

I. 서 론
일반적인 소나 시스템에서 표적 탐지나 위치 정보 추정뿐만 아니라 근접장에서 이동하는 수중 이동체로부터 방사되는 소음을 측정하여 분석하는 것 역시 중요한 문제 가운데 하나이다. 이러한 목적을 위하여 해외에서는 수직 또는 수평으로 배열된 다수의 고정 수신기들과 빔 형성 기법 등을 적용하여 운용하고 있다.[1] 하지만 이는 큰 규모의 시스템으로 설치 운용이 쉽지 않고, 많은 비용이 요구된다. 특히, 수중 이동체의 방사 소음 측정은 해상 교통량이 거의 없는 조용한 해역에서 이루어져야 하나 국내의 경우 연안 해상 교통량이 많아 이러한 조건을 만족하는 해역은 육상으로부터 멀리 떨어져야 하며 이 경우 해외 사례와 같은 수신기 배열 시스템의 설치와 운용은 어렵게 된다. 따라서 이러한 제한 조건을 감안한다면 적은 비용으로 설치 운용이 비교적 수월한 방법이 필요하다. 이에 본 논문에서는 근접장에서 수중 이동체의 방사 소음을 분석하기 위해 하나의 수신기를 이용하여 가상 배열을 합성하는 방법을 제안한다. 기존에 합성 개구면 소나에서 가상 배열을 구성하는 방법에는 ETAM(Extended Towed array Measurement), FFTSA(Fast Fourier Transform Synthetic Aperture) 방법 등이 있으나 이들은 시간 영역 또는 빔 영역에서 모두 물리적으로 수신기 배열로 구성되어 있는 상태에서 가상으로 배열 길이를 확장하는 방법이다.[2-4] 무엇보다도 이들 방법들은 견인형 배열을 이용하여 이동하면서 가상 배열을 구성하기 때문에 근접장에서 수중 이동체의 방사 소음 측정 환경과는 차이가 있다.
제안한 방법에서는 음원과 단일 수신기 위치 사이의 가역성(reciprocity)을 이용하여 가상 배열을 구성한다. 이러한 가상 배열 구성 과정에서 발생하는 문제 가운데 하나는 수중 음원의 이동성 때문에 발생하는 도플러 효과인데 지상과는 달리 수중에서는 신호의 전달 속도가 낮으므로 도플러 주파수를 무시하기 어렵다. 도플러 효과가 발생하면 수신되는 신호의 주파수가 원래 음원에서 방사되는 신호의 주파수와 다르게 되면서 측정의 정확도가 감소한다. 이러한 문제를 해결하기 위해 수중 이동체의 이동 속도와 위치 정보 등을 이용하여 도플러 주파수를 보상한다. 다음으로 가상으로 구성된 수신기들 사이의 시간차를 보상하고, 근접장에서의 초점 빔 형성 기법을 적용한다. 이러한 제안한 방법의 성능을 모의실험을 수행하여 분석하였다.
이 논문의 구성은 서론에 이어 제안한 방법, 모의실험 및 결과, 그리고 결론으로 구성되어 있다. 제안한 방법에서는 논문에서 고려하는 환경 및 가상 합성 배열을 구축하기 위한 과정을 설명하고, 3장에서 제안한 방법을 사용한 모의실험 및 결과물을 보여준다. 앞 장들의 내용을 토대로 결론에서 마무리 짓는다.
II. 제안한 방법
2.1 기존의 연구
기존에 움직이는 음원의 수심 추정을 위해 가상 합성 수신 배열을 구성하여 물리적인 수신기 배열의 효과를 내는 방법이 연구되었다. 그 결과로써 수직 선형 배열을 이용하여 음원의 수심을 추정한 것과 단일 수신기로 음원의 수심을 추정한 방법의 성능을 비교 하였다.[5] 이러한 기존의 연구에서는 움직이는 음원에 대한 수심 추정을 위하여 음원의 수심은 모르지만 이동하는 거리의 범위는 알고 있다는 가정을 하였다. 이와 같이 위치 정보 또는 거리 정보를 알아야 하는 이유는 움직이는 음원에 의해 발생하는 도플러 주파수가 빔 형성 성능에 영향을 미치게 되기 때문이다.
2.2 시스템 모델
이 논문에서 고려하는 환경은 Fig. 1과 같다. 그림에서 고정된 수신기의 위치 (xr, yr)는 GPS(Global Positioning System) 등을 이용하여 알 수 있고, 수중 이동체의 이동 속도 v와 직선 이동 경로 및 위치는 음원에 설치한 송신기로부터 방사되는 핑을 이용한 FOA(Frequency-of-Arrival) 추정과 같은 방법들로 추정할 수 있다.[6] 따라서 수중 이동체의 위치 정보는 알고 있다고 가정한다. 또한 음원과 수신기 위치 사이의 가역성이 성립하는 채널을 가정하는데 이는 음원과 수신기의 위치를 서로 반대로 바꾸더라도 수신되는 신호는 같다는 의미이다. 따라서 실제 운용 환경은 Fig. 1과 같지만 가역성을 이용하면 반대로 음원의 위치가 고정되어 있고 수신기가 이동하는 것으로 바뀌어 있다고 생각할 수 있다.
