

 I. 서 론
I. 서 론
널리 알려진 NLMS(Normalized Least Mean Square) 알고리즘은 연산 복잡도가 낮고, 많은 응용에서 안정적으로 동작한다는 장점이 있다. 그럼에도 불구하고 입력 신호의 고유치 분포가 클 경우, 수렴 속도가 저하되는 단점이 있다.[1-2] 이러한 단점을 해결하기 위해 여러 적응 알고리즘들이 제안되었으며, 제안된 알고리즘들의 대부분은 입력 신호를 백색화(whitening)하여 고유치 분포를 낮추는 아이디어에 그 근간을 두고 있다. 대표적인 방식인 Transform- domain 적응 필터는 변환을 통하여 입력 신호의 상관도를 낮춘다.[3] 또 다른 방식인 부밴드 적응 필터(Subband Adaptive Filter, SAF)의 경우는 전밴드를 여러 개의 부밴드로 나눔으로써 특정 밴드를 통과한 신호의 고유치 분포가 전밴드 신호의 고유치 분포보다 작다는 사실에 근거하여 수렴 속도를 개선한다.[4-5] 그러나 기존의 부밴드 적응 필터는 소위 “band-edge effect”로 인하여 수렴 속도를 향상시키는데 한계가 있었다.[5] 이러한 band-edge effect 문제를 해결하기 위하여 minimum disturbance 원리에 기반한 정규 부밴드 적응 필터(Normalized SAF, NSAF)가 제안되었다.[6]
한편, 가변 스텝 사이즈를 가지는 적응 필터는 수렴 초기에 큰 스텝 사이즈를 이용하여 수렴 속도를 향상시키고 수렴 후에는 스텝 사이즈를 줄임으로써 수렴 후 성능을 개선하기 위한 목적으로 제안되어 여러 방식의 적응 필터에 적용된 바 있다. 대표적인 알고리즘인 Kwong의 알고리즘은 수렴이 진행되면서 수렴 후 오차 신호가 점차 줄어든다는 사실을 이용한 가변 스텝 사이즈 알고리즘이다.[7] 구현이 간단하고 가산 잡음이 적은 환경에서 좋은 수렴 성능을 보이지만, 가산 잡음에 민감하여 가산 잡음이 클 경우 급속히 성능이 저하되는 단점이 있다.
최근, 기존의 NSAF에 가변 스텝 사이즈 알고리즘을 적용하여 성능을 개선한 가변 스텝 사이즈 NSAF들이 제안된 바 있다.[8-9] Ni와 Li[8]는 Benesty[10]의 NVSS-NLMS 알고리즘을 NSAF에 적용하였다. 이 과정에서 각 밴드 별 스텝 사이즈를 별도로 설정하기 위하여 행렬 형태의 가변 스텝 사이즈를 이용하였다. Shin 등[9]은 평균 자승 변이(Mean Square Deviation, MSD) 분석에 근거한 가변 스텝 사이즈 NSAF를 제안하였다. Ni와 Li[8]보다 향상된 수렴 성능을 보이지만 Ni와 Li[8]보다 많은 연산량을 요구한다. 한편, Ni와 Li[8]과 Shin 등[9]이 제안한 가변 스텝 사이즈 NSAF들은 모두 가산 잡음의 분산 또는 표준 편차를 반영하여 가산 잡음의 영향을 최소화하고 있다.
본 논문에서는 가변 스텝 사이즈 LMS 알고리즘을 위해 제안되었던 Kwong의 알고리즘의 문제점을 개선한 가변 스텝 사이즈 NSAF를 제안하였다. 앞에서 언급한 바와 같이 단순히 Kwong의 알고리즘을 NSAF에 적용할 경우, 각 밴드 별 가산 잡음의 영향을 받아 그 성능이 저하되게 된다. 결국, 가산 잡음이 많은 밴드가 수렴 성능을 결정하게 된다. 이를 개선하기 위하여 각 밴드 별 가산 잡음을 차감한 정규 오차 신호를 사용함으로써, 가산 잡음의 영향을 배제하였다. 이를 통해 가산 잡음이 변하는 비정상 환경에서 우수한 성능을 보이는 가변 스텝 사이즈 NSAF를 제안하였다.
