

I. 서 론
II. 접근 방법
2.1 탐지 소리 설계
2.2 반사음 검출 알고리즘
III. 실 험
3.1 데이터베이스 구축
3.2 실험 설정
3.3 결과 및 분석
IV. 잡음 제거 기법에 관한 토의
V. 결 론
I. 서 론
드론은 다양한 센서를 탑재하여 넓은 영역을 탐색할 수 있는 플랫폼으로 모니터링 시스템부터 방송 촬영에 이르기까지 다양한 분야에서 활용된다. 최근, 실내 자율주행에 대한 관심으로, 실내 장애물 회피 기술 이 활발히 개발되고 있다. 기존 광학 센서(RGB 카메라, LiDAR)는 시야 확보가 어려운 저조도, 연기/분진 환경에서 탐지가 제한되고, 투명한 문과 창문 탐지가 어려워, 초음파 기반 탐지 기술이 주목받고 있다.[1,2,3]
Kazan과 Solak은 중형 드론 플랫폼(약 0.23 m 프로펠러)에서 초음파 센서에 기반하여 필터링과 통신 안정화 기법을 통해 장애물 회피 시스템의 탐지 및 회피 성능을 향상하였다.[2] 반면,실험에서 음향 환경과 탐지율, 탐지 한계에 대한 정량적 평가를 확인하기 어렵다.[2] Qiu et al.[3]은 초음파 기반 거리 측정 방식들의 정밀도와 음속 불확실성이 미치는 영향을 분석하였다. Famili et al.[4]은 3차원 공간에서 드론의 정확한 위치 추정을 위해, 주파수 도약 확산 스펙트럼(Frequency Hopping Spread Spectrum, FHSS) 기반 초음파 신호처리 방법을 도입하였지만, 이들은 프로펠러 잡음이 비교적 적은 소형 플랫폼(약 0.06 m 프로펠러)을 활용하였기 때문에, 드론 잡음이 장애물 탐지에 미치는 영향을 분석하는데 한계가 있다. 결론적으로, 기존 연구들을 통해, 드론 환경에서 초음파 센서 기반 장애물 탐지 기술의 실현 가능성을 확인할 수 있지만, 비행에 따른 음향 환경 변화와 탐지율에 관한 분석이 제한되어, 드론에서 초음파 신호처리 기술을 활용하는데 어려움이 있다.
본 논문은 드론에서 프로펠러의 회전 속도에 따른 음향 환경을 분석하고, 박쥐의 생체 소나를 모방하여 드론에 적합한 초음파 탐지 소리를 탐구한다. 실험에서는 중형급 드론 플랫폼(약 0.18 m 프로펠러)과 초음파 센서셋(스피커와 마이크)을 이용하여, 탐지 소리 특성에 따른 탐지율을 제시하고, 결과를 분석한다. 실험 결과, 호버링 및 하강 조건에서 2.0 m 거리에서 최대 약 80 %(f1-score)의 탐지율을 확인할 수 있는 반면, 상승 조건에서는 광대역 잡음 증가로 인해, 초음파 탐지에 한계가 있음을 보여준다. 탐지 소리 별 탐지율 비교를 통해, 드론의 고조파 잡음 대역을 회피하여 탐지 소리 에너지를 분포시킴으로써 강인한 탐지율을 기대할 수 있고, 비행 상태에 따라 선택적인 초음파 탐지 전략이 필요함을 확인할 수 있다.
II. 접근 방법
2.1 탐지 소리 설계
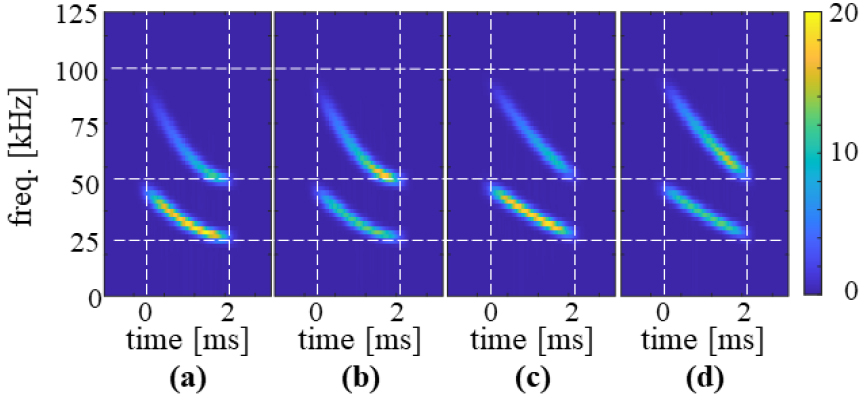
박쥐는 잔향과 잡음이 혼재된 음향 환경에서도 생체 소나를 이용하여 공간을 탐지하고 장애물을 회피한다. 박쥐가 사용하는 탐지 신호(call sound)를 모방하여, 드론 환경에서 적합한 초음파 탐지 신호를 설계한다.[5,6] Fig. 1은 큰갈색박쥐(Eptesicus fuscus)의 탐지 소리에 기반한 네 가지 탐지 신호를 보여준다.[5]
2.1.1 주파수 변조 모델
탐지 소리는 시간에 따라 주파수가 감소하는 하향 주파수 변조(Frequency Modulation, FM) 신호의 합으로 구성된다. 각 FM 요소는 Eq. (1)과 같이 정의된다.
