

I. Introduction
II. Overview of DIFAR sonobuoys and the Doppler effect
2.1 DIFAR Sonobuoy
2.2 Doppler Effect
III. Formulation for Depth Estimation
IV. Simulation Results
V. Conclusions
I. Introduction
Acoustic information on an underwater target has been essential to detect, localize, track, and attack targets in ASW (Anti-Submarine Warfare) since World War II. Recently acoustic information such as bearing, range, and frequency of a target, which is required to conduct ASW, has been provided for operators through DIFAR (Directional Frequency Analysis and Recording) and/or DICASS (Directional Command Activated Sonobuoy System) sonobuoy. Sonobuoys are usually classified into two categories; active and passive. Active sonobuoys emit pings into water and receive the reflected echo from a target, which provides bearing and range data. This information is sent to a receiving aircraft via VHF (Very High Frequency) radio. The DICASS sonobuoy corresponds to active one. Passive sonobuoys, however, just listen for the acoustic signals generated by submarines’ propellers, reduction gears, and auxiliary units such as generators and compressors, without the emission of sound enable covert searching and tracking of a target. The DIFAR sonobuoy corresponds to passive one. The detection probabilities and contact ranges of a target are highly dependent on the oceanic environments and geometrical relationship between the target and sonobuoys due to the nature of underwater sound propagation such as refraction, reflection, and scattering.
A good deployment of underwater sensors in proper positions leads to success in ASW. Furthermore, knowing the depth of target is a good advantage in the ASW. Up to now, however, the estimation of a target’s depth and the decision on the deploying depth of a sonobuoy have been dependent on the experience and skill of acoustic operators of airborne assets. In some literature,[1],[2] the depth estimation using a Lloyd’s mirror effect was presented. In most cases, the Lloyd’s mirror effect occurs when the phase difference between the direct and reflected paths of sound is constant, i.e. they are coherent. The coherence typically takes place under the circumstances in which the distance between the source and receiver is sufficiently short to keep the influences of wave activities and turbulence minimal and the sea surface is smooth enough to make the amplitudes of the direct and reflected paths approximately equal.[2] The sea conditions around the Korean Peninsula, however, are not always smooth enough to get a definite interference pattern, especially in winter. Furthermore, the contact range of a target is very short, which may not provide a receiver with enough strength of reflected sound to form coherent interference. Theses factors make it difficult to exploit the Lloyd’s mirror effect in extracting depth information as the target transits past the closest point of approach CPA (Closest Point of Approach).
In this paper we propose a possible solution to the depth estimation of an underwater target utilizing the contact information from DIFAR sonobuoys even in situations in which the Lloyd’s mirror effect does not occur. Chapter 2 gives an overview of DIFAR sonobuoys and the Doppler effect for depth estimation. Chapter 3 provides the formulation for depth estimation of a target, employing the information from DIFAR sonobuoys. Chapter 4 describes simulation results, which illustrates variations of performance of the algorithm as the horizontal and vertical ranges change between a DIFAR sonobuoy and its target.
II. Overview of DIFAR sonobuoys and the Doppler effect
This chapter gives an overview of DIFAR sonobuoys and the Doppler effect, which constitute the basis for the depth estimation of underwater targets.
2.1 DIFAR Sonobuoy
The DIFAR sonobuoy is an expendable, passive acoustic sensor used usually by Navy airborne platforms to search, localize, and classify submarines. It provides operators with directional and frequency information on signals of interest emitted from submarines. Furthermore, it can be used to derive a submarine’s position by carrying out a triangulation using more than two contact bearings at the same time. The acoustic information transmitted from a DIFAR sonobuoy to the on-board analysis system is typically displayed in the form of a LOFAR (Low Frequency Analysis and Recording) gram, which shows a frequency spectrum as a function of time, as well as in the form of a contact bearing to the signal that originates from the submarine.[3]
2.2 Doppler Effect
The Doppler effect is the change in frequency of all kinds of waves for a receiving sensor moving relative to its source. The amount of frequency shifts are proportional to the relative velocities among the target, the receiver, and the medium.[4]
Doppler information, including the frequency spectrum, gained from the hydrophone of a DIFAR sonobuoy can be analyzed and utilized in real time through the on-board system of airborne assets to provide course and speed of underwater target as well as its identity.
