

I. 서 론
II. LMF 알고리즘
III. 대수학적 가변 스텝 크기 LMF (Algebraic Optimal Step Size LMF, AOS-LMF)
3.1 대수학적 가변 스텝 크기 유도
3.2 수렴성 해석
IV. 시뮬레이션
4.1 시불변 시스템에서 수렴 성능 비교
4.2 급격하게 변하는 시변 시스템에서 수렴 성능 비교
4.3 연속적으로 변하는 시변 시스템에서 수렴 성능 비교
V. 결 론
I. 서 론
음향 통신과 음향 신호처리에서 필터를 설계하여 잡음을 동반한 데이터로부터 유용한 정보를 추출하고 있다. 이를 위한 필터 최적화 문제를 푸는 해결책 중 하나가 1949년에 발표된 Wiener 필터 설계 방법이다.[1] 그러나 Wiener 필터 설계는 처리될 신호들이 정재 상태(stationary)이어야 하고 또한 이들 신호들의 통계적 특성을 충분히 이용할 수 있어야 한다. 더욱이 최적 필터 계수를 구하기 위해 일명 Wiener-Hoffa 방정식이라고 불리는 많은 계산 량을 필요로 하는 선형 행렬 방정식을 풀어야 한다.[1,2] 그러나 적응 필터는 신호의 통계적 특성을 완전하게 알지 못하더라도 최적의 필터 계수에 근접할 수 있다. 즉, 적절하게 선택된 통계적 기준에 따라 계속해서 최적 필터 계수가 조정되고 입력 신호와 목표 신호 사이의 오차로부터 점차적으로 학습하면서 최적 필터에 근접해 간다. 이런 특징을 이용하고자 많은 연구자들이 적응 필터 방법 연구에 관심을 집중하여 왔다. 현재 적응 알고리즘은 시스템 인식(system identification), 잡음 제거, 에코 상쇄, 채널 등화 등 다양한 분야에 응용되고 있다.[2] 디지털 적응 필터 시스템은 Fig. 1과 같은 블록 다이어그램으로 나타낼 수 있다. 즉 필터 출력은 입력 신호를 이용하여 목표 신호를 적응적으로 추정하는 문제로 생각할 수 있다.
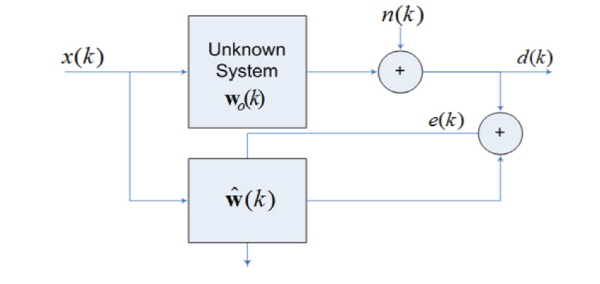
Fig. 1로부터 오차 신호는 다음 Eq.(1)과 같다.
 , (1)
, (1)
여기서  는 입력신호
는 입력신호  의 현재부터 N-1번째까지 N개의 샘플을 사용한 벡터이고,
의 현재부터 N-1번째까지 N개의 샘플을 사용한 벡터이고, 
 ,
,  은 차수가 N인 적응 디지털 필터 계수 벡터 이며,
은 차수가 N인 적응 디지털 필터 계수 벡터 이며, 

 ,
,  는 전치 행렬(transpose)을 나타낸다. 그 외에 부가 잡음
는 전치 행렬(transpose)을 나타낸다. 그 외에 부가 잡음  는 입력에 통계적으로 독립이고, 평균 ‘0’을 중심으로 대칭 분포를 이룬다고 가정한다.
는 입력에 통계적으로 독립이고, 평균 ‘0’을 중심으로 대칭 분포를 이룬다고 가정한다.