이때, i와 t는 각각 FM 요소와 시간 인덱스를 의미하고, T는 신호 길이를 나타내고, 와 는 각각 주파수와 위상을 의미한다. 주파수는 Eq. (2)와 같이 두 가지 함수로 표현된다.
이때, 과 는 각각 i번째 FM 요소의 시작 주파수와 t=에서 주파수를 나타낸다.
2.1.2 포락선 모델
박쥐의 탐지 소리를 구성하는 FM 요소 중 고주파 대역 요소는 음파 끝에 에너지가 집중된다. 이러한 특징은 Eq. (3)과 같이 모사한다.
이때, 는 평균이 T인 가우시안 윈도우 함수로 분산이 작을수록 탐지 신호 끝에 에너지가 집중된다.
2.1.3 탐지 소리
탐지 소리는 두 FM 요소로 구성된다[Eq. (4)].
이때, 샘플링 주파수: 250 kHz, T = 2 ms, = 50 kHz, = 25 kHz, = 100 kHz, = 50 kHz, = 0, , 에서, FM 요소의 주파수 모델 Eq. (2)와 에너지 분포 비율 𝛼 Eq. (4)에 따라 Call A ~ Call D를 구성한다(Table 1).
Table 1.
Parameter settings for four call sounds.
| Call A | Call B | Call C | Call D | |
| Quadratic | Logarithmic | |||
| 𝛼 | 0.6 | 0.4 | 0.6 | 0.4 |
| *E | 78.64 | 62.59 | 76.95 | 61.35 |
2.2 반사음 검출 알고리즘
2.2.1 정합 필터 기반 후보 추출
탐지 소리 를 템플릿으로 정합 필터를 적용하여 관측 신호 에서 반사 신호 후보를 강조한다. 정합 필터 결과 는 Eq. (5)와 같이 탐지 소리와 관측 신호의 시간 이동 코사인유사도로 산출된다.
이때, 는 각각 크기를 1로 정규화한 템플릿과 [,] 구간의 관측 신호를 의미한다.
2.2.2 CFAR 기반 적응적 임계 검출
드론에서 발생할 수 있는 음향 환경 변화에 강인한 검출을 위해, 환경 변화에도 일정한 오검출율을 기대할 수 있는 Constant False Alarm Rate(CFAR)에 기반하여 Eq. (6)과 같이 반사 신호를 검출한다.
이때, k는 검사 셀 인덱스를 나타낸다. 주어진 오검출률 에 대하여, , 는 검사 셀 주변 훈련 셀로부터 추정한 배경잡음의 통계치를 의미한다. 본 논문에서는 두 가지 CFAR을 통해, Eq. (7)과 같이 를 추정한다.
이때, 와 는 각각 CFAR의 윈도우 길이와 가드셀의 수를 의미한다. R은 관심영역에 포함된 r 값을 원소로 갖는 집합이고, 는 집합 R 의 원소들 중 p번째로 작은 원소를 의미한다().[7]
III. 실 험
3.1 데이터베이스 구축
Fig. 2와 같이 중형 드론(프로펠러 0.18 m) 하부에 초음파 센서셋(스피커 및 마이크)을 설치하고, 투명 아크릴판으로부터의 반사음을 녹음하여 데이터를 수집한다. 이때, Avisoft Bioacoustics 사의 UltrasoundGate CM16/CMPA 초음파 마이크와 Ultrasonic Electrostatic Speaker(ESS16)를 사용한다.
