

I. 서 론
현재 국내 사격 훈련 방법은 사로에 설치된 충격센서를 통해 적중 시 표적이 뒤로 넘어가 적중 여부만을 판단하는 실거리 사격과 사격 후 사로에 진입하여 표적지를 직접 확인하는 축소사격으로 이루어지고 있다. 실거리 사격에서 발생되는 문제는 기존에 다수의 사격으로 인하여 표적지에 구멍이 생긴 부분에 탄환이 들어 갈 경우 측정할 수 없는 문제와 표적을 빗나간 경우 사로에서 육안으로 확인이 불가한 문제가 있다. 또한 적중해 타겟이 넘어가더라도 어느 부분에 맞았는지 확인하기 어렵다. 반면, 축소 사격의 경우는 실거리 사격에서의 문제점과 함께 사수가 사로로 진입하여 표적을 확인, 교체하는 과정에서 발생하는 잠재적인 위험요소가 추가로 존재한다.
이러한 문제점들을 해결하기 위하여 몇몇 세계 주요 국가에서는 자동화된 탄착점 식별 시스템(Location of Miss And Hit, LOMAH )을 연구해오고 있으며, 일부는 상용화되어 실제 군 부대 사격훈련에 도입되어 사용되고 있다. LOMAH 시스템 또는 스마트 타겟이라 불리는 이 시스템은 표적 아래 1조 이상의 마이크로폰 어레이를 두어 표적을 향해 초음속으로 비행하는 탄환으로부터 발생하는 탄환 충격파를 분석하여 탄착점을 추적하고 탄착점의 좌표를 소형 디스플레이를 통해 사수에게 제공한다. 이를 통해 사격 훈련의 효율성과 효과를 높일 수 있다. 현재 LOMAH 시스템은 미 육군에서 자체 개발에 성공하여 실제 부대에 도입하였으며,[1] 네덜란드, 오스트리아, 독일 등 세계 각국의 부대 또한 이 시스템을 운용중에 있다.[2]

일반적으로 군 부대에서 운용되는 탄착점 식별 시스템은 표적지 아래에 2조 또는 3조의 마이크로폰 어레이를 설치하여 마하 속도로 비행하는 탄환의 충격파 신호를 검출하여 탄착점을 계산한다. 탄착점 추정을 위해 사용되는 방법은 각 마이크로폰에 도달하는 신호의 도착 시간을 이용한 ToA(Time of Arrival) 방식[3]과, 각 마이크로폰 쌍에 도달하는 신호의 도착 시간 차이를 이용한 TDoA(Time Difference of Arrival)방식,[4] 등 크게 두가지 유형으로 분류할 수 있다. ToA 방식은 신호를 수신하는 마이크로폰 센서 간에 정밀한 시각 동기가 필요하며 만약 동기 오차가 발생하면 탄착점 연산에 큰 오차가 발생하는 단점이 있다. 반면, TDoA 방식은 마이크로폰 센서간의 시간 동기가 필요하지 않으므로 알고리즘의 구현이 용이한 장점을 가지고 있다.[5]
탄착점 식별 시스템은 군사 장비의 특성상 상세 동작 알고리즘을 소개하고 있는 논문이나 문서는 거의 없는 실정이며 관련 기술 대부분이 특허[6,7]로 간단하게 그 기능만이 기술되어 있거나 상용화된 제품 소개문서[8,9]로 다루어지고 있다. 탄착점 식별 특허 [6],[7]에서는 마이크로폰 센서의 배치와 회로 구성등을 다루고 있다 . 실거리 및 영점 사격 훈련용으로 상용화 된 제품인 [8,9]에서는 비교적 제품의 제원을 상세하게 소개하고 있으며, 탐지 가능한 최소 탄속, 수평 입사각 및 고각 등 제한사항도 명시되어 있다. 하지만 관련 동작 알고리즘이나 계산방법에 관한 설명은 다른 특허나 제품소개 문서와 동일하게 제공되지 않는다.
반면, LOMAH 시스템 알고리즘이 수학적인 형태로 자세히 기술된 문서는 논문[10]이 유일하다. 논문[10]은 ToA 방식을 사용한 시스템으로 각 마이크로폰에 도달한 탄환 충격파의 도착 시간인 ToA를 탄환의 탄착점, 수평 입사각, 속도 등의 함수로 표현하고, 이들 비선형 함수들을 최소 제곱법 알고리즘을 이용해 해를 구하고 있다.
본 연구는 논문[10]의 확장으로 기존 ToA 방식 알고리즘을 TDoA 기반 알고리즘으로 확장 발전시켜 기존의 시간 동기화 문제를 해결하였고, 실제 사격 실험을 통해 제안된 알고리즘의 성능을 검증하였다.