Fig. 1과 같은 구조의 적응 필터를 구하는 방법들 중에 하나인 최소평균자승 알고리즘은 실제 값과 추정 값 사이의 오차의 에너지 평균,  ,를 최소화 하는 변수를 추정한다. 또 다른 방법으로는 오차의 네 제곱, 즉
,를 최소화 하는 변수를 추정한다. 또 다른 방법으로는 오차의 네 제곱, 즉  를 최소화 하는 경우도 있다. 이를 최소평균사승 알고리즘이라고 한다.[3] LMS와 LMF 모두 최소화하는 변수를 얻기 위해서 급경사법(steepest descent)을 사용한다. 알려진 바와 같이 급경사법을 위해서는 추정 변수 값을 갱신하는 속도를 조절하기 위해서 스텝 크기를 사용한다.
를 최소화 하는 경우도 있다. 이를 최소평균사승 알고리즘이라고 한다.[3] LMS와 LMF 모두 최소화하는 변수를 얻기 위해서 급경사법(steepest descent)을 사용한다. 알려진 바와 같이 급경사법을 위해서는 추정 변수 값을 갱신하는 속도를 조절하기 위해서 스텝 크기를 사용한다.
LMF는 측정 신호가 비정규 분포 부가 잡음에 노출되었을 때 LMS 방법보다 우수하다고 알려져 있다. 특히 수렴 후 결과를 보면 LMF가 LMS보다 더 정확한 추정 결과를 생산한다.[4] 그러나 LMS나 LMF 모두 수렴 속도와 오차 성능이 스텝의 크기에 따라서 달라진다는 공통점도 있다.[2] 즉, 빠른 수렴 속도를 위해서는 큰 크기의 스텝이 필요하나 정확도가 떨어지고, 정확도 향상을 위해서 작은 크기의 스텝을 택한 경우 수렴 속도가 떨어진다.[2] 그러나 수렴 속도와 정확도 둘 다를 모두 만족하는 하나의 스텝 크기를 고정적으로 정하는 것은 불가능하다. 따라서 많은 연구자들에 의해서 스텝 크기를 상황에 따라 변화 시켜서 수렴 성능 향상을 꾀하는 가변 스텝 크기 알고리즘이 발표되었다.[5-8] 가변 스텝 크기 LMS는 1986에 처음 제안 되었고, 그 후 많은 유사한 알고리즘이 발표 되었다.[6] 가변 스텝 크기 알고리즘을 사용하면 LMS 알고리즘 수렴 초기에는 큰 크기의 스텝이 되어 빠른 수렴을 보장하고, 충분히 수렴하는 경우 작은 크기의 스텝이 되어 오차 성능을 향상 시키게 된다.[6] 이렇게 LMS 분야에선 가변 스텝 크기에 관한 발표가 많은데 반하여, LMF 분야에서는 가변 스텝 크기에 관한 연구가 상대적으로 적다.[9]
본 논문에서는 LMF에서 사용할 수 있는 스텝 크기 가변 방법을 제안한다. LMS나 LMF에서 기존에 발표된 많은 가변 스텝 크기 관련한 연구에서는 주로 급경사법을 기반으로 오차 에너지 또는 오차의 네 제곱을 최소화하는 스텝 크기를 찾는 접근법을 사용하였다. 이 접근 방법은 스텝 크기를 찾기 위해서 사용하는 식 안에 또 다른 수렴 상수를 사용하게 되어, 그 수렴 상수에 따라 스텝 크기의 변화에 영향을 주고, 다시 이것이 적응 필터의 수렴 속도 및 오차 성능에 영향을 주게 된다. 본 논문에서는 해석학적인 방법을 통한 스텝 크기 가변 방법을 제안한다. 해석학적인 방법을 사용하는 경우에는 스텝 크기를 구할 때, 앞에 기술한 것과 같이 외부적으로 또 다른 수렴 상수를 정해 주지 않는 장점이 있다. 그리고 제안된 알고리즘의 성능을 보이기 위해서 기존 LMF 알고리즘과 함께 시불변 시스템과 시변 시스템에 대한 시스템 인식 실험을 하고 그 수렴 성능을 비교한다.
