

I. 서 론
다양한 악기 음 합성 기술 중 물리적 모델링은 대상 악기의 구조적, 물리적 특성을 측정, 분석을 통해 악기 음의 발생 원리를 규명하고, 이를 수학적 모델링을 통해 합성하는 방식이다. 이론적으로 물리적 모델링이 가장 자연스러운 음을 합성할 수 있다지만, 실제로 이를 구현하기 위해서는 복잡도가 높은 많은 수학적 연산이 수반되어야 한다. 역사적으로 살펴볼 때 최초의 물리적 모델링은 1961년 Kelly와 Lochbaum[1]의 “Bicycle built for two” 작품에서부터 시작된다. 하지만 80년대 초반에 KS알고리듬[2]이 소개된 이 후에야 Smith[3]에 의해 아주 효율적인 방법인 디지털 도파관 합성법(digital waveguide synthesis)이 발표된다. 이 합성법은 파동의 이동을 간단한 지연 라인(delay line)으로 묘사하고, 악기의 나머지 부분은 각각 기능별로 구분하여 디지털 필터로 구현한다. 예를 들어 기타의 경우, 현은 지연라인으로, 현의 파동을 전달하고 증폭시키는 브리지와 몸통은 각각 디지털 필터로 표현하는 것이다. 또한, 이렇게 기능별로 구현된 필터는 유사한 악기에 공통으로 사용될 수 있는데, 기타의 현은 다른 뜯는 현악기의 현의 모델로, 가야금의 안족은 거문고나 아쟁의 안족 모델로 사용될 수 있다.
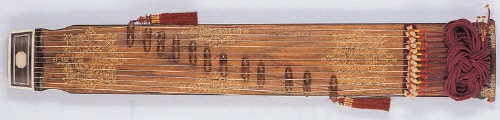
가야금의 안족은 Fig. 1과 같이 가야금의 몸통 윗부분에 놓여 각각 하나의 안족이 하나의 현을 받치고 있다. 즉, 안족은 현의 진동을 몸통으로 전달하는 기능과 실제 진동하는 현의 길이를 조절함으로써 피치를 결정하는 조율 기능을 담당한다. 조율 기능에 있어 안족은 프렛 악기(fretted instrument)의 프렛과 많은 차이가 있다. 기타는 평균율(equal temperament)에 근거한 대표적인 프렛 악기로써 프렛 12개가 한 옥타브를 표현할 수 있도록 설계되어 있으며 프렛과 프렛사이에는 정확히  배의 피치 차이가 있다. 따라서 개방현의 피치를 정하면 각 현의 프렛 위치에 따른 피치는 자동적으로 결정된다. 예를 들어 표준 조율법(standard tuning)으로 조율된 6번현의 경우 개방현은 E, 첫 번째 프렛은 F, 두 번째 프렛은 F#의 순서로 피치가 자동 결정된다. 그러나 가야금의 안족은 이러한 프렛과 달리 특정 피치를 내기 위한 위치가 고정되어 있지 않으며 구조적으로도 현침에서 학슬까지 안족이 현을 받칠 수 있는 곳이라면 어디든 위치할 수 있다. 따라서 안족은 프렛과 같이 위치에 따른 고정된 피치의 차이가 없다. 게다가 산조 가야금의 경우 조율을 위한 기준음도 연주자에 따라 다를 수 있다.[4]
배의 피치 차이가 있다. 따라서 개방현의 피치를 정하면 각 현의 프렛 위치에 따른 피치는 자동적으로 결정된다. 예를 들어 표준 조율법(standard tuning)으로 조율된 6번현의 경우 개방현은 E, 첫 번째 프렛은 F, 두 번째 프렛은 F#의 순서로 피치가 자동 결정된다. 그러나 가야금의 안족은 이러한 프렛과 달리 특정 피치를 내기 위한 위치가 고정되어 있지 않으며 구조적으로도 현침에서 학슬까지 안족이 현을 받칠 수 있는 곳이라면 어디든 위치할 수 있다. 따라서 안족은 프렛과 같이 위치에 따른 고정된 피치의 차이가 없다. 게다가 산조 가야금의 경우 조율을 위한 기준음도 연주자에 따라 다를 수 있다.[4]
| |
(a) | |
|
|
(b) | (c) |
Fig. 1. Sanjo Gayageum and Anjok: (a) Top view of the Gayageum (b) Anjoks supporting each string (c) Anjok. | |


어떤 악기의 조율 시스템을 디지털 도파관 합성 모델에서 표현하고자 한다면, 해당 악기의 조율법과 그 결과를 먼저 알아야 한다. 기타와 가야금을 비교해보면, 기타의 경우 특정 피치의 음을 내기 위해 현을 먼저 결정하고 이후 프렛의 위치를 결정할 것이다. 왜냐하면 하나의 현이 낼 수 있는 음역은 프렛의 개수에 의해 제한되고 피치는 간단한 계산으로구할 수 있기 때문이다. 이에 비해 가야금은 안족의 위치에 따라 피치가 결정되므로 각각의 현에 대하여 안족의 위치에 따른 피치의 변화를 계산할 수 있는 시스템이 필요할 것이다. 가야금의 안족에 대해서는 전달 함수[5]와 조율을 위한 안족 모델[6]에 관한 연구가 있었다. 이에 본 논문에서는 우리나라 전통 현악기 중 안족을 사용하는 악기의 물리적 모델링에 필요한 안족 모델, 특히 조율 기능에 대해 살펴볼 것이다.