본 논문의 구성은 다음과 같다. 먼저 2장에서는 탄착점 식별에 사용되는 탄환 충격파 신호의 특성과 논문[10]의 ToA 기반 탄착점 추정 알고리즘을 설명한다. 3장에서는 제안된 TDoA 기반 알고리즘을 설명한다. 4장에서는 실험 방법과 실제 사격을 통한 성능검증을 수행한다. 마지막으로 5장에서는 실험 결과에 대한 결론을 맺는다.
II. 관련 연구
소총화기로부터 탄환이 발사될 때는 크게 두 가지의 음향 신호가 발생한다. 하나는 초음속으로 비행하는 탄환에 의해 발생하는 탄환 충격파 그리고 또 하나는 총구로부터 구형파의 형태로 전파되는 총성 신호이다. 탄착점 식별 시스템에서는 탄환 충격파를 감지하여 표적의 탄착점을 계산해 낸다. 보통 마이크로폰 주변 환경에 따라 잡음 및 반향 등이 반영되기 때문에 신호 전체를 파악하기 보다는 비교적 잡음에 덜 민감한 신호의 도달 시간(ToA)을 검출하여 계산하는 것이 일반적이라 할 수 있다[11].
Fig. 2에서 탄환의 궤적과 원뿔 사이의 각도를 마하 각도라 부르며, Eq. (1)과 같이 계산 할 수 있다. Eq. (1)에서 M은 마하수로 M = V/C 와 같이 계산 될 수 있다. V는 탄환속도 그리고 C는 음속을 나타낸다. 탄환의 비행 속도가 작아질수록 마하 각도는 커지게 된다. 마하속도의 탄환에서 발생하는 탄환 충격파는 N자 형태의 모습을 갖추고 있어 N - 파형으로도 불린다.[12]
 (1)
(1)
논문[10]에서 제안하는 탄착점 추정 알고리즘은 탄환 충격파가 각 마이크로폰에 도달한 시간(ToA)을 연립 방정식으로 정의하고, 이를 GN(Gauss - Newton) 알고리즘, LM(Levenberg - Marquardt) 알고리즘 등 최소제곱법을 이용해 탄착점을 추정한다.
Fig. 3은 탄환이 타겟을 통과 할 때 탄환 충격파 발생시점(B)와 마이크로폰 위치(Sk), 그리고 실제 탄착점(H), 수평 입사각(α)에 관한 모습을 보여주고 있다. B에서 발생한 충격파가 마이크로폰 Sk까지 도달한 시간인 ToA를 tk라 정하고, 이때 tk를 Eq. (2)와 같이 정의한다.
 (2)
(2)
Eq. (2)에서 toffset은 모든 마이크로폰 공통으로 지연된 시간이며  로 나타내며, C는 음속, V는 탄환의 속도, y0는 마이크로폰에 도달한 신호의 위치를 나타낸다. 각 마이크로폰의 도달 시간 및 위치를 이용하여 마이크로폰의 개수만큼 비선형 방정식이 정의된다. Eq. (2)에서 미지의 값은 탄착점(x, h), 음속 C, 탄환의 속도 V, 수평 입사각 α, 공통 지연시간 toffset 등 총 6개이므로, 연립방정식을 통해 계산하기 위해서는 6개 이상의 식, 즉 6개 이상의 마이크로폰 신호가 필요하다. 음속 C는 발사 당시 온도를 알 수 있으면 Eq. (3)을 이용해 구할 수 있다.
로 나타내며, C는 음속, V는 탄환의 속도, y0는 마이크로폰에 도달한 신호의 위치를 나타낸다. 각 마이크로폰의 도달 시간 및 위치를 이용하여 마이크로폰의 개수만큼 비선형 방정식이 정의된다. Eq. (2)에서 미지의 값은 탄착점(x, h), 음속 C, 탄환의 속도 V, 수평 입사각 α, 공통 지연시간 toffset 등 총 6개이므로, 연립방정식을 통해 계산하기 위해서는 6개 이상의 식, 즉 6개 이상의 마이크로폰 신호가 필요하다. 음속 C는 발사 당시 온도를 알 수 있으면 Eq. (3)을 이용해 구할 수 있다.
 (3)
(3)
논문[10]에서는 Eq. (2)의 비선형 연립방정식을 풀기 위해 GN 알고리즘 등을 이용하여 근사해를 구한다. 하지만 ToA 기반 측정방식은 마이크로폰간에 시간 동기화가 필요하여 구현이 어려우며 만약 동기 오차가 발생하면 탄착점 연산에 큰 오차가 발생하는 단점이 있다.
III. TDoA기반 탄착점 추정 알고리즘
본 논문에서 제안한 TDoA 방식은 논문[10]의 ToA 방식과 달리 마이크로폰간의 시간 동기화가 필요 없어 구현에 용이한 장점을 가지고 있다. TDoA 측정 방법은 다수의 마이크로폰 중 가장 먼저 신호가 도달한 마이크로폰을 기준(Sm)으로 설정하고 다른 마이크로폰(Sn)과의 신호 도달시간 차인 TDoA를 연산해서 이를 이용하여 탄착점의 위치를 추정한다.
