

I. 서 론
II. 제안된 수중표적 거리 추적 기법
2.1 기존의 TOA 기법
2.2 제안된 RBD를 이용한 ToA 기법
III. 시뮬레이션
IV. 해상실험 환경 및 결과
4.1 해상실험 환경
4.2 해상실험 결과
V. 결 론
I. 서 론
해양무기체계 연구개발 과정에 있어서 함정 수중방사소음 측정은 함정의 식별자료 획득뿐만 아니라 소음준위를 측정함으로써 함의 작전 수행시 적함으로부터 위험도 평가, 생존 기동 모드 선정 및 소음 감소를 위한 정비유지 기초자료로 활용된다.[1]
해양에서의 음파 전달은 여러 가지 요소에 의해 전달 손실이 발생하지만, 일반적으로 천해에서는 원통형 손실, 심해에서는 구형파 손실이 발생하며 거리의 함수로 근사화 하여 적용하고 있다. 그러므로 수중방사소음 측정시 소음준위를 계산하기 위해서는 거리를 필수적으로 측정하여 음파전달 손실량을 보상해 주어야 한다.[2]
일반적으로 수중에서 기동하는 표적 거리를 추적하기 위해 수동 및 능동추적 기법을 활용한다. 수동추적은 표적이 기동함으로 발생되는 미지 소음을 이용하는 기법으로 추적이 상당히 어려운 반면에, 능동추적은 알고 있는 특정 신호를 인위적으로 송신하여 추적하는 기법으로 추적이 용이하다. 대표적인 능동추적 기법으로는 단방향 ToA(Time of Arrival) 방식과 양방향 ToA 방식이 존재하며, 양방향 방식은 표적이 고속으로 기동할 경우, 표적 주위에 발생되는 유체소음에 의해 표적에 설치된 음향응답기가 음향송신기 신호를 탐지하지 못하는 경우가 많아 거리 추적이 제대로 수행되지 않는다. 따라서 본 논문에서는 음향응답기를 활용하지 않고 표적에 음향송신기만을 설치하여 거리를 추적하는 단방향 방식을 적용한다.[3]
하지만 복합 수중 채널 환경을 통과한 음파는 거리에 따른 전달 손실 및 페이딩과 도플러 효과를 동반하고 매우 빠르게 변화하는 다중경로 특성에 영향을 받는다.특히 ToA 기법 적용시 다중경로에 의한 영향은 가장 심각한 문제로 여겨지고 있다.[4] 이러한 문제를 극복하기 위해 채널 임펄스 응답(Channel Impulse Response, CIR)을 계산하는 연구가 진행되고 있다.[5,6]
CIR은 수중 채널 특성 변화 현상을 이해하는데 중요한 요소로 작용하고 이를 분석하기 위해 시역전 기법이 많이 연구 되고 있으며, Han[5] 은 특정 Pilot 신호 및 LMS(Least Mean Square) 등화기법을 이용하여 CIR을 계산하였지만 이러한 기법은 복합 수중채널의 시변동을 반영하지 못하므로 올바르지 못한 CIR을 계산하여 원신호 복원 율을 저하시키는 단점이 있다.
최근 수신기 배열단에 수신된 신호만을 이용하여 시변동하는 복합 수중 채널 CIR를 추정하고 송신 신호를 복원하는 음선기반 블라인드 디컨볼루션(Ray-based Blind Deconvolution, RBD) 기법이 국내‧외에서 이론적 연구와 실험이 이뤄지고 있다.[7,8]
본 논문에서는 시변하는 복합 수중 채널 환경에서 음선기반 블라인드 디컨볼루션 기법을 적용하여 다중경로 현상이 포함되어 있는 수신 신호로부터 송신 신호의 위상을 추정한 후 이를 수신 신호에 보상하여 CIR 추정 및 송신 신호를 복원한 후 ToA 기법을 적용함으로써 수중표적 거리 추적 성능 향상을 도모하였다. 또한, 제안된 기법을 시뮬레이션 및 해상실험 데이터에 적용함으로써 기존의 단방향 ToA 기법과 성능 비교분석 및 검증을 수행하였다.