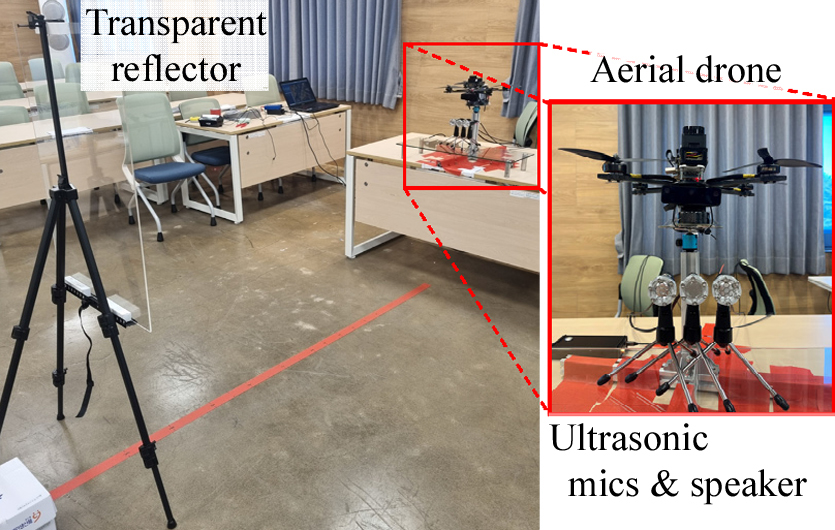
반사판까지 거리는 0.5 m부터 1.0 m까지 0.1 m 간격으로, 1.0 m부터 2.0 m까지 0.2 m 간격으로 총 10가지 거리를 고려한다. 드론의 하강, 호버링, 상승의 세 가지 비행 조건을 고려하여, 각각 모터 최대 출력의 20 %, 40 %, 50 %로 설정한다. 거리와 모터 출력에 대하여 각 조건 별로 약 10 min 간격을 두고 100회씩 녹음하여 데이터베이스를 구축한다.
3.2 실험 설정
평가 지표로 검출 정밀도와 검출률의 조화평균인 f1-score를 사용한다. 각 음향 상황에서 CFAR의 오검출률 를 0.6 %부터 10 %까지 로그 스케일로 7개 값을 적용하여, 최대 f1-score를 기록한다. CFAR에서 은 64, 은 8로 설정하고, OS-CFAR에서 로 설정한다(: 바닥 함수).
3.3 결과 및 분석
3.3.1 드론 음향 환경 분석
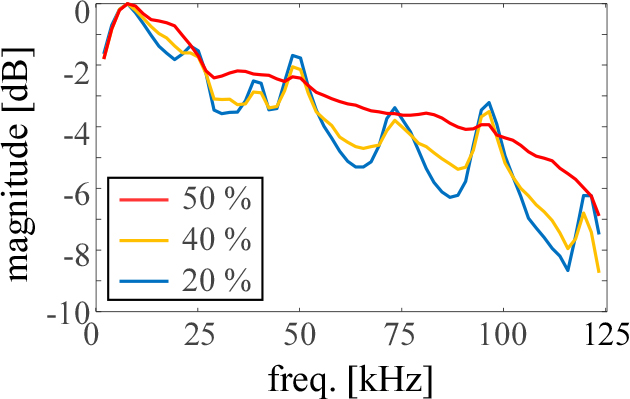
Fig. 3은 1 m 거리에서 모터 출력에 따른 잡음의 스펙트럼을 보여준다. 출력이 20 %, 40 %인 경우, 블레이드 패싱 주파수(Blade Passing Frequency, BPF)와 그 고조파가 명확히 관찰된다. 이때, 고조파는 프로펠러 날개 수와 모터 r/min에 의해 결정된다.[8,9] 반면, 50 % 출력일 때, 전 대역에서 잡음이 크게 증가하여, 고조파 성분이 관찰되지 않는다. 이는 로터 주위 유동 및 난류 강도가 증가하여, 블레이드 후연에서 발생한 경계층 난류와 아래로 밀린 공기가 주변 사물에 반사되어 재유입되는 순환류가 광대역 잡음으로 관찰된다.[10,11]
3.3.2 반사음 및 반사음 검출 결과
Fig. 4는 거리 1 m 상황에서 모터 출력(20 %, 40 %, 50 %)에 따른 관측 신호의 스펙트로그램과 정합 필터 결과 예시를 보여준다. 모터 출력이 20 %, 40 % 조건에서, BPF에 의한 고조파 잡음이 존재할지라도 탐지 소리의 FM 요소가 일부 대역에서 관찰되며, 정합 필터 출력 또한 탐지 소리가 포함된 구간에서 강한 유사도를 확인할 수 있다[Fig. 4(a) ~ (b), (d) ~ (e)]. 반면, 모터 출력이 50 % 조건에서, 난류에 의한 광대역 잡음이 탐지 소리 대역 전반에 관찰되면서 탐지 소리 식별이 어렵다[Fig. 4(c), (f)]. 이때, 정합 필터 출력에서도 유의미한 차이가 없어, 반사음 검출이 어려울 것으로 예상된다.