II. LMF 알고리즘
본 장에서는 LMF 알고리즘을 요약한다. LMF는 오차의 네 제곱 즉  를 최소화 하는 하는 것이라고 서론에서 기술한 바 있다. 단 LMF에서는 오차의 네 제곱 값의 평균
를 최소화 하는 하는 것이라고 서론에서 기술한 바 있다. 단 LMF에서는 오차의 네 제곱 값의 평균  을 사용하는 대신, 오차의 네 제곱 순시값
을 사용하는 대신, 오차의 네 제곱 순시값  를 사용한다. 좀 더 구체적 말하면 다음과 같다.[2,3]
를 사용한다. 좀 더 구체적 말하면 다음과 같다.[2,3]
Fig. 1에서와 같이 

 과
과  를 각각 추정 시스템 계수 벡터와 참 시스템 계수 벡터라고 하자. 시간
를 각각 추정 시스템 계수 벡터와 참 시스템 계수 벡터라고 하자. 시간  에서 순시 오차는 다음 식과 같다.
에서 순시 오차는 다음 식과 같다.
여기서  . 순시 오차
. 순시 오차  의 4제곱 한 후
의 4제곱 한 후  에 대한 미분을 적용하면 다음과 같은 식을 얻을 수 있다.
에 대한 미분을 적용하면 다음과 같은 식을 얻을 수 있다.
 . (3)
. (3)
위 순시 미분 값을 사용 하여 다음과 같은 추정 시스템 계수 갱신 식이 유도된다.
여기서  는 스텝 크기다.
는 스텝 크기다.
III. 대수학적 가변 스텝 크기 LMF (Algebraic Optimal Step Size LMF, AOS-LMF)
3.1 대수학적 가변 스텝 크기 유도
 에서부터 스텝 크기
에서부터 스텝 크기  를 매 시간 마다 새로이 갱신하기 위해서 Zarzoso 와 Comon이 제안한 대수학적인 접근을 이용하여 아래와 같은 갱신식을 유도한다. Zarzoso와 Comon이 최초 제안한 대수학적 가변 스텝 크기 방법은 블라인드 등화기의 일종인 CMA에 대해서 유도 되었다.[10] 따라서 CMA와 목적 함수가 전혀 다른 LMF를 위한 대수학적 가변 스텝 크기 방법은 처음부터 새로이 유도되어야 한다. 이를 위하여 Eq.(4)의 양변에 입력 벡터를 곱하면 다음 Eq.(5)와 같다.
를 매 시간 마다 새로이 갱신하기 위해서 Zarzoso 와 Comon이 제안한 대수학적인 접근을 이용하여 아래와 같은 갱신식을 유도한다. Zarzoso와 Comon이 최초 제안한 대수학적 가변 스텝 크기 방법은 블라인드 등화기의 일종인 CMA에 대해서 유도 되었다.[10] 따라서 CMA와 목적 함수가 전혀 다른 LMF를 위한 대수학적 가변 스텝 크기 방법은 처음부터 새로이 유도되어야 한다. 이를 위하여 Eq.(4)의 양변에 입력 벡터를 곱하면 다음 Eq.(5)와 같다.
 (5)
(5)
Eq.(5)는 다음과 같이 출력 신호와 기울기 항[ ]으로 나타낼 수 있다.
]으로 나타낼 수 있다.
 , (6)
, (6)
여기서  . Eq.(6)을 LMF의 목적 함수에 대입하면 다음 Eq.(7)을 얻을 수 있다.
. Eq.(6)을 LMF의 목적 함수에 대입하면 다음 Eq.(7)을 얻을 수 있다.
Eq.(7)을 최소화하기 위하여 스텝 크기로 미분하면,  를 만족하는
를 만족하는  에 대한 3차 방정식을 구할 수 있다. 그 식은 다음 Eq.(8)과 같이 정리하여 나타낼 수 있다.