II. 제안된 수중표적 거리 추적 기법
2.1 기존의 TOA 기법
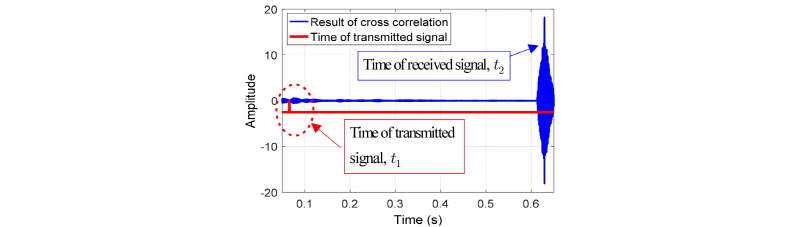
수중 표적 거리를 추정하는 기법에는 대표적으로 TDoA(Time Difference of Arrival), 단방향 또는 양방향 ToA, 도플러 편이(Doppler shift) 기법 등이 있다.[9] TDoA기법은 3차원의 정밀한 센서 배열이 필요하고 센서의 위치 및 해양 환경에 취약한 단점이[10] 있으며, 도플러 편이 기법은 표적이 수신기를 기준으로 직선 기동해야하는 단점이 있다. 하지만 Fig. 1과 같은 단방향 ToA 기법은 정확하게 동기화된 두 계측기 사이의 송/수신 신호 시간차를 통해 거리를 측정하는 기법으로 가장 간단하면서도 직관적인 방법으로 송신기에서 수신기로 신호전송 시, 전송거리는 시간에 비례한다는 특성을 이용한다. 예를 들면 송신기에서 신호를 보낸 시간이  , 수신기에서 신호를 받은 시간을
, 수신기에서 신호를 받은 시간을  라고 한다면, 두 노드 사이의 거리는 Eq. (1)과 같다.
라고 한다면, 두 노드 사이의 거리는 Eq. (1)과 같다.
 (1)
(1)
Eq. (1)에서  는 VLA(Vertical Line Array)를 포함한 수심 평균 음속이고
는 VLA(Vertical Line Array)를 포함한 수심 평균 음속이고  는
는  과 같으며,
과 같으며,  를 계산하기 위해 수신된 신호와 저장된 기준 신호간의 상호 상관관계를 이용한다.
를 계산하기 위해 수신된 신호와 저장된 기준 신호간의 상호 상관관계를 이용한다.
2.2 제안된 RBD를 이용한 ToA 기법
ToA 기법 적용시 송신된 신호가 복합 수중 채널을 통과할 경우 다중경로 및 도플러 등의 영향을 받아 기준 신호와 상호 상관관계시 Fig. 1과 달리 Fig. 2와 같이 계산된다.
여기서 Fig. 2는 다중경로의 영향으로 다수의 최대값이 확인되며, 도플러 영향으로 송신 신호의 캐리어 주파수가 변함에 따라 상호 상관관계 손실이 발생되어  를 오검출 하게 된다.[4]
를 오검출 하게 된다.[4]  검출은 최대값 탐지 기법을 사용하며, 오검출된
검출은 최대값 탐지 기법을 사용하며, 오검출된  로 인하여 표적간 거리오차 유발 및 부정확한 소음준위를 보상하게 된다. 이를 해결하기 위해 수신기배열 단에서 수신된 신호만을 이용하여 음원에서 전파된 송신 신호의 파형 및 CIR를 추정하는 RBD 기법을 적용한다.[11]
로 인하여 표적간 거리오차 유발 및 부정확한 소음준위를 보상하게 된다. 이를 해결하기 위해 수신기배열 단에서 수신된 신호만을 이용하여 음원에서 전파된 송신 신호의 파형 및 CIR를 추정하는 RBD 기법을 적용한다.[11]
제안된 RBD를 이용한 ToA 기법은 Fig. 3과 같다. 해양 도파관에서 송신 신호  가 음원으로부터 VLA로 전달된다고 할 때,
가 음원으로부터 VLA로 전달된다고 할 때,  번째 수신기에 수신되는 신호
번째 수신기에 수신되는 신호  는 송신 신호
는 송신 신호  와 CIR
와 CIR  간의 컨볼루션으로 표현할 수 있으며 푸리에 변환을 통한 주파수 영역에서의 표현은 Eq. (2)와 같다.
간의 컨볼루션으로 표현할 수 있으며 푸리에 변환을 통한 주파수 영역에서의 표현은 Eq. (2)와 같다.

 (2)
(2)
 는 음원의 위치
는 음원의 위치  로부터 수신기 배열단
로부터 수신기 배열단  번째 수신기 위치
번째 수신기 위치  에서의 주파수 응답을 나타낸다. 여기서, 송신 신호의 크기항
에서의 주파수 응답을 나타낸다. 여기서, 송신 신호의 크기항  , 위상항
, 위상항  과
과  는 알지 못한다고 가정한다.
