann 식을 사용하였다. 캠축의 회전 진동에서는 굽힘 효과가 지배적임을 알 수 있었고, 인접하는 베어링 간격에 가장 큰 영향을 받는 것으로 판명되었다. Fig. 4에서의 A지점이 진동으로 인한 파괴에 가장 취약한 것으로 분석되었다. 이는 지지점 간 스팬의 길이가 가장 긴 부분의 중간 부분에서 파괴가 발생함을 의미하며, 물리적으로 타당한 결과로 판단된다.
|
Fig. 8. Fatigue criteria of camshaft at 4500 |