

I. 서 론
수중 음향 네트워크는 감지된 수중 환경 정보를 활용하여 자연재해 감지, 해양 감시 체계와 같은 다양한 어플리케이션에 적용 가능할 것으로 기대되고 있다. 그러나 긴 수중 전파 지연, 좁은 대역폭, 다중 경로 페이딩으로 인해 효율적인 채널 사용에 어려움이 있다.[1-3]
지상 네트워크에서 매체 접속 제어(Medium Access Control, MAC) 프로토콜과 관련해서 여러 연구가 수행되었다. Bianchi[4]는 마코브 체인 모델을 활용하여 IEEE 802.11 DCF(Distributed Coordination Function) 시스템 처리율을 분석하였다. Hwang et al.[5]은 IEEE 802.11e EDCA(Enhanced Distributed Channel Access)에서 가상 충돌 처리기를 고려하여 시스템 처리율에 대한 분석을 수행하였다. Hwang et al.[6]은 IEEE 802.11 DCF의 보다 정확한 동작 분석을 위해 백오프 프리징을 고려하였다.
수중 음향 환경에서 긴 수중 전파 지연의 단점을 보완하기 위해 Molins와 Stojanovic[7]은 시간 슬롯을 고려한 S-FAMA(Slotted Floor Acquisition Multiple Access) 프로토콜을 발표하였다. Ng et al.[8]은 수중 음향 MAC을 위해 다수의 주변 노드들에게 패킷 열을 전송하는 MACA(Multiple Access Collision Avoidance) 기반의 MACA-MN 프로토콜을 발표하였다. 이를 통해 컨트롤 패킷 핸드쉐이크 과정에서 소요되는 시간을 감소시키고 채널 이용률을 향상시켰다. Ng et al.[9]은 ROPA(Reverse Opportunistic Packet Appending) 프로토콜 제안을 통해 수중 음향 환경에서 시스템 처리율과 전송 지연에 대한 이득을 분석하였다. ROPA는 이웃 노드들의 수중 전파 지연을 파악하고 이를 활용하여 송신자 기반의 전송을 스케쥴링하였다. Han et al.[10]은 M-FAMA(Multi-Session FAMA) 프로토콜을 제안하였고 다른 수중 MAC 프로토콜과 시스템 처리율 및 전송 공정성에 대해 비교·분석하였다. M-FAMA는 송신노드와 여러 수신노드 간 다중 세션 동시 전송을 수행하였다. Noh et al.[11]은 수중 음향 MAC을 위해 DOTS(Delay-Aware Opportunistic Transmission Scheduling) 프로토콜을 제안하였다. DOTS는 이웃 노드들의 지연 지도를 활용하여 동시 전송 스케쥴링을 수행하였다. Mandal and De[12]는 수중 음향 애드-혹 환경에서 시스템 이용률을 최대화하기 위해 수중 전파 불확실성을 고려하여 액세스 슬롯의 개수를 최적화하는 예약 프로토콜을 제안하였다. Qiao et al.[13]은 수중 음향 네트워크의 낮은 처리율을 향상시키기 위해 OFDM(Ortho-gonal Frequency Division Multiplexing)과 CDMA(Code Division Multiple Access) 기술을 사용한 전이중 다중 사용자 수중 음향 통신 모뎀을 구현하였다. Li et al.[14]은 수중 음향 환경에서 알로하 프로토콜을 사용하는 전이중 모뎀의 특성을 분석하고 이를 활용하여 FDCA(Full-Duplex Collision Avoidance) MAC 프로토콜을 제안하였다. Ng et al.[15]은 송수신 쌍이 다중 라운드에서 양방향 데이터 전송을 수행하는 슬롯 BiC-MAC(slotted Bidirectional-Concurrent MAC)의 1홉 포화 처리량(throughput)을 마코브 체인을 통해 분석하였다. Hwang and Cho[16]는 수중 전파지연을 고려하여 링 기반의 수중 네트워크를 모델링하고 제안하는 다중 RTS(Request-To-Send) 및 데이터 수신 MAC 프로토콜의 시스템 처리율과 지연을 수학적으로 분석하였다.