는 알지 못한다고 가정한다.
송신 신호와 주파수 응답 CIR를 알지 못하는 조건에서, 수신된 신호  로부터 다중경로 현상을 제거하기 위해 CIR의 추정이 수행되어야 하며, 각 센서에 수신되는 신호의 세기는 일정하다는 가정 하에 Eq. (3)과 같이 수신된 신호의 정규화를 수행한다.
로부터 다중경로 현상을 제거하기 위해 CIR의 추정이 수행되어야 하며, 각 센서에 수신되는 신호의 세기는 일정하다는 가정 하에 Eq. (3)과 같이 수신된 신호의 정규화를 수행한다.
수신신호 정규화로 인해  항에서 신호의 크기항
항에서 신호의 크기항  는 제거되었으나 신호의 위상항
는 제거되었으나 신호의 위상항  가 남은 것을 확인할 수 있다. 이를 제거하기 위해 위상 보정인자
가 남은 것을 확인할 수 있다. 이를 제거하기 위해 위상 보정인자  를 Eq. (4)와 같이 도입한다.
를 Eq. (4)와 같이 도입한다.
 , (4)
, (4)
여기서 가중치 벡터  를 계산하기 위해 Sabra와 Dowling[12]이 제안한 음선 정보를 이용하여 Eq. (5)와 같이 계산한다.
를 계산하기 위해 Sabra와 Dowling[12]이 제안한 음선 정보를 이용하여 Eq. (5)와 같이 계산한다.
 (5)
(5)
Eq. (5)의  는 VLA 간격,
는 VLA 간격,  는 VLA를 포함한 수심 평균 음속,
는 VLA를 포함한 수심 평균 음속,  은 m 번째 경로에 해당하는 음선의 입사 각도를 나타낸다.
은 m 번째 경로에 해당하는 음선의 입사 각도를 나타낸다.  을 계산하기 위해 Eqs. (6), (7)과 같이 빔형성을 수행한다.
을 계산하기 위해 Eqs. (6), (7)과 같이 빔형성을 수행한다.
 (6)
(6)
 (7)
(7)
이때, 수신되는 신호의 대역폭 및 입사각은 
 이며,
이며,  이다. 그리고 m 번째 경로에서 빔형성 에너지가 가장 큰 지점이
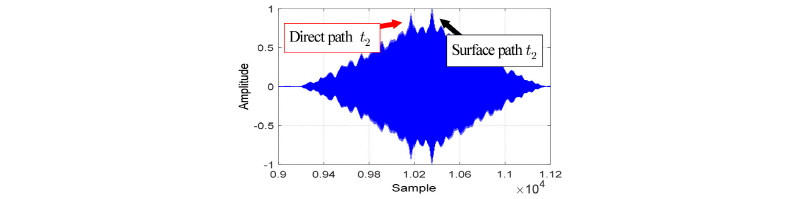
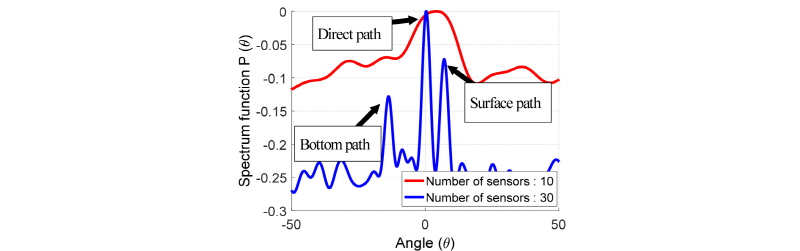
이다. 그리고 m 번째 경로에서 빔형성 에너지가 가장 큰 지점이  이다. 이를 이용하면 Fig. 4와 같이 각 경로에서 입사되는 직접파 또는 해수면 반사파의 방위 및 크기를 파악할 수 있다.
이다. 이를 이용하면 Fig. 4와 같이 각 경로에서 입사되는 직접파 또는 해수면 반사파의 방위 및 크기를 파악할 수 있다.