II. 주파수 모델링
|
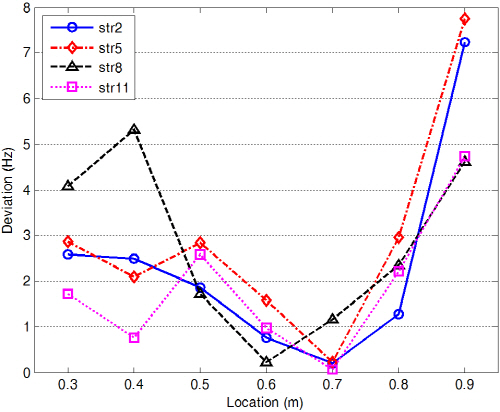
Fig. 2. Absolute deviation between measured frequencies and calculated frequencies by previous method. |
2.1 기존 연구
디지털 도파관 합성법을 이용한 가야금의 물리적 모델링에서 현의 모델에 안족의 조율 기능을 추가한 연구가 이미 발표되었다.[6] 그 연구에서는 안족의 위치에 따른 기본 주파수의 변화를 수식화하기 위하여 주파수 적합성, 장력 적합성, 리키 적분기를 이용한 적합성을 이용하였고 각각의 성능을 비교한 결과, 리키 적합성을 이용했을 때 변수의 수도 적고 성능 면에서 가장 우수하다고 기술하고 있다.[6] 하지만 이 모델의 단점은 Fig. 2에서 보인바와 같이 실험에 사용된 모든 현의 가장 낮은 기본 주파수(0.9지점)에서 오차가 최대가 된다는 것인데, 특히 5번현(124.11 Hz)의 경우 그 크기가 7.75 Hz나 된다. 이 오차는 디지털 도파관 합성법을 이용한 모델링의 역 필터링(inverse filtering)에 의한 여기신호(excitation signal) 생성[7] 과정에서 원 신호의 배음을 제대로 제거하지 못하는 심각한 문제를 야기한다.
가야금의 각 현에 대해 안족의 위치에 따른 기본 주파수 변화는 식(1)과 같이 계산된다.[6]
 ,
,여기서  로서 안족의 위치를 나타내며
로서 안족의 위치를 나타내며  는 안족의 위치에 따른 주파수의 변화를 측정할 때 사용된 안족의 최소 이동 거리이고
는 안족의 위치에 따른 주파수의 변화를 측정할 때 사용된 안족의 최소 이동 거리이고  는
는  번 현에 대한 파라미터이다. 이 파라미터는 1차 리키 적분기에 의해 더해진 주파수를 선형 회귀(linear regression) 모델로 근사화할 때 얻어진 값으로 물리적으로는 현의 장력과 관련 있는 값이다. 안족의 위치는 모든 현에 공통이므로 각 현에 대한
번 현에 대한 파라미터이다. 이 파라미터는 1차 리키 적분기에 의해 더해진 주파수를 선형 회귀(linear regression) 모델로 근사화할 때 얻어진 값으로 물리적으로는 현의 장력과 관련 있는 값이다. 안족의 위치는 모든 현에 공통이므로 각 현에 대한  값이 주어진 식의 정확도를 결정한다.
값이 주어진 식의 정확도를 결정한다.