일반적으로 수중 이동체에서 발생하는 소음은 토널 신호와 광대역 성분의 조합[7]이나 본 연구에서는 토널 신호 분석을 목적으로 하므로 음원으로부터 방사되는 신호 g(t)는 Eq. (1)과 같이 다수의 토널 성분의 합으로 표현하였다.

Fig. 1과 같은 환경에서 부가 잡음을 무시한다면 수신되는 수중 이동체의 토널 소음 신호 s(t)는 Eq. (2)와 같이 표현된다.
여기서 αi(i=1,…,n)는 수중 채널 전달 과정에서 주파수 별로 나타내는 감쇄율로써 보통 수중에서는 주파수가 높을수록 감쇄율이 증가하지만 이 논문에서 분석 대상인 토널 신호들의 주파수 차이는 크지 않고 근접장을 대상으로 하므로 이에 대한 영향은 상대적으로 작다고 가정하였다. 또한 fdi(i=1,…,n)는 이동성으로 인하여 발생하는 주파수 별로 갖는 도플러 주파수이며, τ는 이동하는 음원과 수신기 사이의 거리 차로 인해 발생하는 시간 지연이다.
Fig. 1과 같은 환경에서 수중 이동체는 x축을 따라 일정한 속도 v로 이동하므로 시간의 흐름에 따라 수중 이동체와 수신기 사이의 거리 및 각도, 즉 시간지연과 도플러 주파수가 변화한다. 음원과 수신기의 수심이 같다고 한다면 시간에 따라 변화하는 음원의 x축 위치 좌표 xs (t), 거리 R(t)와 각도 θ(t), 시간지연 τ(t) 및 도플러 주파수 fdi(t)는 다음과 같다.
| $$x_s(t)=x_0+vt,$$ | (3) |
| $$R(t)=\sqrt{(\vert x_r-x_s(t)\vert)^2+(\vert y_r-y_s\vert)^2},$$ | (4) |
| $$\theta(t)=\arctan\;(\frac{y_r-y_s}{\vert x_r-x_s(t)\vert}),$$ | (5) |
| $$\tau(t)=\frac{R_0-R(t)}c,$$ | (6) |
| $$f_{di}\;(t)=f_i\;\frac vc\;cos\;(\theta(t)).$$ | (7) |
Eq. (3)에서 x0는 가상 배열에서 시작점의 위치로써 이동 경로와 수신기 사이의 최근접점을 기준으로 대칭이 되도록 하였다. Eqs. (6)과 (7)에서 c는 수중에서의 음속이며, 1500 m/s로 가정하였다. 위에서 정의된 변수들을 이용하면 수신된 신호에 포함된 시간지연과 도플러 함수에 대해 보정이 가능하다.
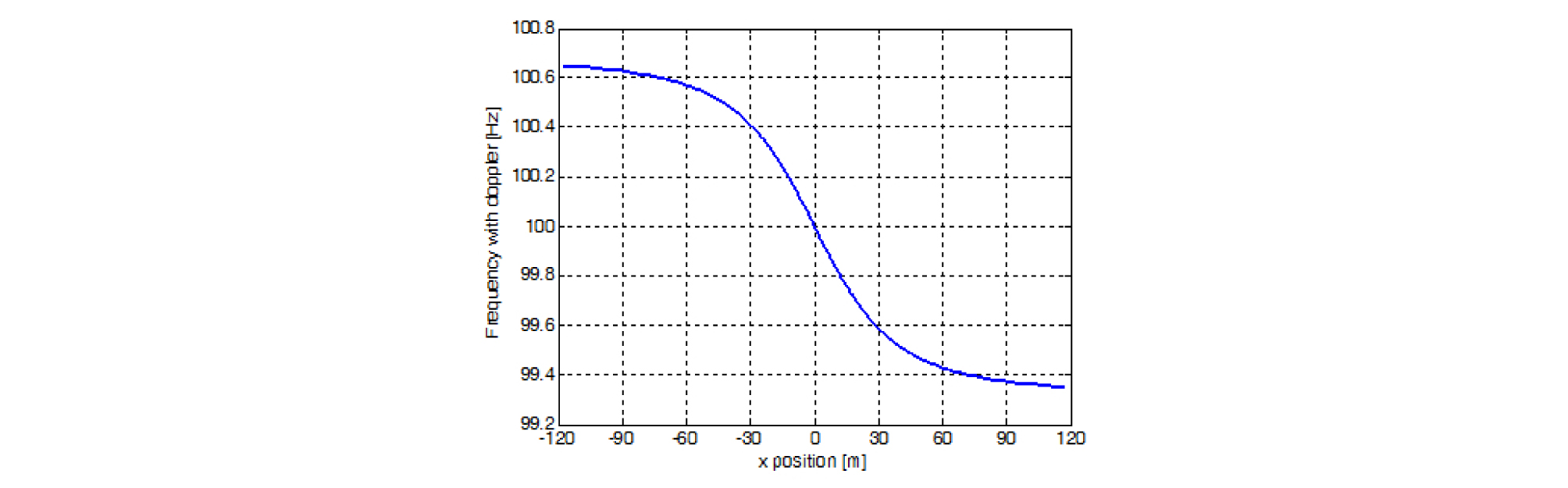
Fig. 2는 수중 이동체의 속도를 20 knot로 가정하였을 때 100 Hz 신호 성분의 x좌표 변화에 따른 주파수의 변화이다. x축 좌표가 0인 지점에서 도플러 주파수는 0 Hz가 되면서 원래의 주파수 100 Hz와 일치하는 것이 보인다. 이러한 주파수의 변화는 수중 이동체가 계속 이동하므로 연속적이며, 변화율도 일정하지 않다. 변화율이 일정하지 않은 이유는 수중 이동체의 절대적인 속도는 일정하지만 수신기와의 각도가 계속하여 변화하기 때문이다.
2.3 가상 배열 구성