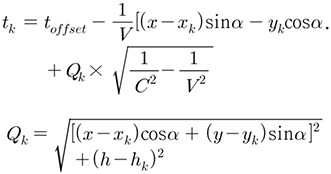
본 논문에서는 논문[10]의 ToA 기반 알고리즘을 TDoA 기반 알고리즘으로 확장 구현한 후 Gauss - Newton법을 이용하여 탄착점의 위치를 추정하고, 실제 사격 실험을 통하여 그 성능을 검증하였다. Gauss - Newton법을 이용하기 위해서는 기존에 정의한 Eq. (2)를 각 미지 값에 대한 편미분을 새로이 구하고, 구해진 편미분을 반복알고리즘을 이용하여 값을 추정한다. 수식 연산의 편의를 위해 Eq. (2)의 tk를 Eq. (4)로 다시 정의한다.
 (4)
(4)
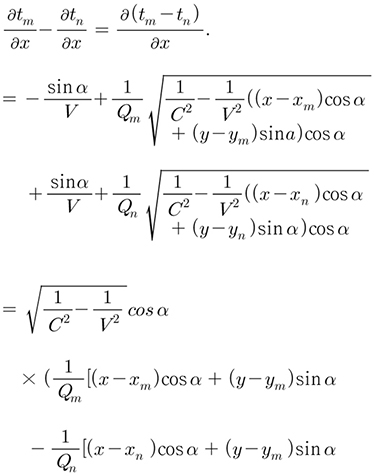
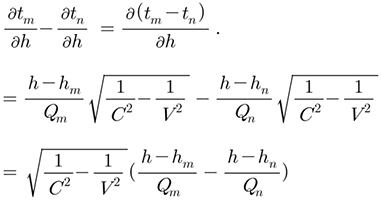
한편 각 마이크로폰 센서간의 도달 시간차인 TDoA는 TDoAmn = tm - tn으로 정의하며 각 미지 변수 탄착점 (x, h), 수평 입사각 α, 공통지연시간 toffset, 탄환의 속도 V에 대한 편미분은 다음과 같이 구할 수 있다.
 (5)
(5)
 (6)
(6)
 (7)
(7)
이때 toffset은 소거되어 TDoA 연산에서는 사용되지 않는다.
 (8)
(8)
 (9)
(9)
Eqs. (5) ~ (9)와 같이 편미분이 주어지면 Gauss - Newton 법을 이용하여 각 미지 변수 값 x, h, α, V의 값을 구할 수 있다. 먼저 미지 변수 값들을 Eq. (10)과 같이 벡터로 표현한다.
 (10)
(10)
Eq. (10)에서 T는 주어진 행렬의 전치행렬을 나타낸다. 신호가 가장 먼저 도달한 기준 마이크로폰을 M이라고 할 때 각 마이크로폰 쌍 간의 도달시간 차인 TDoA 벡터를  으로 정의할 수 있고, 실제 측정된 TDoA와의 차이 값인 변화량을
으로 정의할 수 있고, 실제 측정된 TDoA와의 차이 값인 변화량을  로 표현하면 Eq. (11)과 같다.
로 표현하면 Eq. (11)과 같다.
 (11)
(11)
 는 기준 마이크로폰 M과 임의 마이크로폰 i 간의 신호 도달시간차를 말하며,
는 기준 마이크로폰 M과 임의 마이크로폰 i 간의 신호 도달시간차를 말하며,  는 실제 측정된 TDoA를 나타낸다.
한편, TDoA 기반 비선형 연립 방정식은 Eq. (12)와 같이 Gauss-Newton 반복 연산을 통하여 미지 변수
는 실제 측정된 TDoA를 나타낸다.
한편, TDoA 기반 비선형 연립 방정식은 Eq. (12)와 같이 Gauss-Newton 반복 연산을 통하여 미지 변수  에 대한 해를 구할 수 있다.
에 대한 해를 구할 수 있다.
 (12)
(12)
Eq. (12)에서 H는 Eq. (13)과 같이 편미분된 N x 4 형태의 (k, j)요소를 가지고 있는 행렬로 정의된다.