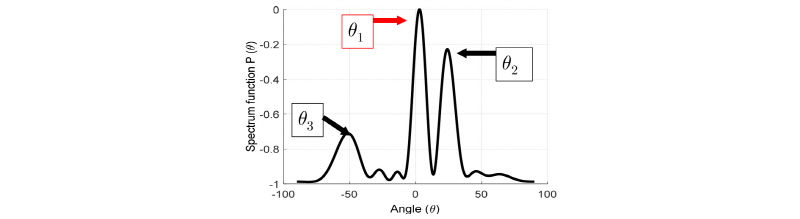
Fig. 4의  은 직접파,
은 직접파,  는 해수면 반사파,
는 해수면 반사파,  는 해저면 반사파를 뜻하며, 직접파 입사각
는 해저면 반사파를 뜻하며, 직접파 입사각  을 가중치 벡터
을 가중치 벡터  에 대입하여 위상보정인자
에 대입하여 위상보정인자  를 Eq. (8)과 같이 계산한다. 여기서 임의의 위상편이
를 Eq. (8)과 같이 계산한다. 여기서 임의의 위상편이  항은 송수신기 사이에 전송된 음파의 음선이동시간에 의존하게 된다. 그리고 Eq. (3)의 추정된
항은 송수신기 사이에 전송된 음파의 음선이동시간에 의존하게 된다. 그리고 Eq. (3)의 추정된  항에 남아있는 신호의 위상항
항에 남아있는 신호의 위상항  를 제거해주기 위해 Eq. (8)에서 계산된 위상보정 인자를 Eq. (9)에 대입하여 연산한다.
를 제거해주기 위해 Eq. (8)에서 계산된 위상보정 인자를 Eq. (9)에 대입하여 연산한다.
 (8)
(8)
 , (9)
, (9)
여기서  는 추정된 CIR를 나타내며, 수신 신호의 다중경로 영향을 제거하고 송신 신호의 파형을 복원하기 위해 Eq. (10)과 같이 연산한다.
는 추정된 CIR를 나타내며, 수신 신호의 다중경로 영향을 제거하고 송신 신호의 파형을 복원하기 위해 Eq. (10)과 같이 연산한다.
 (10)
(10)
Eq. (10)에서 *는 공액복소수 연산자이고  는 수신신호
는 수신신호  에 다중경로 영향을 제거한 송신 신호의 스펙트럼이다. 그리고 도플러 현상 제거를 위해 모호 함수[13]를 기반으로 송신 신호의 도플러 특성에 따른 상관관계 손실을 파악한 후 함속 대비 발생하는 최대 및 최소 도플러에 맞춰 다수의 replica 신호를 생성 및 저장한다. 최종적으로 표적 거리