이 논문에서는 위의 그림과 같이 도플러 효과로 인해 발생하는 도플러 주파수 fdi(t)항에 대해서 시간영역에서의 보간법을 사용하여 보정한다. Fig. 2에서 보이는 것과 같이 수중 이동체의 이동에 따라 주파수는 연속적으로 변화하고 그 변화율은 일정하지 않다. 따라서 보간법을 이용하기 위해서는 위치정보에 따라 변화하는 주파수 값에 대응하여 시간 좌표를 재구성해야 한다.
먼저 수중 이동체의 이동거리 dmoving를 속도 v로 나누면 전체 이동 시간이 된다.
| $$t_{moving}=\frac{d_{moving}}v.$$ | (8) |
따라서 수신기에 수신되는 신호의 시간 좌표는 샘플링 주파수에 의해 샘플 단위로 구성되는데 샘플링 주파수를 fs라고 한다면 다음과 같이 정의된다.
| $$t=0\;:\frac1{f_s}:t_{moving}.$$ | (9) |
이 시간 좌표는 발생하는 도플러 주파수의 크기에 따라 수축과 팽창을 하게 되고 이에 대해 보정한 시간 좌표는 다음과 같이 정의된다.
| $$t_c=t\times\frac{f_i}{f_i+f_{di}(t)}.$$ | (10) |
수신된 신호를 관심 주파수 fi에 대한 대역 통과 필터 처리를 하면 Eq. (2)에서의 주파수 성분들은 (fi+fdi)를 포함하는 항을 제외하고 제거된다. 단일 토널 성분과 그에 해당하는 도플러 주파수만 포함된 신호는 Eq. (10)에 의해 정의된 시간 좌표에 대한 보정을 통해 도플러 주파수 성분을 제거할 수 있다. 그러나 기존의 시간 좌표는 fs에 의해 정해진 동일한 시간 간격마다 구성되어 있으므로 도플러 주파수의 크기에 따라 조정하고자 하는 시간이 시간 샘플 사이의 값을 가져야 하는 경우가 발생한다. 이러한 샘플링 문제를 해결하기 위해 보간법을 사용하여, 동일한 간격의 시간 샘플 사이의 새로운 시간 샘플을 만들어 시간 좌표 상의 보정을 수행한다.
도플러 주파수 보정이 수행된 후 가상 배열을 합성한다. 가상 배열을 합성할 때 가상 수신기 사이의 간격은 관심 주파수의 파장 길이에 맞추어 설계하는데 일반적인 배열 이론에서 수신기 사이 거리는 반파장 이하의 간격으로 구성되므로 본 논문에서도 반파장 간격으로 설정하였다.
수신기와 수중 이동체 사이의 좌표 정보와 이동 경로, 구조적인 측면에서 볼 때, 가역성이 존재하므로 수신기와 수중 이동체의 움직임을 바꾸어 생각해도 동일한 현상으로 볼 수 있다. 따라서 가상 배열의 구축의 편의성을 위해 하나의 수신기가 이동을 하며 고정되어 있는 음원으로부터 신호를 수신하였다고 생각한다면 수신기 간의 거리만큼 이동하는 동안에 수신된 신호를 가상 수신기 하나가 수신한 신호가 되고 각 수신기가 수신한 신호는 Eq. (11)과 같이 정의된다.
| $$\begin{array}{l}s_k(t)=A\;exp\;\left[j2\pi\;f\;(t+\tau+\frac{d_sk}v)\right],\\\;\;\;\;\;\;\;\;\;\;\;\;(k=0,1,2,..,N-1).\end{array}$$ | (11) |
이 식에서 N은 가상 배열 내의 수신기의 수이며, ds는 가상 수신기 사이의 간격이다.