 (13)
(13)
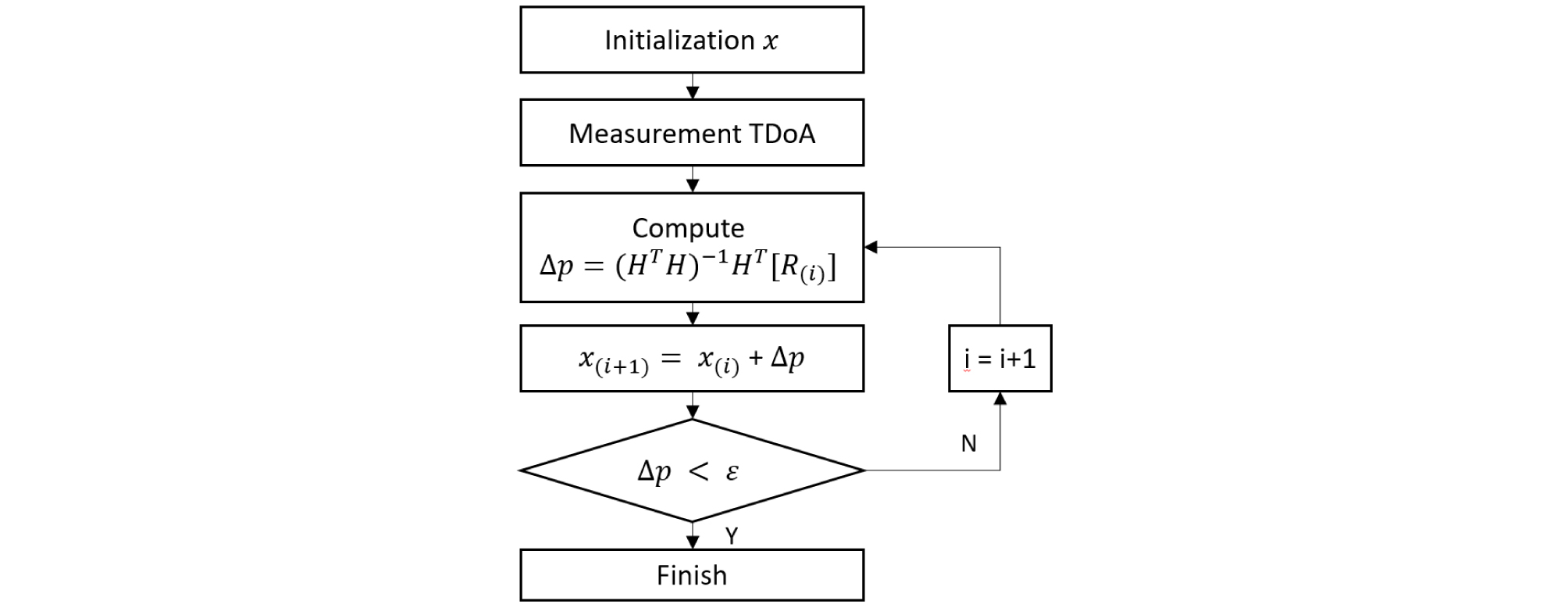
일반적으로 Eq. (12)의 초기 값으로 x와 h값은 타겟의 중앙좌표, V는 일반적 탄환의 속도 800 m/s, α는 0으로 설정할 수 있다.
Fig. 4는 본 연구의 TDoA 기반 탄착점 추정 과정을 블록 다이어그램으로 나타낸 것이다.
IV. 실험 결과 및 분석
3장에서 제안된 탄착점 추정 알고리즘을 실제 사격 실험을 통해 검증하였다. 사격실험은 2017년 8월 국내 A 사격장에서 실시하였다. 이 사격실험은 평지위에 세워진 표적으로부터 각각 100 m, 200 m, 300 m 떨어진 위치에서 5.56 mm 탄환과 7.62 mm 탄환을 사용해 총 30발 사격을 실시하였다. 매 사격마다 사로로 진입하여 탄착점을 확인 기록 하였으며, 실험 당시 평균온도는 31°C, 습도는 45 %였다.
본 연구에서 구현한 탄착점 식별 시스템은 Fig. 5와 같이 군용 사격 표적과 델타형 2조 마이크로폰 어레이로 구성하였다. 마이크로폰 어레이 시스템은 각 변이 15 cm인 정삼각형의 마이크로폰 어레이 2조가 서로 68 cm 떨어진 상태이며, 각 마이크로폰 어레이는 같은 평면상에 위치한다. 탄환 충격파 신호의 습득을 위한 DAQ(Data Acquisition)는 Adlink사의 PXES-2301에 PXIe-9848 디지타이저를 장착하여 이용하였으며, 마이크로폰은 PCB사의 130E20을 이용하였고, 마이크로폰에 전원을 공급하는 파워 컨디셔너는 PCB사의 483C05를 이용하였다.
