

I. 서 론
소나는 수중환경에서 기동하는 표적의 정보를 획득하기 위한 시스템으로 작동 방식에 따라 수동소나와 능동소나로 나뉜다.[1,2] 수중운동체의 소음 저감 기술이 크게 발달함에 따라 수동소나로는 탐지가 어려워져 능동소나에 대한 많은 연구가 이루어지고 있다. 그중에서도 특히 고속으로 기동하는 수중운동체를 탐지하는 경우 빠르게 대상 표적의 위치 정보를 갱신해야 한다. 따라서 고속 수중운동체 탐지에 적합한 송신 기법이 필요하다.[3]
가장 기본적인 송신 기법으로는 펄스 반복 주기(Pulse Repetition Interval, PRI) 기반 기법이 있다.[4] 펄스 반복 주기 기반 기법은 한 주기 동안 하나의 펄스를 송신하여 탐지 영역에 존재하는 표적을 탐색한다. 한 주기에 한 방향만 탐지할 수 있으므로 넓은 영역의 표적을 탐지하기 위해서는 긴 시간이 필요하다. 따라서, 펄스 반복 주기 기반 기법은 고속 수중운동체를 탐지하기 어려운 한계점이 있다. 이를 보완하기 위해 분할된 펄스 길이 기반, 그리고 다중 주파수 기반 송신 기법이 제안되었다.[5,6,7]
펄스 송신 기법에서 대역폭을 분할하는 이유는 신호의 직교성을 얻기 위함인데 Reference [8]에서 제안된 일반화된 사인파 주파수 변조(Generalized Sinusoidal Frequency Modulation, GSFM)의 경우 펄스 간의 대역폭이 완전히 겹치더라도 직교성을 유지할 수 있다고 알려져 있다. GSFM은 파라미터에 따라 무수히 많은 형태를 설계할 수 있으며, 특정 파라미터에서는 Sinusoidal Frequency Modulation(SFM) 또는 Linear Frequency Modulation(LFM)과 특성이 같아진다.[8,9,10,11]
본 논문에서는 GSFM을 사용하여 대역폭을 나누지 않고도 직교성을 만족하는 펄스를 설계하여 동시에 넓은 영역을 탐지할 수 있는 고속 수중운동체 탐지 기법을 제안한다. 한정된 대역폭 조건에서 LFM과 달리 GSFM은 펄스의 직교성을 유지하기 용이하기 때문에 시간-대역폭 곱에서 이점을 얻을 수 있다.