Assuming that the velocities of a target and the DIFAR sonobuoy with respect to the medium are much lower than that of sound wave in the medium, the relationship between received frequency f and radiated frequency is given[4] as
| $$f=\left(\frac{c\pm V_{di\;far}}{c\pm V_{r\;adial}}\right)f_0,$$ | (1) |
where c is the velocity of a sound wave in the medium, is the velocity of the DIFAR sonobuoy, is the velocity of the underwater target.
The Doppler effect is typically utilized for measuring the rate of change of movement such as the velocity of a moving vehicle, blood flow measurement in medical imaging, etc.[4] In literature, however, the Doppler effect, which was measured by passive acoustic sensor, was utilized to measure the range of a moving object.[5]
In the following chapter, the Doppler effect is used to measure the slant range between a hydrophone and an underwater target at CPA.
III. Formulation for Depth Estimation
The formulas for target depth estimation can be derived with certain assumptions as follows
1) The target moves with constant course and speed without any evasive maneuvers.
2) The depth of the target is constant.
3) The fundamental frequency() are known.
4) The speed of the target is known by way of successive its positions gained by DIFARs and elapsed time.
5) The difference of DIFAR sonobuoy’s contact bearings, i.e. the bearing at CPA and the bearing prior to CPA, is small enough to validate the small angle approximation applied to derive Eq. (2).
The depth of the target relative to the hydrophone of a DIFAR sonobuoy can be calculated by the trigonometric relationship given the slant range() and horizontal range() from the hydrophone to the target as shown in Fig. 1.
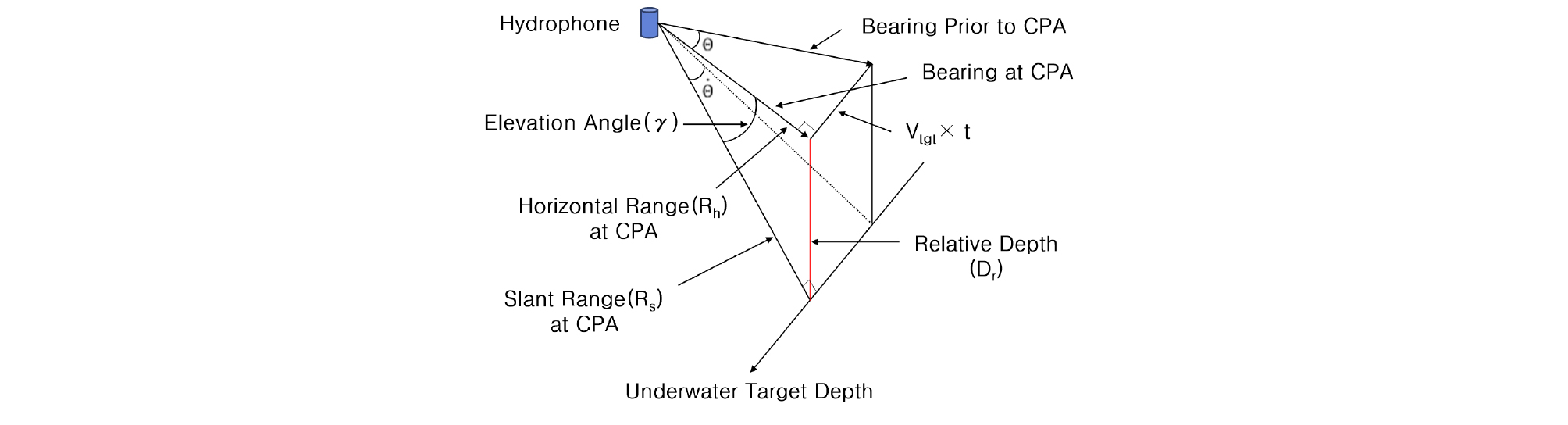
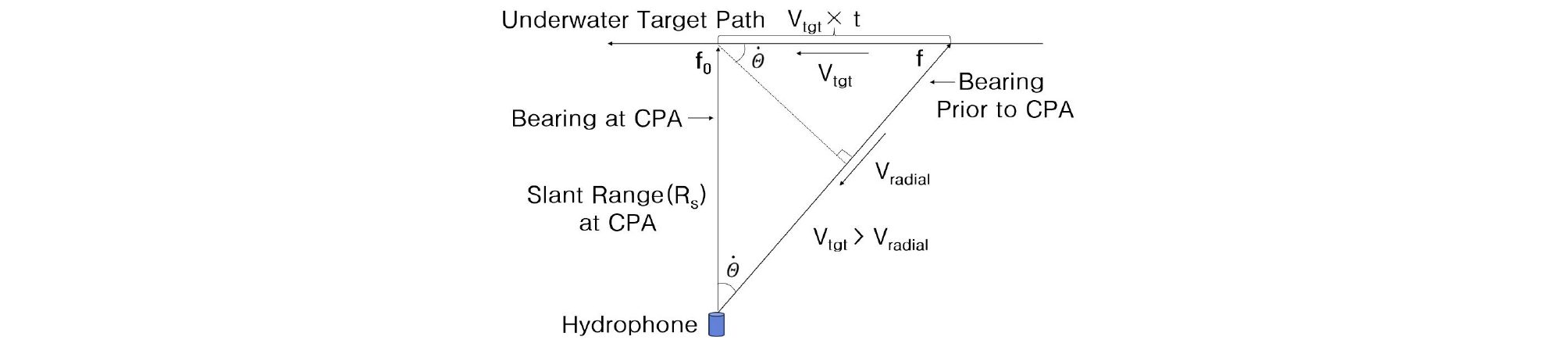
The slant range() can be calculated by using the Doppler effect. The Doppler speed of the target relative to the hydrophone, which is a radial speed, can be obtained using trigonometry as shown in Fig. 2 with a small angle approximation as follows
| $$V_{radial}=V_{tgt}sin\dot\Theta\simeq V_{tgt}tan\dot\Theta=\frac{V_{tgt}^2\times t}{R_s},$$ | (2) |