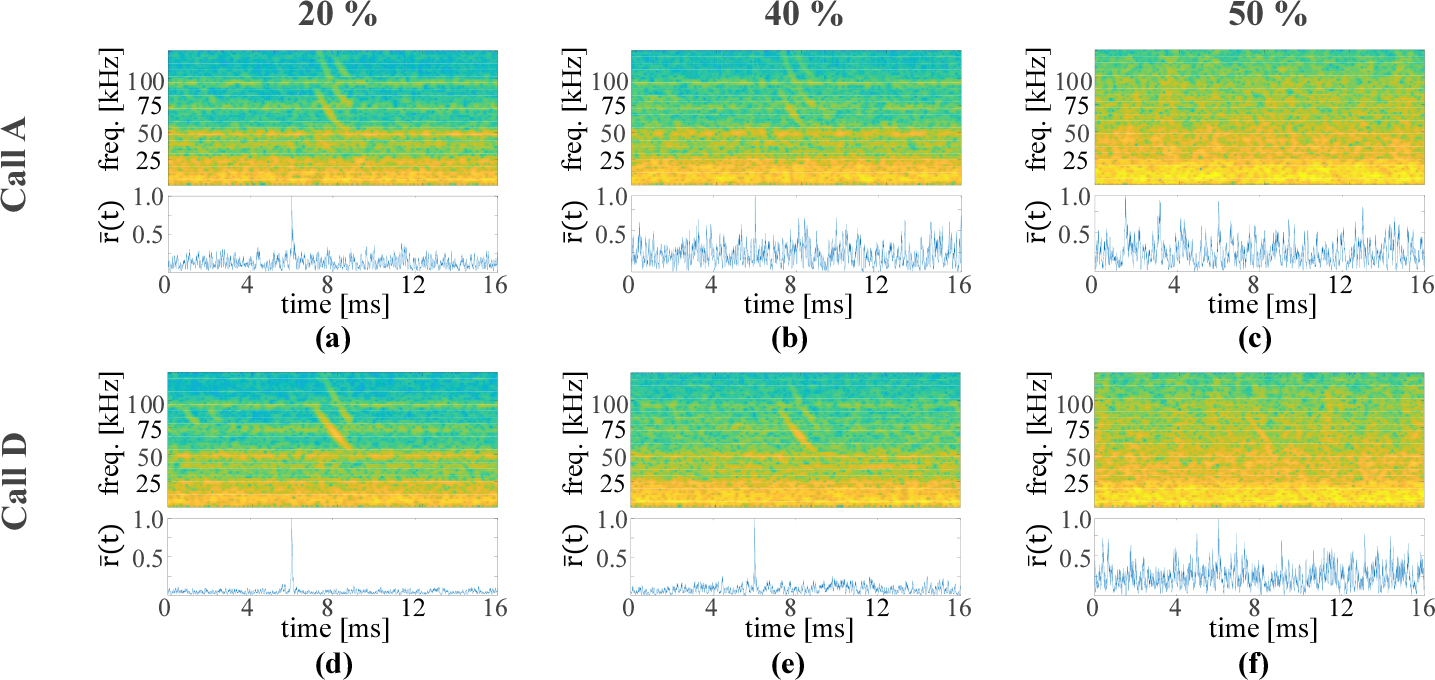
한편, 탐지 소리 종류에 따라 정합 필터 출력에서 차이점이 관찰된다. Call D[Fig. 4(d) ~ (f)]를 사용한 경우, 정합 필터 결과는 Call A와 비교하여 탐지 소리의 존재 여부에 따라 크게 대비되는 결과를 확인할 수 있다. 위 예시로부터, Call A보다 Call D를 사용할 때, 높은 탐지율을 기대할 수 있다.