에 다중경로 영향을 제거한 송신 신호의 스펙트럼이다. 그리고 도플러 현상 제거를 위해 모호 함수[13]를 기반으로 송신 신호의 도플러 특성에 따른 상관관계 손실을 파악한 후 함속 대비 발생하는 최대 및 최소 도플러에 맞춰 다수의 replica 신호를 생성 및 저장한다. 최종적으로 표적 거리  를 계산하기 위해 복원된 송신 신호
를 계산하기 위해 복원된 송신 신호  와 저장된 replica 신호들 간의 상호 상관관계를 통하여 시간지연
와 저장된 replica 신호들 간의 상호 상관관계를 통하여 시간지연  를 계산한 후 Eq. (1)에 대입한다.
를 계산한 후 Eq. (1)에 대입한다.
III. 시뮬레이션
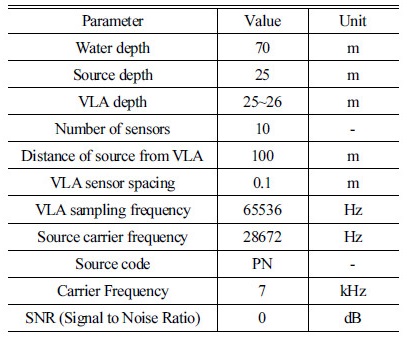
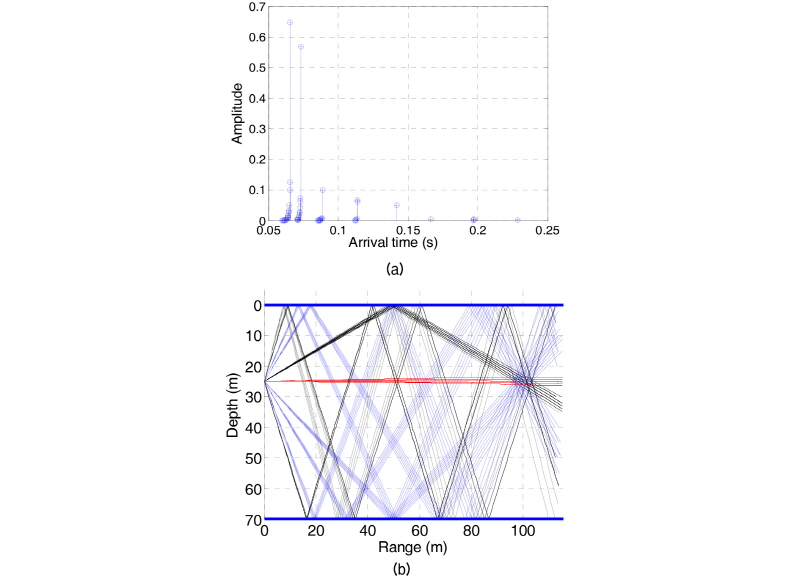
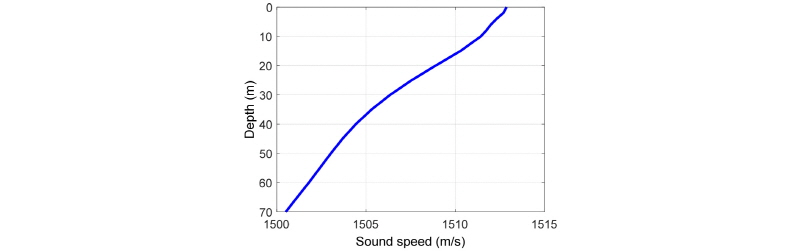
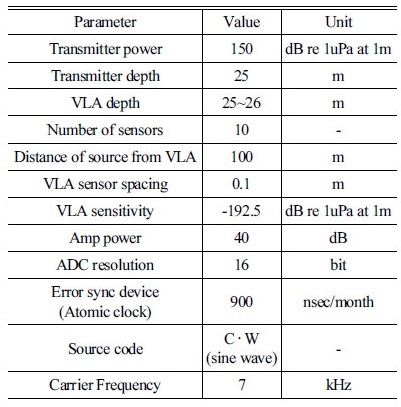
제안된 기법의 성능을 확인하기 위해 실제 해상에서 측정된 음속 분포를 이용하여 공개된 벨합(Bellhop) 시뮬레이터로 모의 수중 채널을 생성하고 모의실험을 수행하였다.[14] Table 1과 같은 조건에서 표적간 거리가 100 m 지점에서의 모의 수중 채널은 Fig. 5와 같으며, 이때 사용된 음속 분포는 Fig. 6과 같다.
위와 같은 복합 수중 채널 환경에서 빔형성한 결과는 Fig. 7과 같으며, 기존의 기법 및 제안된 기법으로 상호 상관관계 결과는 Fig. 8과 같다.
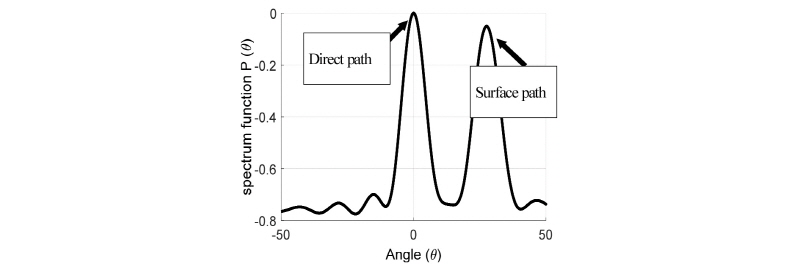
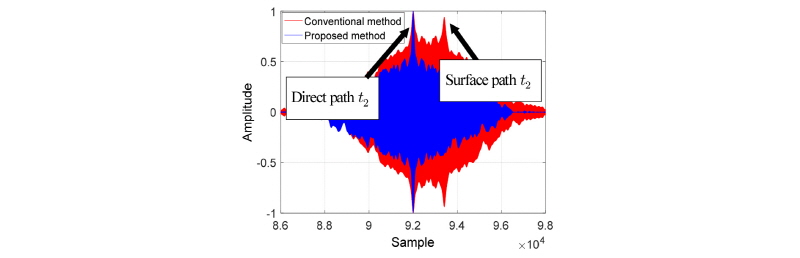
Fig. 8에서 기존의 기법으로 수신 신호와 기준 신호간의 상호 상관관계를 계산하면 다중경로 영향으로 인하여 다수의 최대값이 발생하고 도플러 등의 영향으로 직접파의 상호 상관관계 성능이 저하되는 것을 확인할 수 있다. 제안된 기법을 적용하면, 도플러 및 해수면 반사파에 의한 영향이 제거되어 기존의 기법보다 향상된 상관관계 결과를 확인할 수 있다.