본 논문에서는 다수의 수중 센서 노드들이 존재하는 수중 음향 네트워크에서 전이중 특성을 활용한 양방향 전이중 매체 접속 제어 프로토콜을 제안한다. 수중 센서 노드들은 정보를 센싱하고 송신의 우선순위에 따라 백오프 타이머를 설정한다. 백오프 타이머가 만료된 수중 센서 노드는 송신 기회를 획득한다. 송신 기회를 획득한 소스 노드는 목적 노드에게 정보를 송신하기 위해 목적 노드의 ID를 포함한 RTS를 주변 노드들에게 방송한다. RTS를 수신한 목적 노드는 CTS(Clear-To-Send)를 소스 노드로 송신하여 양방향 전이중 통신 수행을 알린다. 소스 노드가 CTS를 수신한 후 소스 노드와 목적 노드는 센싱한 정보를 서로 상대 노드로 송신한다. 수중 환경에서의 기존 MAC 프로토콜은 긴 수중 전파 지연으로 인해 전송 성공에 많은 시간이 소요된다. 반면 제안하는 양방향 전이중 MAC 프로토콜은 전송 성공에 소요되는 시간을 단축하여 네트워크의 처리량을 향상시킨다. 본 논문에서는 제안하는 양방향 전이중 MAC 프로토콜의 네트워크 처리량을 수학적으로 분석한다. 그리고 수중 환경에서의 기존 MAC 프로토콜과 비교 분석을 통해 긴 수중 전파 지연이 존재하는 상황에서 제안하는 양방향 전이중 MAC 프로토콜의 성능이 더 뛰어남을 보인다.
II. 수중 음향 네트워크를 위한 양방향 전이중 매체 접속 제어 프로토콜
본 논문에서는 전이중 통신이 가능한  개의 수중 센서 노드들이 존재하는 수중 음향 네트워크를 고려한다.
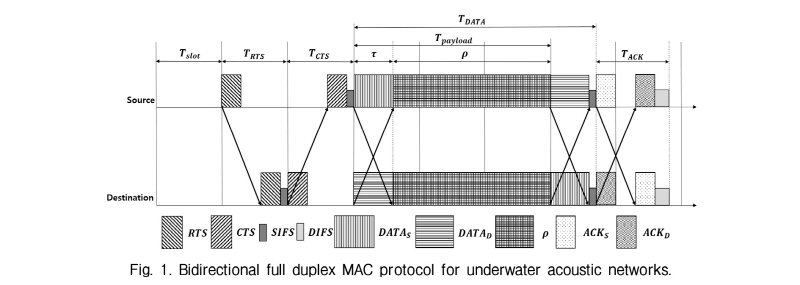
개의 수중 센서 노드들이 존재하는 수중 음향 네트워크를 고려한다.  개의 수중 센서 노드들은 센싱한 정보를 단일홉으로 목적 노드에게 송신한다. 이때 송신 기회를 획득한 소스 노드는 전이중 통신을 고려하여 목적 노드와 양방향으로 센싱한 정보를 주고받는다. 수중 센서 노드는 수중 환경에서 정보를 센싱하고 송신 시 서로 다른 우선순위를 고려한다. Fig. 1은 수중 음향 네트워크를 위한 양방향 전이중 매체 접속 제어 프로토콜의 동작을 보인다.
개의 수중 센서 노드들은 센싱한 정보를 단일홉으로 목적 노드에게 송신한다. 이때 송신 기회를 획득한 소스 노드는 전이중 통신을 고려하여 목적 노드와 양방향으로 센싱한 정보를 주고받는다. 수중 센서 노드는 수중 환경에서 정보를 센싱하고 송신 시 서로 다른 우선순위를 고려한다. Fig. 1은 수중 음향 네트워크를 위한 양방향 전이중 매체 접속 제어 프로토콜의 동작을 보인다.
수중 음향 네트워크를 위해 제안하는 양방향 전이중 MAC 프로토콜과 기존 MAC 프로토콜과의 차이는 전이중 통신의 특성으로 인해 소스 노드가 송신 기회를 잡았을 때 한번에 많은 양의 데이터를 동시에 양방향으로 전송할 수 있다는 점이다. 수중 환경에서 기존 MAC 프로토콜은 긴 수중 전파 지연으로 인해 전송을 완료하기 까지 많은 시간이 소요된다. 반면 제안하는 양방향 전이중 MAC 프로토콜은 전송 성공에 소요되는 시간을 단축하여 네트워크의 처리량을 향상시킨다.
