

I. 서 론
선박 프로펠러의 캐비테이션 소음은 프로펠러 부근의 유체 속도가 증가하여 압력이 일정 수준 이하로 떨어질 때 발생한다.[1] 캐비테이션 소음이 발생하면 수중 방사 소음의 수준이 급격히 상승하는데, 특히 함정의 경우에 피탐지 확률이 증가해 치명적인 위협 요인이 될 수 있다. 따라서 함정의 생존성 향상을 위하여 캐비테이션 발생 여부를 지속적으로 모니터링하고 초생 속도(Cavitation Inception Speed, CIS)를 정확하고 신속하게 판단하는 것이 매우 중요하다.
캐비테이션의 발생 여부는 주로 시각적 또는 센서계측신호를 기준으로 판단한다. 센서로 측정된 신호에 기반해 판별하는 기술은 시각적으로 판단하는 광학 기술에 비해 고유한 장점이 있다. 특히 초생 단계의 캐비테이션 공기 방울은 크기가 작고 발생 수도 적어 시각적으로 찾아내기엔 난도가 매우 높지만, 가청 범위의 펄스 신호를 방출하기 때문에 이 신호를 계측하여 판단하는 접근 방법이 유리하다. 따라서 음향센서 또는 가속도계로 계측한 신호에 기초해 캐비테이션 발생 여부를 판단하는 여러 연구가 진행됐다.
대표적인 방법은 음향센서 또는 가속도계로 계측한 신호를 기반으로 특정 문턱값 이상의 신호를 캐비테이션 신호로 판단하거나 데몬(Detection of Envelope Modulation On Noise, DEMON) 신호처리 기법을 통해 캐비테이션 발생 여부를 판별하는 방법이 있다.[2,3,4,5,6] 그러나 특정 문턱값으로 캐비테이션을 판단하는 방법은 문턱값 설정에 사용자의 경험과 주관이 개입되기 쉬운 경향이 있고, 데몬 분석을 위해서는 프로펠러에 대한 사전 정보가 필수적이며 복잡한 캐비테이션 발생 현상에 대한 물리적 이해가 필요하다. 특히 프로펠러 회전 주파수와 날개 통과 주파수 성분 분석이 충분히 이루어지지 않거나 단순 압력 변화에 의해서 캐비테이션을 판단할 때,[2] 또는 캐비테이션 신호 외 추가 음원 정보가 선체 진동 신호에 포함될 수 있는 경우 신호가 왜곡될 우려가 있다.[3,4,5] 이외에도 선체 외부의 추가적인 계측 시스템을 이용하여 실시간 처리가 어려운 점이 있다.[6]
본 연구에서는 이와 같은 종래의 문제점을 해소하기 위하여 선박 프로펠러의 캐비테이션 발생 여부를 선체에 부착된 음향 센서를 이용하여 조기에 인식할 수 있는 알고리즘을 제안한다. 특히 캐비테이션이 발생할 때 나타나는 피크 신호의 특징을 직관적이고 단순한 통계량에 기초하여 추출하였으며, 이를 이진 분류기와 결합한 캐비테이션 신호 자동 분류기의 성능을 센서 수와 모형 시험 조건 관점에서 평가하였다.
본 논문의 구성은 다음과 같다. II장에서는 캐비테이션 모형 시험에 관해 서술하고, III장에서는 특징 기반 캐비테이션 신호 탐지 기법에 관해 설명한다. IV장에서는 캐비테이션 신호 탐지 결과를 논하며, 결론은 V장에 정리하였다.
