

I. 서 론
II. 이론적 배경
III. 무지향 모드와 쌍극자 모드에 의한 심장형 빔 패턴 설계
IV. 무지향, 쌍극자, 4극자 모드에 의한 심장형 빔 패턴 설계
V. 유한요소법에 의한 링 센서의 빔 패턴 해석
VI. 구조변수에 따른 성능 변화 분석
VII. 결 론
 I. 서 론
I. 서 론
수중 음향 트랜스듀서 중 수신용으로 가장 널리 사용되는 종류 중의 하나가 압전형 링 센서이다. 링 트랜스듀서의 동작 원리는 압전 재료로 이루어진 링에 전압을 인가하면 링 전체적으로 원주방향으로 진동하면서 무지향성의 방사특성을 가진다.[1-2] 이러한 링 트랜스듀서는 센서로 사용 시 원주상의 어느 방향에서나 음압을 받아들이기 용이한 무지향성을 가지지만, 동시에 음압의 크기만 측정할 뿐 외부에서 들어오는 음압의 방향은 파악할 수 없는 한계가 있다.
통상 음원의 방향을 탐지하기 위해서는 다수의 스칼라 센서를 나열한 배열 구조를 이용해 각 센서에 도달하는 음향 신호의 시간 지연차에 따른 음원의 방위각, 고각, 거리를 추정하는 방법을 사용하거나[3-4] 또는 음향 신호의 입사각을 추정하는 빔 형성 기법 등을 이용한다.[5] 하지만 이들 방법은 많은 수의 센서를 필요로 하므로 센서 구조뿐만 아니라 이를 운용하는 시스템도 복잡해지는 어려움이 있다. 이러한 문제점을 해결할 수 있는 방안으로 벡터 센서에 대한 연구를 들 수 있다. 벡터 센서란 하나의 패키지로 구성된 구조로 음압의 크기 뿐 아니라 음원의 방향도 동시에 측정할 수 있는 센서이다.[6] 링 트랜스듀서를 이용한 벡터 센서는 작동 원리에 따라 다양한 구조를 가질 수 있는데, Gordon이 링 센서를 2조각낸 경우를 등가회로로 나타내 센서의 쌍극자 모드에 관한 연구를 한 이후로[7] Cohick은 자왜재료를 이용한 링 센서를 4조각 낸 다음 쌍극자 모드를 구현한 연구를 했었다.[8] 최근에는 링 센서를 8조각 낸 다음 이것들을 적절히 조합하여 다중 모드를 구현해 외부 음원의 방향을 찾는 연구가 있다.[9] 작동 원리는 외부 음원이 들어왔을 때 조각난 8개의 세라믹에서 출력 전압을 받아들이는데, 이 8개의 출력전압을 모두 합하면 링 센서의 기본 모드인 무지향성 모드로 외부 음원의 크기를 알 수 있게 된다. 그리고 조각난 8개의 세라믹을 4개씩 나누어 조합하면 쌍극자 모드를 구현 할 수 있는데, 이것으로 외부 음원의 방향을 알 수 있게 된다. 하지만 쌍극자 모드의 경우 양 방향 구분이 모호하다는 단점이 있다. 이를 해결하기 위한 방안으로 수신 방향과 그 반대 방향 간의 감도 차가 커 음원의 양 방향 구분이 용이하다고 알려진 심장형(cardioid) 빔 패턴을 만드는 방법이 제시된 연구도 있다.[10] 나아가 쌍극자에 4극자 모드까지 추가하여 벡터 센서의 빔 특성을 향상시키는 연구도 있다.[11-12] 하지만 이러한 센서들은 내부 압전소자들의 공진 모드를 이용하는 것으로 사용 주파수 대역이 제한적이라는 문제를 가지고 있다.
이에 본 논문에서는 단일 링 센서를 이용하여 벡터 센서를 구현하되, 기존 탐지 방법의 문제점을 해결할 수 있도록 공진 주파수보다 월등히 낮은 주파수에서 심장형 빔 패턴을 구현하여 외부 음압의 크기와 방향을 동시에 탐지하는 방법에 대해 연구하였다. 우선 벡터 링 센서의 특성 해석을 위하여 링 센서가 2차원 평면상에 8개의 수신점으로 구성되어 있다고 가정한 다음, 수신 빔 특성을 나타낼 수 있는 이론식을 유도하였다.[1] 유도된 식을 이용하여 -3 dB 빔 폭이 가장 좁고 수신 방향과 그 반대 방향 간의 감도 차가 가장 큰 심장형 빔 패턴을 구현하기 위한 방안을 도출하고, 무지향 모드와 쌍극자 모드에 4극자 모드를 추가로 더하여 빔 패턴을 계산했다. 나아가 유도된 식을 이용하여 확실한 방향성을 나타내기 위해 빔 폭이 좁고, 수신 방향과 그 반대쪽 간의 감도차가 큰 심장형 빔 패턴을 구현하기 위한 다중 모드의 결합 방안을 도출하였다. 이론식으로 계산된 결과의 타당성은 동일한 경우들에 대한 유한요소 해석 결과와 비교함으로써 검증하였다. 이렇게 구현된 압전 링 벡터 센서에 대해 센서의 반경과 압전 세라믹의 두께 그리고 링의 길이와 같은 구조 변수들의 변화에 따른 감도 변화를 분석함으로써 링 센서의 감도를 향상시킬 수 있는 방안 또한 제시하였다.
