

I. 서 론
예인선배열 소나는 함정 후미에서 선배열의 음향센서를 견인하는 형태로 운용되며 음향센서 배열을 이용해 수중에서 표적으로부터 방사되는 소음을 탐지하여 표적 방위 등을 추정한다. 소나 운용 시 음향 센서에 수신되는 자체 소음은 신호 대 잡음비를 떨어뜨려 소나의 탐지성능을 저하시키는 주요 원인이 된다. 예인선배열의 경우 자함의 자체소음 영향을 줄이기 위하여 케이블을 통해 함미와 이격 거리를 두고 운용함에도 불구하고 자함의 운용 상태나 해상상태에 따라 자함 소음이 센서 신호에 유입되어 표적 신호 탐지 시 간섭으로 작용한다.[1]
수신된 신호로부터 선배열의 자체 소음을 제거하기 위한 방법은 크게 두 가지로 나뉜다. 첫 번째는 파수-주파수 스펙트럼을 통해 수신된 소음의 속도 및 전달 경로를 파악하여 신호와 소음을 분해하는 기법으로 음향 모듈에 발생하는 유동 유기 소음 등 유체 역학적 소음을 제거하는 데에 유리하지만 장비 소음이나 기계 소음 제거에는 다소 한계를 가진다.[2,3] 두 번째는 별도의 가속도계나 음향센서 등을 이용하여 자체 소음의 기준으로 삼기 위한 신호를 획득하고 적응 필터를 통해 기준 신호와 유사한 신호를 제거하는 것으로, 여러 자체 소음원을 제거할 수 있으나 획득된 기준 신호에 따라 성능이 달라질 수 있다. 본 논문에서는 두 번째 방법을 이용한 소음제거 기법을 다룬다.
선체에 설치되는 소나는 가속도계를 이용하여 직접적인 자함의 진동 소음 등을 측정하며 케이블을 통해 예인되는 선배열 소나는 음향센서를 통해 자체 소음을 획득하는 것이 일반적이다.[4] 최근에는 빔형성 신호 중 소음이 존재하는 특정 방위의 빔 신호를 선택하여 역빔형성하여 소음 신호를 제거하거나,[5,6] 암묵 신호 분리를 수행한 결과 중 소음 방위 빔과 높은 상관도를 가지는 신호를 기준 신호로 추정하여 제거하는 등 기준 소음 신호를 획득하기 위한 다양한 방법이 연구되고 있다.[7]
Normalized Least Mean Square(NLMS) 알고리즘은 입력벡터를 정규화하여 LMS 알고리즘의 발산 문제를 개선시킨 적응 필터 알고리즘으로 간단한 구조 및 적은 연산량으로 기준 신호를 이용한 소음 제거 시 널리 쓰이는 방식이다. 그러나 적응 소음제거 알고리즘은 기본적으로 기준 신호에 가까운 신호를 모두 제거하는 것을 골자로 하기 때문에 표적 신호에 기준 신호와 유사한 성분이 포함되어 있을 경우 소음과 표적 신호가 함께 제거되는 단점이 발생한다.
본 논문에서는 예인선배열 소나에 유입된 자체소음을 제거하기 위한 적응 소음 제거 기법을 제안한다. 제안된 기법은 크게 두 가지로, 기준 소음 신호를 얻기 위한 기준 신호를 생성하는 것과 적응 필터 적용 시 소음의 수신 빔패턴을 추정하여 자함 소음 제거에 활용하는 것이다. 기준 신호를 얻기 위하여 Zhang[6]은 역빔형성시 기존 조향 빔을 이용했지만, 제안기법에서는 기준 빔 대신 설치된 선배열의 음향센서 중 일부를 이용하여 별도의 빔을 형성함으로써 자함 소음의 방위 변화에 강인한 기준 신호를 획득할 수 있도록 하였다. 또한 기준 신호와 입력 신호간의 상관도를 통해 자함 소음 발생 방위를 추정하였으며, 빔패턴을 활용하여 추정된 함 소음 크기를 초과하는 성분이 제거될 경우 필터 갱신을 수행하지 않도록 하여 기준 신호와 동일한 성분의 표적 신호가 수신될 때에도 표적 신호를 보존 할 수 있도록 소음 제거 알고리즘을 개선하였다.
본 논문은 II장에서 자함 소음을 제거하기 위한 적응 소음 제거 알고리즘에 대하여 상세히 다룬다. III장에서는 소음 빔패턴을 추정하여 반영하는 기법에 대해 설명하고, IV장에서는 모의신호를 이용하여 제안한 방법에 대한 성능을 확인하였다. 마지막으로 V장에서는 본 논문에 대한 결론을 제시한다.