본 논문의 구성은 다음과 같다. 서론에 이어 II장에서 본 논문의 배경이 되는 NSAF와 Kwong의 가변 스텝 사이즈 알고리즘에 대하여 살펴보고, III장에서는 가산 잡음이 차감된 정규 오차 신호에 근거한 가변 스텝 사이즈 NSAF를 제안한다. IV장에서는 제안된 알고리즘의 성능을 확인하기 위하여 컴퓨터 모의 실험을 수행하였다. 정상 및 비정상 환경 하에서 타 알고리즘과의 비교를 통해 제안된 알고리즘의 향상된 성능을 검증하였다. 마지막으로 V장에서 결론을 맺는다.
II. NSAF 및 Kwong의 가변 스텝 사이즈 알고리즘
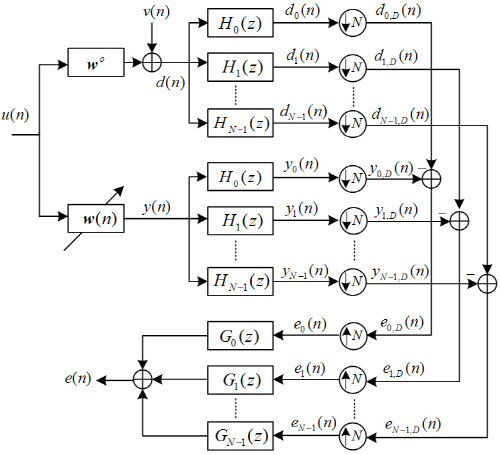
Fig. 1은 시스템 식별(System Identification)을 위한 NSAF의 구조를 보여준다. Fig. 1에서 N은 부밴드의 수이다.  와
와  은 각각 입력 신호
은 각각 입력 신호  이 시스템
이 시스템  와 적응 필터
와 적응 필터  을 거친 후의 출력이다. 이어서
을 거친 후의 출력이다. 이어서  와
와  은 분석 필터
은 분석 필터 
 에 의해 각각 부밴드 신호로 분리된다.
에 의해 각각 부밴드 신호로 분리된다.  와
와  는 i번째 부밴드 필터를 통과한 부밴드 신호들이다. 전밴드 신호 대비 N배로 대역폭이 줄어든 부밴드 신호들은 연산량을 감소시키기 위해 N배로 데시메이션된다.
는 i번째 부밴드 필터를 통과한 부밴드 신호들이다. 전밴드 신호 대비 N배로 대역폭이 줄어든 부밴드 신호들은 연산량을 감소시키기 위해 N배로 데시메이션된다.  와
와  는 각각 데시메이션된 신호들이다.
는 각각 데시메이션된 신호들이다.  은 가산 잡음이다. NSAF의 적응 필터 갱신 알고리즘은 다음과 같이 주어진다.[6]
은 가산 잡음이다. NSAF의 적응 필터 갱신 알고리즘은 다음과 같이 주어진다.[6]
 ,
,여기서,  은 적응필터 계수 벡터,
은 적응필터 계수 벡터,  은 i번째 부밴드의 적응 필터 오차 신호이며,
은 i번째 부밴드의 적응 필터 오차 신호이며, 
 은 i번째 부밴드를 위한 입력 벡터이다.
은 i번째 부밴드를 위한 입력 벡터이다.
원래 Kwong의 가변 스텝 사이즈 알고리즘은 LMS 알고리즘에 적용되었다. 다음은 Kwong의 가변 스텝 사이즈 LMS 알고리즘이다.[7]
 ,
,
 .
.단,  은
은  로 제한된다. 여기서
로 제한된다. 여기서  은 적응 필터의 오차 신호이고
은 적응 필터의 오차 신호이고  은 입력 벡터이다.
