

I. 서 론
능동소나에서 수상 및 수중 플랫폼으로부터 송신음을 직접 방사한 후, 표적에 반사되어 입사되는 수신음을 탐지 및 추적한다. 이와는 다르게 수동소나에서는 해양 표적의 방사소음을 수상 및 수중 플랫폼에서 수신하여 탐지 및 추적한다. 능동소나와 수동소나에서 관심표적 이외의 신호가 수신되며, 이를 클러터라고 한다. 수상 플랫폼과 달리 수중 플랫폼에서는 능동소나의 활용이 제한적이어서 수동소나를 주로 활용하며, 표적을 탐지 및 추적하는 데에 클러터를 배제하는 방법이 주요한 이슈가 되어 왔다.
클러터를 배제하는 주요 이슈를 해결하기 위하여 다양한 자료결합 기법[1,2,3,4,5]이 제안되었다. 대표적으로 표적의 상태를 추정하는 필터의 예측값과 실제 수신하고 탐지한 측정치 중 최단 거리의 측정치에 대해 자료결합을 수행하는 Nearest Neighbor association Filter(NNF)[6]와 탐지한 측정치 중 신호준위가 가장 높은 측정치에 대해 자료결합을 수행하는 Strongest Neighbor association Filter(SNF)[7]가 있다. 또한, 탐지한 모든 측정치에 대해 필터의 예측값 기준으로 거리 가중치 및 확률을 회귀적으로 적용하여 가상의 측정치를 생성하고 자료결합을 수행하는 Probabilistic Data Association Filter(PDAF)[8]가 제안되었고, 추적의 강인성을 향상시켰다.
이러한 자료결합 기법을 적용하는 경우, 유효측정치 범위인 유효 게이트를 결정해주어야 한다. 이러한 유효 게이트 크기를 결정하지 않으면, 표적과 물리적으로 무관한 측정치도 자료결합에 활용될 수 있다. 자료결합 분야에서 널리 적용되고 있는 유효 게이트 설정 기법은 표적의 기동이 가우시안 분포 가정 하에 필터의 오차공분산에 기반하여 3-게이트 내에 존재한다는 기법이다. 기존 게이트 범위 설정 기법은 표적 신호가 클러터 신호에 대비하여 미약하지 않거나 클러터 밀도가 높지 않은 일반적인 환경에서는 효과적이고 널리 적용되고 있다. 그러나, 표적 신호가 클러터에 대비하여 상대적으로 미약하거나 클러터의 밀도가 높은 환경에서는 필터 추정의 안정성에 따라 표적이 게이트 내에 있을 가관측성이 악화되는 경우가 발생한다.[9] 즉, 표적에 대한 측정치로부터 표적의 상태를 추정할 수 있을 때 표적은 관측이 가능하며 관측이 불가한 경우에는 시스템의 안정성과 성능에 문제가 발생할 수 있다.
가관측성이 악화되는 경우를 해결하기 위하여 다양한 기법[10,11,12,13,14,15]이 제안되었다. 필터의 예측 단계에서 파티클을 랜덤하게 위치시키고, 측정치를 중심으로 가중치를 계산 및 필터의 추정치를 생성하는 Particle Filter(PF)[16]가 대표적이다. 또한, 표적 존재확률을 적용한 Integrated Probabilistic Data Association Filter (IPDAF)와 표적 존재확률 및 허위표적을 구분하는 False Target Discrimination(FTD)을 적용한 Integrated Track Splitting(ITS)이 제안되었고 추적 강인성 향상과 성능 향상을 보여주었다. 그러나, 이러한 기법의 단점은 연산량의 증가이다. 대표적으로 PF의 경우, 파티클의 수가 증가함에 따라 추적 강인성과 성능은 향상되나, 연산량이 기하급수적으로 증가한다.
또한, 표적 추적에 대한 강인성을 향상시키기 위해서 H∞ 필터[17]가 제안되었다. H∞ 필터는 기존의 상태 공간에서의 Kalman Filter(KF)[18] 표적 상태 추정과 달리 크레인 공간[19]에서 표적 상태를 추정하는 KF 필터이다. 크레인 공간에서의 벡터 내적에 대한 부정 특성을 KF에 적용하여 추적 상태 추정에 대한 강인성을 향상시켰으나, 자료결합 기법에서의 게이트 기법은 기존의 가우시안 분포 가정 하의 게이트 기법을 적용하였다.
본 논문에서는 연산량을 줄이면서 추적 강인성을 유지할 수 있는 새로운 자료결합 게이트 기법을 제시하고자 한다. 이를 위해 첫 번째로 H∞ 필터를 표적의 상태를 추정하는 데에 적용하며, 두 번째로 유효 게이트의 범위를 새로이 산출하는 자료결합 게이트 기법으로 H∞ 놈 계산을 수행 및 이분법 알고리즘을 적용한다. H∞ 필터와 H∞ 놈 이분법 자료결합 게이트 기법을 활용하여 추적을 수행하고, 기존의 KF 및 가우시안 분포 가정 하의 필터 오차공분산에 기반한 3-게이트 기법과 대비하여 추적 강인성을 비교한다.
연산량을 줄이면서 추적 강인성을 향상시키는 본 연구에서의 기법을 통해 컨포멀(Conformal) 소나 등의 다양한 추적 분야에 접목시킬 수 있을 것으로 기대한다.
본 논문은 다음과 같이 구성된다. II절에서는 추적 및 자료결합기법에 대한 일반적인 설명과 함께 본 논문에서 제안하는 기법과 기존 기법에 공통으로 적용하는 추적 및 자료결합기법을 설명한다. III절에서는 본 논문에서 제안하는 게이트기법과 해석적인 의미를 기술하며, IV절에서는 제안하는 기법에 대해서 모의 신호를 활용하여 실시한 시뮬레이션 결과를 설명한다. V절에서는 본 논문에서 제안하는 기법에 대한 결론 및 향후 계획을 기술한다.
II. 방위추적 자료결합기법
널리 적용되고 있는 유효 게이트 설정 기법은 표적의 오차공분산에 기인한 방법으로 KF를 활용하는 경우에는 다음과 같다.[2]
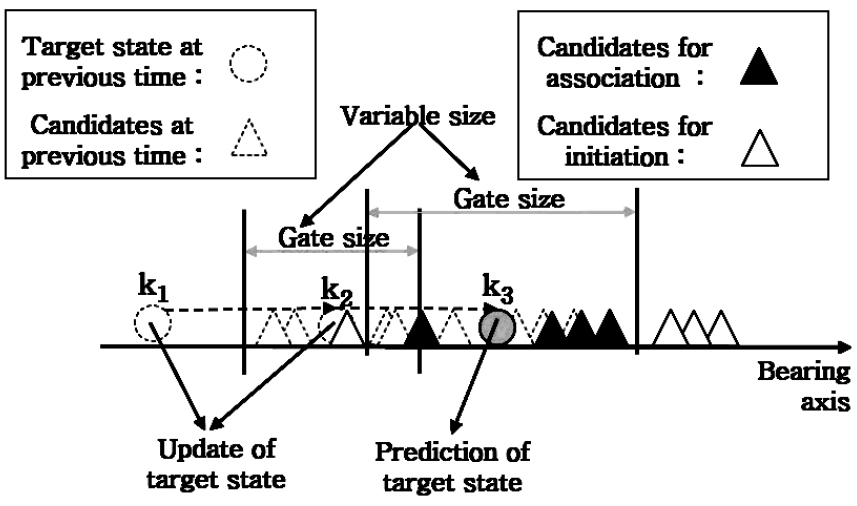
여기에서 는 시간 샘플링 인덱스에서의 필터 예측값과 자료결합 대상인 측정치 간의 잔차이며, 는 필터의 오차공분산에 기반하여 측정잡음과 칼만 이득을 반영한 혁신공분산이다. 또한, 는 가우시안 분포에서의 표준편차의 허용범위를 나타내며 3-가 널리 활용되고 있다. 게이트의 크기는 시간 샘플링 인덱스가 진행되면서 필터의 오차공분산에 따라 가변적으로 변하게 된다. 이를 1차원 관측시스템에 적용하면 Fig. 1과 같이 표현할 수 있다. Fig. 1에서 시간 샘플링 인덱스는 k1에서 k3으로 진행되며, Fig. 1에서의 1차원 관측시스템은 방위축이다.