II. 이론적 배경
본 연구에서는 링 벡터 센서의 수신 특성 해석을 위하여, 링 센서가 2차원 평면상에 8개의 수신점으로 구성되었다고 가정한 다음 빔 특성을 나타낼 수 있는 이론식을 유도하였다.
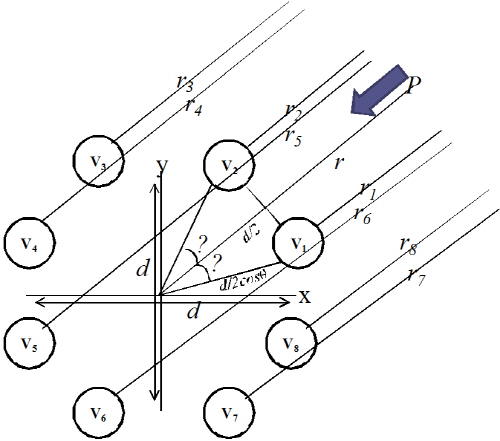
Fig. 1은 8개의 수신점이 2차원 평면상에 거리 d만큼 떨어져있는 배열구조를 나타낸 것이다. V1~V8은 8개의 수신점들의 출력값을 나타낸 것이고, r은 이들의 중점에서 음원까지의 거리이다. ri(i = 1~8)는 각 수신점들의 음원까지의 거리이다. 8개의 수신점들 각각이 외부에서 인가되는 음압 P에 대해 나타내는 반응값은 식(1)~(8)로 표현할 수 있다. 여기서, M은 수신점의 감도,  는 각속도, t는 시간, k는 파수이다.
는 각속도, t는 시간, k는 파수이다.
 ,
, ,
, ,
, ,
, ,
, ,
, ,
, .
.모든 수신점들의 측정거리가 음원으로부터의 현격히 크다는 원거리 조건을 만족한다면, 각 수신점들의 음원까지의 거리는 
 로 근사화가 될 수 있고 식(9)~(16)처럼 나타낼 수 있다.[13] 여기서 a는 음원의 반경, λ는 파장이다.
로 근사화가 될 수 있고 식(9)~(16)처럼 나타낼 수 있다.[13] 여기서 a는 음원의 반경, λ는 파장이다.
|
(a) Omni mode |
|
(b) Dipole mode |
|
(c) Quadrupole mode |
Fig. 2. Combination method for the multimode imple-mentation of the ring sensor. |
 ,
, ,
, ,
, ,
, ,
, ,
, ,
, .
.식(9)~(16)을 식(1)~(8)에 각각 대입하면 각 수신점들의 반응 V1~V8는 식(17)~(24)로 나타낼 수 있다.
 ,
, ,
, .
. ,
, ,
, ,
, ,
, ,
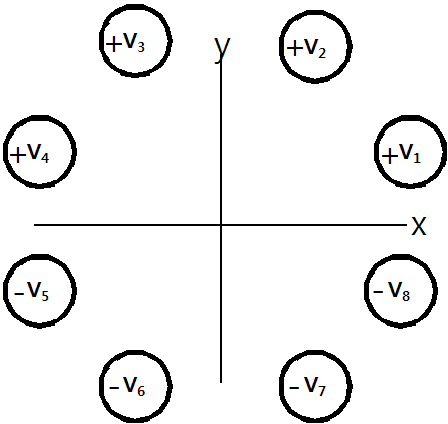
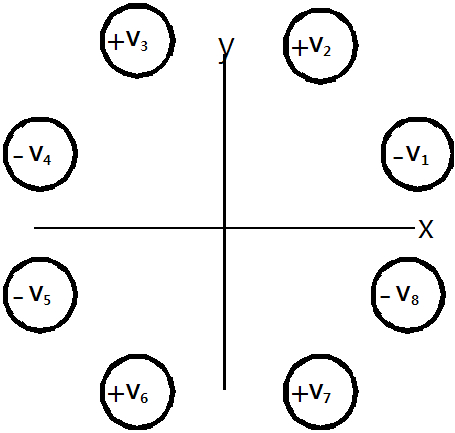
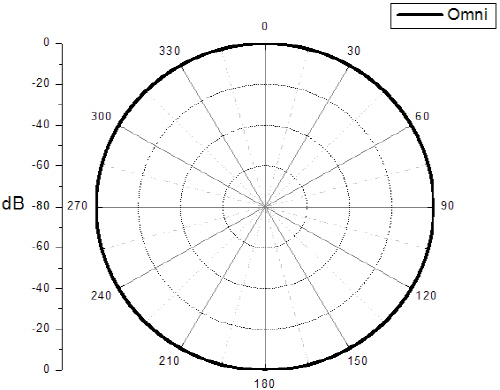
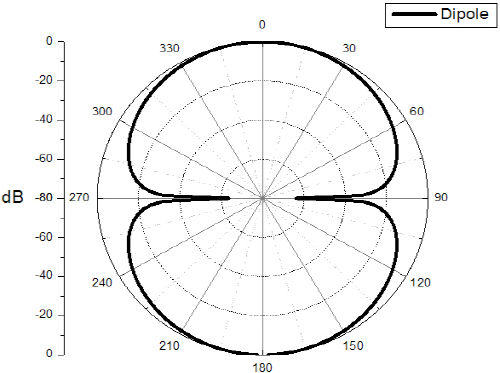