가상 수신기의 수는 수중 이동체의 소음을 수신하는 동안의 이동 거리와 가상 수신기 사이의 거리 관계에서 추산되며, 범위 내에서 원하는 수신기의 수를 설정할 수 있다. Eq. (11)에서 τ항은 수신 배열의 거리 차에 의해 발생하는 지연 시간이고, 항은 수신기 간의 거리를 이동하는 동안 발생하는 지연시간이다. 가상 배열을 구축하고 물리적인 수신 배열과 같이 각 가상 수신기가 동시에 신호를 수신하는 것과 같은 효과를 갖기 위해서는 항에 대한 보정이 필요하다. 제안한 방법에서는 가상 수신기 간의 거리와 수중 이동체의 이동 속도 정보를 모두 안다고 가정하였기 때문에 이에 대한 보정이 가능하다.
수신된 신호에 대해 도플러 주파수에 대한 보정과 가상 배열 합성이 수행되면 주파수 별로 근접장에서의 초점 빔 형성 기법을 통해 수중 이동체의 소음세기를 측정한다. 초점 빔 형성 방법에는 최소 분산 빔 형성 기법 등 다양한 형태가 있으나 이 논문에서는 초점 빔 형성이 주요 목적은 아니므로 고전적인 지연-합 빔 형성 기법을 적용하였다.[8,9]
III. 모의실험 및 결과
제안한 방법의 성능을 확인하기 위해 모의실험을 Matlab 프로그램을 이용하여 수행하였다. Fig. 1에서와 같이 수중 이동체는 x축을 따라 일정한 속도 v로 이동하는 상황을 가정하였으며, 시간에 따른 위치 정보를 정확하게 알고 있는 경우와 위치 정보에 오류가 발생하여 부정확하게 알고 있는 경우를 각각 고려하였다. 수신기의 위치는 음원의 이동 경로에서 최근접점 (0,0) 으로부터 40 m 떨어진 (0,40) m로 설정하였으며, 음원은 (0,0) 지점을 기준점으로 하여 대칭되는 경로를 이동하는 것으로 가정하였다. 또한 음원과 수신기의 수심은 같다고 가정하였는데 실제 환경은 3차원 공간이지만 수심 오차에 의한 오류는 결국 음원과 수신기의 거리 차에 따른 보정계수들의 오차발생으로 나타날 것이므로 위에서 언급한 위치정보 오차의 연장선에 있는 문제로 판단되어 논의의 편의성을 위해 2차원 공간 모델로 제한하였다. 샘플링 주파수 fs는 100 kHz로 하였으며, SNR(Signal-to-Noise Ratio)은 -5 dB로 가정하였다. 가상 배열을 구성하는 수신기의 수는 26개로 하였는데 이는 각 주파수 별로 반파장의 길이가 다르므로 가상 배열의 전체 길이도 주파수에 따라 다르게 된다. 또한 수신되는 신호의 길이도 달라지므로 빔 형성 출력 이후에 출력 값의 크기 비교를 위해 신호 길이의 차이(주파수의 비율)에 대한 보상 후에 비교하였다. 전체적인 처리 과정의 흐름은 Fig. 3과 같다.

모의실험에 사용된 신호는 세 가지의 토널 주파수(100 Hz, 200 Hz, 300 Hz) 성분을 갖고, 각 주파수별로 크기는 (0 dB, 3 dB, 1.1 dB)의 비율을 갖도록 하였다. Fig. 4는 가상 합성 수신 배열을 이용하여 수신된 신호와 공간상에 다수의 수신 배열 센서가 배치된 경우에 수신된 신호를 비교한 것이다. 파형의 차이를 시각적으로 쉽게 느낄 수 있도록 도플러 주파수가 300 Hz인 대역을 나타내었다. Fig. 4(a)는 26개의 물리적인 수신기 배열 중 13번 수신기에 수신된 신호가 대역통과필터를 통과한 후의 파형과 26개의 가상 합성 수신 배열 가운데 13번 수신기에 수신된 신호의 대역통과필터 통과 후의 파형을 나타낸 것으로 가상 수신기 출력을 구성하기 위한 보정 처리를 하지 않은 경우이다. Fig. 4(b)는 Fig. 4(a)와 같은 조건에서 가상 합성 수신 배열에서 물리적인 수신 배열의 효과를 보기 위해 도플러 보상 및 위상 보정 처리를 한 후의 파형 이다. 보정을 하지 않은 경우 도플러 천이로 인하여 파형에 차이를 보이지만 보정을 마친 가상 합성 배열의 파형은 물리적인 수신기 배열에서 수신된 파형과 거의 같은 형태를 갖는 것을 확인할 수 있다.