1차원 관측시스템은 다차원으로 확장이 가능하며, 컨포멀 소나와 같이 수평방위와 수직방위의 관측시스템을 갖는 경우에는 Fig. 2와 같이 2차원 관측시스템으로 나타낼 수 있다. 이 경우에는 유효게이트는 수평방위 축과 수직방위 축으로 구성된 타원체로 표현된다.
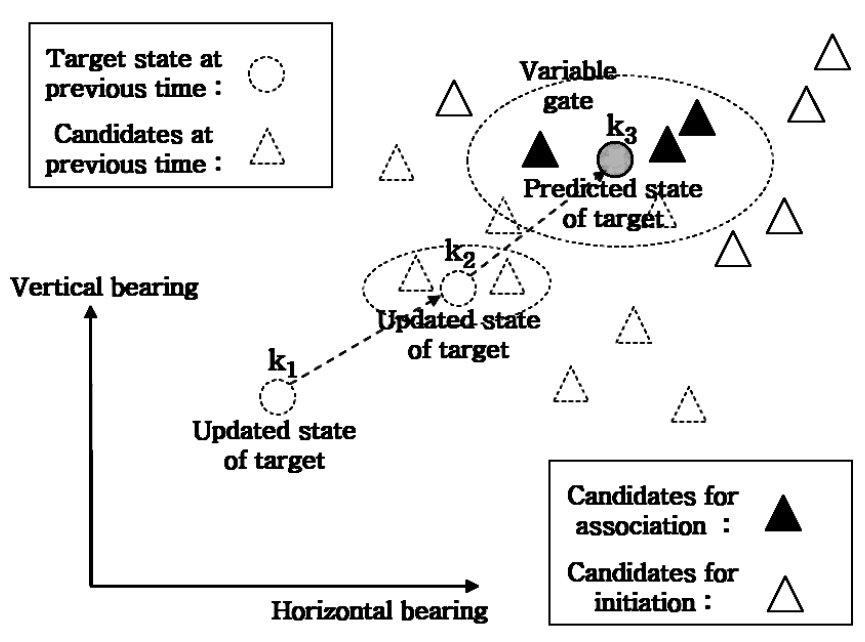
컨포멀 소나에서 수평방위의 측정잡음과 수직방위의 측정잡음은 각각 배열 배치에 따라 달라지며, 일반적으로는 수평방위보다 수직방위의 측정잡음이 더 높은 경향이 있다.
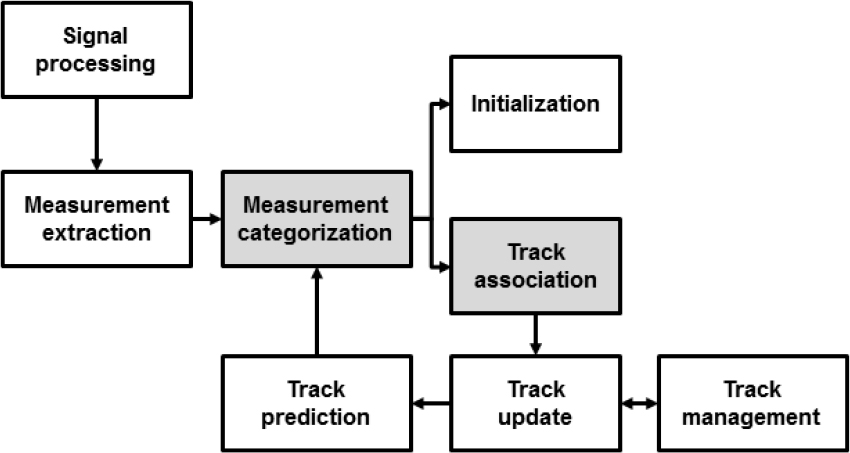
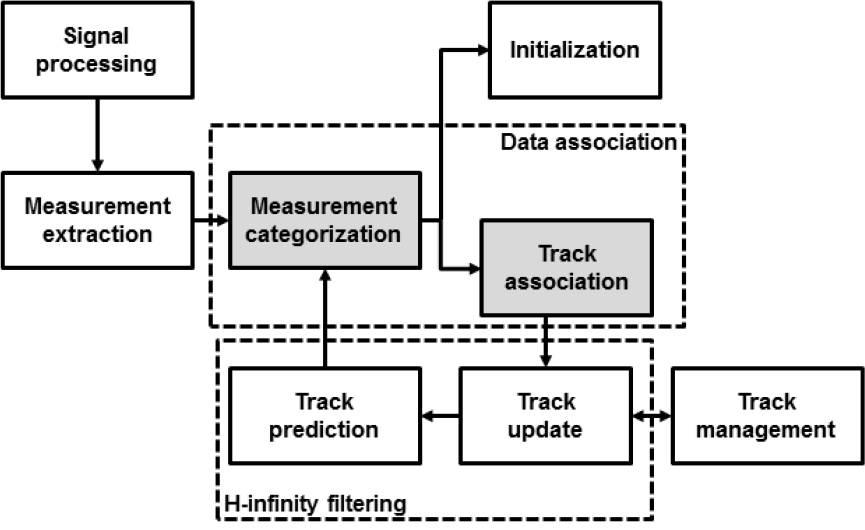
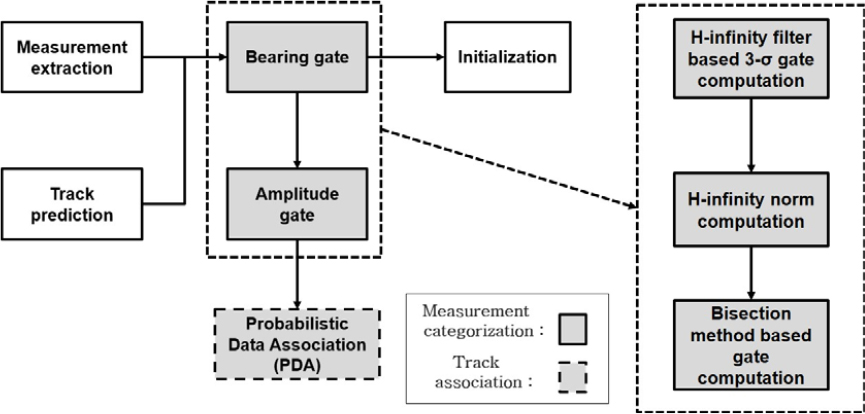
본 논문에서는 제안한 자료결합 게이트 기법과 Eq. (1) 자료결합 게이트 기법을 각각 실험군과 대조군으로 비교한다. 실험군과 대조군의 공통적인 추적 시스템 구성은 Fig. 3과 같으며, Fig. 4는 Fig. 3의 측정치 분류와 트랙 연계에 대한 상세 구성이다.[20] 이는 자료결합 시 측정치의 위치정보와 함께 측정치의 신호준위 특성을 고려한다. 실험군 게이트 기법과 대조군 게이트 기법은 Fig. 4의 방위 게이트와 신호준위 게이트 가변범위 산출 방안에서 차이가 있다.