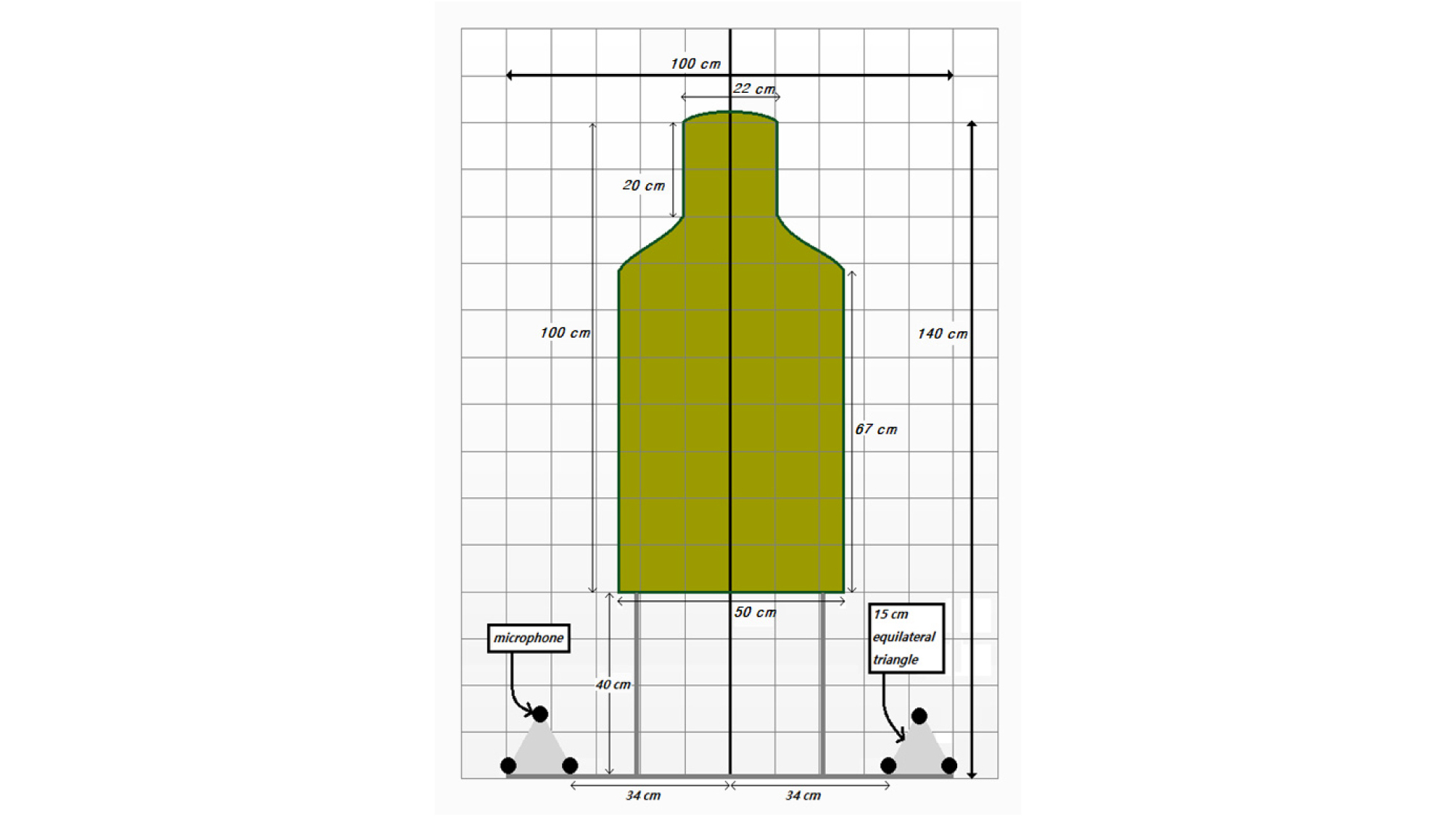
Table 1은 사격 실험에서 습득한 23개 데이터를 사격 조건 및 실제 좌표와 TDoA로 계산된 좌표, 속도를 나타낸 표이다. 실제 사격실험에서는 총 30발을 사격하였으나 시험용 5발과 함께 5.56 mm 2발이 300 m 사격에서 타겟을 벗어나 최종적으로 23개 데이터를 습득하였다.
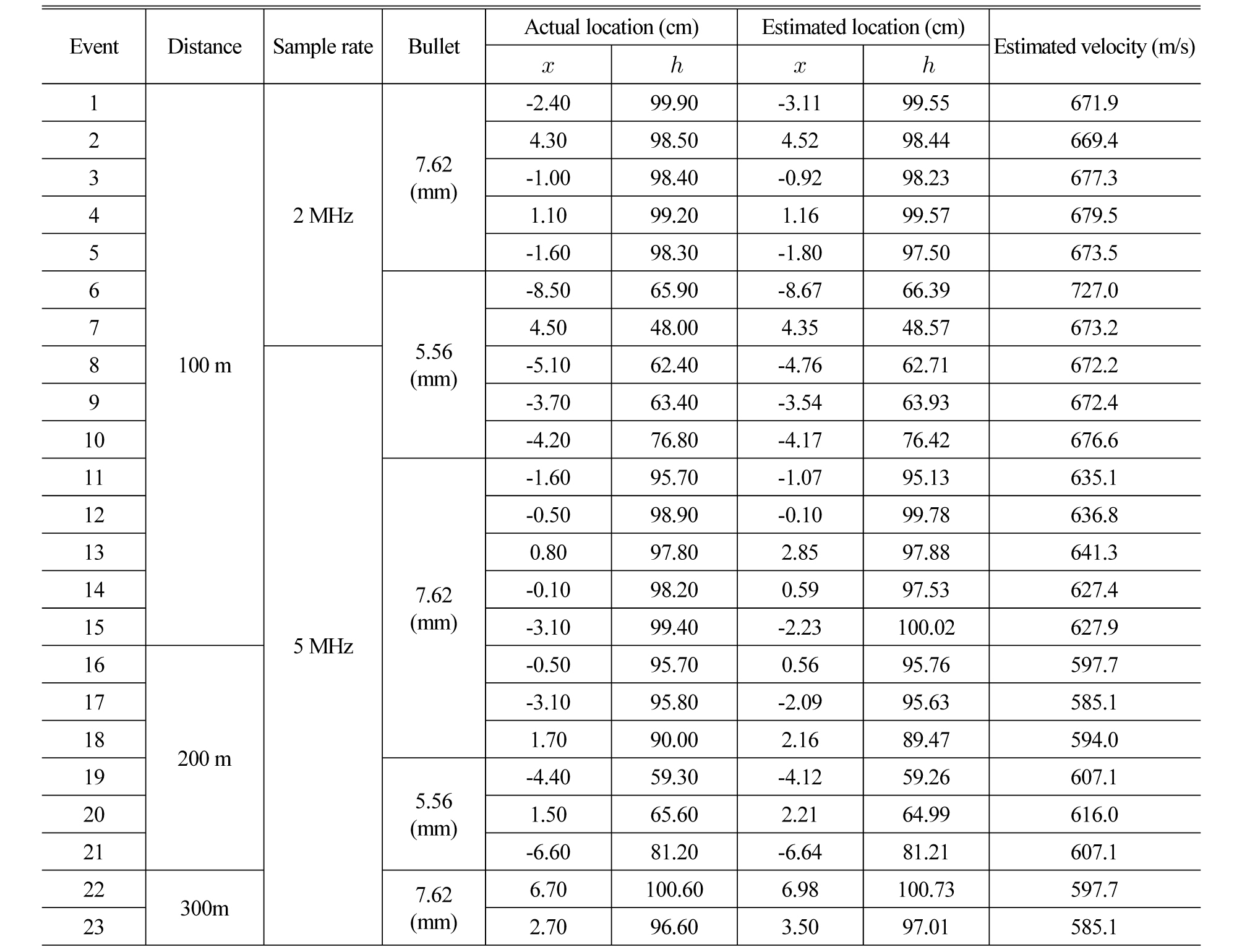
Fig. 6은 실제 탄착점(◆)과 논문[10]의 ToA(■)알고리즘과 TDoA(▲)알고리즘으로 계산된 탄착점을 좌표로 나타낸 것이며 단위는 cm이다. 