II. 캐비테이션 모형 시험
본 연구에서는 선박해양플랜트연구소에서 수행한 모형 시험 데이터가 사용되었다. 프로펠러 캐비테이션 모니터링을 목적으로 프로펠러 상부 모형선 선체에 매립한 7개의 하이드로폰으로 신호를 측정하였으며, 날개 수가 5인 프로펠러의 회전수를 28.7 Rotations Per Second(RPS)로 고정시킨 상태에서 터널 내부 압력을 비공동 상황에서 서서히 감압하여 캐비테이션을 발생시키는 방식으로 실험을 진행하였다. 일반적으로 CIS 모니터링 실험은 서로 다른 두 전진비에서 각각 진행하는데 본 실험에서는 전진비 별 총 7개의 공동수에서 신호를 취득하였다. 터널 내 유속은 9 m/s로 유지하였으며 샘플링 주파수 262,144 Hz로 총 10 s 동안 음향신호를 계측하였다. 실험 데이터에 대한 세부적인 내용은 Hwang et al.[7]의 논문을 참고하기 바란다. 한편 본 연구에서는 전진비 1.04에서 시행된 시험 중 4개의 조건만 사용한다. 각 조건에 대한 세부 내용은 Table 1과 같고 시각적으로 관찰된 캐비테이션은 Fig. 1과 같다.
Table 1.
Test condtions and visually observed cavitation.
| Test Cond. | Cavitation number, | Advance ratio, | Water speed (m/s) | Propeller r/min (r/s) | Visually observed |
| 1 | 3.0 | 1.04 | 9 | 1722 (28.7) | No cavity |
| 2 | 2.5 | ||||
| 3 | 2.3 | Intermittently | |||
| 4 | 2.1 | Developed |
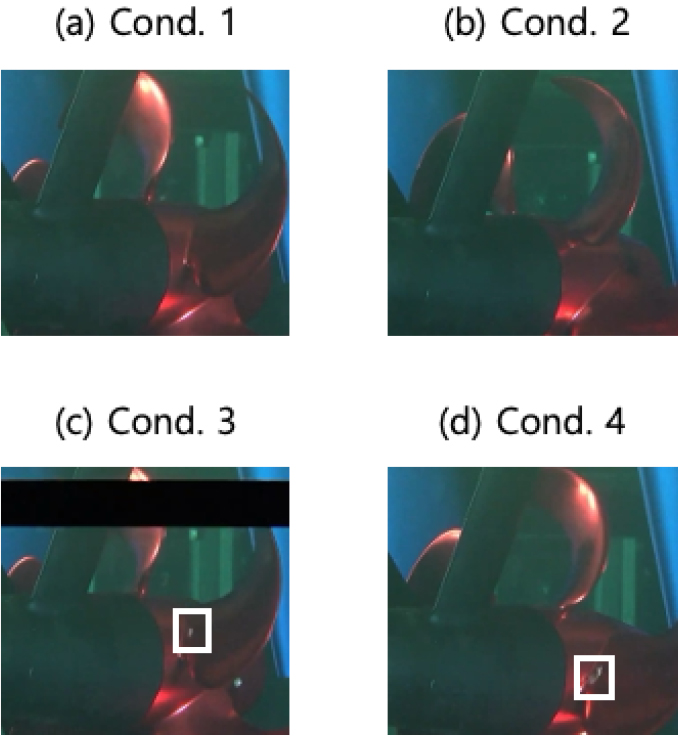
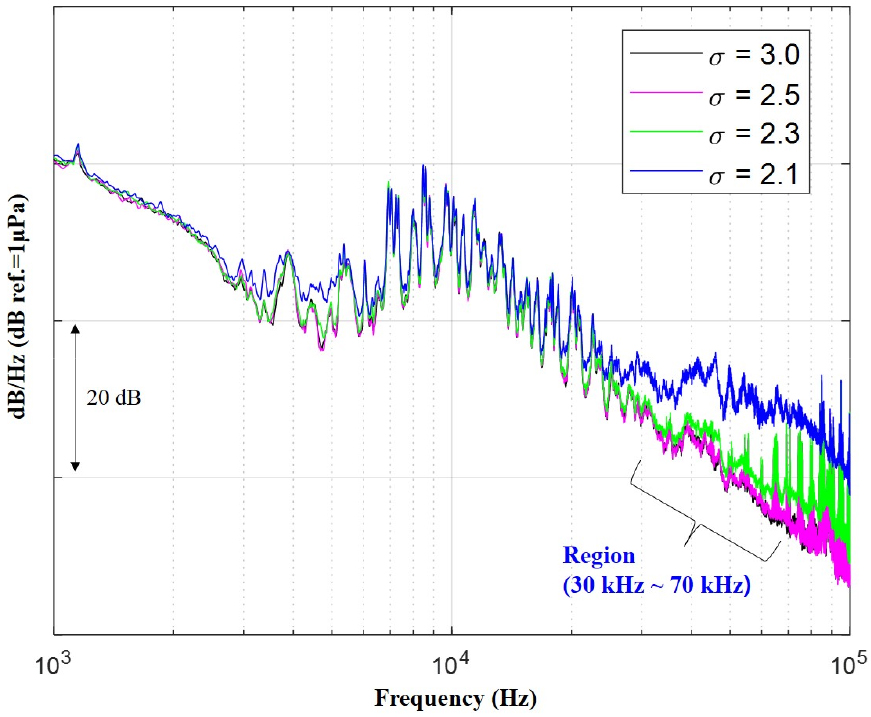