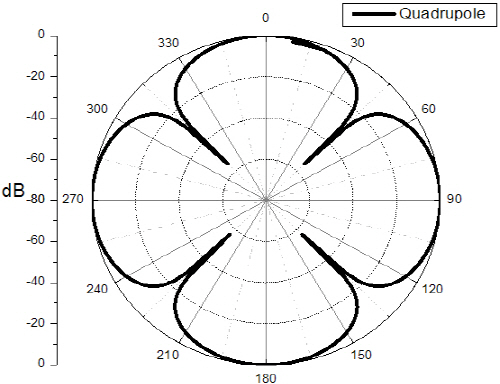
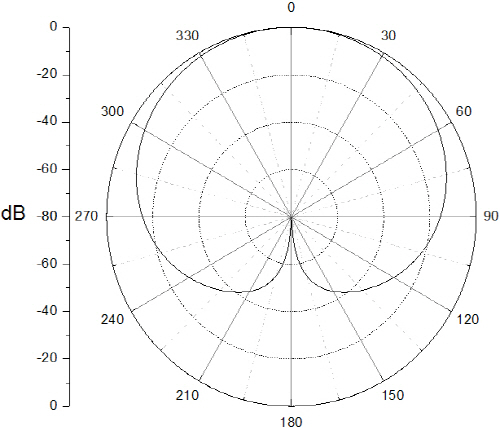
,이 식들을 이용해 8개의 수신점들을 조합하면 다양한 모양의 빔 패턴을 만들 수 있다. 우선 무지향 모드는 Fig. 2(a)에 보이는 것처럼 V1+V2+V3+V4+V5+V6+ V7+V8 와 같은 조합으로 8개 수신점들의 부호를 모두 동일하게 묶어서 구현할 수 있다. 다음으로 쌍극자 모드는 Fig. 2(b)의 V1+V2+V3+V4-(V5+V6+V7+V8) 와 같이 수신점들을 4개씩 2개의 그룹으로 묶은 다음 두 그룹의 부호를 서로 반대로 하여 구현할 수 있다. 세 번째 4극자 모드는 Fig. 2(c)에 보인 바와 같이 –V1+V2+V3-V4-V5+V6+V7-V8 로 구성하면 된다. 각 모드 조합에 대해 수식을 이용하여 계산한 빔 패턴 결과를 Fig. 3에 나타냈다. 계산 시 주파수는 800 Hz이다. Fig. 3(a)는 무지향 모드 빔 패턴, (b)는 쌍극자 빔 패턴, (c)는 4극자 모드 빔 패턴이다.
III. 무지향 모드와 쌍극자 모드에 의한 심장형 빔 패턴 설계
본 연구에서는 기본적으로 무지향성의 빔 특성을 가지는 링 센서를 이용해 방향성을 가지는 벡터센서를 구현하기 위해, Fig. 3에 보인 다중 모드들의 빔 패턴 조합을 이용했다. 벡터센서로 사용되기 위해서는 음원의 방향 구분이 용이해야하는데, 일반적으로 수신 방향과 그 반대쪽 간의 감도 차가 클수록 양 방향의 구분이 용이해 지고, 빔 폭이 좁을수록 음원의 방향 분해능이 좋아진다. 그래서 링 센서를 이용해 수신 방향 구분이 용이하고 분해능이 좋은 심장형 빔 패턴을 구현하기위해, 무지향 모드와 쌍극자 모드의 조합으로 빔 패턴을 구성하였다. 심장형 빔 패턴은 식(25)와 같이 표준화된 무지향 모드와 표준화된 쌍극자 모드의 합으로 나타낼 수 있는데, 식에서 Omninorm은 무지향 모드일 때의 빔 패턴을 그 최대 수신감도에 대해 정규화한 값이고, Dipolenorm은 쌍극자 모드일 때의 빔 패턴을 그 최대 수신감도에 대해 정규화한 값이다. 이때 표준화를 하는 이유는 무지향성 모드의 수신 감도가 쌍극자 모드의 감도보다 우세하기 때문에 두 모드간의 감도 크기를 같게 하기 위함이다.
 .