3.3.3 탐지 소리별 검출 성능 비교
Fig. 5는 탐지 소리 종류(Call A–D), 반사판 거리, 모터 출력에 따른 f1-score 기반 검출 성능을 보여준다. 전반적으로 반사체 거리가 증가할수록 반사음 세기가 감쇄하여 검출률이 감소하는 경향을 확인할 수 있다. 동시에 1 m 이내에서는 회전익 구동으로 형성된 유체 유동이 반사판과 센서 주변 물체에 반사되어 추가적인 잡음을 생성한다. 때문에 일부 근거리 상황에서 탐지 성능이 보다 낮은 현상이 관찰되기도 한다(1.4 m, 40 % 에서 녹음 중 외부 잡음이 발생함).
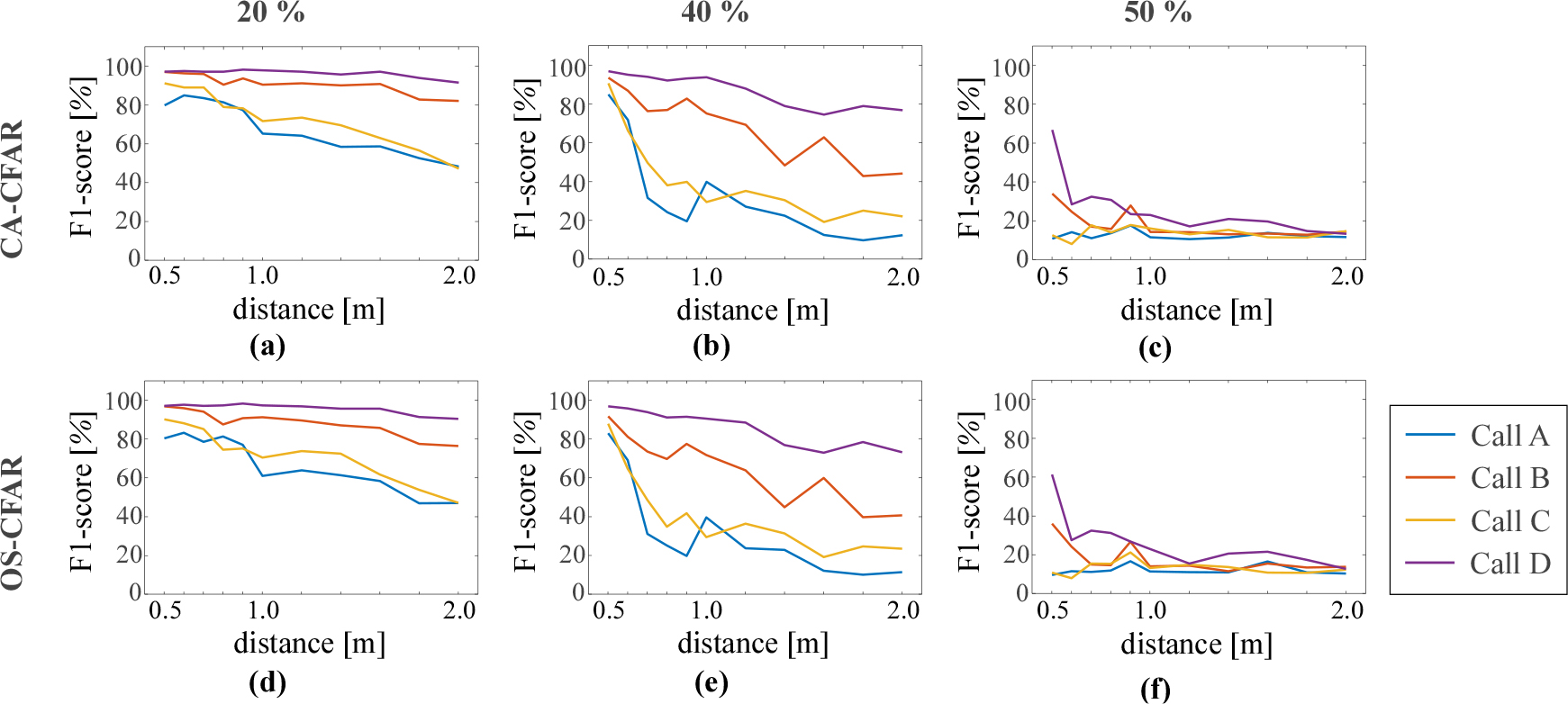
동시에, 탐지 소리 종류에 따라 거리 증가에 따른 성능 저하가 상이하다. Call A와 Call C의 경우, 반사체까지 거리가 멀어지면서 탐지율이 크게 하락한다. 특히 40 % 출력에서 0.7 m 이상 구간에서 f1-score가 급격히 감소하여 약 30 % 이하를 기록한다. 반면, Call B와 Call D의 경우, 거리가 멀어짐에도 비교적 강인한 탐지율을 보인다. 2 m, 40 % 출력에서 약 80 %의 f1-score를 확인할 수 있다[Fig. 5(b)].