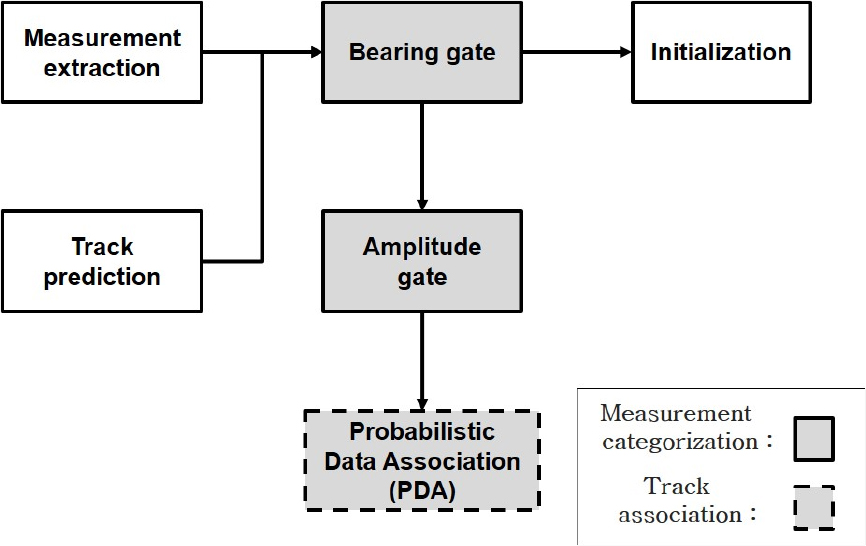
제안한 기법과 대조군 기법의 공통적인 추적 시스템에서 측정치에 대해 총 2단계의 유효게이트를 적용한다. 첫 번째 단계에서는 추적 표적의 방위 예측치를 기준으로 수평방위와 수직방위에 대한 2차원 방위 게이트를 적용한다. 두 번째 단계에서는 첫 번째 단계에서 분류한 자료결합 측정치 후보군에 대해서 추적 표적의 신호준위 예측치를 기준으로 신호준위에 대한 1차원 신호준위 게이트를 적용한다. 총 2단계의 게이트 유효범위를 적용한 후, 유효게이트 내의 측정치에 대해서 자료결합을 수행한다. Eq. (2)는 방위 게이트에 대한 표적 상태 추정을 나타내며 Eq. (3)은 신호준위 게이트에 대한 표적 상태 추정을 나타낸다. 이러한 총 2단계의 유효게이트 적용을 수식적으로 표현하면 다음과 같이 Eqs. (2)와 (3)에 베이시안 방법을 적용하여 Eq. (4)로 나타낼 수 있다.
여기에서 는 필터의 예측값이며, 는 필터의 추정값이다. 는 모든 측정치이며, 및 는 수평방위 및 수직방위에 대한 유효게이트 내의 측정치를 나타낸다. 또한, 는 신호준위 유효게이트 내의 측정치를 나타내며, 은 총 측정치 개수이다. 즉, Eq. (4)는 수평방위 및 수직방위에 대한 유효게이트 내의 측정치 중에서 신호준위 유효게이트 내에 존재하는 측정치를 최종적으로 자료결합에 활용함을 의미한다.
자료결합 기법으로 NNA, SNA, PNNA, PSNA와 같이 다양한 기법을 적용할 수 있으며, 본 논문에서는 추적의 상태추정 정확도보다는 상태추정 유지에 대한 강인성 향상에 주안점을 두었기 때문에 실험군과 대조군에 공통적으로 PDA를 적용한다. 이를 수식적으로 표현하면 다음과 같다.[1]
여기에서 는 탐지확률, 는 표적 측정치가 유효게이트 내에 존재할 확률, 는 측정치의 차원으로서 이다. 는 Eq. (1)에서의 가우시안 분포 표준편차 허용범위이고, 는 Eq. (1)에서의 필터 오차공분산에 기반하여 측정잡음과 칼만 이득을 반영한 혁신공분산이다.
III. H∞ 놈 기반 이분법 자료결합기법
본 논문에서는 고밀도 클러터 환경 내 컨포멀소나에서 수평방위와 수직방위에 대한 표적추적의 강인성을 향상시키기 위하여 필터는 H∞ 필터를 적용한다. 또한, 자료결합 게이트 기법으로서 H∞ 놈 기반의 이분법 알고리즘[21]을 적용한 게이트 범위 설정기법을 제안한다. 제안기법은 Fig. 5와 같이 나타낼 수 있고, Fig. 6은 게이트 크기 산출 기법에 대한 세부 절차를 나타낸다.
H∞ 필터는 크레인 공간에서의 KF로서 비선형 표적추적에서의 KF에 대한 대안 중 하나의 기법이다. 이를 수식적으로 표현하면 다음과 같다.[22]
여기에서 는 천이행렬, 는 공정잡음, 는 공정잡음 계수, 는 측정행렬, 는 측정잡음, 은 상태변수 측정행렬을 나타낸다. Eqs. (8), (9), (10)은 각각 크레인 공간에서 동역학 방정식과 측정 방정식을 나타낸다. 동역학 방정식은 상태를 알고자 하는 대상 시스템에 대한 모델링이며, 측정 방정식은 실제 수신한 시스템에 대한 상태이다. Eq. (10)은 시스템 상태 예측치를 측정 방정식에서 나타내는 상태의 형태로 변환한다. 상태변수 측정행렬을 별도로 표현하고 적용하는 이유는 다음과 같이 H∞ 필터에서 사전에 설정한 외란 감쇠 인자를 크레인 공간에서 모델링한 시스템에 반영하기 위해서이다. 외란 감쇠 인자가 무한대로 수렴할 때, H∞ 필터는 KF가 되고, 0으로 수렴할 때, 강인성이 향상된다.[22]
Eqs. (8), (9), (10)을 크레인 공간에서의 상태 추정을 위해 세부적으로 나타내면 다음과 같다.[22]
여기에서 는 오차공분산행렬, 는 단위행렬, 는 외란 감쇠 인자를 나타낸다.