.Fig. 4는 식(25)에 의해 표준화된 무지향 모드와 표준화된 쌍극자 모드의 결합을 통해 만들어진 심장형 빔 패턴의 예시이다. 실선(-)으로 표시된 부분은 표준화된 무지향 모드와 표준화된 쌍극자 모드간의 결합이 1:1인 경우로 -3 dB 빔 폭이 122o이고 ∆Asen이 1.02이다. 여기서 ∆Asen은 Fig. 4의 빔 패턴에서 0° 방향 반원내의 빔 패턴 면적과 180° 방향 반원내의 빔 패턴 면적의 차이로 정의하였고, 이 값이 크다는 것은 전면 반원 방향으로 상대적으로 더 높은 감도를 가지는 것을 의미한다. 이렇게 무지향 모드와 쌍극자 모드를 결합할 때 기본 1:1로 조합하는 것보다 -3 dB 빔 폭이 더 좁고 수신 방향과 그 반대 쪽 간의 감도 차가 더 큰 빔 패턴을 얻기 위해, 식(26)과 같이 표준화된 쌍극자 모드에 가중치 α를 부여했다.
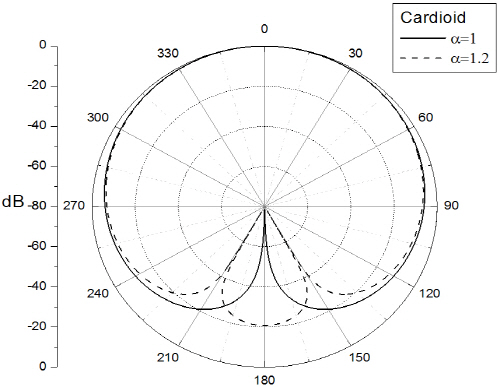
 ,
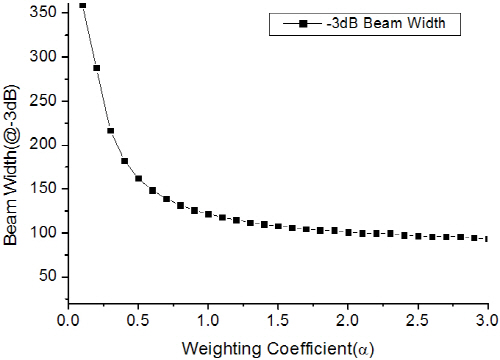
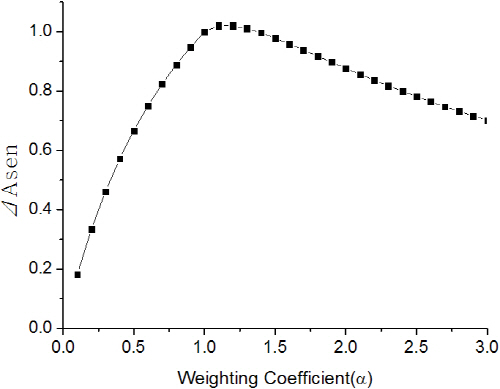
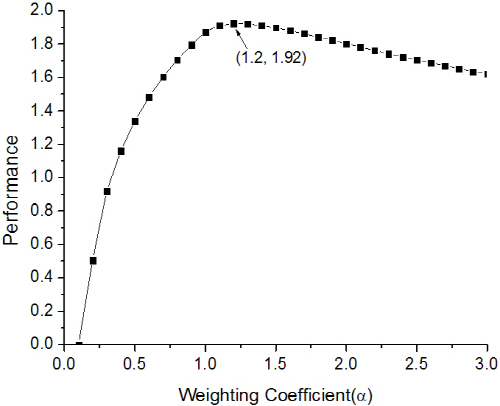
,가중치 α의 영향을 분석하기 위해 그 값을 0에서 3까지 0.1 단위로 변화시키며, 그때의 -3 dB 빔 폭과 ∆Asen의 변화를 Fig. 5에 나타냈다. Fig. 5(a)의 결과 α 값이 증가 할수록 -3 dB 빔 폭이 좁아지는 것을 알 수 있다. Fig. 5(b)의 결과 α 값이 0.1에서 1.1까지 증가할수록 ΔAsen는 증가하다가 1.2부터 다시 감소하는 경향을 보였다. Fig. 5(a)와 (b)의 결과를 이용해 -3 dB 빔 폭도 좁으면서 ΔAsen의 값도 가장 큰 가중치 값을 찾기 위해 식(27)과 같이 performance라는 성능지수를 설정하여 분석하였다. 식(27)에서 BW는 -3 dB 빔 폭을 나타내고, BWmin과 BWmax는 가중치 α의 분석 범위 내에서의 빔 폭의 최소값과 최대값을 각각 나타낸다. 그리고 ΔAsenmin과 ΔAsenmax는 가중치 α의 분석 범위 내에서의 감도차의 최소값과 최대값을 각각 나타낸다. 성능지수 performance를 이루는 두 개의 항목 중에서 빔 폭에 관련된 항은 -3 dB 빔 폭이 좁아질수록 1에 가까운 값을 나타내고, 감도차에 관련된 항은 수신 방향과 그 반대 쪽 간의 감도차가 클수록 1에 가까운 값을 나타낸다. 그러므로 두 경우의 합인 performance값은 최대값 2 이하에서 값이 클수록 -3 dB 빔 폭이 더 좁고 수신 방향으로 높은 감도를 가진다는 두 조건을 잘 만족하는 결과를 낸다. 가중치 α의 값에 따른 performance의 변화는 Fig. 5(c)에 나타내었다. 이 결과로 부터 가중치 α가 1.2인 경우 가장 큰 performance값 1.92를 얻을 수 있었다. 가중치 α가 1.2일 때의 심장형 빔 패턴은 Fig. 4에 점선(…)으로 나타냈다. 이때 -3 dB 빔 폭은 114o 이고, ∆Asen은 1.02이다.