알고리즘으로 추정된 좌표가 오른쪽으로 약간 편향 된 경향을 보여준다.
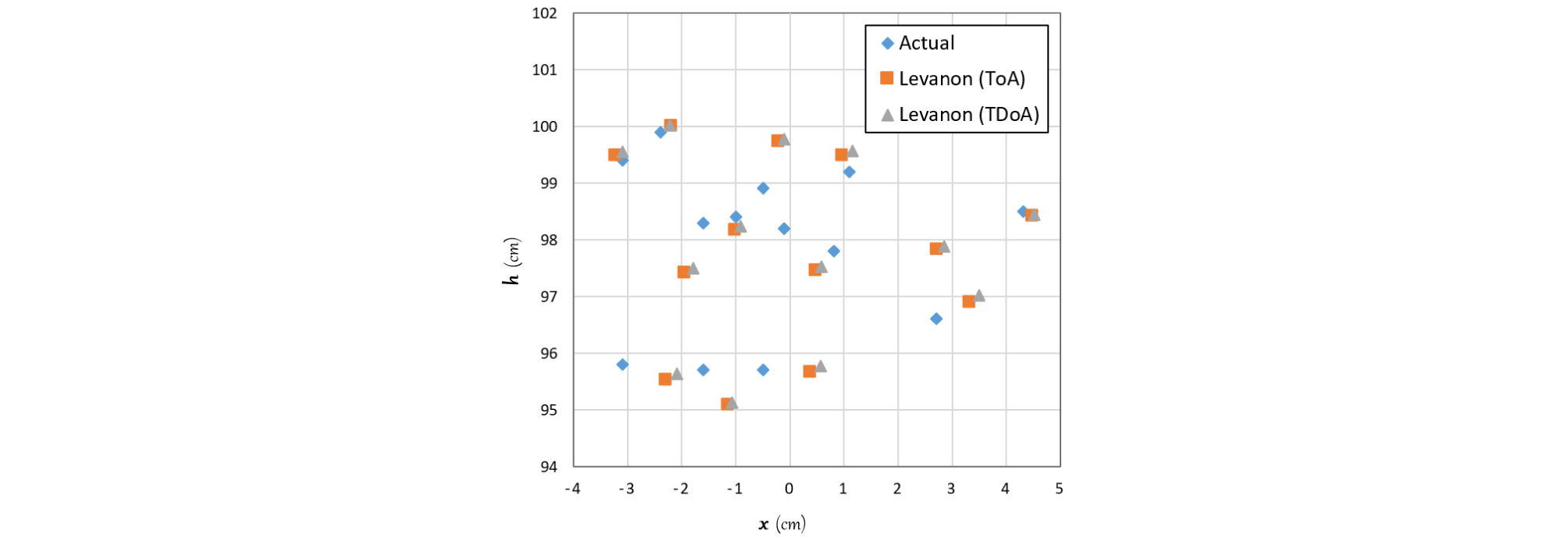
Table 2는 논문[10]의 ToA 방식과 본 연구의 TDoA 방식으로 연산한 결과를 비교 하였다. 전반적으로 Table 1과 Fig. 6을 통해 기존 알고리즘과 제안된 알고리즘의 결과 가 크게 차이나지 않음을 볼 수 있다. 그러나 본 연구에서 제안한 TDoA방식의 경우 ToA 방식에서 발생할 수 있는 동기화 오차를 방지 할 수 있기 때문에 본 논문의 제안 알고리즘이 더욱 유리할 것으로 판단된다.