송수신 센서 노드 간 최대 수중 전파 지연은  로 고려한다. 수중 전송 속도는
로 고려한다. 수중 전송 속도는  로 고려하고 RTS, CTS, ACK의 크기는 같으며
로 고려하고 RTS, CTS, ACK의 크기는 같으며  로 고려한다. SIFS(Short Inter-Frame Space)와 DIFS(Distributed Inter-Frame Space)는 센서 노드들의 매체 접근 연기 시간 간격으로 각각의 크기는
로 고려한다. SIFS(Short Inter-Frame Space)와 DIFS(Distributed Inter-Frame Space)는 센서 노드들의 매체 접근 연기 시간 간격으로 각각의 크기는  ,
,  이다.
이다.  은 슬롯 시간으로 그 크기는
은 슬롯 시간으로 그 크기는  로 고려한다.
로 고려한다.  ,,
,,  는 각각 컨트롤 패킷의 전송 성공 시 소요되는 시간으로
는 각각 컨트롤 패킷의 전송 성공 시 소요되는 시간으로  ,
,  에 대한 크기는
에 대한 크기는 
 로 고려하고,
로 고려하고,  의 크기는
의 크기는  이다.
이다.  는 전이중 통신을 통해 송수신이 동시에 이루어지는 시간에 해당한다. 데이터 전송 시 소요되는 시간은
는 전이중 통신을 통해 송수신이 동시에 이루어지는 시간에 해당한다. 데이터 전송 시 소요되는 시간은  이고 크기는
이고 크기는  이다.
이다.  는 성공적으로 데이터를 송수신하는데 소요되는 시간으로 크기는
는 성공적으로 데이터를 송수신하는데 소요되는 시간으로 크기는  이다.
이다.
 개의 수중 센서 노드들 중
개의 수중 센서 노드들 중  번째 센서 노드에서 전송할 데이터가 존재하면 초기 경쟁윈도우
번째 센서 노드에서 전송할 데이터가 존재하면 초기 경쟁윈도우  와 우선순위
와 우선순위  를 고려한 Eq. (1)에 의해 경쟁윈도우 크기
를 고려한 Eq. (1)에 의해 경쟁윈도우 크기  를 설정하고 0과
를 설정하고 0과  사이의 정수를 랜덤하게 선택하여 백오프 타이머를 설정한다.
사이의 정수를 랜덤하게 선택하여 백오프 타이머를 설정한다.
 (1)
(1)
백오프 타이머가 만료되어 전송기회를 잡은 소스 노드는 주변 노드들에게 목적 노드의 ID를 포함한 RTS를 방송한다. 목적 노드 이외의 주변 노드들이 RTS를 수신하면 소스 노드와 목적 노드간의 통신 시간동안 침묵하게 된다. 목적 노드가 방송된 RTS를 수신했을 때 소스 노드로 전송할 데이터가 존재할 경우, 목적 노드는 CTS를 소스 노드로 송신하여 양방향 전이중 통신 수행을 알린다. 목적 노드에서 소스 노드로 전송할 데이터가 존재하지 않는 경우에는 소스 노드에서 목적 노드로 단방향 통신이 수행된다.
소스 노드에서 CTS를 수신하고 SIFS가 지난 시점부터 소스 노드와 목적 노드는 동시에 상대 노드로 양방향 데이터 전송을 시작한다. 이때 소스 노드와 목적 노드는 수중 전파 지연의 영향으로  동안 상대 노드의 데이터를 수신하지 못한다. 그리고
동안 상대 노드의 데이터를 수신하지 못한다. 그리고  동안 상대 노드에게 보낼 데이터를 송신하면서 상대 노드로부터 송신된 데이터를 수신한다.
동안 상대 노드에게 보낼 데이터를 송신하면서 상대 노드로부터 송신된 데이터를 수신한다.