[9,10,12] 고속 수중운동체 탐지의 가장 중요한 점은 송신 주기를 최소화하여 탐지 위치를 빠르게 갱신해야 한다는 점이다. GSFM의 경우 주어진 대역폭을 넓게 사용할 수 있으므로 펄스 길이를 최소화하더라도 상대적으로 탐지 성능이 우수하고 표적의 거리 및 속도 추정 오차가 낮아진다. 또한, 파라미터에 따라 많은 종류의 부펄스를 생성할 수 있으므로 탐지 방향뿐만 아니라 같은 탐지 방향 내에서도 PRI마다 다른 형태의 부펄스를 설계할 수 있다.
II. 관련 연구
2.1 펄스 송신 기법
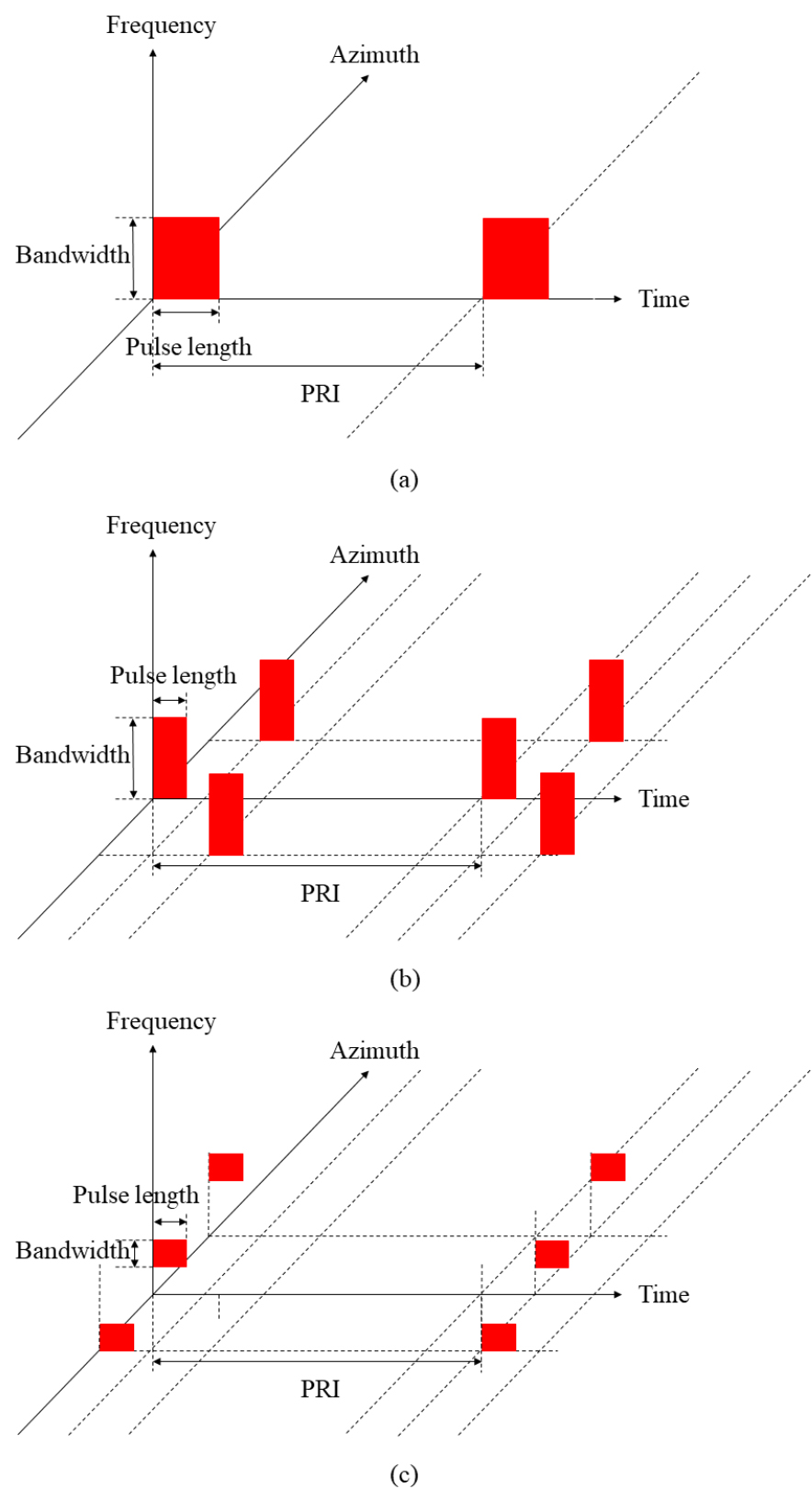
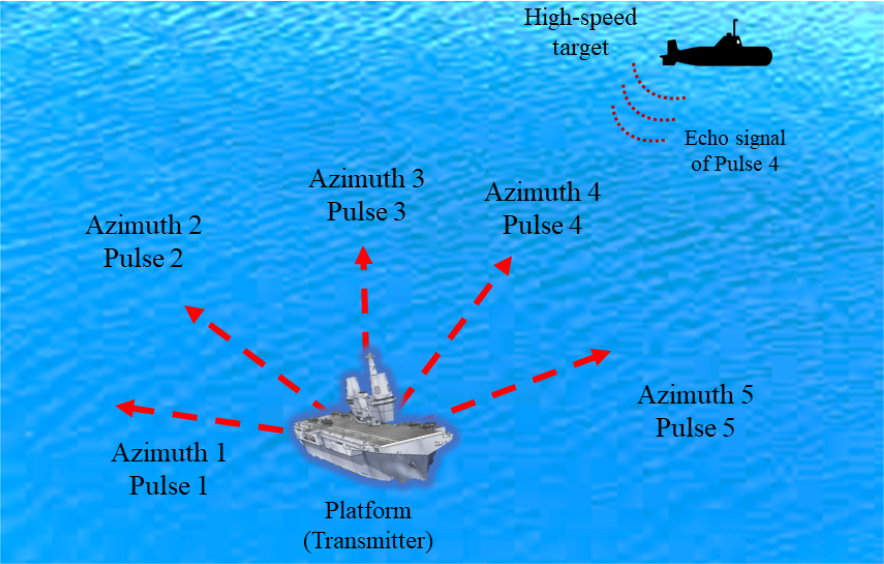
능동 소나용 펄스 송신 기법으로 다양한 방식이 연구되고 있다. 가장 기본적인 방법은 펄스 반복 주기 기반 기법이 있다. 펄스 반복 주기 기반 기법은 Fig. 1(a)와 같이 정해진 주기 내에 단 한 번의 빔만을 송신한다. 한 주기 당, 한 방향으로만 빔을 송신하기 때문에 Fig. 2와 같이 선박으로부터 여러 방향의 표적을 탐지하려면 많은 시간이 필요한 단점이 있다. 이를 보완하기 위해 한 주기 내의 시간 영역에서 펄스를 시간차로 송신하는 분할된 펄스 길이 기반 기법이 등장하였다. Fig. 1(b)에서 볼 수 있듯이 한 주기 내에 모든 방향으로 탐색할 수 있다. 하지만 수신된 신호가 어떤 송신 빔의 반향 신호인지 알 수 없으므로 정확한 거리 추정이 어렵다는 한계가 있다. 마지막으로 앞선 두 펄스 송신 기법을 보완하는 다중 주파수 기반 송신 기법이 연구되었다. 다중 주파수 기반 송신 기법은 탐지 방향마다 겹치지 않는 대역폭의 신호를 사용하여 방향마다 정확한 거리 추정이 가능해졌다. 하지만 대역폭을 분할하면 시간-대역폭 곱이 감소하여 표적 탐지 성능에서 손해를 보게 된다.[5,13]
2.2 GSFM
GSFM은 Reference [8]에서 제안된 펄스로 기존의 SFM의 부엽이 높다는 단점을 보완한 형태이며 수식은 아래와 같다.
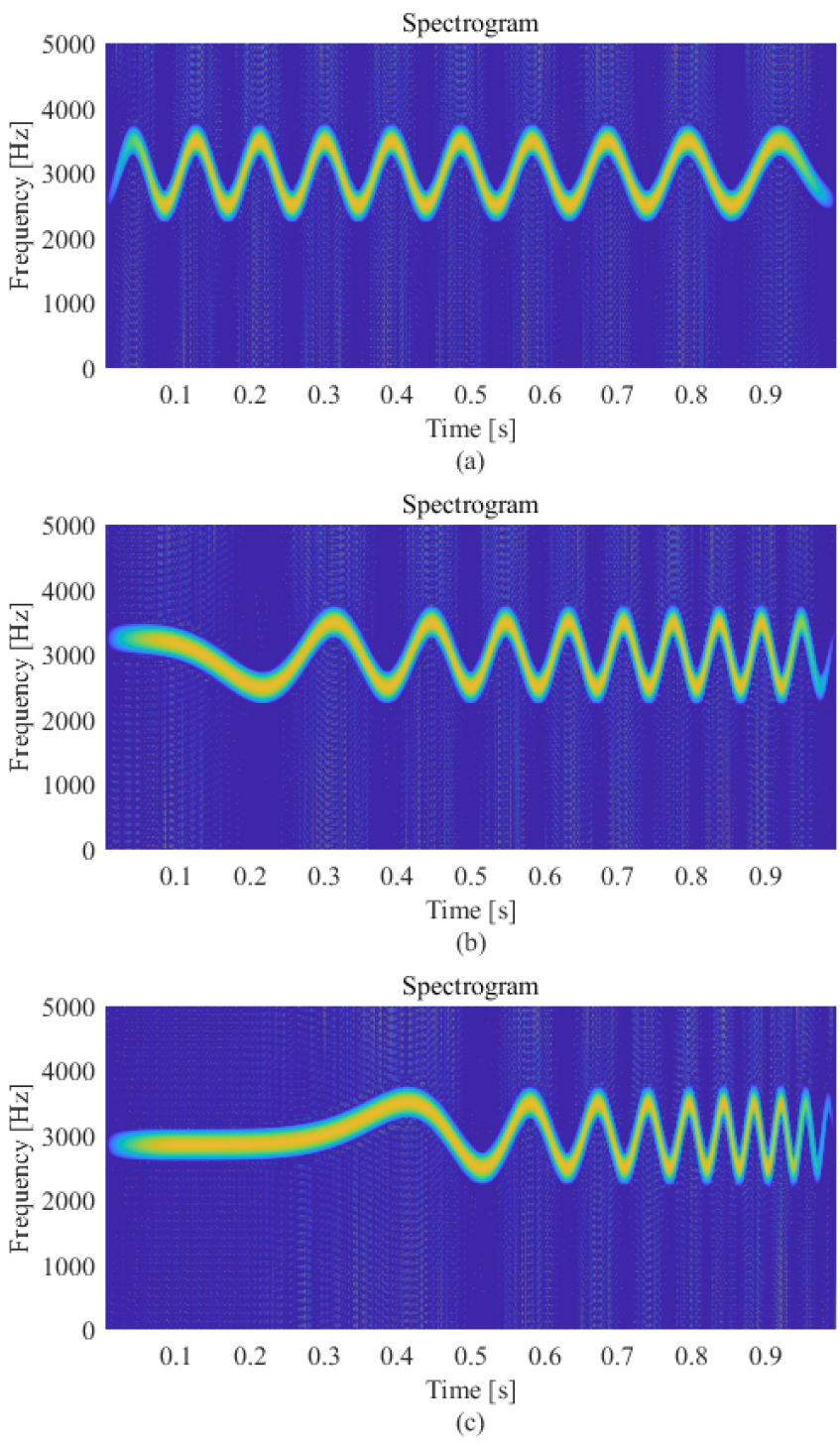