Fig. 8에서 계산된 두가지 경우에 대한 시간지연  데이터를 Eq. (1)에 대입하여 수중표적 거리를 추적하면, Figs. 9,10과 같다. 여기서, Fig 9는 해수면 반사파의 영향으로 인해 시간지연
데이터를 Eq. (1)에 대입하여 수중표적 거리를 추적하면, Figs. 9,10과 같다. 여기서, Fig 9는 해수면 반사파의 영향으로 인해 시간지연  값을 오검출 하여 실제 거리 기준 11 m 정도의 오차가 지속적으로 발생하는 것을 확인할 수 있다. 하지만 제안된 기법을 이용하여 수중표적 거리를 추적하면 Fig. 10과 같이 실제 거리 기준 1 m이내의 오차를 확인할 수 있다.
값을 오검출 하여 실제 거리 기준 11 m 정도의 오차가 지속적으로 발생하는 것을 확인할 수 있다. 하지만 제안된 기법을 이용하여 수중표적 거리를 추적하면 Fig. 10과 같이 실제 거리 기준 1 m이내의 오차를 확인할 수 있다.
제안된 기법 적용시 주의할 점은 멀리 떨어진 표적에 대한 빔형성을 적은 개수의 센서로 시도할 경우 Fig. 11과 같이 낮은 빔 해상도로 인하여 직접파 및 해수면 반사파를 구분할 수 없게 되며, CIR 추정시 오차를 유발한다. 이때는 불가피하게 센서 개수를 증가시키거나 직접파 경로를 예측해야 될 것이다.
IV. 해상실험 환경 및 결과
4.1 해상실험 환경
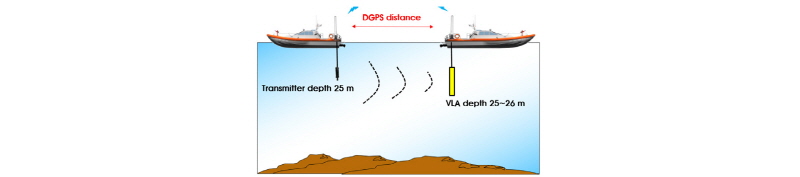
본 실험은 남해 남형제도에서 근방에서 수행하였고 시험환경은 수심 70 m, 풍속 2.5 m/s, 파고 1 m이하였으며, 수중 음속은 Fig. 6과 같다.
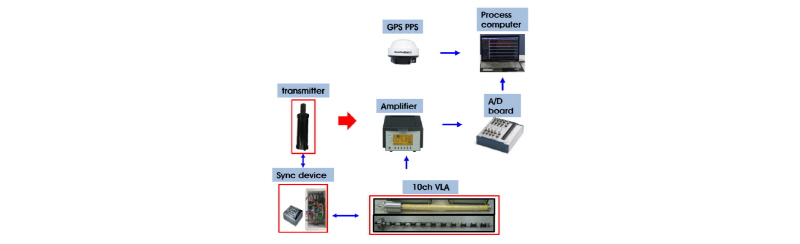
해상 실험시 송‧수신기의 거리는 약 100 m로 Fig. 12와 같이 두 대의 보트에 Fig. 13, Table 2와 같은 장비를 선적한 후 멀어지면서 실험을 하였다. 이때, 보트 위치정보는 송‧수신 설치 지점 위에 DGPS(Differential Global Positioning System) 및 RF 안테나를 설치하여 기록하였다.
4.2 해상실험 결과
본 절에서는 Fig. 12과 같은 환경에서 해상실험을 수행한 후 DGPS거리산출 결과를 기준으로 제안된 RBD 기반 ToA 기법의 수중 표적거리 추적 정확도 성능을 확인하고자 한다. 여기서, VLA에 수신된 신호는 Fig. 14와 같다.
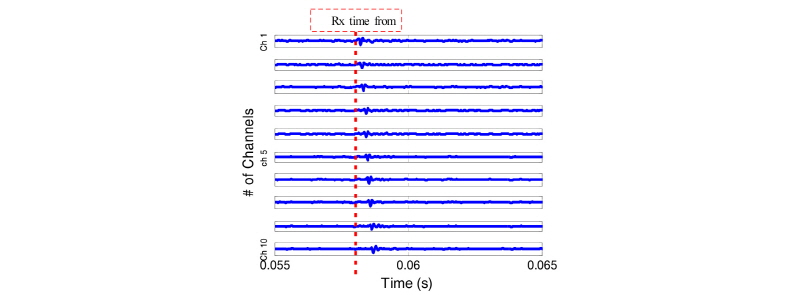
Fig. 14 신호를 Eqs. (6), (7)과 같이 빔형성 하여  을 계산하고 Eq. (8)에 대입하여 위해 위상 보정인자
을 계산하고 Eq. (8)에 대입하여 위해 위상 보정인자  추청 할 수 있으며, 이 값을 Eq. (9)에 대입하면 각 채널의 CIR를 계산할 수 있다. 여기서 Fig. 15는 1번 채널의 추정된 CIR을 나타낸다.