에 대한 3차 방정식을 구할 수 있다. 그 식은 다음 Eq.(8)과 같이 정리하여 나타낼 수 있다.
 (8)
(8)
여기서  ,
,  ,
, 
 ,
, 

 이다. 위의 Eq.(8)에서 구한 세 개의 근들 중에서 Eq.(7)인
이다. 위의 Eq.(8)에서 구한 세 개의 근들 중에서 Eq.(7)인  를 최소로 하는
를 최소로 하는  를 그 시간 단계에서의 새로운 스텝 크기로 선택한다. 위 3차 방정식을 풀기 위해서는 카르다노이 공식을 이용하거나 다른 수치해석적인 방법을 사용할 수 있다.[10]
를 그 시간 단계에서의 새로운 스텝 크기로 선택한다. 위 3차 방정식을 풀기 위해서는 카르다노이 공식을 이용하거나 다른 수치해석적인 방법을 사용할 수 있다.[10]
Table 1. Computational complexity comparison by flops. | ||
LMF | AOS-LMF | |
flops requirement per each iteration | 39,983,841 | 123,727,085 |
본 논문에서는 제안한 방법의 복잡도를 기존의 LMF의 복잡도와 비교하기 위해서 flops(floating point operations)를 측정 비교하였다. 이 방법은 대수학적 스텝 크기 constant modulus algorithm를 제안한 저자인 Zarzoso와 Comon[10]에 의해서도 사용한 방법이다. 해당 알고리즘의 flops를 측정하기 위해서 여러 연구자들이 사용하는 라이브러리1)를 사용하여 매트랩으로 작성된 알고리즘의 flops양을 측정하였다. 그 측정 결과를 Table 1에 정리하였다. Table 1의 결과를 보면 제안한 방법이 고정 스텝 크기 LMF에 비해서 약 3배의 복잡도를 요구하고 있음을 알 수 있다. 그러나 이 복잡도는 매 샘플마다 추정 벡터를 갱신할 때 요구되는 복잡도를 의미한다. 따라서 알고리즘이 수렴 상태에 도달할 때까지의 요구 복잡도를 생각한다면 알고리즘 복잡도에 대한 새로운 해석이 가능할 것이다. 이 복잡도는 시뮬레이션 부분에서 다시 정리하도록 하겠다.
3.2 수렴성 해석
수렴 해석을 위해서 목표 벡터  를 시불변 벡터라고 가정하고 다음과 같이 추정 벡터 오차를 정의한다.
를 시불변 벡터라고 가정하고 다음과 같이 추정 벡터 오차를 정의한다.
 . (9)
. (9)
위 Eqs.(9)와 (4)로부터 다음과 같이 추정 벡터 오차의 갱신식을 구할 수 있다.
위 식 양변에 평균을 취하면 다음 식과 같다.
여기서  는 앙상블 평균을 의미한다. 위 Eq.(11)에서
는 앙상블 평균을 의미한다. 위 Eq.(11)에서  를 정규 분포를 갖는 잡음신호라고 가정할 때,
를 정규 분포를 갖는 잡음신호라고 가정할 때,  의 자승 항을 제외한 홀수 항들의 평균은 ‘0’이다. 또 References [12]와 [13]의 결과에서
의 자승 항을 제외한 홀수 항들의 평균은 ‘0’이다. 또 References [12]와 [13]의 결과에서 
 라는 결과를 응용하여 Eq.(11)의 마지막 항은
라는 결과를 응용하여 Eq.(11)의 마지막 항은  이 된다. 그 결과 다음과 같은 최종식을 얻을 수 있다.
이 된다. 그 결과 다음과 같은 최종식을 얻을 수 있다.
 , (12)
, (12)
여기서  이고
이고  은 입력 신호 벡터의 상호 상관 행렬로
은 입력 신호 벡터의 상호 상관 행렬로  이다. Eq.(12)으로부터 다음과 같은 근사적 수렴 조건을 얻을 수 있다.