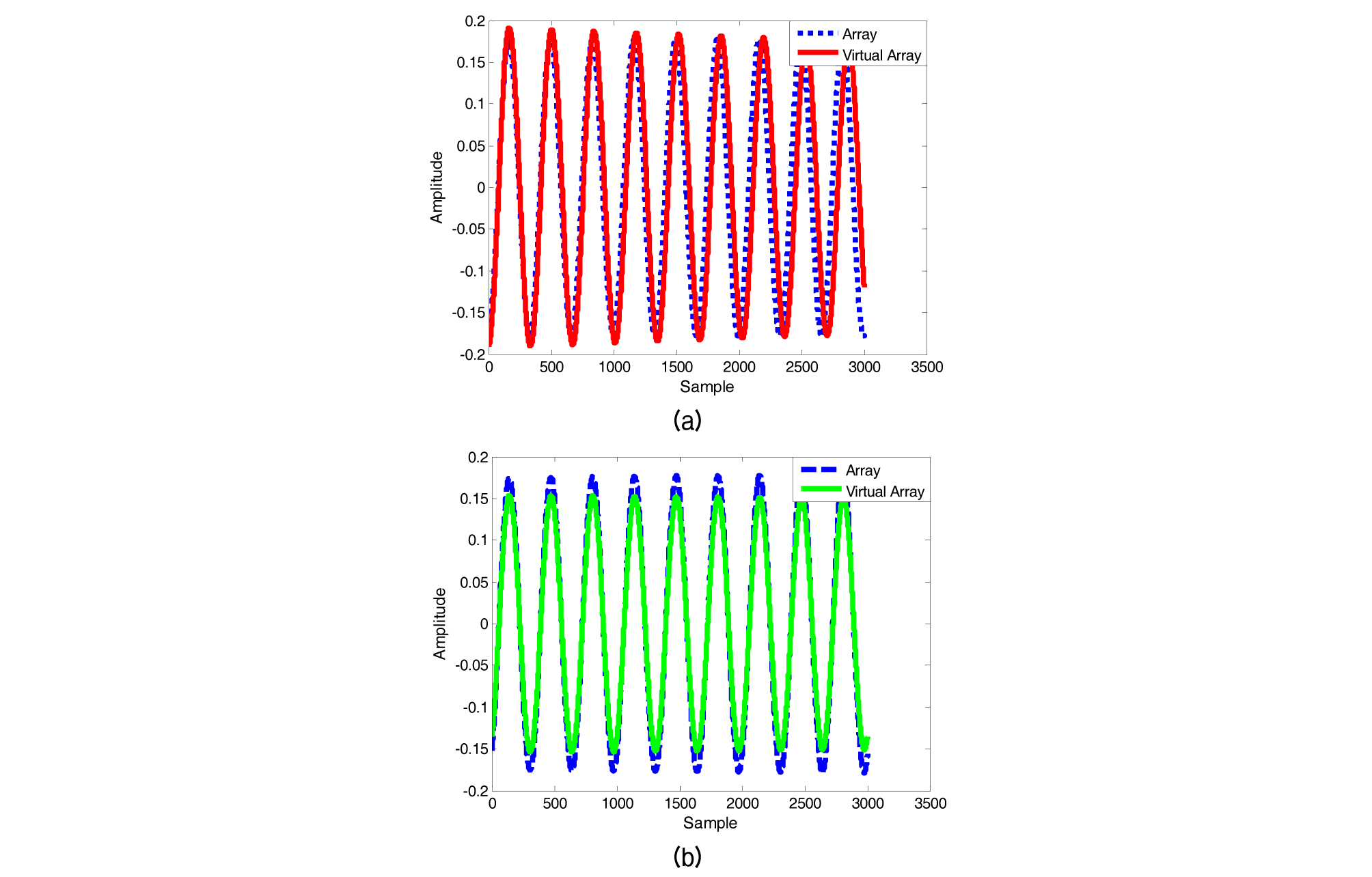
Fig. 5(a)~(c)는 음원의 이동 속도가 20 kn인 경우 가상 배열의 출력 신호를 이용하여 근접장 내의 관심 영역에서 각 주파수 성분에 따라 초점 빔 형성 처리를 수행한 것으로써 3가지 주파수에 대한 빔 출력 파워를 측정한 결과이다. 이 때 각 주파수의 초기 위상은 임의로 설정하였다. 이 결과로부터 모든 경우에 대하여 가상 배열의 중심점으로부터 90° 방위의 40 m 거리에서 초점 빔이 형성되는 것을 확인할 수 있다. 또한 주파수가 높을수록 빔 폭이 좁아진 것을 볼 수 있다.