추청 할 수 있으며, 이 값을 Eq. (9)에 대입하면 각 채널의 CIR를 계산할 수 있다. 여기서 Fig. 15는 1번 채널의 추정된 CIR을 나타낸다.
계산된 CIR를 Eq. (10)에 적용하면 Fig. 16과 같이 복합 수중 채널의 영향이 제거된 신호를 추정할 수 있으며 이 신호들의 합은 복원 신호가 된다.
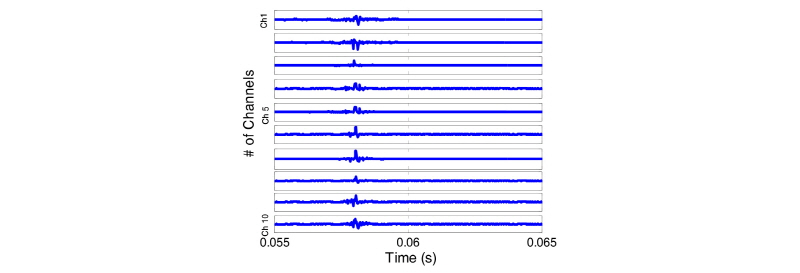
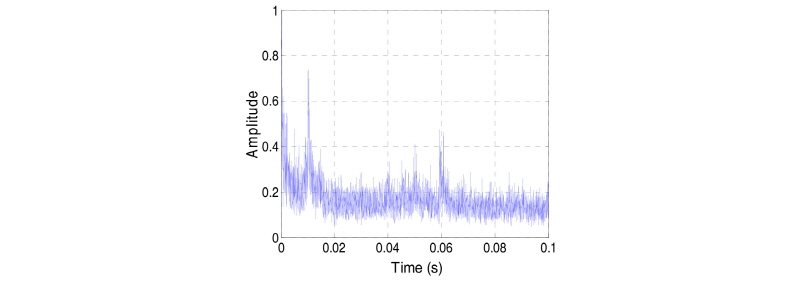
기준 신호와 복원 되지 않은 Fig. 14 신호 및 복원된 Fig. 16 신호의 상호 상관관계 결과는 Fig. 17과 같다. 여기서, Fig. 17 (a)는 수신 신호가 복합 수중 채널의 영향을 받아 기준 신호와의 상호 상관관계 성능이 저하되어 신호를 수신한 시간  를 오검출 한다. 하지만 제안된 기법을 적용한 Fig. 17 (b)는 복합 수중 채널의 영향을 제거하여 상대적으로 정확한 상호 상관관계 결과를 나타내며, 올바른
를 오검출 한다. 하지만 제안된 기법을 적용한 Fig. 17 (b)는 복합 수중 채널의 영향을 제거하여 상대적으로 정확한 상호 상관관계 결과를 나타내며, 올바른  를 검출 하였다. 위에서 계산된
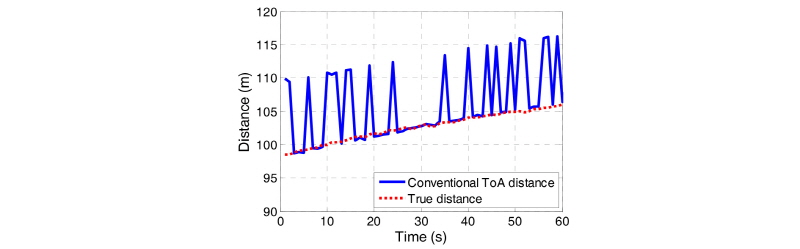
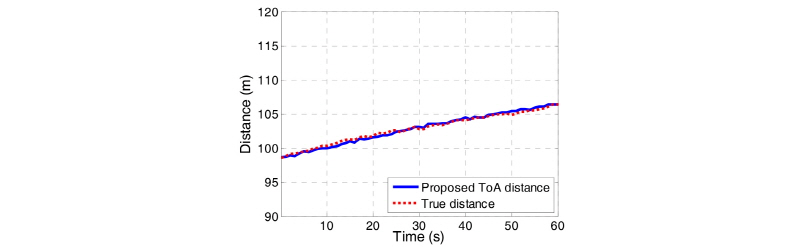
를 검출 하였다. 위에서 계산된  값을 Eq. (1)에 대입하여 ToA를 계산하고 DGPS 데이터와 비교한 결과를 Fig. 18에 나타내었다.