Test Conds. 1과 2는 비공동 상황으로 캐비테이션 관측이 되지 않았다. Test Cond. 3은 프로펠러 날개 뿌리부 근처에서 매우 간헐적으로 캐비테이션이 관측되었는데[Fig. 1(c)의 흰색 상자] Fig. 2와 같이 음향신호의 파워스펙트럼밀도를 살펴보면 30 kHz ~ 70 kHz 영역에서 약 5 dB 이상 상승함을 확인할 수 있다. Test Cond. 4는 Fig. 1(d)와 같이 완전히 발달한 캐비테이션이 관측되었으며 Fig. 2와 같이 20 kHz 이상의 주파수 영역 대부분에서 파워스펙트럼이 상승한 것을 확인할 수 있다. 70 kHz 이상에서 발견되는 협대역 신호는 전기잡음으로 추정된다.
III. 특징 기반 캐비테이션 신호 탐지
2장에서 서술한 프로펠러 캐비테이션 모니터링 실험 데이터를 바탕으로 캐비테이션 탐지를 위한 알고리즘을 설명한다. 본 장은 주파수 대역선정-신호 단편 데이터 생성-데이터 전처리 및 훈련 순으로 서술한다.
먼저 공동수 감소에 따라 파워스펙트럼밀도가 현저히 증가하는 주파수 대역을 관심주파수 대역으로 선정하였다. Fig. 2를 살펴보면 30 kHz ~ 70 kHz 주파수 영역에서 공동수 변화에 따른 파워스펙트럼밀도의 변화가 강하게 나타나는 것을 알 수 있다. 따라서 본 연구에서 관심 주파수 대역을 30 kHz ~ 70 kHz로 선정하였으며, 이 구간에 대하여 대역통과필터를 적용한 시계열 신호는 Fig. 3과 같다.
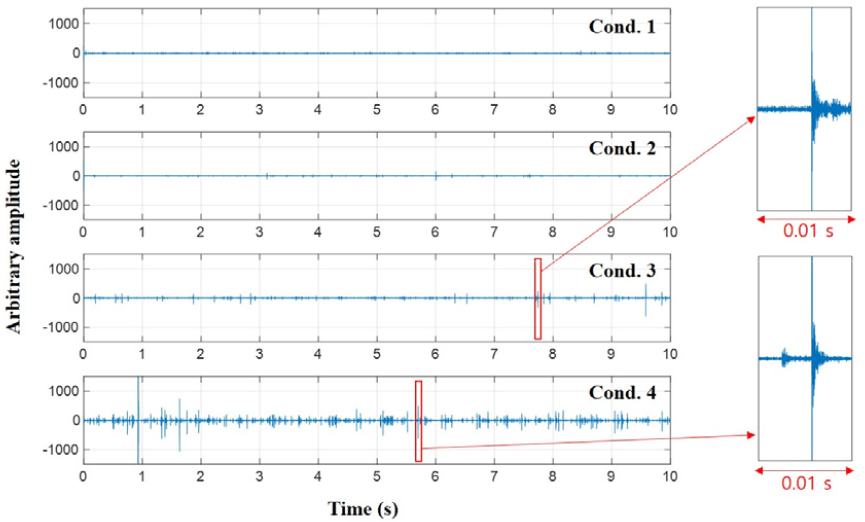
Fig. 3에서 Cond. 1에 해당하는 대역통과필터 적용 시계열신호는 변화가 관찰되지 않는 비공동 상황인 것을 볼 수 있다. Cond. 2의 경우 Cond. 1과 거의 비슷하나 희소하게 불규칙적인 신호가 발견된다. Cond. 3에서는 간헐적으로 큰 진폭의 신호가 확인되는데, 이는 Fig. 1(c)에서 보이는 바와 같이 매우 짧은 시간 동안 발생하고 사라지는 작은 크기의 캐비테이션에 기인한 것으로 보인다. Cond. 4의 경우 Fig. 1(d)와 같이 완전히 발달한 캐비테이션에 의해 크고 작은 진폭의 신호가 혼재된 형태를 보인다.