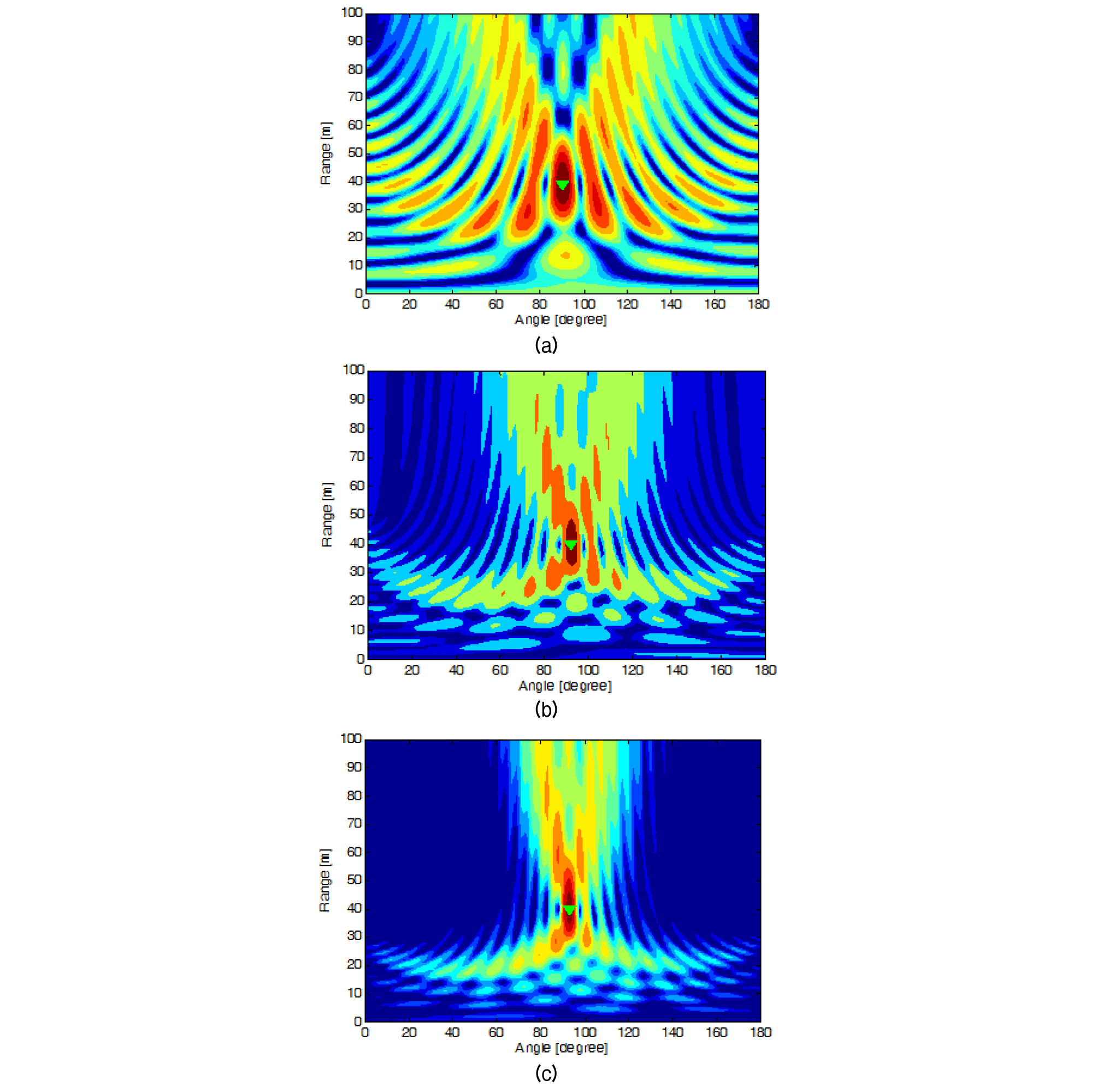
Fig. 6은 Fig. 5에서 각 빔 형성 출력 값의 최대점이 형성되는 거리에서의 출력 값들을 비교한 것이다. 신호를 설계할 때 각 주파수 성분마다의 크기를 다르게 설정한 것에 대응하여 빔 형성 출력 결과 또한 주파수 별로 신호의 세기가 각각 최고 출력 점의 크기가 0 dB, 3 dB, 1.1 dB로 원래 신호의 상대적인 비율에 맞게 출력되는 것을 확인할 수 있다. 이로부터 가상 배열을 이용한 수중 이동체의 주파수 별 소음 측정이 가능함을 알 수 있다.