본 논문에서 자료결합기법 내 게이트 범위를 강인하면서 가변적으로 설정하기 위하여 H∞ 놈 기반의 이분법 기법을 활용한다. 이를 위해서는 제어 이론에서의 가제어성과 가관측성을 산출하여야 한다. 일반적으로 제어 이론에서의 선형 동적 시스템은 Eq. (17)의 상태방정식과 Eq. (18)의 측정방정식으로 나타낼 수 있다.
여기에서 는 천이행렬, 는 제어 벡터 에 대한 제어 입력행렬을 나타낸다. 는 측정행렬, 는 제어 벡터 에 대한 제어 출력행렬을 나타낸다. 천이행렬 가 안정된 상태가 되려면 전달함수가 다음과 같은 H∞ 놈을 만족해야 한다.[23]
여기에서 는 전달함수를 의미하며, 는 실수, 는 행렬의 고유치 중에서 최대값을 나타낸다. 이러한 제어 이론은 표적 상태 추정에서 가관측성과 가제어성으로 연결되며, 다음과 같이 요약할 수 있다. 즉, 현재 시점의 표적 추정 상태를 다음 시점의 표적 추정 상태로 천이시킬 수 있을 때 표적 상태 추정 제어가 가능하며, 가관측성과 마찬가지로 가제어성이 불가한 경우에는 시스템의 안정성 및 성능에 문제를 발생시킬 수 있다는 점이다.[9] 시스템에 대한 가제어성과 가관측성은 시스템의 안정성을 나타내는 다음의 리아프노프 방정식을 만족해야 한다.[21,23,24,25]
여기에서 는 가제어성 그람 행렬, 는 가관측성 그람 행렬을 나타낸다.
Eqs. (20), (21)의 가관측성과 가제어성을 기반으로 H∞ 놈 이분법 알고리즘을 적용할 수 있다. 즉, H∞ 놈 기반의 이분법 알고리즘에서 엔스-글로버 공식[21],[23]을 적용하여, H∞ 필터 가제어성과 가관측성을 기반의 외부입력에 대한 H∞ 놈의 상한치와 하한치를 산출한다. 본 논문에서의 외부입력은 외란을 의미한다.
H∞ 놈 기반의 이분법 알고리즘은 Table 1과 같이 요약할 수 있다.
Table 1.
Procedure of bisection algorithm.[21]
과 은 각각 H∞ 놈의 상한치와 하한치를 나타내고, Fig. 6에서와 같이 자료결합 절차에 적용되며 다음 수식과 같다.[21]
여기에서 는 H∞ 놈이며, 은 H∞ 놈 에 대한 고유치의 총 개수를 의미한다. 일반적으로 고유치 중에서 최대치를 선택한다. 그러나, 본 논문에서는 H∞ 필터를 적용하여 크레인 공간에서의 표적의 상태를 추정한다. 또한, 이에 따라 산출되는 오차공분산에 대한 H∞ 놈을 구하는 것이므로, 고유치 중 최소치를 선택한다. 고유치 산출은 크레인 공간에서의 독립기저성분을 찾는 것과 같다. 독립기저성분은 필터를 수행하여 산출한 표적 상태의 예측치와 측정치 간의 오차공분산에 대한 독립기저성분이다. 즉, 수평방위 및 수직방위 상태 추정에서의 오차공분산에 대한 독립기저성분이다.
은 해밀턴 행렬을 나타내고, 제어 이론에서 다음 수식과 같이 표현된다.[21,23]
제어 이론에서의 Eq. (17)의 상태방정식과 Eq. (18)의 측정방정식은 H∞ 필터 Eq. (25)의 동역학 방정식과 Eq. (26)의 측정 방정식으로 연관시킬 수 있다.
H∞ 필터 Eq. (25)의 동역학 방정식과 Eq. (26)의 측정 방정식으로 해밀턴 행렬을 표현하면, 다음 수식과 같다.
여기에서 과 를 제어 이론에서의 Eq. (17)의 상태방정식과 Eq. (18)의 측정방정식 및 H∞ 필터 Eq. (25)의 동역학 방정식과 Eq. (26)의 측정 방정식으로 표현하면 다음 수식과 같다.[23]
여기에서 는 이분법 알고리즘에서의 H∞ 놈 상한치 와 하한치의 에 대한 조건 설정치로서 을 만족하는 경우, 전달함수 에 대한 H∞ 놈은 이내에서 안정된 상태를 유지함을 의미한다.[21] 본 논문에서 전달함수 는 시스템 천이행렬을 의미한다. 에는 기존 가우시안 분포 가정하의 추적 오차 공분산을 기반으로 산출하는 3- 게이트 값을 적용한다.
일반적으로 해밀턴 행렬은 에너지 분포 상태에 대한 추정을 의미하는 데에 활용되지만, H∞ 놈 기반 이분법 기법 내의 해밀턴 행렬은 추정하는 잔차의 분포에 대한 확률적인 의미이다. 본 논문에서는 표적 추적에서 H∞ 필터를 적용하고 해밀턴 행렬 을 산출함에 있어서 Eq. (18)의 제어 는 존재하지 않으므로 해밀턴 행렬 은 다음과 같이 다시 나타낼 수 있다.[23]
Eq. (30)은 H∞ 필터 Eq. (25)의 동역학 방정식과 Eq. (26)의 측정 방정식으로 표현하면, 다음 수식과 같이 표현할 수 있다.
Eq. (31)을 활용한 H∞ 놈 기반 이분법 기법을 적용하여 표적추적 자료결합에서의 게이트 크기를 산출한다.
제안기법은 Fig. 6을 기반으로 다음과 같이 요약할 수 있다. 엔스-클로버 공식을 적용하여 고밀도 클러터 환경에서의 비선형 기동 표적에 대한 상태 추정 불확실성의 상한치와 하한치를 과 로 산출한다. 또한, 산출한 상한치와 하한치에 H∞ 놈 기반의 이분법 알고리즘 절차를 적용하여 실제 표적 추적에 적용되는 게이트 크기인 을 산출하고 자료결합 게이트 범위 자동설정에 활용한다.
IV. 모의신호 시뮬레이션 결과
컨포멀 소나에 대한 해상실험 데이터 미확보 상황으로 모의로 생성한 신호를 활용하여 시뮬레이션을 수행 및 검증하였다. 모의신호 생성 설정은 다음과 같이 총 3가지 경우로 분류하여 설정하였다.
첫 번째 설정은 클러터 밀도가 타 설정에 비해 상대적으로 낮은 상황에서 표적의 신호준위가 클러터의 신호준위보다 높은 상황으로 설정하였다.
두 번째 설정은 클러터 밀도가 타 설정에 비해 상대적으로 낮은 상황에서 표적의 신호준위가 클러터의 신호준위와 동등한 상황으로 설정하여, 표적의 신호준위가 미약한 경우를 모사하였다.
세 번째 설정은 클러터 밀도가 타 설정에 비해 상대적으로 높은 상황에서 표적의 신호준위가 클러터의 신호준위보다 높은 상황으로 설정하였다. 각각의 설정에 대한 세부설정은 Tables 2, 3, 4와 같다. 실험군과 대조군 내 필터의 외란 감쇠 인자는 으로 설정하였다. H∞ 놈 기반 이분법 알고리즘의 은 시간 샘플링 인덱스 간 표적의 물리적인 이동가능 범위로 설정하였다. 또한, 공정잡음과 측정잡음은 Table 5와 같이 설정하였다.