은 입력 벡터이다.  은
은  가 1보다 작기 때문에 iteration이 증가할수록 작아진다. 또한,
가 1보다 작기 때문에 iteration이 증가할수록 작아진다. 또한,  이 최적 계수에 다가갈수록
이 최적 계수에 다가갈수록  가 작아져서 역시
가 작아져서 역시  이 작아진다. 그러나 상태가 변화하는 비정상적인 상황에서 적응 필터 계수가 최적 계수에서 벗어날 경우, 적응 오차가 커지게 되고 결국 식(2b)의 두 번째 항은
이 작아진다. 그러나 상태가 변화하는 비정상적인 상황에서 적응 필터 계수가 최적 계수에서 벗어날 경우, 적응 오차가 커지게 되고 결국 식(2b)의 두 번째 항은  을 증가시키는 방향으로 작용한다. 즉, Kwong의 알고리즘에서는
을 증가시키는 방향으로 작용한다. 즉, Kwong의 알고리즘에서는  를 적응 필터 계수가 최적 계수에 얼마나 다가갔는가 하는 지표로 사용한다. 그러나
를 적응 필터 계수가 최적 계수에 얼마나 다가갔는가 하는 지표로 사용한다. 그러나  에는 근본적으로 가산 잡음이 포함되어 있기 때문에 가산 잡음이 큰 환경에서는
에는 근본적으로 가산 잡음이 포함되어 있기 때문에 가산 잡음이 큰 환경에서는  이 줄어드는데 한계가 있으며, 결국 적응 필터 계수가 최적 계수에 얼마나 다가갔는가 하는 지표로서의 역할을 제대로 수행할 수 없게 된다.
이 줄어드는데 한계가 있으며, 결국 적응 필터 계수가 최적 계수에 얼마나 다가갔는가 하는 지표로서의 역할을 제대로 수행할 수 없게 된다.
III.제안된 가변 스텝 사이즈를 이용한 NSAF
Kwong의 가변 스텝 사이즈 알고리즘은 NSAF에도 그대로 적용할 수 있다. 다만, 각 부밴드 별로 해당 부밴드의 적응 오차  을 이용해야하므로 부밴드 별로 가변 스텝 사이즈의 수렴인자를 가져야 한다. 따라서 Kwong의 가변 스텝 사이즈 알고리즘을 적용한 NSAF는 다음과 같다.
을 이용해야하므로 부밴드 별로 가변 스텝 사이즈의 수렴인자를 가져야 한다. 따라서 Kwong의 가변 스텝 사이즈 알고리즘을 적용한 NSAF는 다음과 같다.
 ,
,
 .
.식(3)은 행렬을 이용하여 표현하면 다음과 같이 쓸 수 있다.
 .
.여기서
 .
. 은 대각 성분이 각 부밴드 별 가변 스텝 사이즈의 수렴 인자를 가지는
은 대각 성분이 각 부밴드 별 가변 스텝 사이즈의 수렴 인자를 가지는  차원의 대각 행렬이다. 여기서도 (3b)의
차원의 대각 행렬이다. 여기서도 (3b)의  에 포함된 가산 잡음
에 포함된 가산 잡음  에서 기인하는 부밴드 별 가산 잡음으로 인하여 수렴 성능의 저하가 발생하게 된다.
에서 기인하는 부밴드 별 가산 잡음으로 인하여 수렴 성능의 저하가 발생하게 된다.
식(3)의 가변 스텝 사이즈를 이용한 NSAF에서 가산 잡음으로 인한 성능 저하 문제를 개선하기 위하여 각 부밴드 별 가산 잡음의 분산을 차감한 후 가산 잡음의 분산으로 정규화된 오차 신호에 기반한 가변 스텝 사이즈를 이용한 NSAF를 제안한다. 식(6)은 제안된 가변 스텝 사이즈 알고리즘이다.


 .