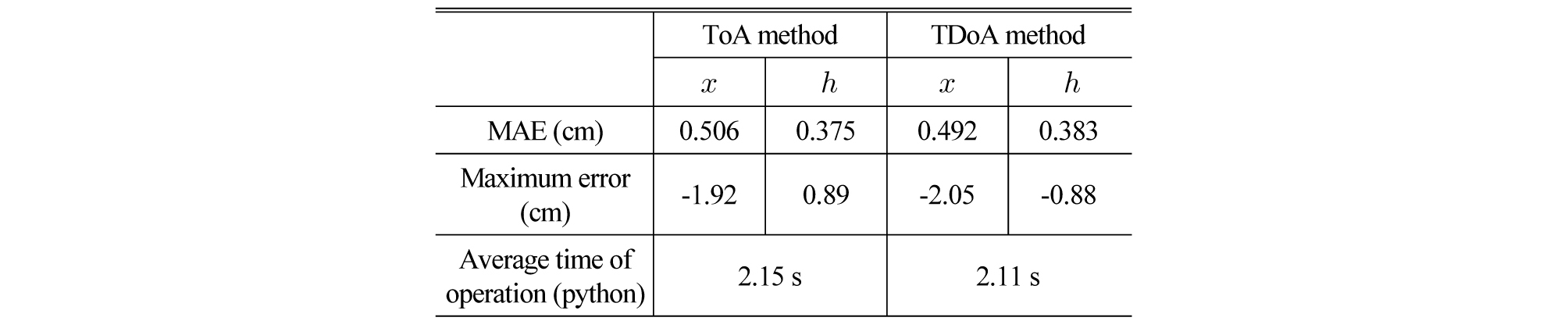
Table 2에서 절대 평균 오차(Mean Absolute Error, MAE)는 Eq. (14)와 같이 계산되었다.
 (14)
(14)
Eq. (14)에서 yi는 계산된 좌표, xi는 실제 좌표이며, n은 데이터의 개수를 나타낸다.
Table 3은 사거리에 따른 x축과 h축에 대한 MAE를 정리한 표이다. Table 3에서 보듯이 거리와 오차 사이에 뚜렷한 상관관계가 보이지는 않는다. 다만 표본수가 부족하기에 향후 추가적인 실험을 통해 사거리에 따른 오차 분석이 조금 더 필요 할 것으로 보인다.

Table 4는 사격 실험에 사용한 7.62 mm 탄환과 5.56 mm 탄환에 관한 x축과 h축에 대한 MAE를 정리한 표이다.

Table 5는 Gauss-Newton 연산 횟수에 따른 x축과 h축에 대한 MAE를 정리한 표이다. 연산 횟수가 많을수록 정확도가 향상되는 것을 확인 할 수 있다. 하지만 연산 횟수를 늘릴 경우 연산 시간도 늘어나기 때문에 본 논문에서는 최대 연산 횟수를 50,000회로 제한하였으며, xn - xn+1과 hn - hn+1의 절대값이 각각 0.1 µm 이내일 경우 연산을 종료하게 프로그래밍 하였다. 이때 평균 연산 횟수는 9,244회이며, 평균 연산수행시간은 2.11 s이다.

Table 6은 Sampling rate에 따른 x축과 h축에 대한 MAE를 정리한 표이다. Sampling rate가 높을수록 연산 정밀도가 높아져 결과 정확도가 향상되는 것을 확인 할 수 있다.
일반적으로 탄착점 추정 시스템에서 허용되는 오차 범위는 사용되는 탄환 구경에 해당되며, 본 연구의 경우 탄착점 추정 오차 범위 역시 사용된 탄환의 구경 내에 존재하고 있어 제안 알고리즘이 우수한 성능을 보이고 있음을 알 수 있다. 평균 오차의 경우 5.56 mm 탄환과 7.62 mm 탄환 모두 x, h축 허용 범위 내에 있으며, 구경이 작은 5.56 mm 탄환이 7.62 mm 탄환보다 오차가 작음을 확인 할 수 있다.