여기서 는 시간 축 인덱스, 는 펄스의 길이, 𝛼는 주파수 변조 파라미터, 는 대역폭, 그리고 𝛽는 변조 지수를 나타낸다. 𝜌는 1보다 같거나 커야 하며, 1인 경우 GSFM은 SFM과 동일한 펄스 형태가 된다. Fig. 3에서 볼 수 있듯이 𝜌가 커질수록 GSFM은 시간-주파수 축에서 비대칭성이 커진다. 다음으로, 𝛼는 GSFM의 순시 주파수 함수의 사이클 수 를 결정한다. GSFM은 도플러 평면에서 주엽이 뚜렷하고 부엽이 작은 압정 형태를 나타내는데 간단한 Time/Frequency Reflection(TFR)을 통해 직교성이 보장되는 부펄스를 생성할 수 있다. TFR은 시간 축과 주파수축에서 신호를 반전시키는 방법으로 반전이 적용되지 않은 기본형 Forward-Time(FT)을 포함하여 FT/Flipped-Frequency(FT/FF), Reverse-Time(RT), RT/ FF, Time-symmetric(TS), 그리고 TS/FF 총 6가지 형태의 펄스가 있다.[11]
III. 제안한 방법
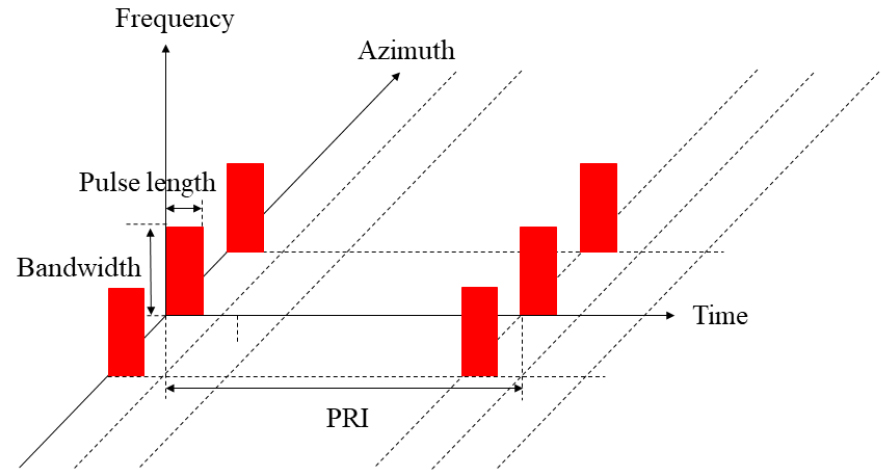
Fig. 1의 기존 펄스 송신 기법들의 한계점을 극복하기 위해 GSFM 간의 직교성을 활용한 펄스 송신 기법을 제안한다. 기존 기법들에서는 고속 탐색을 위해 방위마다 송신하는 펄스에 시간 지연을 주거나 대역폭을 나누었다. 하지만 제안한 방법은 Fig. 4에서 확인할 수 있듯이 동시에 여러 방위로 펄스를 송신하되, 대역폭을 분할하지 않는다. 따라서, 기존 시간-대역폭 곱의 손실을 보완한다. 또한, 기존에 GSFM을 활용한 연구들[6,9,10,11]과 달리 펄스 길이를 대폭 줄이고 펄스 주기를 최소화하여 표적반사율을 높인다.
제안한 방법은 부펄스 간의 직교성을 유지하기 위해 펄스 파라미터 𝜌, , TFR을 무작위로 설정하여 총 차원의 부펄스를 생성한 뒤 각각의 부펄스 간의 정합 필터링 최댓값이 –6 dB를 넘지 않도록 그리디 알고리즘을 사용하여 탐색한다.[14] 여기서 은 시간 축에서의 거리 추정 모호성을 방지하기 위한 부펄스 수이고, 는 탐지 방위 수이다. 본 연구에서는 10개의 부펄스를 사용하였고 5개의 방위로 동시에 펄스를 송신하였다. GSFM 파라미터의 탐색 범위는 Table 1과 같다. 탐색 범위는 Reference [9]를 참고하여 설정하였다.