.단,  은
은  으로 제한된다. 가산 잡음과 적응 오차가 비상관적(uncorrelated)이라고 가정하는 것은 무리가 없으므로,
으로 제한된다. 가산 잡음과 적응 오차가 비상관적(uncorrelated)이라고 가정하는 것은 무리가 없으므로,  은 순수 적응 오차의 분산이라고 할 수 있다. 따라서 앞에서 언급한 적응 필터 계수가 최적 계수에 얼마나 다가갔는가 하는 지표로 사용할 수 있을 것이다. 그러나
은 순수 적응 오차의 분산이라고 할 수 있다. 따라서 앞에서 언급한 적응 필터 계수가 최적 계수에 얼마나 다가갔는가 하는 지표로 사용할 수 있을 것이다. 그러나  과
과  모두 추정치이며, 가산 잡음은 제어 불가능한 외부 요인이므로 가산 잡음의 절대값에 의존하지 않도록 가산잡음의 분산 대비 추정된 순수 적응 오차의 분산을 지표로 사용하는 것이 합리적이다.
모두 추정치이며, 가산 잡음은 제어 불가능한 외부 요인이므로 가산 잡음의 절대값에 의존하지 않도록 가산잡음의 분산 대비 추정된 순수 적응 오차의 분산을 지표로 사용하는 것이 합리적이다.
식(6)에서는 식(3b)에서처럼  을 그대로 사용하지 않고 식(7)과 같이 망각인자를 가지는 시간 평균을 이용하였다.
을 그대로 사용하지 않고 식(7)과 같이 망각인자를 가지는 시간 평균을 이용하였다.
 .
.식(6)에서  와
와  는 경험적으로 설정된다.[7] 통상
는 경험적으로 설정된다.[7] 통상  는 0.99 이상의 값이 사용되며,
는 0.99 이상의 값이 사용되며,  는 0에 가까운 값이 사용된다.
는 0에 가까운 값이 사용된다.  값이 적절한 값보다 작으면
값이 적절한 값보다 작으면  이 너무 빨리 작아져서 어느 순간부터 수렴이 매우 느려지는 현상이 나타나게 된다. 한편, 작은
이 너무 빨리 작아져서 어느 순간부터 수렴이 매우 느려지는 현상이 나타나게 된다. 한편, 작은  은 수렴 후 성능에 도움이 되나 적절한 값보다 작으면, 비정상 상태에서 적응성이 나빠지게 된다.
은 수렴 후 성능에 도움이 되나 적절한 값보다 작으면, 비정상 상태에서 적응성이 나빠지게 된다.
식(6)은  을 필요로 하는데, 이는 응용에 따라서는 비교적 용이하게 추정할 수 있다. 많은 경우, 신호가 존재하지 않는 구간은 가산 잡음만 존재한다고 가정할 수 있으므로, 신호가 존재하지 않는 구간에서
을 필요로 하는데, 이는 응용에 따라서는 비교적 용이하게 추정할 수 있다. 많은 경우, 신호가 존재하지 않는 구간은 가산 잡음만 존재한다고 가정할 수 있으므로, 신호가 존재하지 않는 구간에서  를 추정한다. 한편, 신호의 유무를 판별하기가 쉽지 않거나 신호가 항상 존재하는 경우는 Ni와 Li[8]이 제안한 식(8)의 방법을 적용할 수 있다.
를 추정한다. 한편, 신호의 유무를 판별하기가 쉽지 않거나 신호가 항상 존재하는 경우는 Ni와 Li[8]이 제안한 식(8)의 방법을 적용할 수 있다.
 ,
, ,
, .
.식(8b)와 식(8c)에서  는 망각인자이다.
는 망각인자이다.
한편, nonparametric 가변 스텝 사이즈 알고리즘에 기반하여 제안된 방법[8]은 식(9)과 같은 가변 스텝 사이즈 알고리즘을 사용한다.
 .