 .
.IV. 무지향, 쌍극자, 4극자 모드에 의한 심장형 빔 패턴 설계
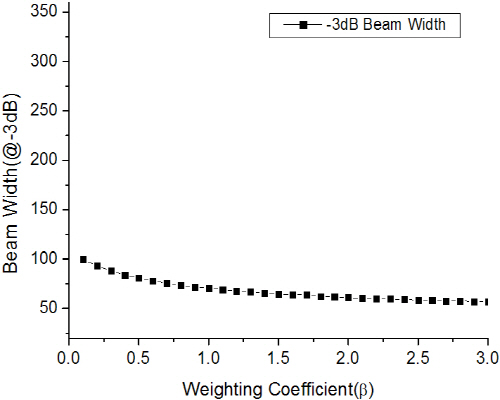
다음으로 앞 절에서 나타낸 무지향 모드 + α×쌍극자 모드보다 -3 dB 빔 폭이 더 좁고 수신 방향과 그 반대 쪽 간의 감도 차가 더 큰 빔 패턴을 구현하기 위해, 빔 패턴을 조합하기 위한 다중 모드에 4극자 모드를 추가로 이용했다. 모드 조합은 식(28)처럼 표준화된 무지향 모드를 기본으로 두고 표준화된 쌍극자 모드 그리고 4극자 모드에 각각 가중치 α와 β를 인가했다.
 ,
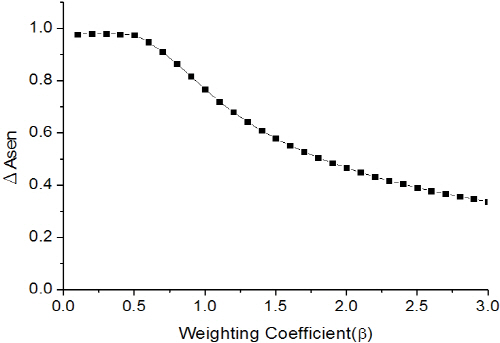
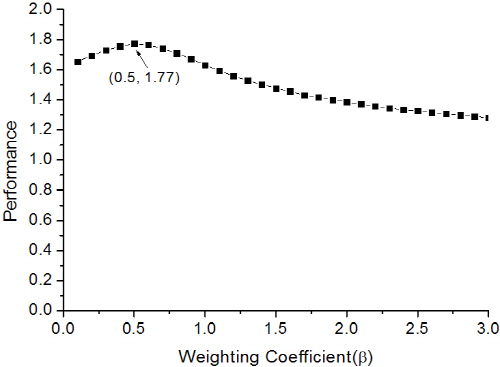
,가중치 α를 0.1~3까지 0.1단위로 변화시켰고, 가중치 β도 0.1~3까지 0.1단위로 변화시켜가면서 계산했다. 이때의 -3 dB 빔 폭 그리고 수신 방향과 그 반대 쪽 간의 감도 차 변화 결과를 Fig. 6에 나타냈다. 계산 결과의 예시로서 Fig. 6(a)는 가중치 α가 1.5일 때, 가중치 β의 변화에 따른 -3 dB 빔 폭 변화를 나타낸 것이다. -3 dB 빔 폭은 β가 0.1일 때 100o로 최대값을 나타냈으며, β가 증가 할수록 빔 폭이 좁아져 β가 3일 때 57o의 최소값을 나타냈다. Fig. 6(b)는 가중치 α가 1.5일 때 β 변화에 따른 수신 방향과 그 반대 방향 간의 감도 차를 나타내는 ΔAsen의 변화를 나타낸 것이다. ΔAsen 값은 β가 0.3인 경우 0.98로 최대값을 가지고, β가 3인 경우 0.34로 최소값을 가진다. 이상과 같은 결과들을 바탕으로 식(27)을 이용해 계산한 performance결과를 Fig. 6(c)에 나타냈다. 가중치 α=1.5, β=0.5일 때 performance 값으로 최대인 1.77을 얻을 수 있었다. 이 때의 빔 패턴은 Fig. 7과 같고, -3 dB 빔 폭은 81o이고 ΔAsen은 0.97이다. 이상과 같이 세 가지 모드를 이용한 빔 패턴과 3절의 두 가지 모드를 이용한 결과를 비교해보면, 무지향 모드와 쌍극자 모드만을 조합했을 때 가장 높은 performance 값을 나타내고, 4극자 모드를 이용한 빔 패턴은 별다른 개선점이 없는 것으로 나타났다. 따라서 이후의 내용에서는 무지향 모드와 쌍극자 모드만을 조합해 구성한 심장형 패턴에 대해 연구하였다.