이러한 차이는 드론 잡음 스펙트럼에서 BPF 고조파 대역이 탐지 소리 일부 대역과 중첩될 수 있기 때문으로 해석된다(Fig. 3). 1차 FM 요소가 BPF 고조파와 유사한 주파수 대역에 위치할 경우, 고조파 잡음에 의해, 신호 대 잡음 비가 감소하여 검출 성능이 저하될 수 있다. 반대로 광대역 탐지 소리를 구성하거나, 고조파 잡음 대역을 피해서 에너지를 배치할 경우, 검출 성능 향상을 기대할 수 있다. 하지만 강한 모터 출력으로 난류가 발생하면 광대역 잡음으로 인해, 반사음 검출에 한계를 보인다[Fig. 5(c), (f)].
마지막으로 CA-CFAR과 OS-CFAR의 결과는 전반적으로 유사한 경향을 보여준다. 이는 본 실험 환경에서 잡음 통계가 시간적으로 큰 비균일성을 갖지 않는 비교적 균질한 조건으로 유지되어, 배경잡음 추정 방식에 따른 차이가 제한된 것으로 해석된다.[7]
IV. 잡음 제거 기법에 관한 토의
Fig. 4와 같이 드론의 잡음은 톤성 고조파 성분과 공력에 기인한 광대역 성분이 복합적으로 관찰되며, 시간에 따라 비교적 정적인 특성을 보인다. 이때, 기존 정적 잡음 제거 기법을 적용을 고려할 수 있지만, 다음 사항을 주의해야 한다.
단일 채널 기법에서, 반사음 신호 대 드론 잡음비가 극단적으로 낮아, 잡음 추정에서 탐지 소리를 잡음으로 오인할 가능성이 있다. 빔포밍으로 대표되는 다중 채널 기법은 방향성 간섭원을 억제하는 데 효과적이지만, 드론에서 프로펠러 주변 난류와 다운워시에 의한 잡음은 확산 잡음에 가까워 효과가 제한될 수 있다. 따라서 드론 환경에서는 잡음의 고조파·광대역 구조와 공간적 확산 특성을 고려한 환경 특화 잡음 억제 및 신호처리 전략이 요구된다.
V. 결 론
본 논문에서는 드론 환경에서 모터 출력에 따른 잡음 특성과 탐지 소리 설계가 초음파 반사음 탐지율에 미치는 영향을 실험적으로 분석하였다. 박쥐 생체 소나 신호를 모사한 2 ms 길이의 초음파 탐지 소리를 설계하고, 0.18 m 프로펠러가 탑재된 중형 드론에 초음파 스피커/마이크를 탑재하여 투명 반사판(0.5 m – 2.0 m)으로부터 반사음을 수집한 뒤, 매치드 필터와 CFAR 기반 임계 검출로 탐지 성능을 f1-score로 평가하였다. 그 결과, 탐지 신호의 에너지를 2차 주파수 변조 요소에 상대적으로 크게 집중한 경우 2.0 m 거리에서 모터 출력이 40 %인 조건에서 약 80 %의 f1-score를 확인하였으며, 모터 출력이 증가할수록 공력 기인 광대역 잡음이 증가하여 탐지 소리 식별성이 저하되어, 50 % 출력에서 반사음 검출이 제한됨을 확인하였다.
결론적으로, 드론 환경에서 강인한 초음파 탐지를 위해, 드론 구동에 따른 고조파 잡음 대역을 회피하여 탐지 소리의 포락선 모델을 설계하고, 드론 잡음에 따라 탐지 소리를 적응적으로 선택하는 전략이 필요하다. 향후 연구에서는 비행 중인 드론에서 음향 환경을 재현하여 잡음을 분석하고 효과적인 초음파 탐지에 관한 연구를 수행할 계획이다.