안족 모델 설계에 사용된 1차 리키 적분기는 식(2)와 같다.
 ,
,여기서  으로서 안족의 위치에 따른 기본 주파수
으로서 안족의 위치에 따른 기본 주파수  의 누적 주파수를 의미하고
의 누적 주파수를 의미하고  은 리키 적분기의 계수를 나타낸 것이다.
은 리키 적분기의 계수를 나타낸 것이다.  값은 리키 적분기 출력의 선형 회귀 모델을 통해 얻어지므로 결국 식(1)의 정확도는 최적의 리키 적분기 계수를 선택하는 문제와 같다.
값은 리키 적분기 출력의 선형 회귀 모델을 통해 얻어지므로 결국 식(1)의 정확도는 최적의 리키 적분기 계수를 선택하는 문제와 같다.
1차 리키 적분기 출력에 사용한 선형 회귀 모델은 식(3)과 같다.
 ,
,여기서  로서 안족의 위치에 대한 로그 값이며
로서 안족의 위치에 대한 로그 값이며  는 오차항,
는 오차항,  와
와  은 각각 누적 주파수에 대한 절편(intercept)과 기울기(slope)이다. 최종적으로 안족의 위치에 따른 주파수를 계산하기 위해서는 1차 미분기를 통과[6]해야 하므로
은 각각 누적 주파수에 대한 절편(intercept)과 기울기(slope)이다. 최종적으로 안족의 위치에 따른 주파수를 계산하기 위해서는 1차 미분기를 통과[6]해야 하므로  와
와  는 사라지고
는 사라지고  만 남는다.
만 남는다.
2.2 제안하는 방법
기존 방법에서는 안족의 모든 위치에 대해 리키 적분기의 계수를 1로 고정하였고 또한, 안족의 위치와 기본 주파수와의 관계를 단순히 지수함수로 가정하였기 때문에 Fig. 2와 같이 특정 위치에서 오차가 크게 발생하는 문제가 있었다. 이를 개선하기 위해 본 논문에서는 다음과 같이 제안한다.
첫째, 안족의 위치와 기본 주파수와의 관계를 하나의 지수함수로 가정하지 않고, 구간별 독립적인 지수함수의 조합으로 가정한다. 따라서 안족의 위치를 세부 구간으로 나누고 각 구간 내 누적 주파수에 대한 선형 회귀 모델을 적용한다.
둘째,  을 유한한 범위로 설정한 후 안족 위치의 세부 구간 내 위치별 각 현의 기본 주파수와 식(1) 간의 RMSE가 최소가 되는
을 유한한 범위로 설정한 후 안족 위치의 세부 구간 내 위치별 각 현의 기본 주파수와 식(1) 간의 RMSE가 최소가 되는  의 값을 찾는다. 이는 각 현에 대한 최적의
의 값을 찾는다. 이는 각 현에 대한 최적의  을 구하는 것과 동일하다. 이 때,
을 구하는 것과 동일하다. 이 때,  의 범위는 각 현의 기본 주파수와 식(1)의 최소 절대 오차가 포함되도록 설정하여야 한다.
의 범위는 각 현의 기본 주파수와 식(1)의 최소 절대 오차가 포함되도록 설정하여야 한다.
제안하는 방법을 적용하면 식(2)는 식(4)와 같이 된다.
 ,
,여기서
그리고  은 안족 위치의 세부 구간으로
은 안족 위치의 세부 구간으로 
 이다.
이다.  은 앞서 정의한
은 앞서 정의한  의 유한 범위 내 원소의 개수이고
의 유한 범위 내 원소의 개수이고  으로 정의한다. 또한 행렬
으로 정의한다. 또한 행렬  의 크기은
의 크기은  로서
로서 
 이다. 같은 방법으로
이다. 같은 방법으로  을 구하면
을 구하면 
 이 되고, 이를 식(1)에 대입하면
이 되고, 이를 식(1)에 대입하면
 ,
,이다. 식(7)은 모든  과 구간내 모든 안족의 위치에 대한 계산된 기본 주파수이다. 따라서 RMSE 계산을 위한 세부 구간 내 원래 기본 주파수는 식(8)과 같이 정의한다.
과 구간내 모든 안족의 위치에 대한 계산된 기본 주파수이다. 따라서 RMSE 계산을 위한 세부 구간 내 원래 기본 주파수는 식(8)과 같이 정의한다.