V. 유한요소법에 의한 링 센서의 빔 패턴 해석
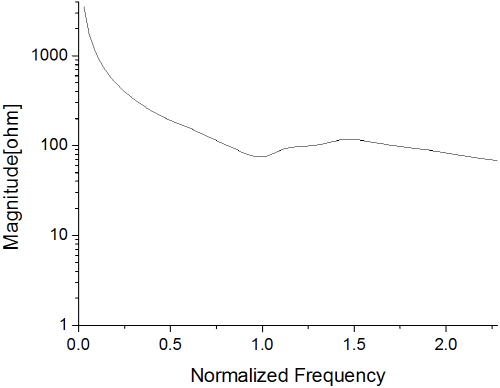
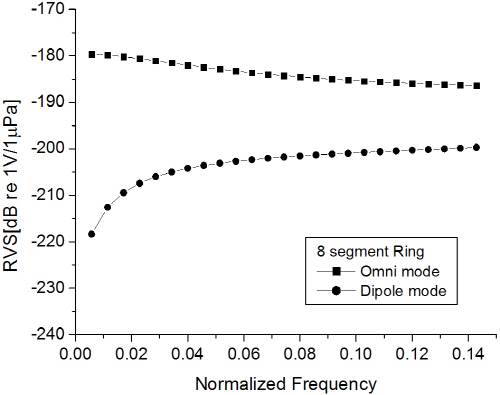
본 절에서는 이상에서 이론식을 이용해 구한 다중 모드 링 센서의 빔 패턴 특성들의 타당성을 검증하고, 다중 모드 링 센서의 감도를 향상시키기 위한 방안을 도출하고자 한다. 먼저 Fig. 1에 보인 링 센서의 수신 특성 구조를 유한요소법을 이용해 나타내고 그 결과를 3절의 결과와 비교해 봄으로써 해석 결과의 신뢰성을 확인하였다. 해석에는 상용 유한요소 해석 프로그램인 ANSYS를 이용했다. Fig. 8에 보인 유한요소 모델에서 링의 세라믹을 8 조각내고 링의 안쪽을 접지시킨 다음, 8 조각 각각의 세라믹 바깥 면에서의 외부 음압에 대한 출력 전압 V1, V2, V3, V4, V5, V6, V7, V8을 계산했다. Fig. 8에 나타낸 링 세라믹의 각 부분 치수는 Table 1에 나타냈으며, 사용된 세라믹은 PZT-4이다. 수중에서의 특성을 해석할 수중 모델은 센서 구조체, 물, 물과 구조체간의 경계층으로 구성하였다. 구조체 표면에서 원거리 장( )까지 물을 그렸으며 물의 최 외곽 지점에서 구조체를 향해 음압을 발생시켰다. 이때 파장은 정규화된 주파수 2.25를 기준으로 계산했다. 센서의 경계조건은 자유 상태로 설정하였으며, 물의 최 외곽 층은 무반사 조건을 적용하였다. Fig. 8에 보인 모델의 수중 임피던스 해석 결과는 Fig. 9에 나타냈으며, RVS(Receiving Voltage Response) 스펙트럼은 Fig. 10에 나타냈다. 링의 무지향 모드에 대한 수 중 공진주파수는 35kHz 이다. 무지향 수신 모드는 주파수에 따라 감도에 큰 변화가 없으나, 전반적으로 감소하는 경향을 보였다. 쌍극자 모드는 주파수에 따라 상대적으로 큰 폭으로 증가하는 경향을 나타내었다.
)까지 물을 그렸으며 물의 최 외곽 지점에서 구조체를 향해 음압을 발생시켰다. 이때 파장은 정규화된 주파수 2.25를 기준으로 계산했다. 센서의 경계조건은 자유 상태로 설정하였으며, 물의 최 외곽 층은 무반사 조건을 적용하였다. Fig. 8에 보인 모델의 수중 임피던스 해석 결과는 Fig. 9에 나타냈으며, RVS(Receiving Voltage Response) 스펙트럼은 Fig. 10에 나타냈다. 링의 무지향 모드에 대한 수 중 공진주파수는 35kHz 이다. 무지향 수신 모드는 주파수에 따라 감도에 큰 변화가 없으나, 전반적으로 감소하는 경향을 보였다. 쌍극자 모드는 주파수에 따라 상대적으로 큰 폭으로 증가하는 경향을 나타내었다.