이다. Eq.(12)으로부터 다음과 같은 근사적 수렴 조건을 얻을 수 있다.
 , (13)
, (13)
여기서  는 입력 신호 벡터의 상호 상관 행렬의 최대 고유치이다. 그리고 Eq.(13)으로부터 다음과 같은 수렴을 위한 스텝 크기의 필수조건을 얻을 수 있다.
는 입력 신호 벡터의 상호 상관 행렬의 최대 고유치이다. 그리고 Eq.(13)으로부터 다음과 같은 수렴을 위한 스텝 크기의 필수조건을 얻을 수 있다.
 . (14)
. (14)
IV. 시뮬레이션(Algebraic Optimal Step Size LMF, AOS-LMF)
본 장에서는 시뮬레이션을 통해서 제안한 알고리즘의 수렴 성능을 알아본다. 이를 위해서 시간에 상관없이 특성이 일정한 시불변 시스템에 대해서 일반 LMF와 III장에서 제안한 AOS-LMF의 수렴 성능을 비교한다. 그 외에 실험 중간에 채널이 갑자기 바뀌는 시변 시스템과 연속적으로 채널 계수가 바뀌는 시변 시스템에 대해서도 각각 수렴 성능을 비교한다.
4.1 시불변 시스템에서 수렴 성능 비교
제안된 알고리즘의 일반적인 수렴 성능을 보이기 위해서 시불변 시스템 환경하에서 수렴 실험을 하였다. 실험에 사용된 환경을 구체적으로 기술하면, 시스템의 임펄스 응답이  = [-0.3, -0.9, 0.8, -0.7, 0.6]인 시불변 채널 상에서 제안된 알고리즘과 전통적인 고정 스텝 크기 LMF의 수렴 성능을 각각 비교하였다. 이 때 사용한 고정 스텝 크기 값은 0.01, 0.05 및 0.1로 설정하였다.
= [-0.3, -0.9, 0.8, -0.7, 0.6]인 시불변 채널 상에서 제안된 알고리즘과 전통적인 고정 스텝 크기 LMF의 수렴 성능을 각각 비교하였다. 이 때 사용한 고정 스텝 크기 값은 0.01, 0.05 및 0.1로 설정하였다.
 =0.01)
=0.01) =0.1)
=0.1)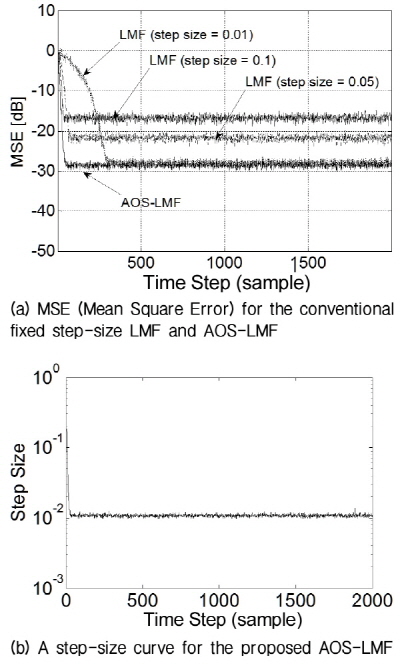
Fig. 2을 보면 제안한 AOS-LMF가 스텝 크기를 스스로 가변 하여 초기에는 빨리 수렴하고 수렴 후에는 작은 오차를 유지할 수 있게 하고 있음을 알 수 있다. 반면에 고정 스텝 크기 LMF의 경우 작은 크기 스텝을 사용할 때는 MSE(Mean Square Error)가 작으나 수렴 속도가 느리고, 큰 스텝 크기를 사용할 경우 수렴 속도가 빠르나 MSE가 큰 것을 알 수 있다. 또 이 실험을 통해서 3.1절에서 언급한 계산 복잡도에 대한 또 다른 결과를 정리한다. 3.1절에서는 한 회 갱신할 때 요구되는 flops를 정리하였지만, 이번 실험에서는 수렴할 때까지 드는 계산 복잡도를 측정하려고 한다. 비교를 위해서 고정 스텝 크기 LMF 중 제일 빨리 수렴하는( =0.1)인 경우와 MSE가 가장 작은 (