where and denote the apparent speed of a target relative to the hydrophone and the actual speed of the target, respectively, while and t indicate the bearing difference and elapsed time between contacts at CPA and before reaching the CPA, respectively. The occurrence of a CPA can be determined by LOFAR gram of the DIFARs.
To hold the small angle approximation valid, the or t should be as small as possible. The can also be derived in terms of the change of frequency from the well known Doppler equation like Eq.(1). Since the is negligible compared with the c and , Eq. (1) can be expressed as
Furthermore, because the term in Eq. (3) is almost zero, Eq. (3) can be re-expressed as
| $$f=\left(1+\frac{V_{radial}}c\right)f_0.$$ | (4) |
Rearranging Eq. (4) yields the in terms of frequency and sound speed as
| $$V_{radial}=\frac{(f-f_0)}{f_0}\times c.$$ | (5) |
Taking the derivatives of Eq. (2) and Eq. (5) with respect to time yields following equations
| $$\frac{dV_{radial}}{dt}=\frac{V_{tgt}^2}{R_s},$$ | (6) |
| $$\frac{dV_{radial}}{dt}=\frac{df}{dt}\times\frac c{f_0}.$$ | (7) |
Setting Eq. (6) and Eq. (7) equal and rearranging it yield the slant range() equation as
| $$R_s=\frac{V_{tgt}^2\times f_0}{{\displaystyle\frac{df}{dt}}\times c}=\frac{V_{tgt}^2\times f_0}{f_{sr}\times c},$$ | (8) |
where the subscript sr denotes the shift rate. The horizontal range() can be easily calculated using the difference(𝛩) of DIFAR contact bearings on the display of acoustic signal processing system as
| $$R_h=\frac{V_{tgt}^{}\times t}{\tan\theta}.$$ | (9) |
Finally, the depth of target relative to the hydrophone, , can be obtained from Eq. (8) and Eq. (9) using the Pythagorean theorem as
| $$D_r=\sqrt{R_s^2-R_h^2}.$$ | (10) |
Since the Eq. (10) provides operators with a relative depth of target, the operator can not tell whether the target is located above the hydrophone or below. To eliminate this ambiguity, another DIFAR sonobuoy, which is set to a different depth, is required. In this case, there are 4 possible combinations as shown below
where the , , , and represent the hydrophone depth of the 1st sonobuoy, the hydrophone depth of the 2nd sonobuoy, the depth of target relative to the 1st hydrophone, and the depth of target relative to the 2nd hydrophone, respectively. Comparing each combination, there are two which have the same or similar value each other. Then, the estimated absolute depth of target will be given by averaging these two values.