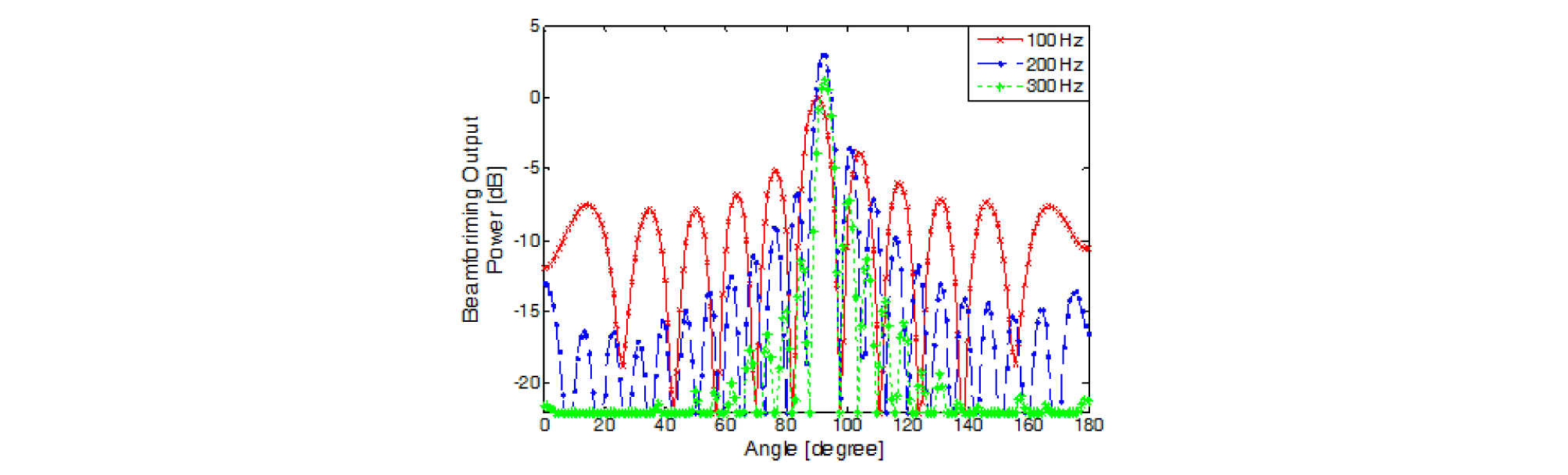
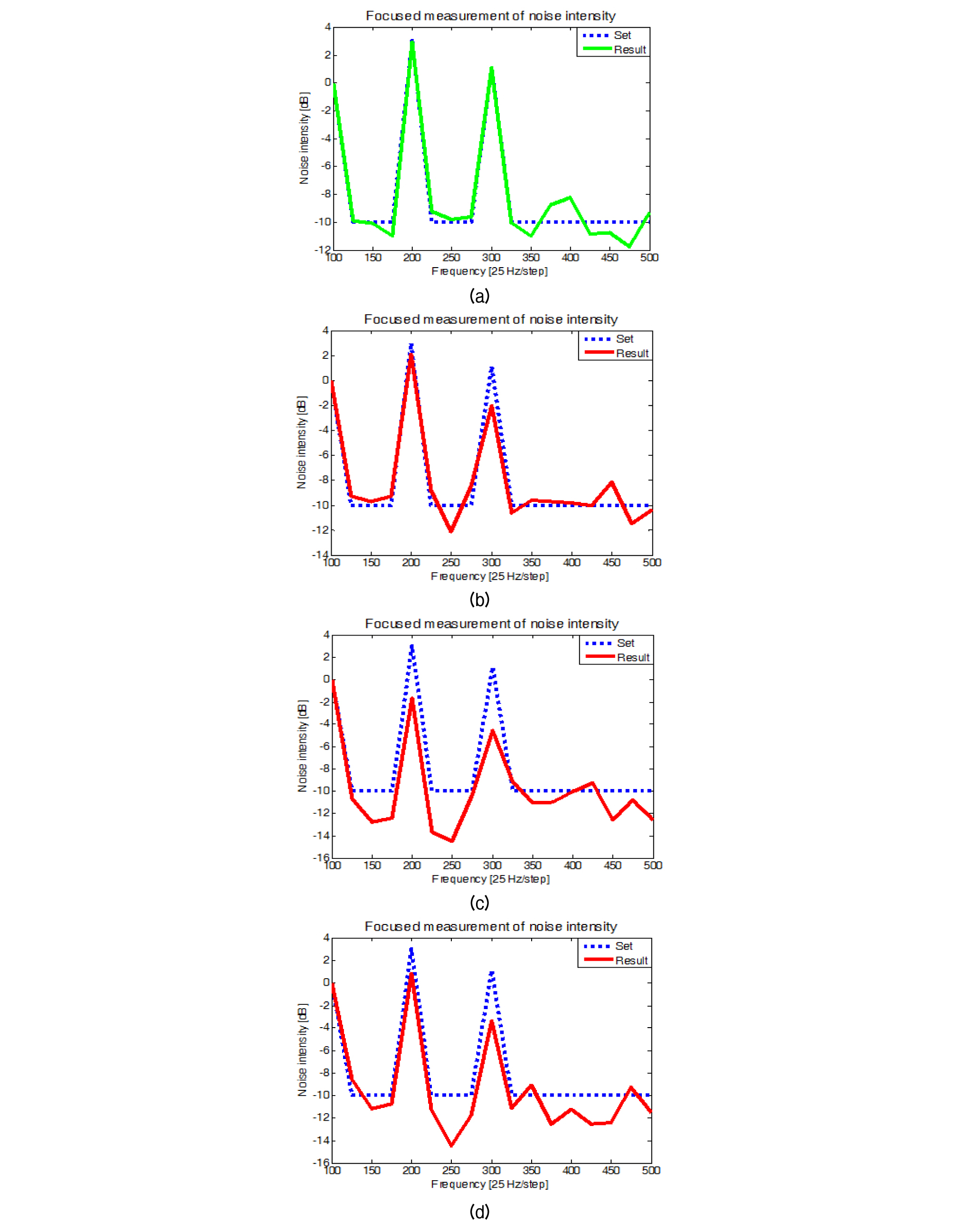
Fig. 7은 음원의 위치 정보를 이용하여 음원의 소음 세기를 나타낸 그림이다. 그림에서 ‘Set’ 표기는 모의신호를 생성할 때 설정한 스펙트럼이다. Fig. 7(a)는 위치 정보 오차가 없는 경우의 결과이고, (b)~(d)는 음원과 수신기 모두의 위치 정보에 오차가 발생한 경우이다. 각각의 오차는 순서대로 음원 위치 x좌표 오차 (5,5,-5) m, y좌표 오차 (5,-5,5) m, 수신기 위치 x좌표 오차(-5,-5,5) m, y좌표 오차 (-5,5,-5) m이다. 위치 오차가 없는 경우 제안한 방법을 이용하여 추정된 스펙트럼은 원래 설정한 스펙트럼과 비슷한 형태를 나타내는 것을 볼 수 있다. 하지만 위치 오차가 있는 경우 주파수는 찾지만 그 크기는 설정된 값과 다소 차이가 나타났으며, 특히 주파수가 높아질수록 그 영향이 증가하는 것을 볼 수 있다. 이는 높은 주파수에서는 상대적으로 위상 변화가 크기 때문에 위치 오차에 따른 시간 보정 오차가 영향을 미치기 때문으로 판단된다. 따라서 가상 센서 출력 신호를 구하기 위해서는 비교적 정교한 음원의 위치 정보를 필요로 한다.
IV. 결 론