IV. 모의 실험 결과 및 분석
4.1 모의 실험 환경
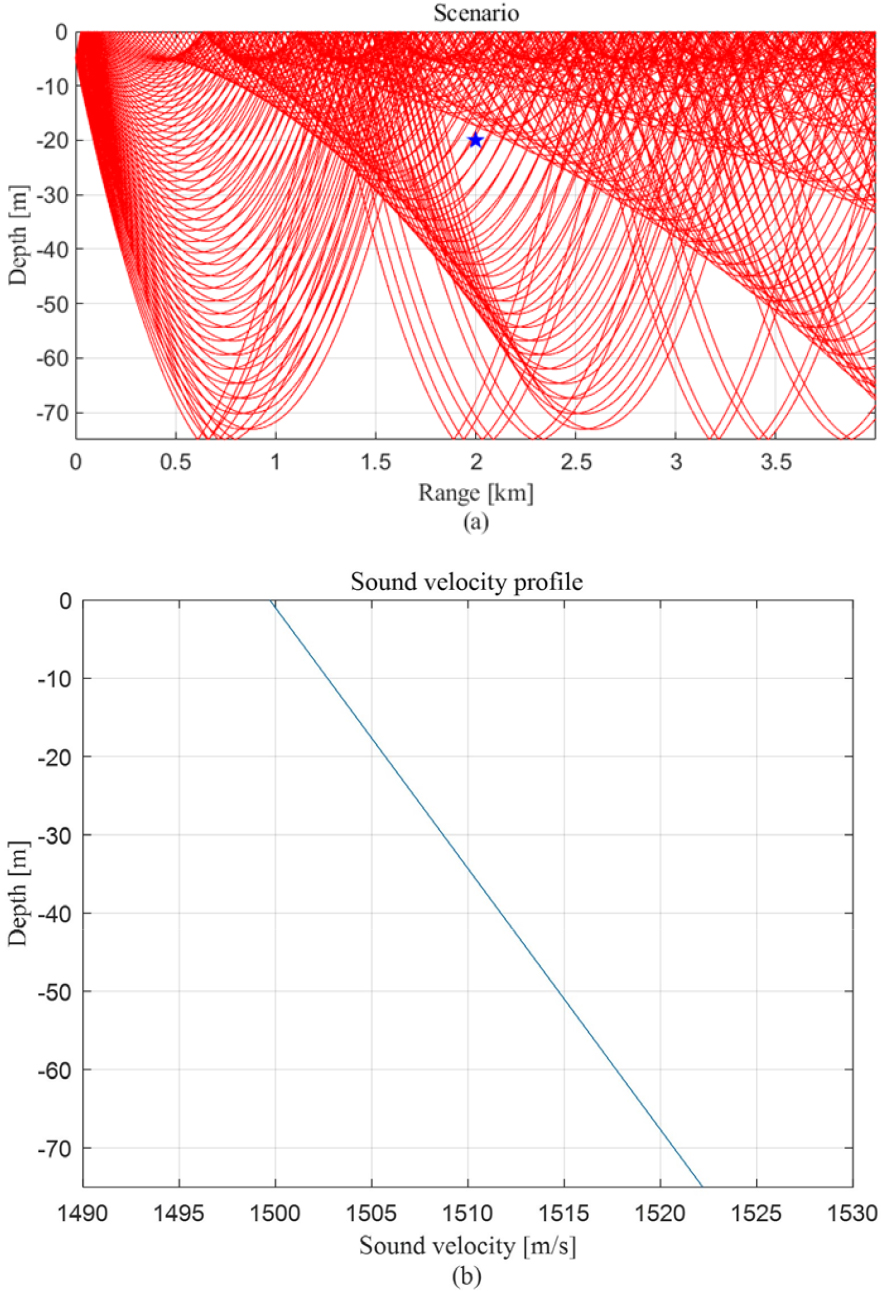
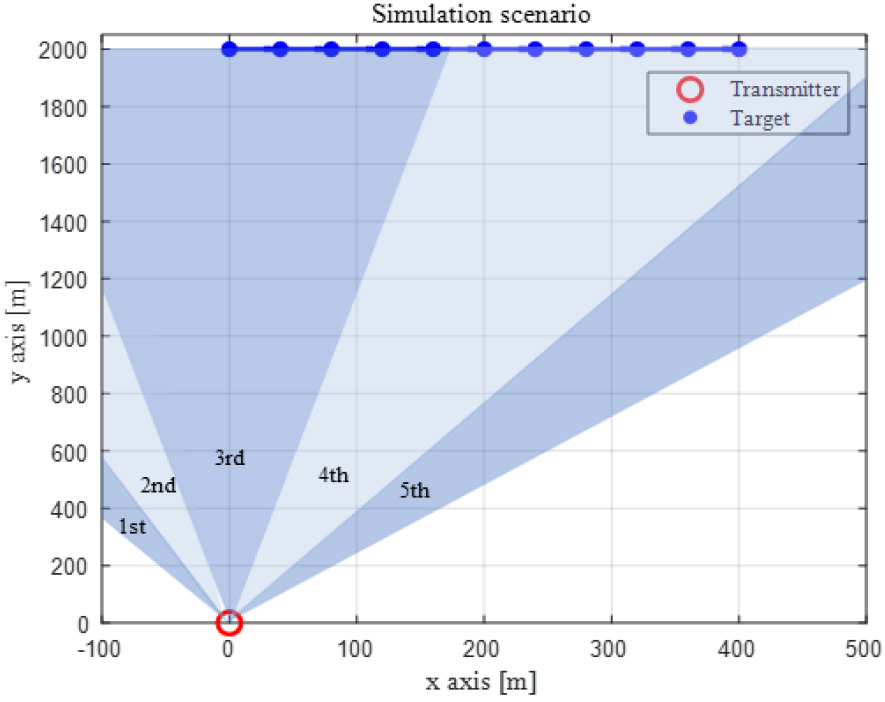
본 논문에서는 제안한 방법의 유효성을 검증하기 위해 모의 수중 환경을 구성하였다. 탐지 방위는 총 5가지로, 각각 –20°, -10°, 0°, 10°, 20°를 중심으로 약 10°의 빔 폭을 가진다고 가정하였다. 실제 수중 환경을 모사하기 위해 음선 추적 기법[15]과 잔향 모델[16]을 적용하였고 신호 대 잡음비 –5 dB의 백색 잡음을 추가하였다. 모의 수중 환경에서 5 s 동안 표적이 움직이는 시나리오를 수행하였고, 이를 시각화하기 위해 생성된 음선 샘플과 음속 구조를 Fig. 5에 삽입하였고, Fig. 6에는 표적의 움직임을 나타내었다. Fig. 5(b)의 음속 구조는 수중에서의 음파의 진행을 시각화하기 위해 임의로 설정한 가상의 환경으로. 음속 구조 조건은 실험 성능에는 큰 영향을 미치지 않는다.