 ,
,여기서 행렬  의 크기는
의 크기는  이다. 그러므로 안족의 세부 구간
이다. 그러므로 안족의 세부 구간  에서
에서  번째 현에 대한 최적의
번째 현에 대한 최적의  은 식(9)와 같다.
은 식(9)와 같다.
 ,
,여기서,
 .
.III. 실험 및 결과
본 논문에 사용된 데이터는 기존의 연구[6]에서 사용한 데이터와 동일한 것이다. 가야금의 줄은 전문 연주자가 매었으며, 가야금의 2번, 5번, 8번, 11번 현에 대해 안족을 현침으로부터 0.3 m에 위치시키고 0.1 m씩 증가시켜가며 0.9 m까지 이동시켰다. 각 위치에서 단위음을 각각 3번씩 녹음한 후 기본 주파수를 측정하고 이들의 평균을 해당 위치에서의 기본 주파수로 사용하였다.
안족의 세부 구간은 [0.3, 0.4], (0.4, 0.8), [0.8, 0.9]의 세 구간으로 나누었는데, 이는 Fig. 2를 기준으로 오차가 크게 발생하는 지점 또는 오차가 급격히 증가하는 지점을 경계로 나눈 것이다. 1차 리키 적분기의 계수  은 0.99부터 1.02까지의 유한범위로 설정하고 0.0001씩 증가시켰다. 이 범위는 각 현의 기본 주파수와 식(1)의 최소 절대 오차가 포함되도록 설정 된 것이다.
은 0.99부터 1.02까지의 유한범위로 설정하고 0.0001씩 증가시켰다. 이 범위는 각 현의 기본 주파수와 식(1)의 최소 절대 오차가 포함되도록 설정 된 것이다.
 by Eq. (9).
by Eq. (9). )
) )
)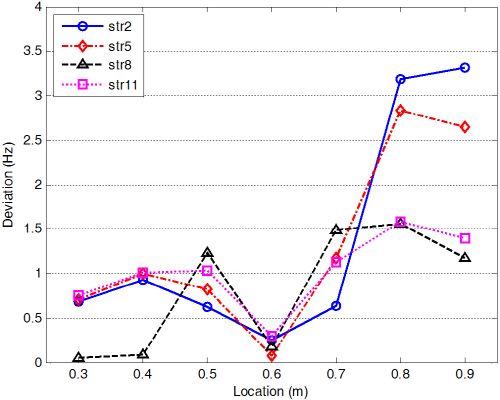
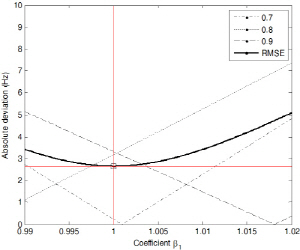
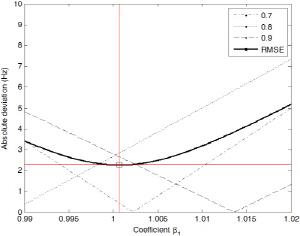
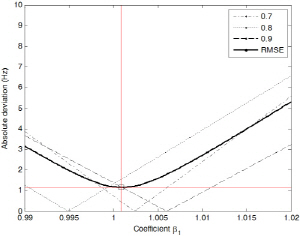
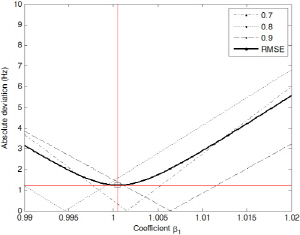
Table 1은 안족의 세부 구간별 각 현의  을 나타낸 것이고 Fig. 3은 Table 1의 결과를 이용하여 구한 기본 주파수와 측정값간의 절대 오차를 나타낸 것이다. Fig. 2와 비교했을 때 안족의 모든 위치에 대해 기존의 결과를 크게 개선하였음을 알 수 있다. 주목할 만한 것은 제안한 방법이 안족의 위치 0.8과 0.9 지점에서 2번, 5번 현의 경우를 제외하고는 모두 대략 1.5 Hz이하의 오차를 보인다는 것이며 또한, 최대 오차의 경우도 약 3배 정도 줄었다는 것이다. 하지만 여전히 [0.8, 0.9] 구간에서 2번, 5번 현의 오차는 각각 3.32 Hz와 2.64 Hz로 다른 값들에 비해 비교적 큰 값을 가진다. 기존의 방법에서도 동일 현, 동일 구간에서 각각 7.25 Hz, 7.75 Hz로 가장 큰 오차를 보였는데 이는 Fig. 4 (a), (b)와 같이 각 안족 위치에 대한 최소 절대 오차를 갖는