데이터 수신이 완료된 후 SIFS가 지난 시점에 소스 노드와 목적 노드는 서로의 데이터 수신 성공 여부를 알리기 위해 상대 노드에게 ACK를 송신한다. 소스 노드와 목적 노드가 상대 노드의 ACK를 수신하면 양방향 전이중 통신이 완료되며 DIFS 후에 수중 센서 노드들이 전송기회를 잡기 위한 경쟁이 발생한다. 만약 데이터 전송이 실패했을 경우에는 소스 노드는 데이터의 재전송을 위해 백오프 타이머를 다시 설정하고 전송기회 획득 경쟁에 참여한다.
 개의 수중 센서 노드들 중 적어도 하나의 노드가 데이터를 전송함으로써 발생하는 채널 혼잡 확률
개의 수중 센서 노드들 중 적어도 하나의 노드가 데이터를 전송함으로써 발생하는 채널 혼잡 확률  는 다음과 같다.
는 다음과 같다.
 (2)
(2)
여기서  은
은  개의 수중 센서 노드들 중 적어도 1개의 센서 노드의 백오프 타이머가 만료되어 전송 기회를 잡을 확률이다. 제안하는 양방향 전이중 MAC 프로토콜에서는 전송 실패 시 데이터를 재전송 하고자 할 때 전송 실패 횟수에 따른 경쟁 윈도우 사이즈의 변화를 고려하고 있지 않기 때문에
개의 수중 센서 노드들 중 적어도 1개의 센서 노드의 백오프 타이머가 만료되어 전송 기회를 잡을 확률이다. 제안하는 양방향 전이중 MAC 프로토콜에서는 전송 실패 시 데이터를 재전송 하고자 할 때 전송 실패 횟수에 따른 경쟁 윈도우 사이즈의 변화를 고려하고 있지 않기 때문에  번째 센서 노드에서 데이터를 전송할 확률은
번째 센서 노드에서 데이터를 전송할 확률은  이다.
이다.
 는
는  번째 수중 센서 노드의 데이터 전송이 성공할 확률로 다음과 같이 나타낼 수 있다.
번째 수중 센서 노드의 데이터 전송이 성공할 확률로 다음과 같이 나타낼 수 있다.
 (3)
(3)
여기서  은
은  번째 센서 노드에서 데이터를 전송할 확률이고
번째 센서 노드에서 데이터를 전송할 확률이고  은
은  번째 센서 노
번째 센서 노
드를 제외한 나머지 센서 노드들이 데이터를 전송하지 않을 확률이다.
제안하는 양방향 전이중 MAC 프로토콜에서  번째 수중 센서 노드의 처리량
번째 수중 센서 노드의 처리량  는 다음과 같다.
는 다음과 같다.
 (4)
(4)
여기서  는 전이중 통신 효율,
는 전이중 통신 효율,  는 프레임 오류 확률,
는 프레임 오류 확률,  는 유휴 슬롯 시간,
는 유휴 슬롯 시간,  는 전송 성공 시간,
는 전송 성공 시간,  는 충돌로 인한 전송 실패 시간,
는 충돌로 인한 전송 실패 시간,  는 프레임 오류로 인한 전송 실패 시간을 나타낸다.[17] Eq. (4)의 분자는
는 프레임 오류로 인한 전송 실패 시간을 나타낸다.[17] Eq. (4)의 분자는  번째 수중 센서 노드가 성공적으로 데이터를 전송했을 때 소요되는 시간이고, 분모는 유휴 슬롯 시간, 전송 성공 시간, 전송 실패 시간을 고려한 전송 갱신 간격이다. 전송 성공 시간과 충돌 및 프레임 오류로 인한 전송 실패 시간은 다음과 같다.
번째 수중 센서 노드가 성공적으로 데이터를 전송했을 때 소요되는 시간이고, 분모는 유휴 슬롯 시간, 전송 성공 시간, 전송 실패 시간을 고려한 전송 갱신 간격이다. 전송 성공 시간과 충돌 및 프레임 오류로 인한 전송 실패 시간은 다음과 같다.
 (5)
(5)
다음 장에서 제안하는 양방향 전이중 MAC 프로토콜과 기존의 단방향 반이중 CSMA/CA MAC 프로토콜 및 양방향 반이중 MAC 프로토콜인 BiC-MAC[15]의 성능을 다양한 환경에서 평가 및 비교 분석한다.