| ||
| ||
Fig. 8. Finite element model of the multimode ring sensor. | ||
Table 1. Size of the multimode ring sensor. | ||
Radius (R0) [mm] | Ceramic thickness (t) [mm] | Length (l) [mm] |
12.7 | 1.0 | 50.8 |
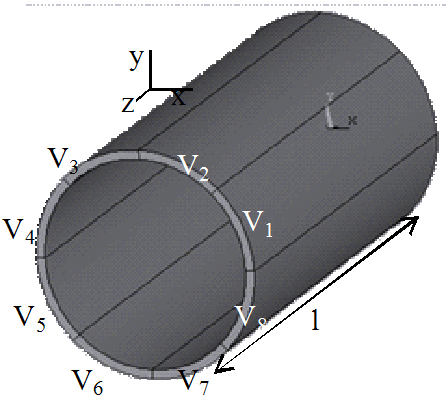
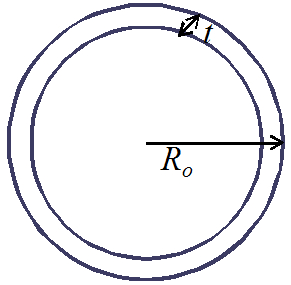
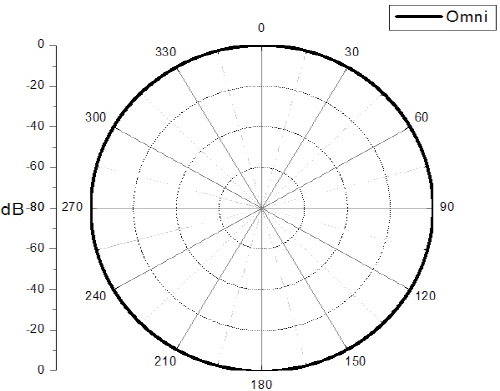
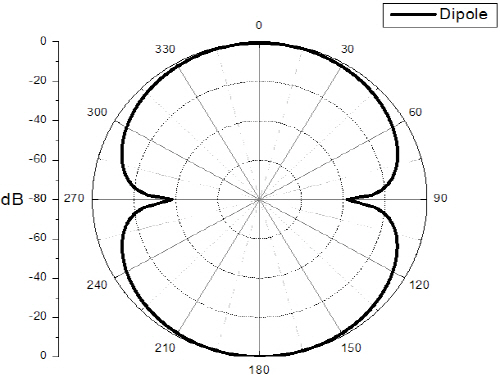
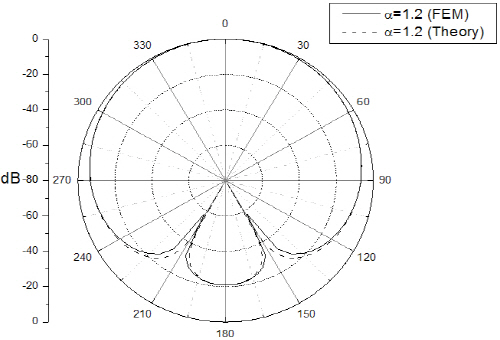
Fig. 11은 Fig. 8에 나타낸 다중모드 링 센서에 대해 800Hz에서 계산한 θ방향(x-y 평면) 수신 빔 패턴이다. Fig. 11(a)는 8개 세라믹의 출력 전압을 모두 더한 후 최대 출력 전압으로 표준화한 빔 패턴이다. 링 센서의 기본 모드인 무지향성 빔 패턴을 나타내고 있다. Fig. 11(b)는 8개 세라믹의 출력 전압 값을 쌍극자 조합으로 구성한 후 그 최대 출력 전압으로 표준화한 빔 패턴이다. Fig. 12는 Fig. 11에 나타낸 표준화된 무지향 모드 결과와 표준화된 쌍극자 모드 결과를 합하고 앞서 이론식에서 도출한 가중치 α로 1.2를 적용한 경우의 심장형 빔 패턴이다. 유한요소 해석 결과 수식을 이용하여 구한 Fig. 4와 Fig. 12의 빔 패턴 결과가 충분한 정확도로 같은 경향을 보이는 것을 확인할 수 있다. 따라서 2절에서 구한 이론식을 이용해서 구한 빔 패턴이 타당함을 검증하였고, 이후 유한요소해석을 통한 계산 결과를 신뢰할 수 있음을 확인하였다.