위와 같이 대역통과필터를 적용한 시계열신호에서 공동수 변화에 따른 피크 신호를 관찰하였는데 이러한 신호는 공동수가 감소하면서 생성되고 발달하는 캐비테이션의 영향으로 볼 수 있다. 따라서 캐비테이션에 대한 정보가 피크 신호에 담겨있다 가정하면, 피크 신호가 발생한 지점의 신호 단편으로부터 캐비테이션 신호의 특징을 추출하여 탐지에 활용할 수 있다.
신호 단편 데이터는 다음과 같은 과정으로 수행되어 생성된다. 각 시험 조건 별 10 s의 시계열 신호 중 피크와 비피크로 구분된 신호 단편 데이터를 생성한다. 피크 데이터는 Matlab 함수인 islocalmax를 사용하여 국소적으로 피크가 발생한 지점을 검출 및 분할하여 생성하였다. 비피크 데이터는 센서별 신호에서 발견되는 신호의 평균 진폭값을 문턱값으로 설정하여 분할 생성하는데 전체 데이터 개수 중 피크 및 비피크 데이터 수의 균형을 유지하기 위하여 각 조건 별 100개의 비피크 데이터만 고려하였다. 이렇게 생성된 신호 단편 데이터는 Table 2에 정리하였다.
Table 2.
Segmented dataset.
한편 단편 데이터는 사용자의 주관적인 판단 기준에 따라 분할되기 때문에 보다 객관적이고 정량적인 판단 지표가 필요하다. 따라서 통계량에 기초한 특징 인자를 정의하여 캐비테이션 피크 신호 분류기에 활용할 수 있다. 본 연구에서는 캐비테이션 피크 신호의 조기 인식을 위하여 평균, 분산, 비대칭도, 첨도, 그리고 Root Mean Square(RMS) 등 총 다섯 가지의 통계량에 기초한 특징을 정의하였다. 단편 신호의 절대값을 , 길이를 라고 하면 평균과 분산은 각각 , 로 정의된다. 비대칭도와 첨도는 Eq. (1)로부터 각각 =3, =4인 경우로 표현된다.
RMS는 Eq. (2)에 기초해 계산한다.
한편 직관적이고 단순한 분류를 위하여 가장 간단한 기계 학습 알고리즘인 k-최근접 이웃(k-Nearest Neighbors, k-NN) 알고리즘이 분류기로 적용되었다. 차원 축소 과정은 생략하였다.