III. 성능 평가 결과 및 분석
본 장에서는 수중 음향 네트워크를 위한 양방향 전이중 MAC 프로토콜에 대한 성능 평가를 다음 파라미터들을 활용하여 실시한다. 수중 음파 전송 속도는 1500 m/s, 최대 수중 전파 지연은 3.3 s, PHY 헤더는 128 bits, MAC 헤더는 272 bits, RTS는 240 bits, CTS는 240 bits, ACK는 240 bits, SIFS는 0.1 s, DIFS는 0.2 s, 슬롯 시간은 3.84 s, 비트 오류율(Bit Error Rate)은 0.01 % ,[14] 수중 전송 속도는 710 bps를 사용한다.[13-16] 수중 환경에서 기존 MAC 프로토콜과 제안하는 양방향 전이중 MAC 프로토콜의 성능 비교를 위해 수중 음향 네트워크의 양방향 반이중 MAC 프로토콜인 BiC-MAC[15] 및 기존의 단방향 반이중 CSMA/CA MAC 프로토콜과 성능을 비교 분석한다. 본 논문에서 성능 비교를 위해 사용한 BiC-MAC에서  번째 수중 센서 노드의 처리량
번째 수중 센서 노드의 처리량  는 다음과 같다.[15]
는 다음과 같다.[15]
 (6)
(6)
여기서  는
는  번째 수중 센서 노드의 데이터 전송이 성공할 확률,
번째 수중 센서 노드의 데이터 전송이 성공할 확률,  는 프레임 오류 확률,
는 프레임 오류 확률,  는 채널 혼잡 확률,
는 채널 혼잡 확률,  는 유휴 슬롯 시간,
는 유휴 슬롯 시간,  는 전송 성공 시간,
는 전송 성공 시간,  는 충돌로 인한 전송 실패 시간,
는 충돌로 인한 전송 실패 시간,  는 프레임 오류로 인한 전송 실패 시간을 나타낸다.[15]
는 프레임 오류로 인한 전송 실패 시간을 나타낸다.[15]
Fig. 2에서는 수중 센서 노드가 전송기회를 잡았을 때 전송하고자 하는 데이터 페이로드의 크기가 11300 bits인 상황에서 수중 센서 노드 개수에 따른 제안하는 양방향 전이중 MAC 프로토콜, BiC-MAC, 기존의 단방향 반이중 CSMA/CA MAC 프로토콜의 정규화 처리량을 나타낸다. 가로축은 수중 센서 노드의 개수를 나타내고, 세로축은 정규화 처리량  를 나타낸다. 수중 센서 노드의 개수가 증가함에 따라 제안하는 양방향 전이중 MAC 프로토콜, BiC-MAC, 단방향 반이중 MAC 프로토콜의
를 나타낸다. 수중 센서 노드의 개수가 증가함에 따라 제안하는 양방향 전이중 MAC 프로토콜, BiC-MAC, 단방향 반이중 MAC 프로토콜의  가 증가한다. 수중 센서 노드의 개수가 동일한 경우 제안하는 양방향 전이중 MAC 프로토콜이 BiC-MAC, 단방향 반이중 MAC 프로토콜보다
가 증가한다. 수중 센서 노드의 개수가 동일한 경우 제안하는 양방향 전이중 MAC 프로토콜이 BiC-MAC, 단방향 반이중 MAC 프로토콜보다  가 높다. 이는 제안하는 양방향 전이중 MAC 프로토콜이 송신과 동시에 수신이 가능하므로 전송 성공에 소요되는 시간이 작기 때문이다.
가 높다. 이는 제안하는 양방향 전이중 MAC 프로토콜이 송신과 동시에 수신이 가능하므로 전송 성공에 소요되는 시간이 작기 때문이다.