대역폭이 동일한 LFM과 GSFM을 송신 펄스로 사용하였고 자세한 파라미터는 Table 2와 같다. LFM의 경우 직교성을 위해 대역폭을 겹치지 않게 분할하였다. 모든 신호는 10,000 Hz의 표본화율로 생성하였고 고속 탐색을 위해 펄스 반복 주기는 0.5 s, 펄스 길이는 0.05 s로 설정하였다. 자세한 실험 조건은 Table 3에 정리하였다.
Table 2.
Pulse parameters.
| LFM | GSFM | |
| Center frequency | [2,550 Hz:100 Hz:3,450 Hz] | 3,000 Hz |
| Bandwidth of subpulses | 100 Hz | 1,000 Hz |
| Number of subpulses | 10 | |
Table 3.
Simulation parameters.
4.2 성능 평가
성능을 평가하기에 앞서 고속 탐색을 수행하기 위해 직교성을 충분히 유지할 수 있는 펄스 길이를 탐색한다. LFM과 GSFM의 기본 파라미터는 Table 2와 같으며 GSFM의 𝜌, , TFR은 그리디 알고리즘으로 탐색한 파라미터를 사용한다.[14] 펄스 길이는 기존 GSFM 연구[6,9,10,11]에서 주로 사용하는 1 s에서 0.01 s 사이로 평가하였다. 도플러 효과를 고려하기 위해 펄스들의 레플리카를 표적 속도인 40 m/s까지 0.5 m/s 단위로 생성하여 정합 필터링을 수행하였다. 시간-도플러 측에서 첨두치가 가장 큰 경우, 즉 직교성이 GSFM은 펄스 길이가 짧더라도 직교성이 충분히 유지되지만, LFM은 펄스 길이가 짧아지면 직교성이 거의 사라지는 경우가 발생하는 것을 Fig. 7을 통해 알 수 있다. LFM은 한정된 대역폭 내에서 대역폭을 분할하는 경우 인접한 대역폭의 펄스 간의 직교성이 사라진다. Fig. 8과 같이 LFM은 대역이 인접한 펄스 간의 Peak Sidelobe Level(PSL)이 매우 높은데, 이는 곧 거리 추정 오차의 원인이 된다. 반면에 GSFM은 LFM보다 평균적으로는 직교성이 크지 않지만 최소한의 직교성을 보장한다. 이로써 0.05 s의 펄스 길이, 그리고 10 %의 duty cycle을 사용하여 고속 탐색과 거리 추정 정확도를 동시에 만족하고자 하였다. 먼저 Fig. 9(a) LFM의 도플러-시간 정합 필터링 결과를 보면 첨두치가 실제표적의 위치가 아닌 다른 곳에 발생하는 것을 볼 수 있다. 이는 곧 거리 추정 오차로 연결된다. 반면에, Fig. 9(b) GSFM의 도플러-시간 정합 필터링 결과에서는 시간 축에서 부펄스 간의 직교성이 크기 때문에 표적이 위치하는 시간의 첨두치에 비교해 나머지 구간의 첨두치가 매우 낮았다. 결론적으로, 방위-시간 영역에서 가장 낮을 때의 결과를 비교하였다. Fig. 8과 같이 직교성이 높은 GSFM의 부펄스들을 활용하면 고속 수중운동체를 위한 고속 탐색이 가능함을 확인할 수 있다. Figs. 10과 11에는 표적의 거리 및 속도 추정 오차를 신호 대 잔향비(Signal-to-Reverberation Ratio, SRR)에 대하여 정리하였다. Fig. 9의 정합 필터링 결과에서 예상할 수 있듯이 LFM은 시간 축에서 수신한 반향 신호가 몇 번째 주기에서 송신한 펄스인지 구별하기 어렵다. 그로 인해, Figs. 10과 11에서 볼 수 있듯이 거리 추정은 1,000 m 이상, 속도 추정은 40 m/s 이상의 매우 큰 오차가 발생하였다. Fig. 10(a), (b)를 보면 LFM은 SRR이 높아 잔향 신호의 영향이 적은 경우에도 오차가 크게 발생하는 것을 확인할 수 있다. 그에 반해, Fig. 10(c), (d)를 살펴보면 GSFM은 반향이 비교적 적은 –10 dB 이상일 때에는 거리 추정 1 m, 그리고 속도 추정 1 m/s 이내의 매우 적은 오차만 발생하였다. 다만, SRR이 –15 dB일 때에는 잔향 신호로 인해 정합 필터링의 첨두치 위치가 부정확해져 GSFM도 거리 및 속도 추정 오차가 크게 발생하는 것을 확인할 수 있다. 마지막으로, Fig. 12를 보면 GSFM의 경우 방위별로 동시에 송신한 펄스 간의 직교성도 확보되기 때문에 대략 어느 방위에서 표적이 탐지되었는지 알 수 있다.