을 나타낸 것이고 Fig. 3은 Table 1의 결과를 이용하여 구한 기본 주파수와 측정값간의 절대 오차를 나타낸 것이다. Fig. 2와 비교했을 때 안족의 모든 위치에 대해 기존의 결과를 크게 개선하였음을 알 수 있다. 주목할 만한 것은 제안한 방법이 안족의 위치 0.8과 0.9 지점에서 2번, 5번 현의 경우를 제외하고는 모두 대략 1.5 Hz이하의 오차를 보인다는 것이며 또한, 최대 오차의 경우도 약 3배 정도 줄었다는 것이다. 하지만 여전히 [0.8, 0.9] 구간에서 2번, 5번 현의 오차는 각각 3.32 Hz와 2.64 Hz로 다른 값들에 비해 비교적 큰 값을 가진다. 기존의 방법에서도 동일 현, 동일 구간에서 각각 7.25 Hz, 7.75 Hz로 가장 큰 오차를 보였는데 이는 Fig. 4 (a), (b)와 같이 각 안족 위치에 대한 최소 절대 오차를 갖는  의 값이 너무 다르기 때문이다. 8번과 11번 현의 경우 Fig. 4 (c), (d)에 보는 것과 같이 최소 절대 오차가 대략 [0.995, 1.0075]에서 모두 존재하는 반면, 2번과 5번 현의 경우 안족 위치 0.8에 대해 최소 절대 오차가 모두
의 값이 너무 다르기 때문이다. 8번과 11번 현의 경우 Fig. 4 (c), (d)에 보는 것과 같이 최소 절대 오차가 대략 [0.995, 1.0075]에서 모두 존재하는 반면, 2번과 5번 현의 경우 안족 위치 0.8에 대해 최소 절대 오차가 모두  의 유한 범위를 벗어난다. 이 때문에 RMSE가 최소가 되는 지점에서도 2번과 5번 현은 각각 3.32 Hz와 2.64 Hz의 큰 오차를 갖는 것이다. 그러나 이는 측정 데이터의 본질적인 특징이므로 다른 오차 추정법을 사용한다 하더라도 해결할 수 없는 문제이다. 이러한 이유로 [0.8, 0.9]구간에 대해서는 오차를 줄이기 위해 실제 [0.7, 0.9]의 구간에 선형 회귀 모델을 적용하여 최적의
의 유한 범위를 벗어난다. 이 때문에 RMSE가 최소가 되는 지점에서도 2번과 5번 현은 각각 3.32 Hz와 2.64 Hz의 큰 오차를 갖는 것이다. 그러나 이는 측정 데이터의 본질적인 특징이므로 다른 오차 추정법을 사용한다 하더라도 해결할 수 없는 문제이다. 이러한 이유로 [0.8, 0.9]구간에 대해서는 오차를 줄이기 위해 실제 [0.7, 0.9]의 구간에 선형 회귀 모델을 적용하여 최적의  을 구하였다. 하지만, 기본 주파수를 계산할 때는 Table 1의 구간을 사용한다.
을 구하였다. 하지만, 기본 주파수를 계산할 때는 Table 1의 구간을 사용한다.
IV. 결 론
본 논문에서는 가야금의 물리적 모델링에 필요한 안족 모델, 특히 조율 기능에 해당하는 주파수 모델링에 대해 살펴보았다. 기존의 모델링 방법의 문제점은 낮은 주파수에서 오차가 크게 발생한다는 것이었다. 이를 개선하기 위하여 모델링을 위한 세부구간 설정, 그리고 각 구간에서 RMSE가 최소가 되는 1차 리키 적분기 계수를 찾음으로써 각 현에 대한 최적의 파라미터를 구하는 방법을 제안하였다. 제안한 방법은 모든 현, 모든 구간에서 기존의 결과보다 월등히 향상되었으나 [0.8, 0.9] 구간에서 여전히 비교적 큰 오차를 보였다. 이는 측정 데이터의 본질적인 특징으로 인한 것인데, 향후 많은 가야금으로부터 데이터를 취득하여 더욱 일반화된 모델링 기법을 개발할 수 있어야 할 것이다.