VI. 구조변수에 따른 성능 변화 분석
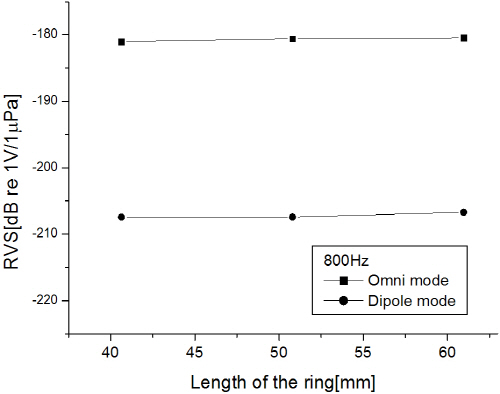
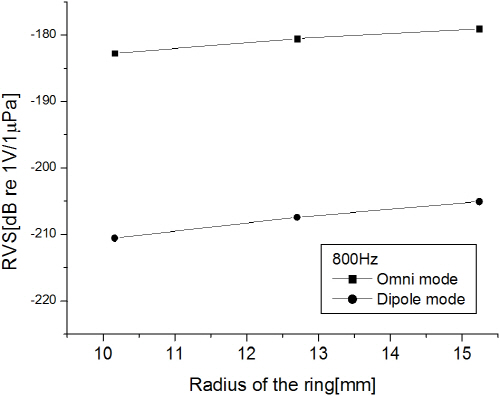
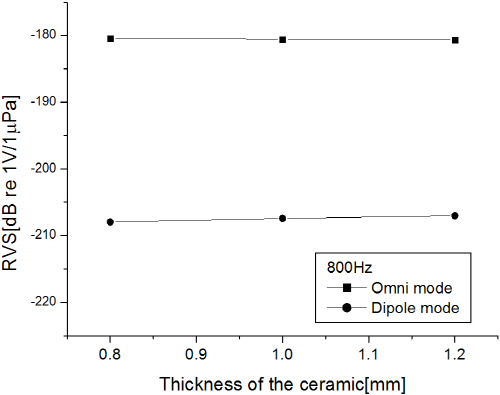
5절에서 검증된 유한요소 모델을 이용해 구조 변수에 따른 링 벡터 센서의 수신 감도 값의 변화를 분석했다. 즉, 링 센서의 경우 성능 변화에 영향을 미칠 것으로 판단되는 링의 반경, 세라믹 두께 그리고 링의 길이를 변화시켜가면서 주파수 800 Hz에서 무지향 모드 그리고 쌍극자 모드의 RVS 값을 계산했다. Fig. 13은 링 벡터 센서의 반경 변화에 따른 무지향 모드와 쌍극자 모드의 RVS 값 변화 경향이다. 전체적으로 링의 반경이 커짐에 따라 각 모드들의 RVS 값이 증가하는 경향을 나타냈다. 이는 링 센서의 전체 크기가 커지면서 수신 면적의 증가로 감도가 상승하였기 때문으로 판단된다. Fig. 14는 세라믹 두께에 따른 각 수신 모드의 RVS 값 변화 경향이다. 세라믹 두께가 커짐에 따라 쌍극자 모드 조합 RVS 값은 조금이나마 증가 하는 경향이지만 무지향 모드 조합의 RVS 값은 감소하는 경향을 보였다. 이는 링의 구조상 8조각의 각 세라믹들이 서로 붙어있는 경계조건을 가지고 있기 때문에 세라믹 두께가 두꺼워 질수록 세라믹 조각들 간의 구속이 강해져 나타나는 현상이라 판단된다. 식(25) 혹은 (26)을 이용해 심장형 빔 패턴을 구현하기 위해서는 두 수신모드 간의 감도 차가 적을수록 유리하다. 따라서 무지향 모드보다 상대적으로 감도가 낮은 쌍극자 모드의 감도를 상승시키는 것이 유리하고, 그러기 위해서는 세라믹 두께를 두껍게 할수록 유리하다. Fig. 15는 링 센서의 길이에 따른 각 수신 모드의 RVS 값 변화 경향이다. 링이 길어질수록 무지향 모드와 쌍극자 모드의 RVS 값이 미미하지만 증가하는 경향을 나타냈다. 이 또한 링 센서의 전체 크기가 커지면서 수신 면적의 증가로 감도가 상승하였기 때문으로 판단된다. 이상의 결과로부터 링 벡터 센서의 감도를 높이기 위해서는 링의 반경을 크게, 세라믹 두께를 두껍게 그리고 링의 길이를 길게 만들수록 유리한 것으로 나타났다. 그 중 링의 반경을 크게 할수록 감도 향상에 좀 더 유리한 것으로 판단된다.
VII. 결 론
본 연구에서는 수중 음향 링 트랜스듀서를 이용해 외부에서 인가되는 음압의 방향을 탐지 할 수 있는 벡터 센서 구조를 제안했다. 음원의 방향을 파악하기 위해 링 센서의 다중 수신 모드를 이용했으며, 표준화된 무지향 모드와 표준화된 쌍극자 모드의 조합으로 심장형 빔 패턴을 구현 할 수 있었다. 이 심장형 빔 패턴을 이용하여 -3 dB 빔 폭을 좁게 그리고 수신 방향과 그 반대 쪽 간의 감도 차를 크게 하기위해 표준화된 쌍극자 모드에 가중치(α=1.2)를 부여했으며, 그 결과 -3 dB 빔 폭은 114o이고, ∆Asen이 1.02인 빔 패턴을 구현할 수 있었다. 나아가 표준화된 4극자 모드를 추가로 조합한 심장형 빔 패턴도 분석을 하였으나 무지향 모드와 쌍극자 모드만을 이용한 빔 패턴에 비해 개선점이 없는 것으로 확인되었다. 그리고, 링 센서의 수신 감도를 높이기 위한 방법으로 설계변수인 링의 반경, 세라믹 두께 그리고 링의 길이를 변화시켜 가면서 센서의 반응을 분석한 결과, 링의 반경은 크게, 세라믹 두께는 두껍게 그리고 세라믹 길이를 길게 만들수록 유리한 것으로 나타났다. 그 중 링의 반경을 크게 할수록 감도 향상에 좀 더 유리한 것으로 판단된다.