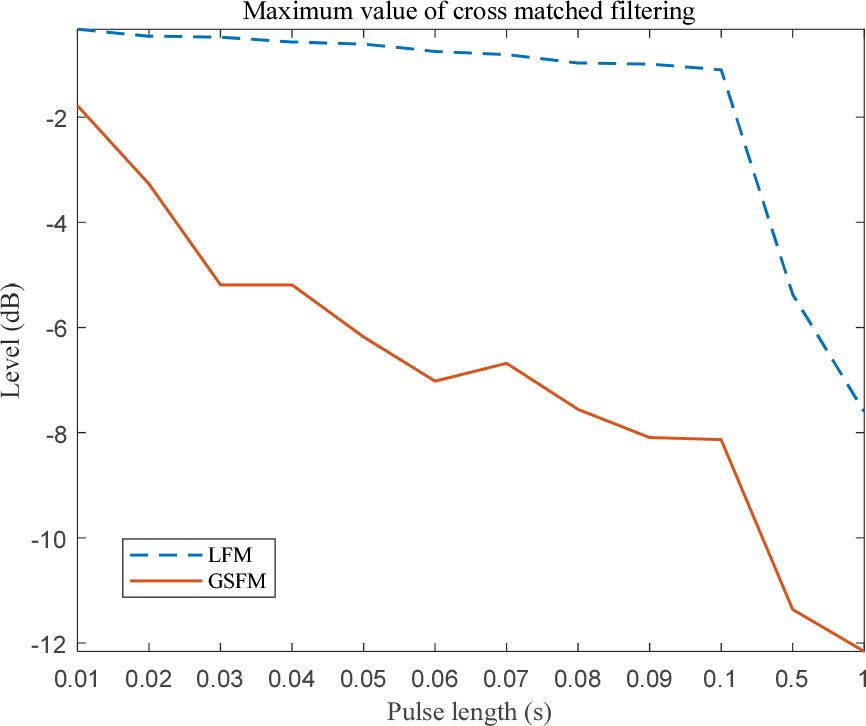
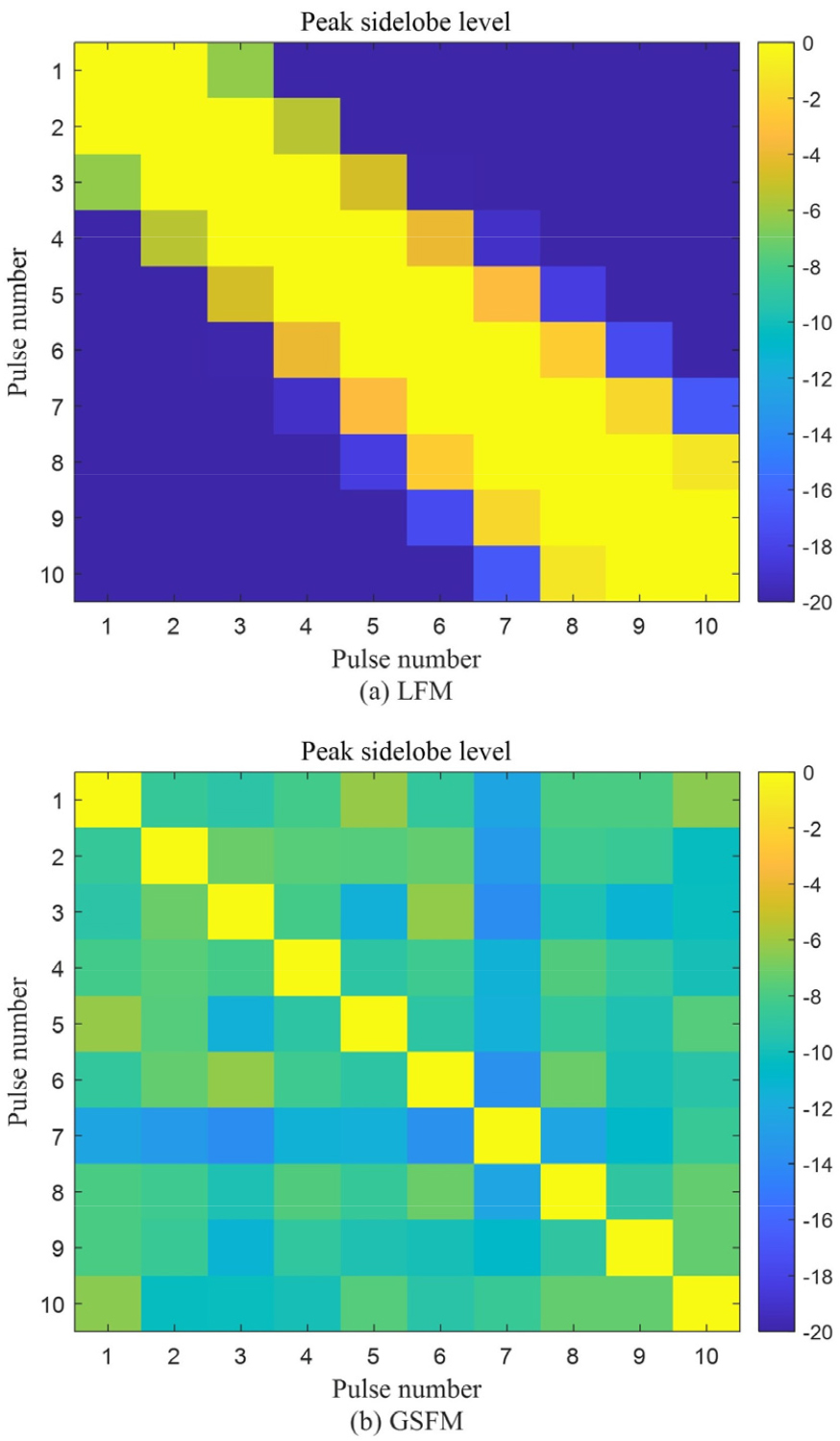
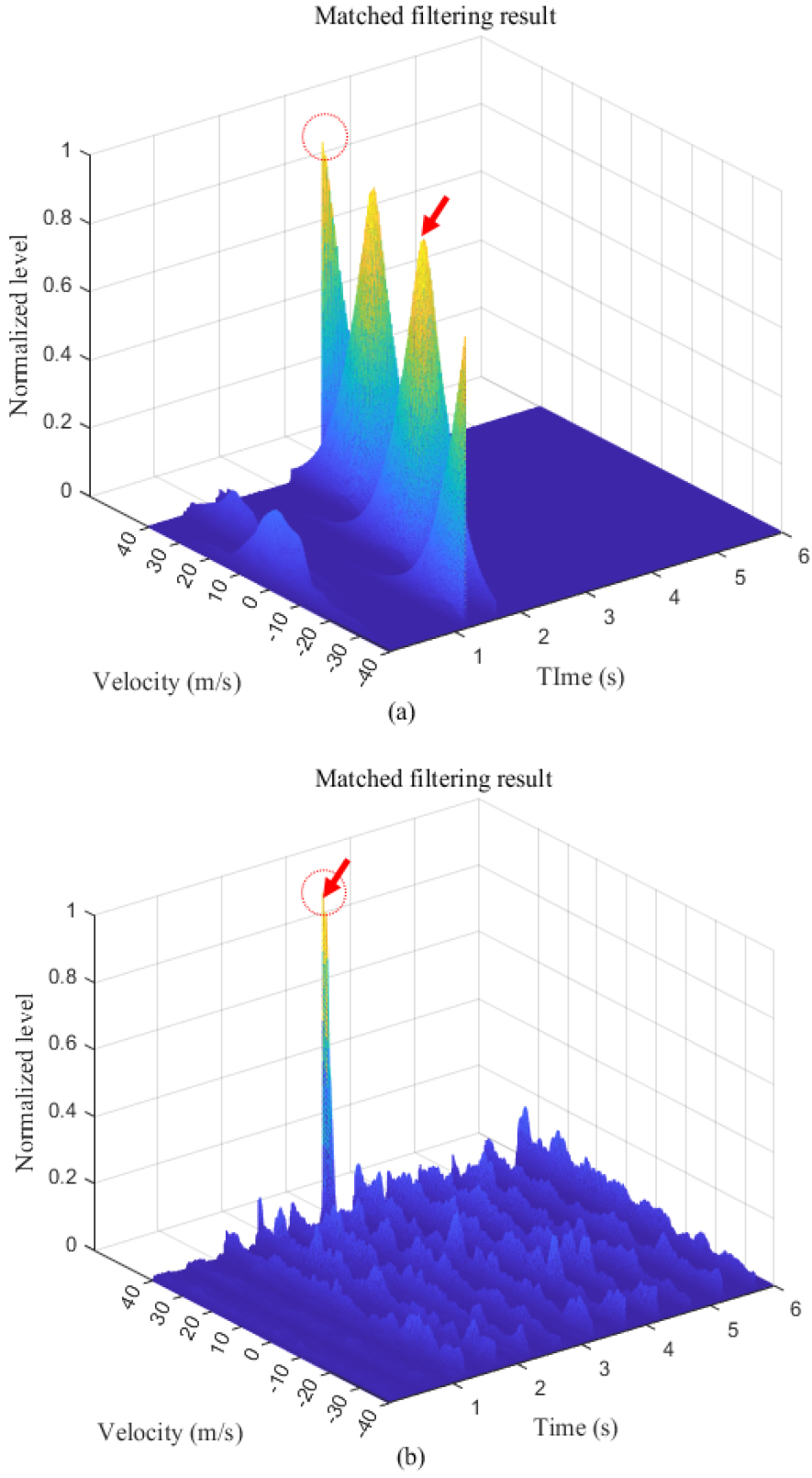
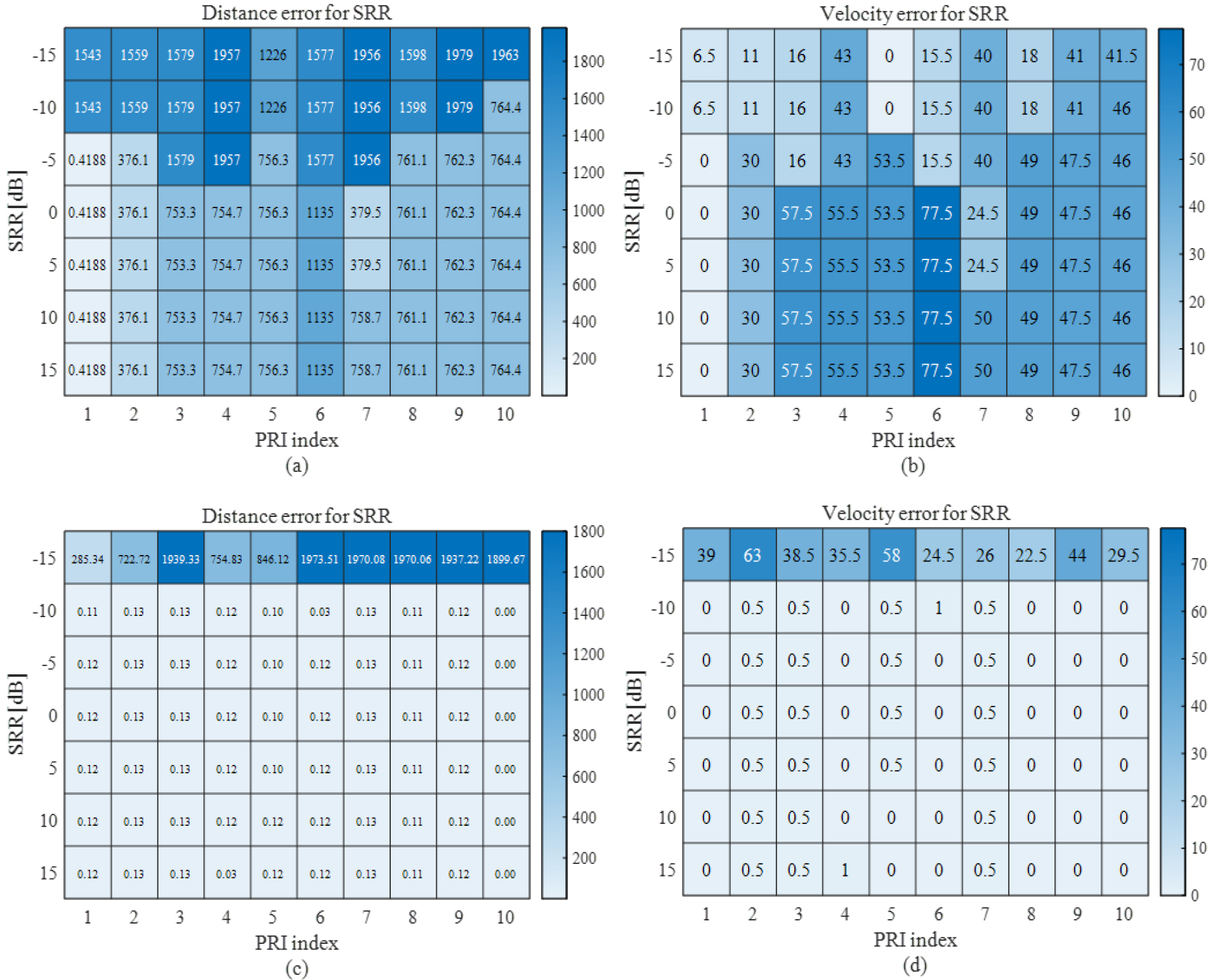
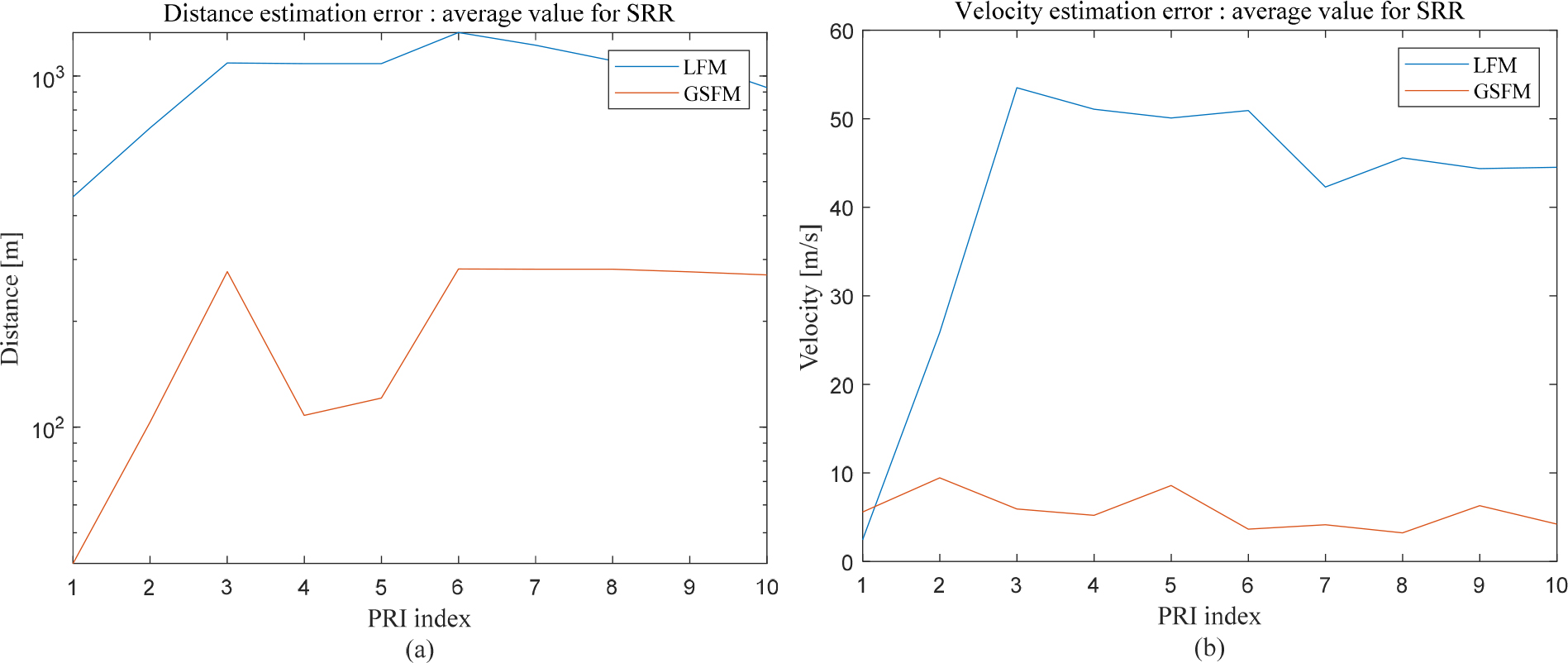
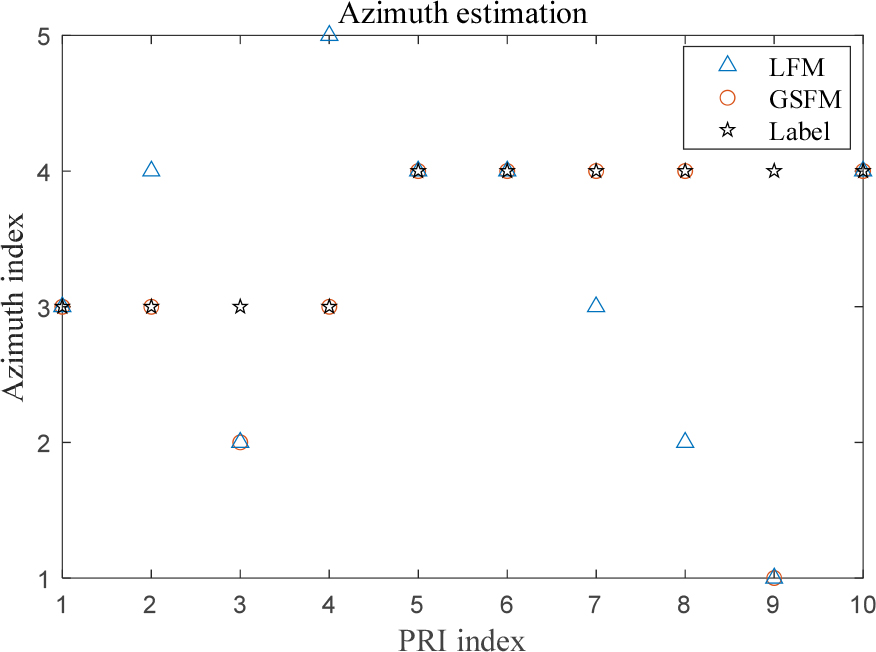
Fig. 12.
(Color available online) Azimuth estimation for SRR = -10 dB. This is the result of estimating