현재로써는 본 연구의 제안 알고리즘을 실제 어플리케이션에 적용하기 적합하다고 할 수 있으나 조금 더 많은 표본 확보와 함께 12.7 mm 등 다양한 구경뿐만 아니라 좀 더 장거리 사격에서 실험을 통하여 정확도에 관한 연구가 추가되어야 할 것이다.

Fig. 7은 거리별 실제 탄속과 알고리즘에 의해 추정된 탄속을 그래프로 나타낸 것이다. 실제 탄속 측정은 발사시점, 50 m, 100 m, 150 m, 300 m 구간에서 도플러 속도계를 이용하여 5.56 mm 탄환과 7.62 mm 탄환의 속도를 측정하였다. 5.56 mm의 탄환 초기속도가 7.62 mm 탄환보다 약 15 %가량 빠르지만 사거리가 증가할수록 속도는 비교적 선형적으로 감소하며 5.56 mm의 감소폭이 큰 것을 확인 할 수 있다.
계산된 결과와 실제 측정 결과를 비교해보면 특히 5.56 mm 탄환의 경우 100 m 구간에서 130 m/s 이상의 차이를 보여주고 있으며 평균적으로 80 m/s 가량의 오차가 발생하였다. 이와 같은 오차는 마이크로폰의 배치구조에서 발생했을 것으로 추정된다.
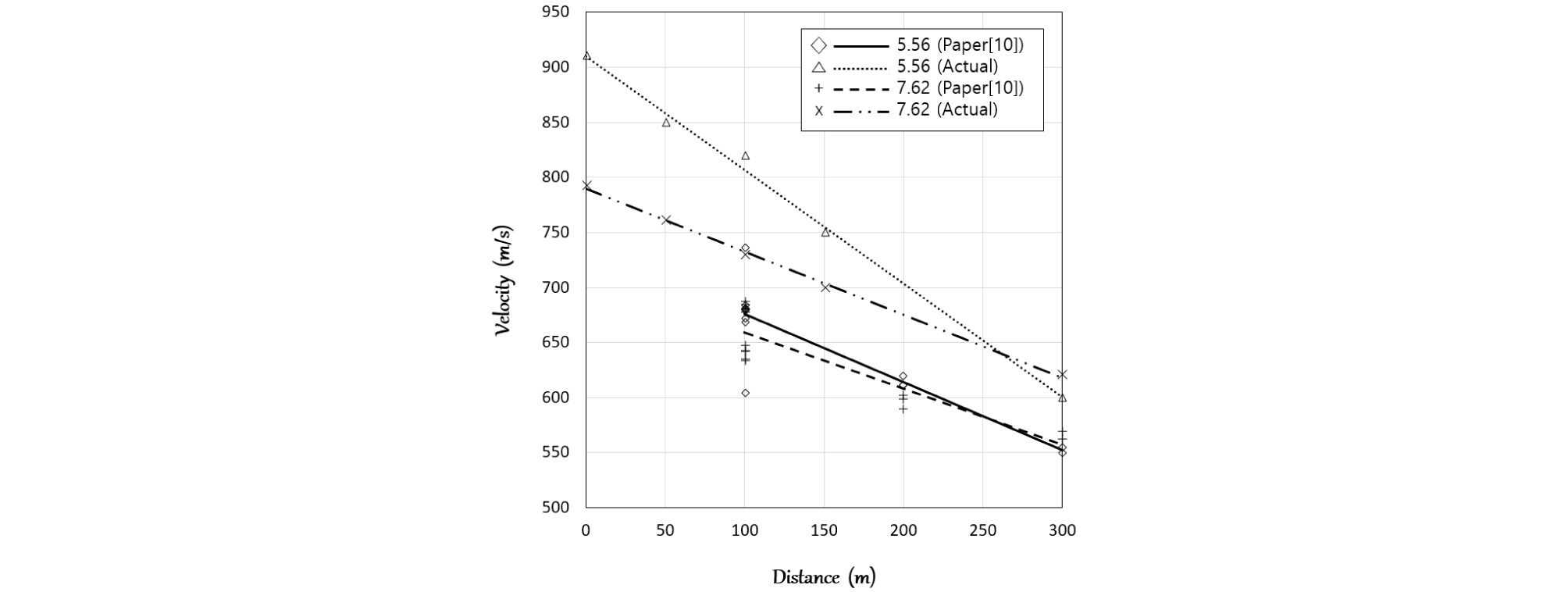
오차를 줄일 수 있는 방법은 하나 이상의 부가적인 마이크로폰을 타겟 앞에 추가 배치하거나, 기존과 동일한 마이크로폰 배치를 타겟면과 같은 평면으로 설치하는 것이 아닌 약간 기울여 배치를 하는 방법이 있다. 마이크로폰 배치구조를 조정하여 탄속의 정확도가 높아진다면 전체적인 정확도 역시 향상될 것으로 예상 할 수 있다.