.식(6)와 식(9)를 비교하면, 외형적으로는 식(9)는 분산 대신 표준편차의 추정치를 사용하며, 식(6)과 같이  나
나  와 같은 파라메터에 의존하지는 않는다. 식(6)과 식(9)에서
와 같은 파라메터에 의존하지는 않는다. 식(6)과 식(9)에서  과
과  의 증감에 따라
의 증감에 따라  이 같은 방향으로 증감한다는 점에서는 유사하나, 식(9)는
이 같은 방향으로 증감한다는 점에서는 유사하나, 식(9)는  의 정규화에는 기반을 두고 있지 않다는 점에서 차이가 있다. 이점은 Ni와 Li[8]의 알고리즘이
의 정규화에는 기반을 두고 있지 않다는 점에서 차이가 있다. 이점은 Ni와 Li[8]의 알고리즘이  의 절대량에 민감할 수 있다는 것을 의미한다. 한편, 제안된 알고리즘은 결과적으로 오차의 증가가 없을 때, 스텝 사이즈가 연속적으로 줄어 들 수 있다는 점에서 Ni와 Li[8]과 차이를 보인다. 이에 대하여는 4장에서 실험을 통해 두 알고리즘의 특성적 차이를 보일 것이다.
의 절대량에 민감할 수 있다는 것을 의미한다. 한편, 제안된 알고리즘은 결과적으로 오차의 증가가 없을 때, 스텝 사이즈가 연속적으로 줄어 들 수 있다는 점에서 Ni와 Li[8]과 차이를 보인다. 이에 대하여는 4장에서 실험을 통해 두 알고리즘의 특성적 차이를 보일 것이다.
IV. 실험 및 결과 고찰
제안된 가변 스텝 사이즈 NSAF의 수렴 속도, 정상 상태 오차 그리고 비정상 신호에 대한 수렴 특성을 평가하기 위하여 Fig. 1에 나와 있는 시스템 식별 환경에서 컴퓨터 모의 실험을 실시하였다. 실험 환경은 Lee 등[11]에서 제시한 것과 동일하게 설정하였다. 미지의 시스템을 위해 Fig. 2와 같은 1024차의 room impulse response를 사용하였다.
평균 0의 백색 잡음을 1차 시스템  또는 이차 시스템
또는 이차 시스템  을 통과 시킨 후 얻어진 출력을 적응 필터 및 미지의 시스템의 입력 신호
을 통과 시킨 후 얻어진 출력을 적응 필터 및 미지의 시스템의 입력 신호  으로 사용하였다.(이후, 각각을 AR(1) 입력, AR(2) 입력이라고 함) 기본적으로
으로 사용하였다.(이후, 각각을 AR(1) 입력, AR(2) 입력이라고 함) 기본적으로  을 사용하여 실험을 하였으며
을 사용하여 실험을 하였으며  는 입력의 고유치 분포가 큰 경우의 특성을 알아보기 위해 사용하였다. 입력 신호
는 입력의 고유치 분포가 큰 경우의 특성을 알아보기 위해 사용하였다. 입력 신호  의 부밴드 분석 및 오차 신호
의 부밴드 분석 및 오차 신호  의 합성을 위하여 밴드 수 N=8의 pseudo-QMF cosine modulated 필터 뱅크를 사용하였다. 각 뱅크의 필터 탭수 L은 60 db의 차단대역 감쇄를 얻기 위해 L=64로 설정하였다. 한편, 측정 오차에서 기인하는 가산 잡음을 위해 미지의 시스템을 통과한 신호에 백색 잡음
의 합성을 위하여 밴드 수 N=8의 pseudo-QMF cosine modulated 필터 뱅크를 사용하였다. 각 뱅크의 필터 탭수 L은 60 db의 차단대역 감쇄를 얻기 위해 L=64로 설정하였다. 한편, 측정 오차에서 기인하는 가산 잡음을 위해 미지의 시스템을 통과한 신호에 백색 잡음  을 가산하였다. 모의 실험 결과는
을 가산하였다. 모의 실험 결과는  을 구하여 도시한 것이다.
을 구하여 도시한 것이다.