the orientation in which the target is located in the scenario shown in Fig. 5 (triangle : LFM, circle : GSFM, star : label). Label refers to the actual target position in the simulated environment.
V. 결 론
본 논문에서는 GSFM을 이용하여 능동소나 고속 수중운동체 탐지를 위한 펄스 송신 기법을 제안하였다. 표적의 거리를 빠르게 갱신하기 위해 PRI와 펄스 길이를 최대한 줄이면서 동시에 직교성을 만족하는 GSFM을 설계하였다. 모의 환경을 구성하여 다양한 SRR에 대하여 거리 및 속도 추정 결과를 LFM과 비교하였다. 실험 결과, LFM 대비 GSFM은 한정된 대역폭과 짧은 펄스 길이 조건에서도 거리 및 속도 추정 오차가 매우 작았다. 이러한 성능 차이의 가장 큰 요인은 GSFM은 부펄스 간의 충분한 직교성을 유지할 수 있었고 부펄스의 대역폭을 분할하지 않아 시간-대역폭 곱에 이득이 있었기 때문이다. 마찬가지로, GSFM은 방위마다 송신하는 부펄스간의 직교성이 충분하므로 표적의 방위 또한 추정할 수 있었다. 향후에는 표적의 속도나 거리 설정을 달리한 시나리오를 추가하여, 다양한 실험 환경에서의 제안한 방법의 성능을 분석하고, GSFM의 파라미터 최적화를 수행할 예정이다.