=0.1)인 경우와 MSE가 가장 작은 ( = 0.01)인 경우를 제안한 AOS-LMF와 비교하여 그 결과를 Table 2에 정리하였다. 수렴 시까지의 총 flops를 비교를 위해서 Fig. 2의 수렴 곡선을 분석해서 (
= 0.01)인 경우를 제안한 AOS-LMF와 비교하여 그 결과를 Table 2에 정리하였다. 수렴 시까지의 총 flops를 비교를 위해서 Fig. 2의 수렴 곡선을 분석해서 ( = 0.1)인 LMF는 50회 만에 수렴하였고, (
= 0.1)인 LMF는 50회 만에 수렴하였고, ( =0.01)인 LMF는 300회 만에 수렴하였고, AOS-LMF는 50회만에 수렴하였음을 각각 반영하였다.
=0.01)인 LMF는 300회 만에 수렴하였고, AOS-LMF는 50회만에 수렴하였음을 각각 반영하였다.
위 Table 2의 결과를 보면 가장 작은 MSE 수준으로 수렴할 때까지 요구되는 flops를 보면 AOS-LMF가 가장 적은 flops를 요구함을 알 수 있다. 따라서 제안한 방법이 매회 추정 벡터 갱신에는 많은 계산량을 요구하지만 빨리 그리고 작은 MSE로 수렴함으로 전체적으로 봐서 더 적은 계산량을 요구하는 알고리즘이라고 할 수 있다.
4.2 급격하게 변하는 시변 시스템에서 수렴 성능 비교
제안된 알고리즘의 가변 스텝 크기 성능을 보기 위해서 급격히 변하는 시변 시스템 환경하에서 수렴 실험을 하였다.
실험에 사용된 환경을 구체적으로 기술하면, 처음부터 2000번 샘플까지는 시스템의 임펄스 응답이  = [-0.3, -0.9, 0.8, -0.7, 0.6]이다가 2001번 샘플부터 임펄스 응답이
= [-0.3, -0.9, 0.8, -0.7, 0.6]이다가 2001번 샘플부터 임펄스 응답이  = [0.6, -0.7, 0.8, -0.9, -0.3]로 갑자기 변하는 시변 채널 상에서 제안된 알고리즘과 전통적인 고정 스텝 크기 LMF의 수렴 성능을 각각 비교하였다. 이 때 사용한 고정 스텝 크기 값은 0.01, 0.05 및 0.1로 설정하였다.
= [0.6, -0.7, 0.8, -0.9, -0.3]로 갑자기 변하는 시변 채널 상에서 제안된 알고리즘과 전통적인 고정 스텝 크기 LMF의 수렴 성능을 각각 비교하였다. 이 때 사용한 고정 스텝 크기 값은 0.01, 0.05 및 0.1로 설정하였다.
Fig. 3을 보면 제안한 AOS-LMF가 시불변 특성을 유지하다 갑자기 변하는 경우에도 잘 적응하고 있는 것을 알 수 있다.