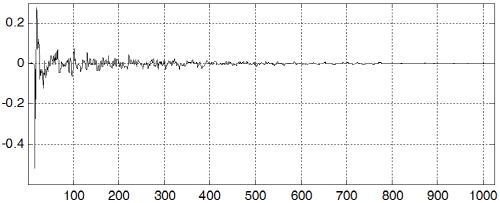
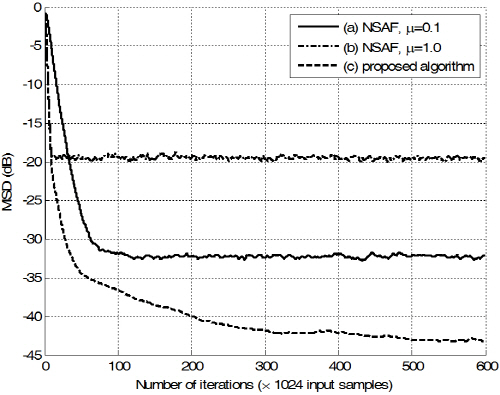
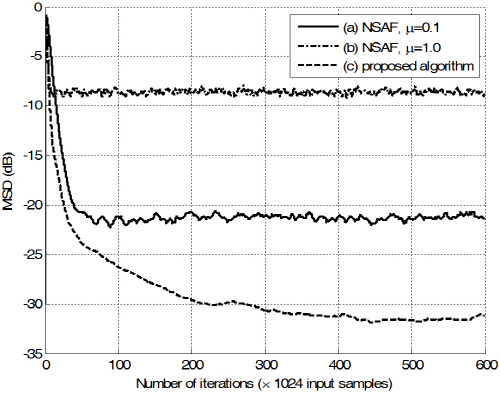
Fig. 3과 Fig. 4는 제안된 알고리즘의 수렴 특성을 보여준다. Fig. 3은 AR(1) 입력을, Fig. 4는 AR(2) 입력을 사용한 경우이다. 모든 시뮬레이션에서  ,
,  로 설정하여 사용하였다. 두 종류의 입력에 대하여 제안된 알고리즘이 기존의 고정 스텝 사이즈 NSAF보다 수렴 속도 및 수렴 후 특성에서 월등히 우수한 성능을 보임을 알 수 있다.
로 설정하여 사용하였다. 두 종류의 입력에 대하여 제안된 알고리즘이 기존의 고정 스텝 사이즈 NSAF보다 수렴 속도 및 수렴 후 특성에서 월등히 우수한 성능을 보임을 알 수 있다.
Fig. 5와 Fig. 6은 Kwong의 가변 스텝 사이즈 알고리즘을 사용한 경우와 제안된 알고리즘의 비교이다. Fig. 5는 SNR이 30 dB인 경우이고 Fig. 6은 SNR이 20 dB 인 경우이다. SNR이 30 dB인 경우는 Fig. 5에서 보듯이 Kwong의 알고리즘과 제안된 알고리즘의 성능이 유사하다. 그러나 SNR이 20 dB인 경우, 즉 가산 잡음이 클 경우 앞에서 언급한 바와 같이 Kwong의 알고리즘은 성능 저하가 발생한다. 이를 Fig. 6에서 확인 할 수 있다. 가산 잡음을 고려하지 않은 Kwong의 알고리즘은 가산 잡음이 클 경우 제안된 알고리즘에 비하여 낮은 성능을 보임을 알 수 있다.