Table 2.
Parameter details for configuration 1.
Table 3.
Parameter details for configuration 2.
Table 4.
Parameter details for configuration 3.
Table 5.
Process noise and measurement noise setting in H∞ filter.
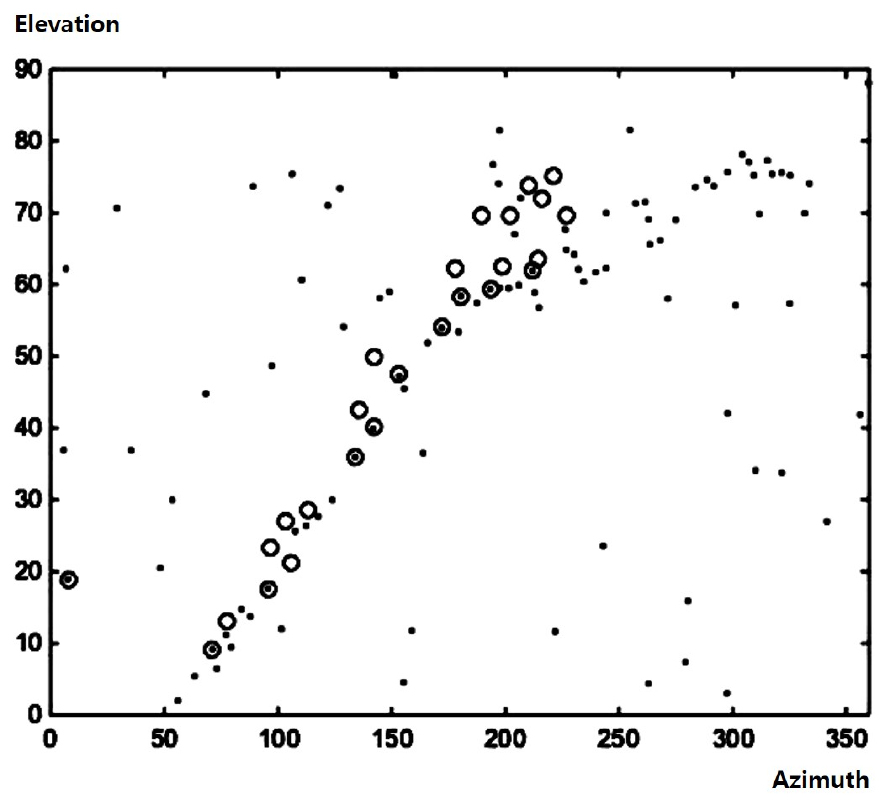
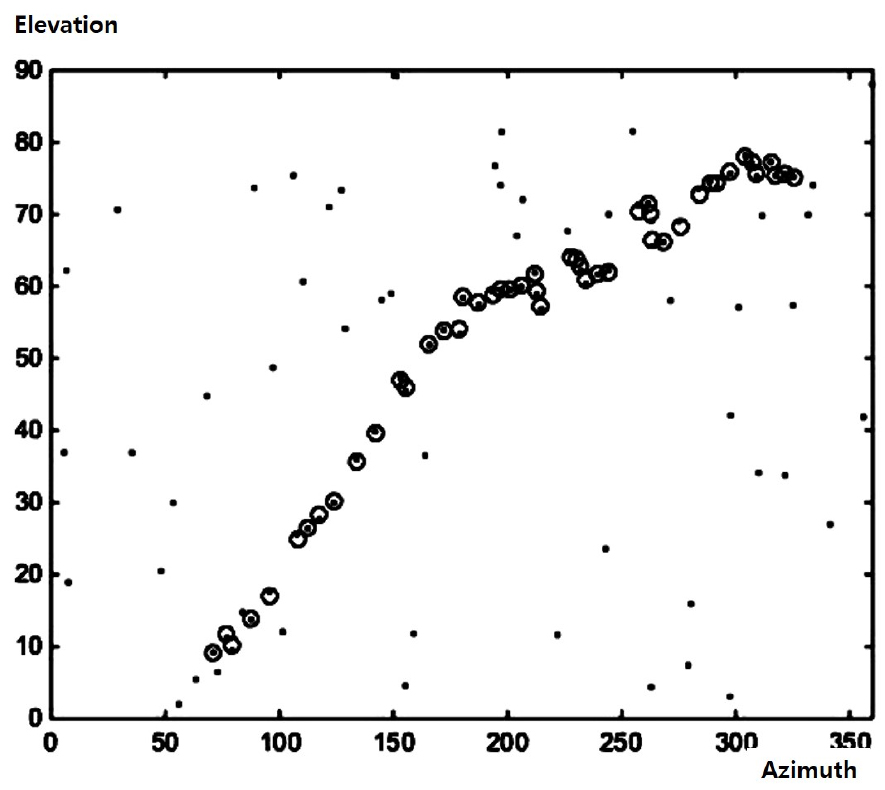
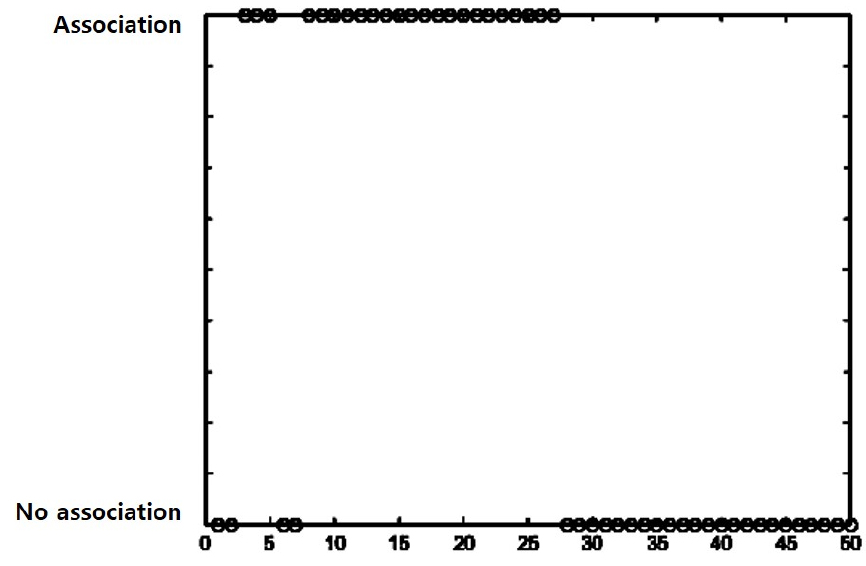