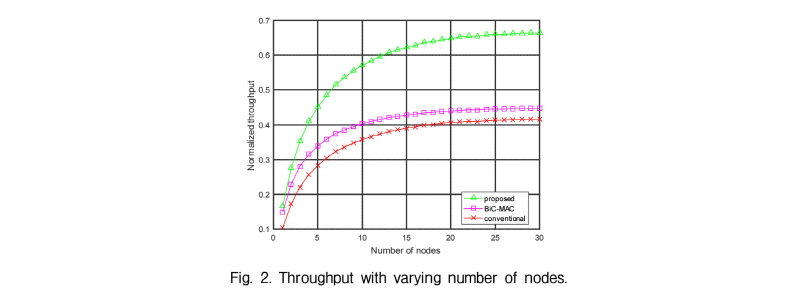
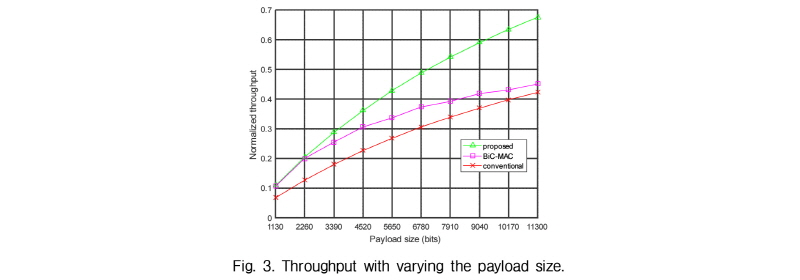
Fig. 3에서는 수중 센서 노드의 개수가 30개인 상황에서 전송하고자 하는 데이터 페이로드 크기에 따른 제안하는 양방향 전이중 MAC 프로토콜, BiC-MAC, 기존의 단방향 반이중 CSMA/CA MAC 프로토콜의 정규화 처리량을 나타낸다. 가로축은 데이터 페이로드의 크기를 나타내고, 세로축은 정규화 처리량  를 나타낸다. 데이터 페이로드의 크기가 증가함에 따라 제안하는 양방향 전이중 MAC 프로토콜, BiC-MAC, 단방향 반이중 MAC 프로토콜의
를 나타낸다. 데이터 페이로드의 크기가 증가함에 따라 제안하는 양방향 전이중 MAC 프로토콜, BiC-MAC, 단방향 반이중 MAC 프로토콜의  가 증가한다. 데이터 페이로드의 크기가 2260 bits일 때까지는 제안하는 양방향 전이중 MAC 프로토콜과 BiC-MAC의
가 증가한다. 데이터 페이로드의 크기가 2260 bits일 때까지는 제안하는 양방향 전이중 MAC 프로토콜과 BiC-MAC의  가 같으나 데이터 페이로드의 크기가 2260 bits보다 커질수록 제안하는 양방향 전이중 MAC 프로토콜의
가 같으나 데이터 페이로드의 크기가 2260 bits보다 커질수록 제안하는 양방향 전이중 MAC 프로토콜의  가 더 커진다. 이는 반이중 통신을 수행하는 BiC-MAC과 달리 제안하는 양방향 전이중 MAC 프로토콜은 전이중 통신을 수행하기 때문이다.
가 더 커진다. 이는 반이중 통신을 수행하는 BiC-MAC과 달리 제안하는 양방향 전이중 MAC 프로토콜은 전이중 통신을 수행하기 때문이다.
IV. 결 론
본 논문에서는 다수의 수중 센서 노드들이 존재하는 수중 음향 네트워크에서 전이중 특성을 활용한 양방향 전이중 매체 접속 제어 프로토콜을 제안하였다. 송신 기회를 획득한 소스 노드는 송신의 우선순위를 고려하여 센싱한 정보를 목적 노드에게 단일홉으로 전송한다. 이때 소스 노드는 전이중 통신을 고려하여 목적 노드와 각자 센싱한 정보를 양방향으로 주고받는다. 수중 환경에서의 기존 MAC 프로토콜은 긴 수중 전파 지연으로 인해 전송 성공에 많은 시간이 소요된다. 반면 제안하는 양방향 전이중 MAC 프로토콜은 송신과 동시에 수신이 가능하므로 전송 성공에 소요되는 시간을 단축하여 네트워크의 처리량을 향상시킨다. 본 논문에서는 제안하는 양방향 전이중 MAC 프로토콜의 네트워크 처리량을 수학적으로 분석하였다. 그리고 수중 환경에서의 기존 MAC 프로토콜과 비교 분석을 통해 긴 수중 전파 지연이 존재하는 상황에서 제안하는 양방향 전이중 MAC 프로토콜의 성능이 더 뛰어남을 보였다.