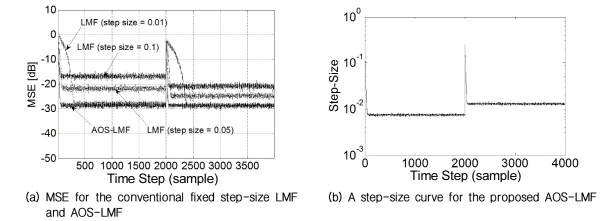 Fig. 3. Convergence performance comparison in the abruptly-changing channel. |
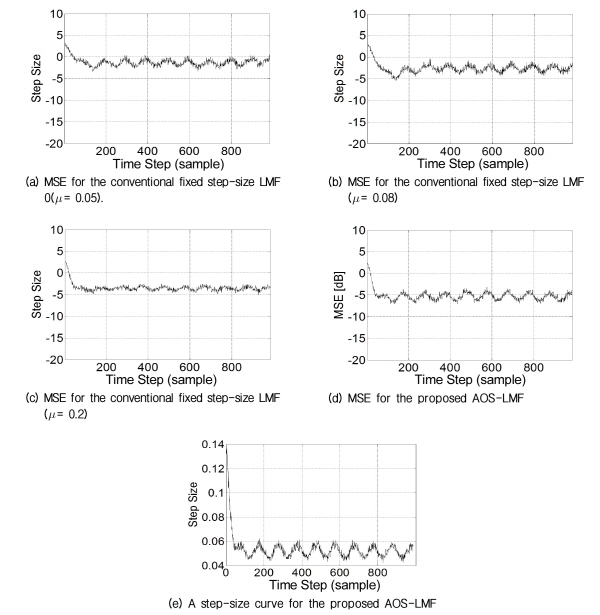 |
Fig. 4. Convergence performance comparison in the continuously-changing channel. |
4.3 연속적으로 변하는 시변 시스템에서 수렴 성능 비교
시스템이 계속적으로 변하는 경우에 제안된 알고리즘의 추적 성능을 보기 위하여 연속적으로 변하는 시변 임펄스 응답을 갖는 환경을 설정하고, 추정 오차를 관찰함으로써 제안된 알고리즘의 연속 추적 능력을 보인다. 사용된 채널은 다음 식과 같이 모델로 설정 하였다.
 , (15)
, (15)
여기서  , for i = 0,1, …,
, for i = 0,1, …,  -1이고
-1이고  는 샘플간 시간 간격이다. 또
는 샘플간 시간 간격이다. 또 
 이다. 전체 시간은 100000
이다. 전체 시간은 100000 동안 샘플을 발생 시킨다.
동안 샘플을 발생 시킨다.  는 전 시뮬레이션 기간 중에
는 전 시뮬레이션 기간 중에  에서
에서  까지 선형적으로 변하도록 한다. 계수
까지 선형적으로 변하도록 한다. 계수  와
와  는 서로 독립인 백색 가우시안 잡음을 다음과 같은 필터에 각각 통과 시켜서 얻는다.
는 서로 독립인 백색 가우시안 잡음을 다음과 같은 필터에 각각 통과 시켜서 얻는다.
 , (16)
, (16)
여기서  는 채널의 페이딩율이라고 한다.[13] 이 값은 도플러가
는 채널의 페이딩율이라고 한다.[13] 이 값은 도플러가  이고, 심볼율이
이고, 심볼율이  일 때,
일 때, 
 이다.[14] 사용한 채널의 길이
이다.[14] 사용한 채널의 길이  =16으로 하고,
=16으로 하고,  으로 설정하였다.
으로 설정하였다.
Fig. 4를 보면 작은 고정 스텝 크기를 사용한 LMF는 변화를 따라가지 못하고 있다. 스텝의 크기가 늘면 변화를 좀 더 잘 따라 가는 결과를 생산하지만, 좀 더 스텝 크기를 크게 하면 다시 수렴 성능이 나빠지는 것을 관찰 할 수 있다. 그 이유는 사용하는 채널의 변화가 한 방향으로 변하는 것이 아니어서 한 값의 스텝 크기로 좋은 수렴 성능을 보장하기는 어렵다. 반면에 제안된 AOS-LMF는 여러 고정 스텝 크기 LMF와 비교할 때, 변화 흐름에 맞춰 변화는 스텝 크기를 산출하여 더 좋은 적응을 하고 있음을 알 수 있다.