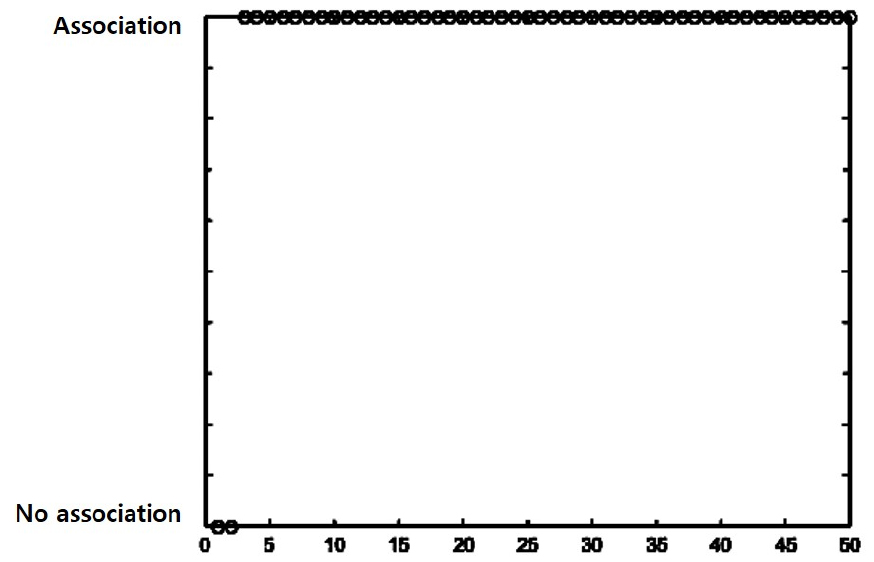
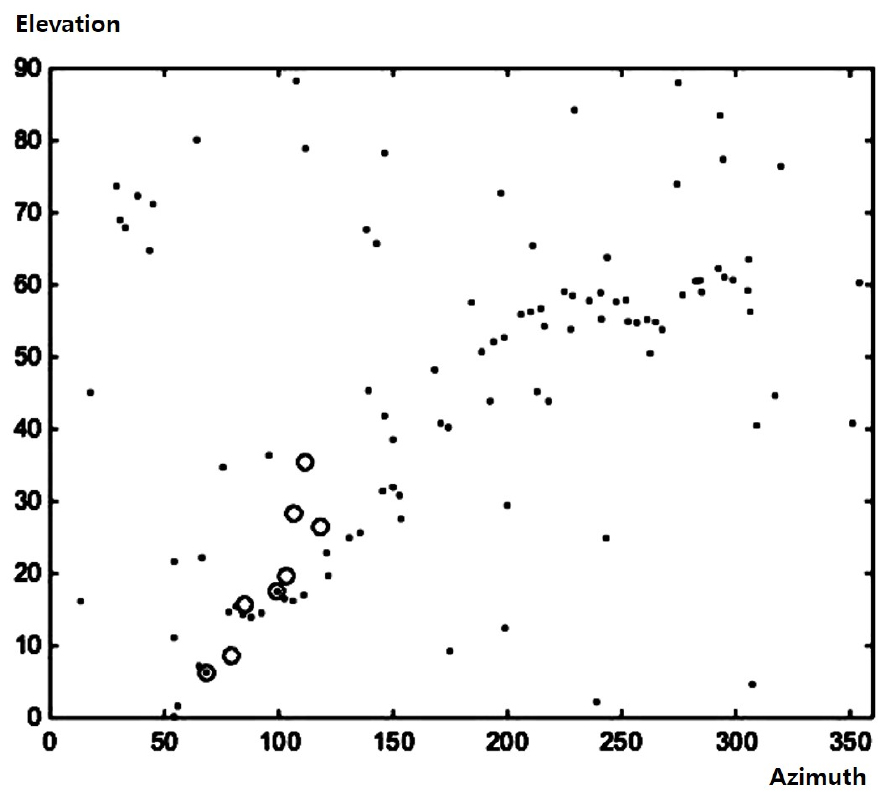
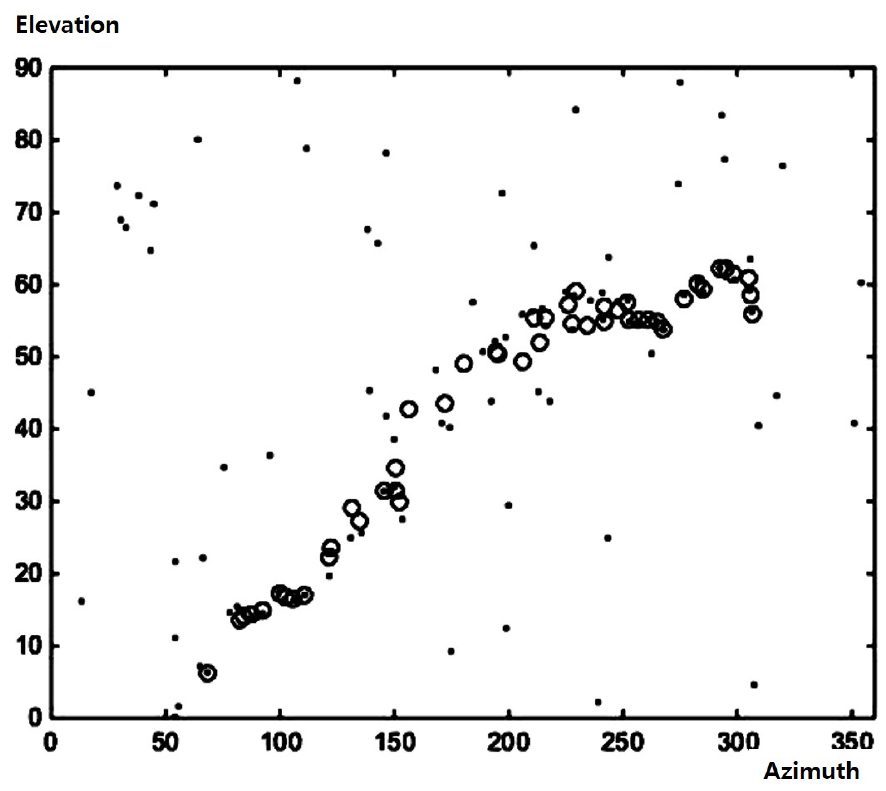
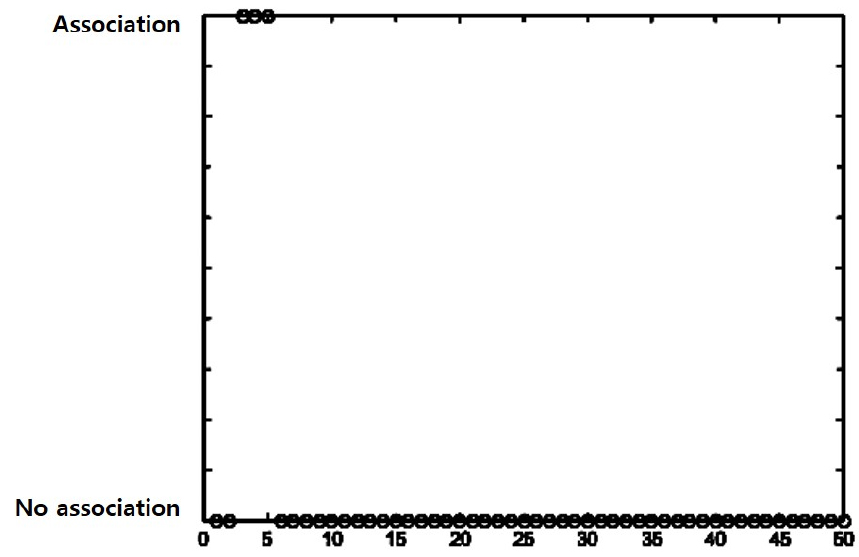
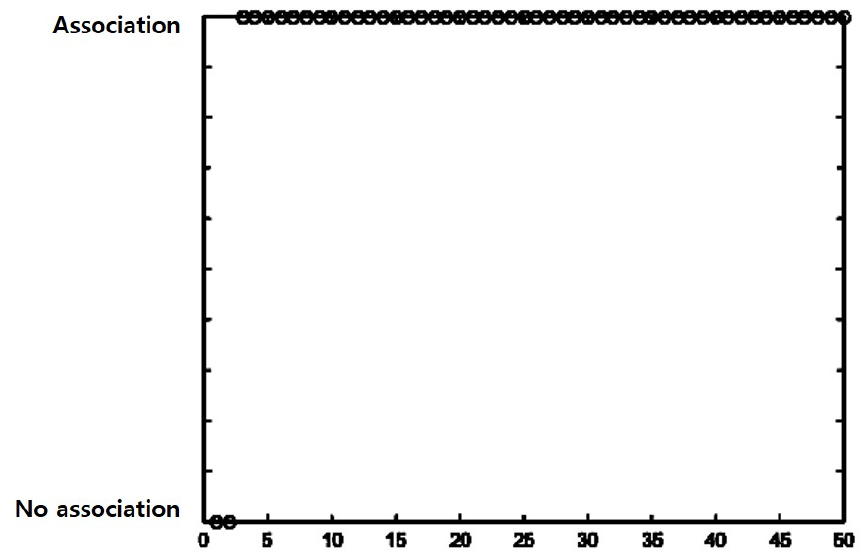
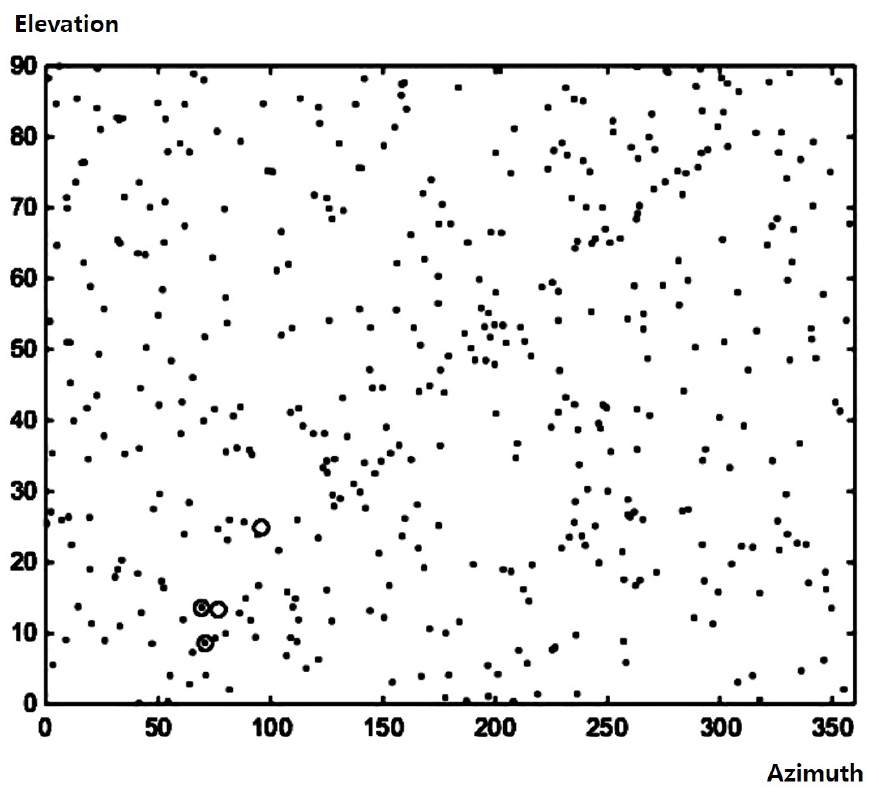
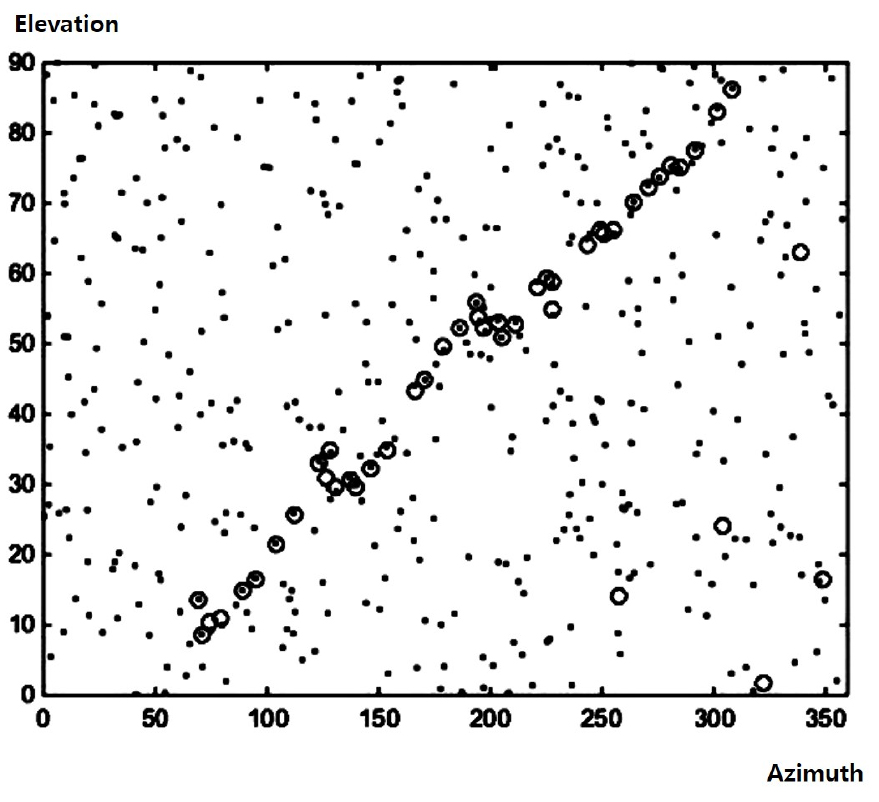
시뮬레이션 결과에서의 측정치는 점으로 표현하였고, 추적은 원으로 표시하였다. Fig. 7과 Fig. 8은 설정 1에서의 각각 기존 3- 게이트 기법과 제안 기법의 대표적인 표적 추적 결과를 나타낸다. 기존 기법에 대비하여 제안 기법에서 표적 추적 강인성이 향상됨을 알 수 있다. 설정 1에서의 표적은 클러터가 발생하는 환경에서 비선형 기동특성을 나타낸다. 기존의 3- 게이트 기법을 적용한 경우에는 클러터 발생과 함께 표적의 기동이 가속화함에 따라 추적이 소실하는 현상이 다수 발생하였다. 이는 Fig. 9에서 나타낸 바와 같이 유효게이트 내에서 측정치와의 연계가 이루어지지 않음을 알 수 있다. 제안 게이트 기법은 Fig. 10과 같이 기존 3- 게이트 기법에 대비하여 추적 연계 지속성이 향상됨을 알 수 있다.