IV. Simulation Results
Simulations are conducted under the condition that a target moves at a constant speed with no course and depth change. For verification of the performance of the algorithm, actual maneuver data of a real submarine in the real world are used to be compared with the results of simulation. That is, the data such as contact bearings, frequencies, and speeds obtained from the real submarine maneuvering with constant speed, course, and depth as specified in Table 1 are used for simulations. And the averaged underwater sound speed measured from a depth of upper sonobuoy to that of lower one, assuming that submarine is positioned between both the depth as usual, is applied for simulation. As a geometrical relationship between the underwater target and sonobuoy is a critical factor of the performance, simulations are focused on the errors caused by a geometrical relationship to verify the availability of the algorithm to the real world applications by comparing it with the data from actual submarine. The simulations are conducted with regard to performance variations with changes of horizontal range, while keeping relative depth between the underwater target and sonobuoy constant, and performance variations with changes of relative depth, while keeping the horizontal range constant. The frequencies, contact times, and bearings at the CPA and prior to CPA, and the speed obtained from underwater target are utilized for simulation. Table 1 is an example of input parameters for simulation.
Table 1. Input Parameters for simulation.
| Time | Bearing | Frequency | Speed | Sound velocity | |
| Prior to CPA | 10 h 11 m 50 s | 106° | f0 + 0.19 | 5.9 kts | 1503 m/s |
| CPA | 10 h 12 m 10 s | 116° | f0 |