IV. 캐비테이션 신호 탐지 결과
본 장에서는 앞서 설명한 캐비테이션 신호 탐지 알고리즘을 적용한 결과를 서술한다. 우선 본 연구에서 고려한 훈련 및 검증 데이터셋 구성을 소개한다. 본 연구에서는 다음 두 가지의 사항을 고려하여 시험을 구성하였다. 먼저 캐비테이션 신호가 관찰된다고 판단한 모형 시험 조건인 Conds. 3과 4 중 한 시험 조건을 선정하여 훈련 데이터셋으로 설정하고 나머지 다른 시험 조건에서 계측한 데이터를 검증 데이터셋으로 설정한다(Tasks 1 & 2). 이는 캐비테이션에 의한 피크 신호 특성을 분류기가 학습하도록 고려한 구성이다. 다른 한 가지는 단일 센서에서 계측한 데이터로 분류기를 훈련한 후 해당 모형시험 조건의 다른 센서(Tasks 3 & 4) 또는 다른 모형시험 조건(Task 5 & 6)에서 계측한 데이터를 검증 데이터셋으로 활용하는 것이다. 이는 단일 센서를 활용하여 캐비테이션 탐지가 가능한지 살펴볼 수 있는 경우가 될 것이다. 단일 센서는 프로펠러 직상부에 가장 가까운 1번 센서를 선정하였다. 훈련 및 검증 데이터셋 구성에 따른 시험은 Table 3에 정리하였다.
Table 3.
Task configuration and performance evaluation.
성능 평가 지표로써 F1 score를 선정하였다. F1 score는 범주 당 데이터 수의 균형이 맞지 않을 때 성능을 평가하는 지표이다. 각 시험에 대한 성능 평가 결과는 Table 3에 덧붙였다.
먼저 캐비테이션 신호가 간헐적으로(Cond. 3) 또는 충분히(Cond. 4) 관측된 데이터로 훈련한 후 다른 시험 조건의 데이터로 검증한 결과를 살펴보면, 모두 0.9 이상의 높은 F1 score를 보였다(Tasks 1& 2). Conds. 3과 4 각각 640, 2760개의 피크 단편 신호와 이로부터 파생된 2차 특징 인자를 포함하기 때문에 피크 신호의 특성을 충분히 학습한 결과가 나타났다고 판단된다.
단일 센서로 학습한 경우 앞서 언급한 모든 센서를 활용한 결과에 미치지 못하는 성능이 나타났는데, 특히 Cond. 3의 단일 센서 데이터로 훈련하고 같은 조건의 다른 센서 데이터로 검증한 결과가 가장 낮은 F1 score를 보였다(Task 3). 이는 프로펠러 직상부에 위치하여 캐비테이션 신호를 가장 왜곡없이 수신한 1번 센서와 다른 센서 간 차이가 반영된 것으로 판단된다. 다만 이 차이는 캐비테이션 발생에 의한 피크 신호를 더욱 많이 포함하게 되면 상당부분 완화될 수 있는 것으로 보인다(Task 4). 단일 센서로 학습한 시험 조건과 다른 조건의 센서 데이터로 검증한 결과(Tasks 5 & 6)는 모든 센서를 활용하여 학습한 결과에 비하여 약간 낮은 성능을 보였다. 이는 검증 데이터셋에 Conds. 1 & 2가 포함되어 상대적으로 비공동 데이터의 비율이 높아졌기 때문으로 분석된다.
V. 결 론
본 논문에서는 캐비테이션 시계열 신호의 특징 인자를 추출하여 캐비테이션 피크 신호를 탐지하는 방법을 제안하였다. 구체적으로 정리하면, 우선 모형 시험 데이터로부터 공동수에 따라 시계열 신호에 나타나는 캐비테이션 발생 특징을 관찰하였고 이를 통해 캐비테이션 피크 신호를 분할하였다. 또한 분할된 신호 단편 데이터로부터 정량적인 통계적 특징을 추출하였고 센서 수 및 모험 시험 조건에 따라 분류기의 성능을 평가하였다. 모든 센서를 활용한 결과가 가장 높은 성능을 보여주었지만, 단일 센서에 캐비테이션 신호 특성이 충분히 포함된 경우에도 상당한 성능을 보이는 것을 확인하였다.
본 연구에서 제안한 기법으로 캐비테이션의 발생 여부를 자동으로 판단할 수 있다. 다만 본 연구에서는 캐비테이션 조기 인식에 초점을 맞추었기 때문에 시계열 신호로부터 추출 가능한 아주 단순한 통계량을 사용하였다. 후속 연구에서는 캐비테이션의 물리적 현상을 포함한 복합적인 특징을 반영할 수 있도록 연구하고자 한다.