Figs. 11과 12에서는 설정 2 내의 각각 기존 3- 게이트 기법과 제안 기법의 대표적인 표적 추적 결과를 비교한다. 제안 기법에서 표적의 신호준위가 미약함에도 불구하고 표적 추적 강인성이 유지됨을 알 수 있다.
설정 2에서의 표적은 클러터가 발생하는 환경에서 신호준위가 미약하고, 비선형 기동특성을 나타낸다. 기존의 3- 게이트 기법을 적용한 경우에는 표적과 신호준위가 비슷한 클러터의 간섭에 의해 추적 초기 시점에 대부분 소실하는 현상이 다수 발생하였다. 기존 3- 게이트 기법 적용 시, Fig. 13에서 알 수 있듯이 유효게이트 내에서 연계되는 측정치가 다수 없음을 확인할 수 있다. 이에 대비하여 Fig. 14에서 알 수 있듯 이, 제안 기법은 유효측정치와의 연계 지속성을 향상시켰다.
Figs. 15와 16은 설정 3 내의 각각 기존 3- 게이트 기법과 제안 기법의 표적 추적 결과를 나타낸다. 제안 기법은 클러터 밀도가 높아진 환경에서도 표적 추적 강인성이 유지함을 나타내었다.
설정 3에서의 표적은 고밀도의 클러터가 발생하는 환경에서 비선형 기동특성을 나타낸다. 기존 3- 게이트 기법을 적용한 경우에는 고밀도의 클러터의 간섭으로 인하여 추적 초기 시점에 대부분 소실하는 현상이 다수 나타난다. 기존 3- 게이트 기법을 적용하는 경우, Fig. 17은 유효게이트 내에서 연계되는 유효측정치가 상당수 없음을 나타낸다. 이에 대비하여 제안 기법은 Fig. 18에서 알 수 있듯 이, 유효측정치와의 연계 지속성을 향상시켰다.
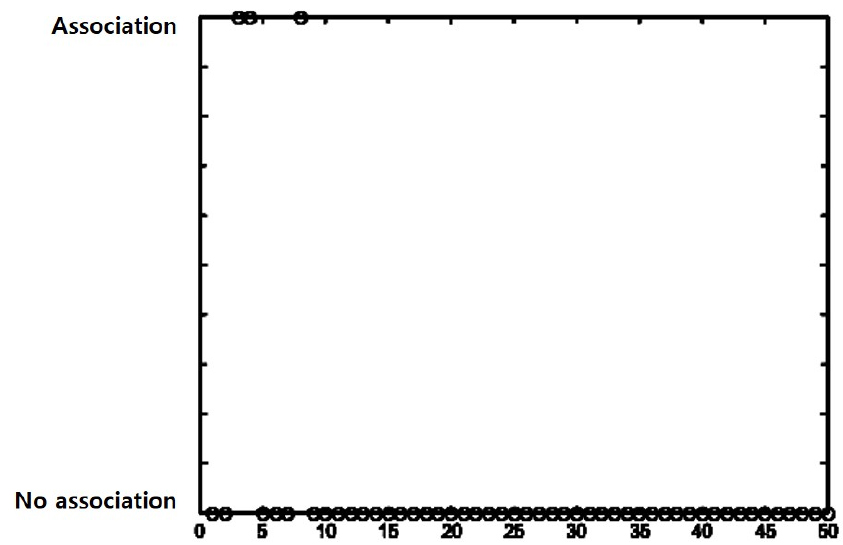
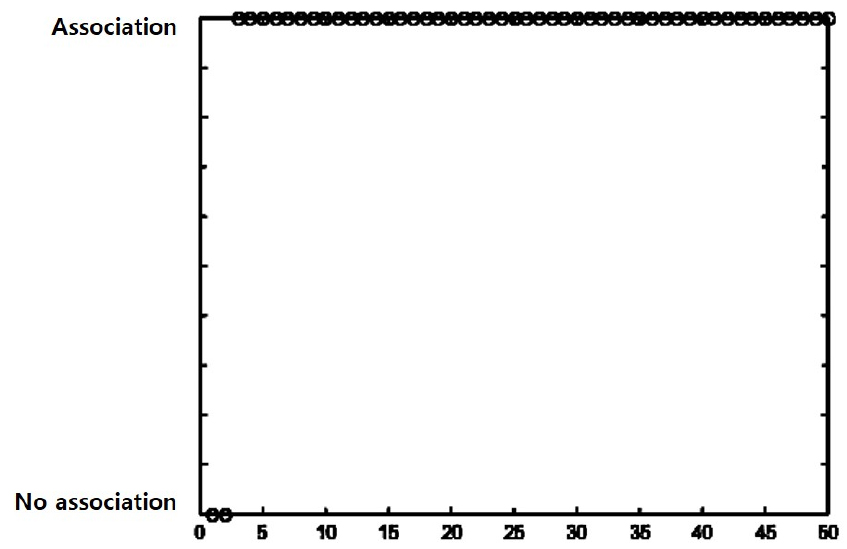
Table 6은 각각의 설정에서의 기존 3- 게이트 기법에 대비하여 제안 게이트 기법의 추적 유지 강인성 향상을 통계적으로 나타내었다. 추적 시간 샘플링 인덱스는 총 50이며 각 설정 별로 각각 100회의 시뮬레이션을 수행하였다.
Table 6.
Performance comparison in each configuration.
| Configuration | Performance improvement on tracking robustness by the proposed method |
| Configuration 1. | 62 % |
| Configuration 2. | 36 % |
| Configuration 3. | 49 % |
Table 6으로부터 알 수 있듯이 설정1-3에서 제안기법은 기존 3- 게이트 기법에 대비하여 최소 36 %에서 최대 62 %의 추적유지 성능 향상을 나타내었다.
V. 결 론
본 논문에서는 수동소나 고밀도 클러터 환경에서 H∞ 놈 이분법 알고리즘 기반의 강인하고 적응적인 자료결합 게이트 기법을 제안하였다. 기존의 게이트 기법이 게이트 크기를 가변적으로 변경하면서 자료결합을 수행하지만, 표적의 신호대잡음비가 낮거나 고밀도 클러터 환경에서는 오결합이 발생하는 상황이 다수 발생한다. 이러한 오결합을 개선하고 추적 유지 성능을 향상시키기 위해서 H∞ 놈 이분법 알고리즘을 적용하였다. 제안기법은 오결합 발생을 완화시키고 가변적으로 변경하는 게이트 범위를 더욱 강인하게 한다. 또한, 연산량 감소 및 추적 유지 성능을 향상시켰다. 추후 본 논문에서의 게이트기법을 PDA 이외의 다양한 자료기법에 적용 및 분석할 예정이며, 해상실험데이터를 활용한 추가 검증을 수행할 예정이다.