본 논문에서는 근접장에 위치한 수중 이동체가 방사하는 소음의 세기를 주파수 별로 측정함에 있어서 물리적인 수신 배열의 제약에서 벗어나기 위해 가상 합성 배열을 이용한 수중 이동체의 소음세기 측정을 제안하였으며, 그 가능성을 검증하기 위해 모의실험을 진행하였다. 모의실험은 소음 측정이라는 목적에 따라 이동체의 이동경로와 위치, 속도 정보, 수신기의 위치 정보 등을 알고 있다는 전제하에 설계되었으며, 음원의 위치 정보 오차가 미치는 영향에 대해서도 살펴보았다. 모든 주파수의 분석에서 가상 합성 배열의 수신기 수는 같게 적용하였다.
모의실험의 결과로부터 각 주파수 별로 소음세기를 측정하였을 때, 신호를 설계할 때 설정하였던 크기의 값에 대응되게 빔 형성 출력 값의 크기에도 나타나는 것을 확인할 수 있었고, 음원과 수신기의 위치 정보가 각각 오차를 가질 때, 처음에 생성한 신호와 정확하게 일치하는 소음 크기를 추정하지는 못하지만 위치 오차가 발생하더라도 이동체가 발생하는 소음에 많은 영향을 미치는 주파수가 어느 것인지를 분석하는 영역에서는 신뢰성을 가질 수 있음을 보인다. 이러한 결과를 토대로 가상 합성 배열을 이용한 수중 이동체의 소음 측정이 원하는 주파수에 대해 가능할 것이라고 판단된다. 향후 실제 해양에서 획득한 데이터를 이용한 검증과 함께 실제 수중 이동체의 위치 정보의 정확도가 성능에 미치는 영향에 대한 분석이 필요하다.