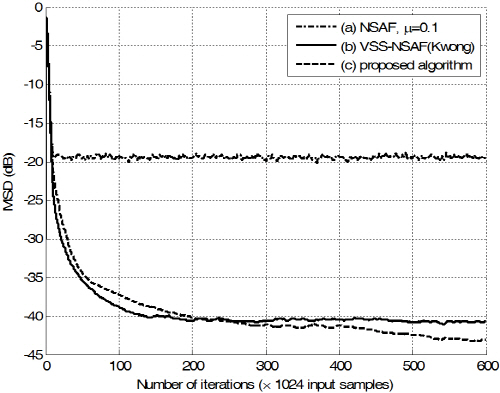
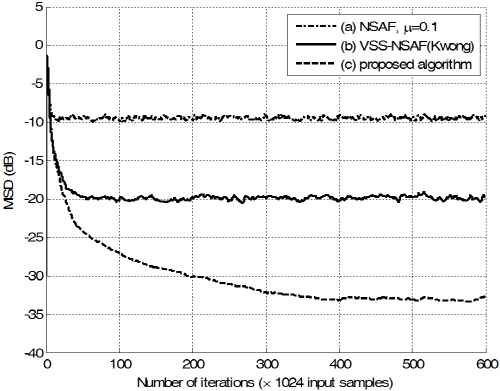
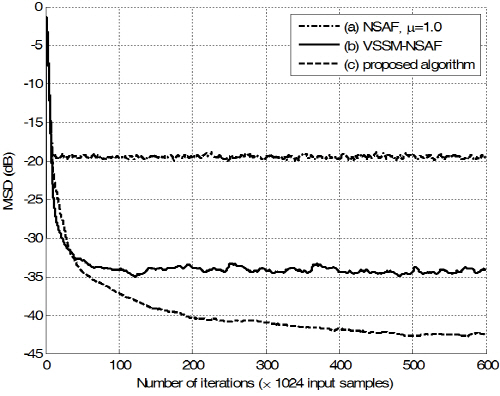
Fig. 7은 Ni와 Li[8]이 제안한 VSSM-NSAF와 제안된 알고리즘의 성능을 보여 준다. 제안된 알고리즘이 VSSM-NSAF에 비하여 더 좋은 수렴 후 특성을 보임을 알 수 있다.
한편, 제안된 알고리즘 및 VSSM-NSAF를 위해서는 밴드 별 가산 잡음인  을 필요로 하는데, 지금까지 제시한 모의 실험에서는 모두
을 필요로 하는데, 지금까지 제시한 모의 실험에서는 모두  을 미리 추정할 수 있다고 가정하였다. 많은 경우, 신호가 존재하지 않는 구간이 존재하고, 이럴 경우 이 구간에서는 가산 잡음만 존재한다고 가정할 수 있으므로 비교적 쉽고 정확하게
을 미리 추정할 수 있다고 가정하였다. 많은 경우, 신호가 존재하지 않는 구간이 존재하고, 이럴 경우 이 구간에서는 가산 잡음만 존재한다고 가정할 수 있으므로 비교적 쉽고 정확하게  추정할 수 있다. 그러나
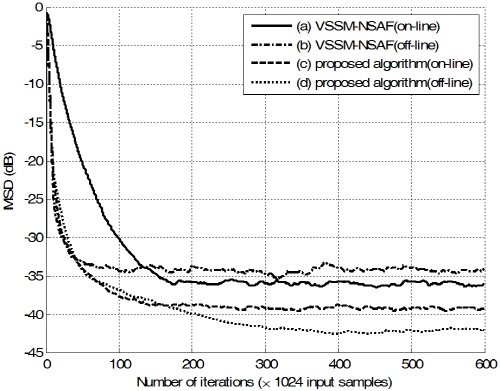
추정할 수 있다. 그러나  을 사전에 추정하는 것이 여의치 않은 경우에는 적응 필터가 동작하면서 on-line으로 추정해야 한다. Fig. 8은 식(8)을 이용하여
을 사전에 추정하는 것이 여의치 않은 경우에는 적응 필터가 동작하면서 on-line으로 추정해야 한다. Fig. 8은 식(8)을 이용하여  을 on-line으로 추정한 경우의 제안된 알고리즘과 VSSM-NSAF의 성능을 비교한 것을 보여준다. 실험 결과에 의하면 두 알고리즘은 서로 상이한 동작을 보인다. 제안된 알고리즘은 수렴 후 오차가 증가되는 반면, VSSM-NSAF은 수렴 후 오차가 감소하였다. 그러나 VSSM-NSAF의 경우에는 off-line 방식으로
을 on-line으로 추정한 경우의 제안된 알고리즘과 VSSM-NSAF의 성능을 비교한 것을 보여준다. 실험 결과에 의하면 두 알고리즘은 서로 상이한 동작을 보인다. 제안된 알고리즘은 수렴 후 오차가 증가되는 반면, VSSM-NSAF은 수렴 후 오차가 감소하였다. 그러나 VSSM-NSAF의 경우에는 off-line 방식으로  을 추정하였을 때보다 수렴 속도가 상당히 느려졌다. 제안된 알고리즘은 수렴 속도 면에 있어서는 큰 차이를 보이지 않았다. 이 실험을 통하여 제안된 알고리즘은
을 추정하였을 때보다 수렴 속도가 상당히 느려졌다. 제안된 알고리즘은 수렴 속도 면에 있어서는 큰 차이를 보이지 않았다. 이 실험을 통하여 제안된 알고리즘은  추정 오차가 수렴 후 특성에 영향을 미치는 반면, VSSM-NSAF은 수렴 속도에 영향을 미친다는 것을 알 수 있다.