값을 Eq. (1)에 대입하여 ToA를 계산하고 DGPS 데이터와 비교한 결과를 Fig. 18에 나타내었다.
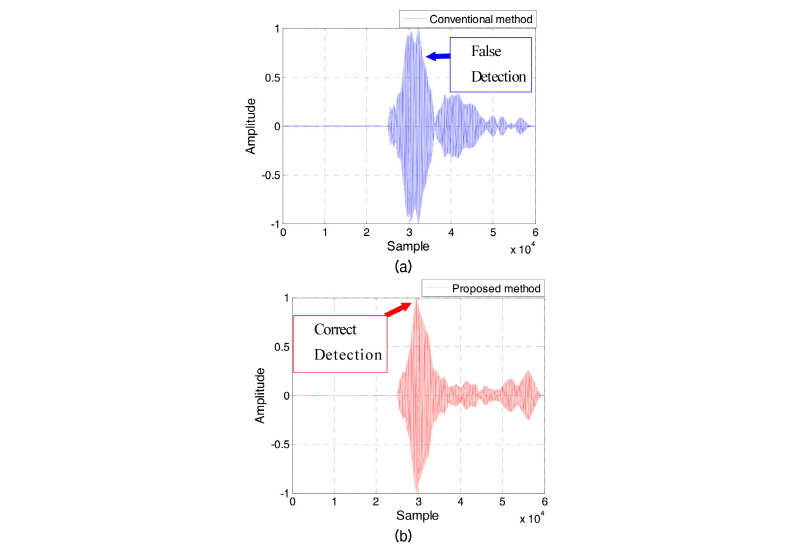
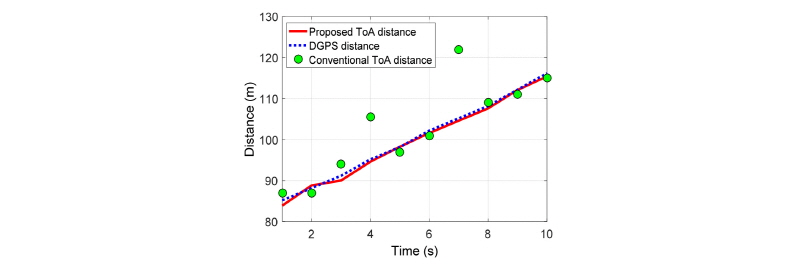
Fig. 18는 10초간의 데이터 값으로 기존의 ToA 기법은 DGPS 거리 대비 1 m ~ 16 m 오차가 지속적으로 발생하였으나 제안된 RBD를 이용한 ToA 기법은 DGPS 거리 대비 0 m ~ 1 m 오차를 유지하였다.
V. 결 론
본 논문에서는 음파의 지연 확산이 있는 복합 수중 환경에서 단방향 ToA 표적 거리 추적 기법 성능향상을 위해 RBD 기법을 적용하여 CIR를 추정하고 다중경로 현상이 제거된 송신 신호를 복원함으로써 거리 추정 오차를 최소화 하는 연구를 수행하였다.
제안된 기법 적용 가능성 파악하기 위해 해양 환경채널 모델 프로그램인 Bellop을 이용한 모의실험을 수행하였고 모의실험 결과 기존의 기법을 적용할 경우 실제 거리 기준 11 m 정도의 오차가 지속적으로 발생하지만 제안된 기법을 적용하면 다중경로에 대한 영향을 최소화하여 실제 거리 기준 1 m이내의 오차를 확인할 수 있다.
남해 남형제도에서 수행된 실제 해상실험에서도 제안된 표적 거리 추정 기법이 기존의 기법보다 향상된 성능을 보였으며, 기존의 기법은 DGPS 거리 대비 1 m ~ 16 m 오차를 나타내는 반면, 제안된 기법은 DGPS 거리 대비 0 m ~ 1 m 오차를 유지하였다. 본 연구를 통해 수중 표적 거리 추정 시 성능 향상을 위해 RBD 기법 적용 및 활용 가능성을 제시하였다.