The simulation results show that the performance of the algorithm is subject mainly to the elevation angle (γ), which is the angle between the horizontal contact bearing line and the slant one, and the small angle approximation applied to Eq. (2). For the elevation angle (γ), Fig. 3 illustrates the estimation error, difference between actual depth of the underwater target and estimated depth, increases with the horizontal range, while it decreases with the vertical distance as shown in Fig. 4.
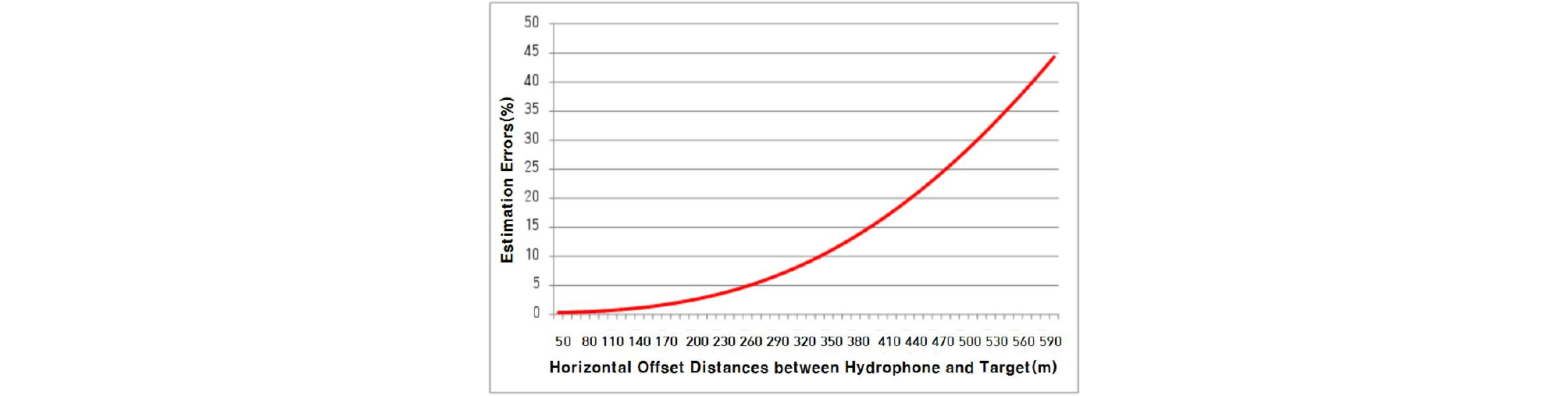
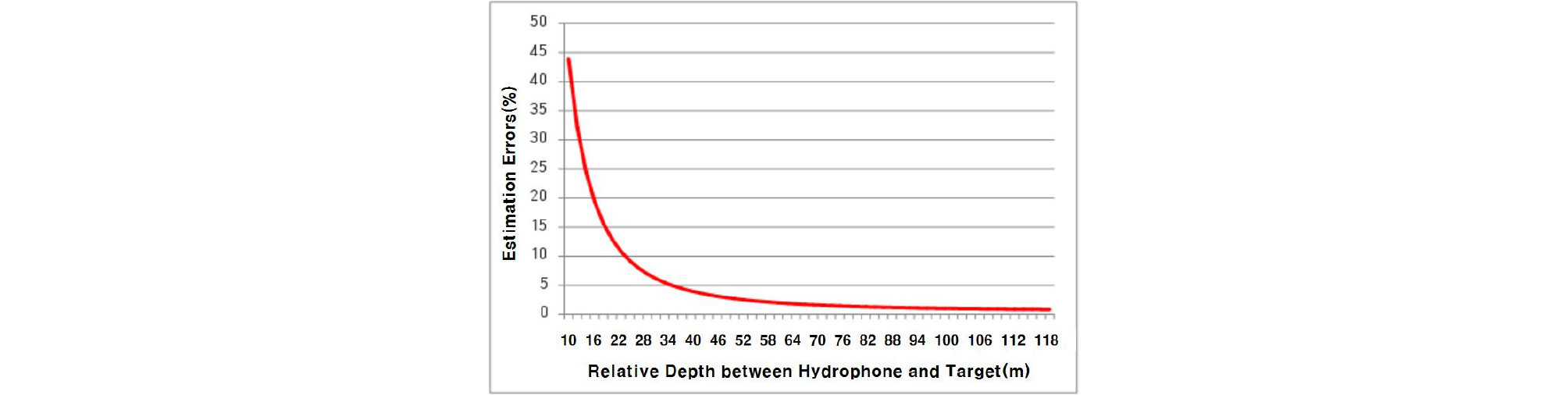
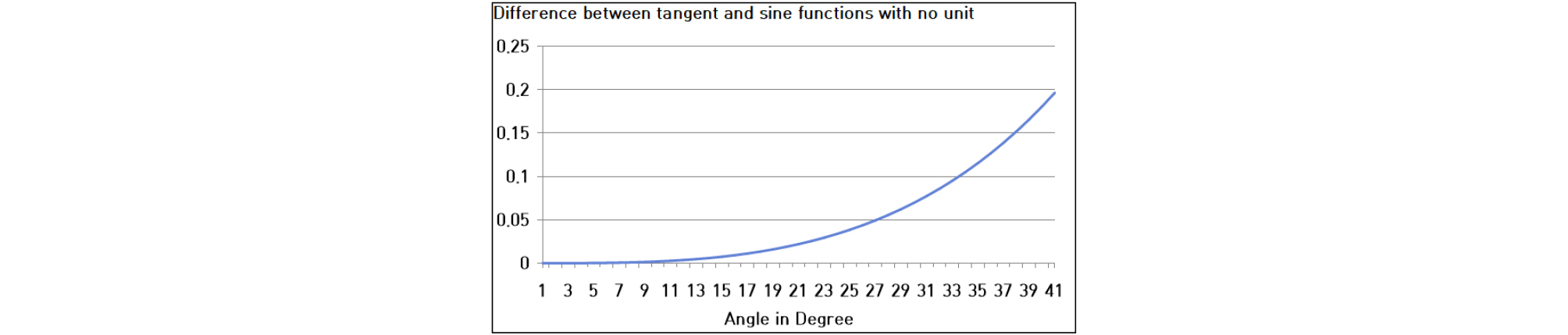
This is due to the small angle approximation, which is applied to Eq. (2). In Figs. 1 and 2, as the elevation angle (γ) increases, 𝜃' becomes smaller, making the error of the small angle approximation in Eq. (2) small. The elevation angle (γ) should be greater than a value of 7° to obtain an operationally useful performance with an error of less than 5 %. For small angle approximation, the discrepancy between trigonometric values, tan𝜃' and sin𝜃' applied to Eq. (2), begins to increase rapidly beyond the value of 10° as shown in Fig. 5. this indicates that an interval of reading contact information such as the bearing at CPA and the bearing prior to CPA on the display of the acoustic system is important and it should not exceed 10° in order to attain a level of performance applicable to real world operations.
V. Conclusions
In this paper a method has been proposed which can provide operators involved in ASW with a means to estimate the depth of an underwater target by exploiting the information gained from DIFAR sonobuoy irrespective of the existence of the Lloyd’s mirror effect. It has been shown through the simulations that care should be exercised by operators to enhance the accuracy of the estimation.
The simulation results show that the greater the elevation angle is, the more accurate the estimation of an underwater target's depth is.