추정 오차가 수렴 후 특성에 영향을 미치는 반면, VSSM-NSAF은 수렴 속도에 영향을 미친다는 것을 알 수 있다.
 is estimated on-line (SNR=30 dB).
is estimated on-line (SNR=30 dB).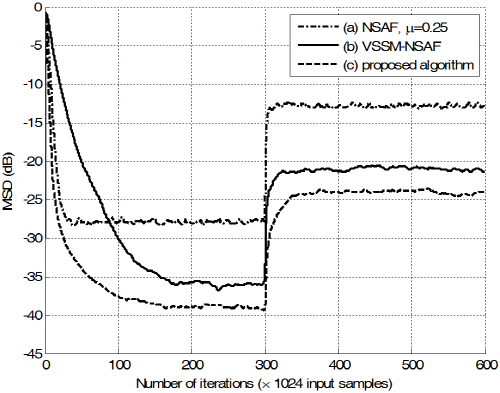
Fig. 9는 비정상 환경에서의 특성을 보여준다. 비정상 환경을 위하여 적응 필터 동작 도중에 가산잡음의 분산을 변경하였다. 초기에는 SNR이 30 dB에서 동작하다가 중간에 SNR을 15 dB로 변경하였다. 이 경우는 가산 잡음의 분산이 변경되는 환경이므로  을 on-line으로 추정하는 방식을 사용해야 한다. Fig. 9에서 보는 바와 같이 제안된 알고리즘이 비정상 환경에서도 좋은 성능을 보임을 알 수 있다.
을 on-line으로 추정하는 방식을 사용해야 한다. Fig. 9에서 보는 바와 같이 제안된 알고리즘이 비정상 환경에서도 좋은 성능을 보임을 알 수 있다.
V. 결 론
본 논문에서는 가산 잡음의 영향에 의존하지 않는 가변 스텝 사이즈 NSAF를 제안하였다. 널리 알려진 Kwong의 가변 스텝 사이즈 알고리즘은 가산 잡음이 증가됨에 따라서 그 성능이 저하되는 단점이 있다. 제안된 알고리즘은 추정된 가산 잡음을 적응 오차 신호에서 차감하고 이를 추정 가산 잡음으로 정규화함으로서 가산 잡음의 영향을 최소화 하였다. 또한 컴퓨터 모의 실험을 통하여 제안된 알고리즘을 기존에 제안된 알고리즘과 비하여 우수한 수렴 특성을 가진다는 것을 보였다. 그리고 가산 잡음의 off-line 추정과 on-line 추정에 대하여 각각 어떤 수렴 특성을 가지는 지에 대하여도 살펴보았다. 마지막으로 비정상 환경에서의 실험을 통하여 비정상 환경에서도 제안된 알고리즘이 우수한 수렴 특성을 가진다는 것을 보였다.