II. 자함 소음 제거 기법
2.1 자함 소음 기준 빔 생성
일반적으로 소나에서는 수신 신호의 신호대잡음비를 높이고 표적의 탐지 방위 해상도를 높이기 위해 수십에서 수백 개에 이르는 많은 수의 음향센서를 사용한다. 센서 채널수가 많을수록 방위 분해능을 높일 수 있으나 소음제거를 위한 기준 신호로 이용할 경우 소음원의 방위를 명확하게 파악하지 못하면 기준 신호로 사용해야할 자체 소음을 확보하기 어렵다. 함 운용 중에는 정밀한 소음 방위를 찾기 힘들 뿐만 아니라 자함 소음은 장비 및 추진기 등 여러 소음원이 복합적으로 이루어져 있기 때문에 기준 소음 획득 시 제한점이 존재한다.[4]
제안된 알고리즘에서는 선배열의 전체 음향 센서 중 자함과 가까운 거리에 위치한 일부 센서를 이용하여 자함 방향으로 빔을 형성하고 해당 빔 신호를 적응필터의 기준 입력 신호로 이용한다. 전체 센서 채널수보다 적은 수의 센서로 빔을 형성하기 때문에 기존 빔 대비 빔폭이 넓은 신호를 얻게 된다. 빔폭이 넓어짐에 따라 자함 소음 기준 신호 확보 시 조향 방위와 정확히 일치하지 않더라도 근사한 위치에 있는 소음을 획득할 수 있기 때문에 추진기, 보조기기 소음 및 유체소음 등 다소 다른 방위에서 발생하는 소음을 하나의 신호로 획득할 수 있다.
또한 선배열은 직진 기동 시에는 자함이 end-fire에 위치하지만 함 후미에서 거리를 두고 예인되므로 변침할 경우에는 자함 침로가 예인선배열보다 먼저 변경되어 자함의 위치가 end-fire에서 벗어나게 된다. 뿐만 아니라 선배열 수심 및 케이블 길이에 따라 자함의 수직 방위 또한 달라지기 때문에 빔폭이 넓을 경우 함 운용 조건에 따라 용이하게 자함 신호를 획득할 수 있으며 자함 소음을 획득하기 위한 기준 신호 빔형성 시 자함의 위치 및 변침 반경 등을 고려하여 빔 방위와 채널수, 조향방위 등을 결정해야 한다. Fig. 1은 자함이 0°(end-fire)에 위치할 때 함미에서 선배열 센서 사이 예인 케이블 길이에 따른 자함의 원뿔각 방위를 선배열 수심별로 나타낸 것이다. 그림을 통해 케이블 길이가 짧거나 선배열 수심이 깊을수록 원뿔각 효과로 인해 자함이 end-fire에 위치하더라도 0°에서 벗어난 방위에서 자함 신호가 수신됨을 알 수 있다. 따라서 기준 신호가 되는 빔의 빔폭을 넓힐 경우 운용 조건의 변화에도 소음 신호를 유연하게 획득할 수 있다.
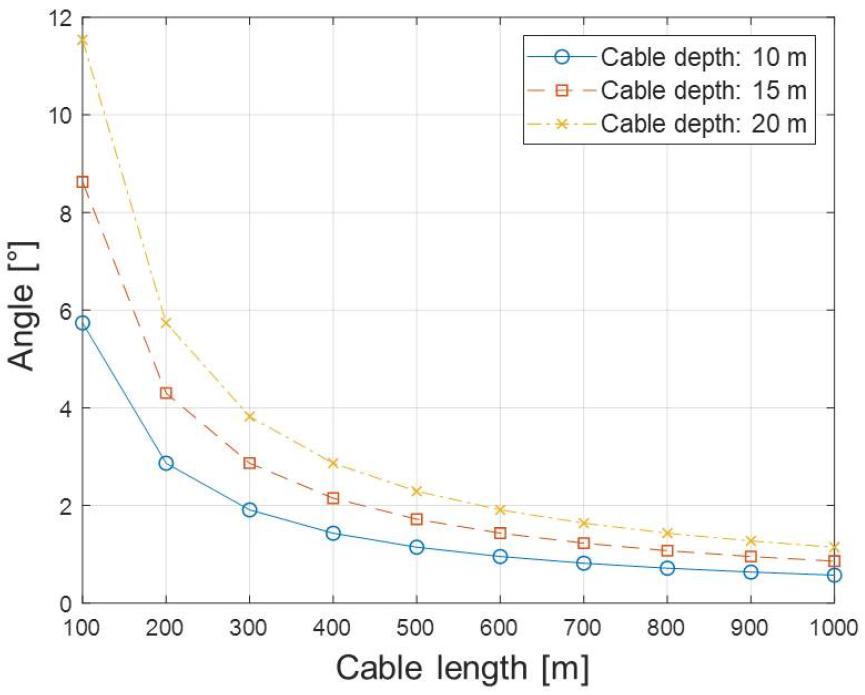
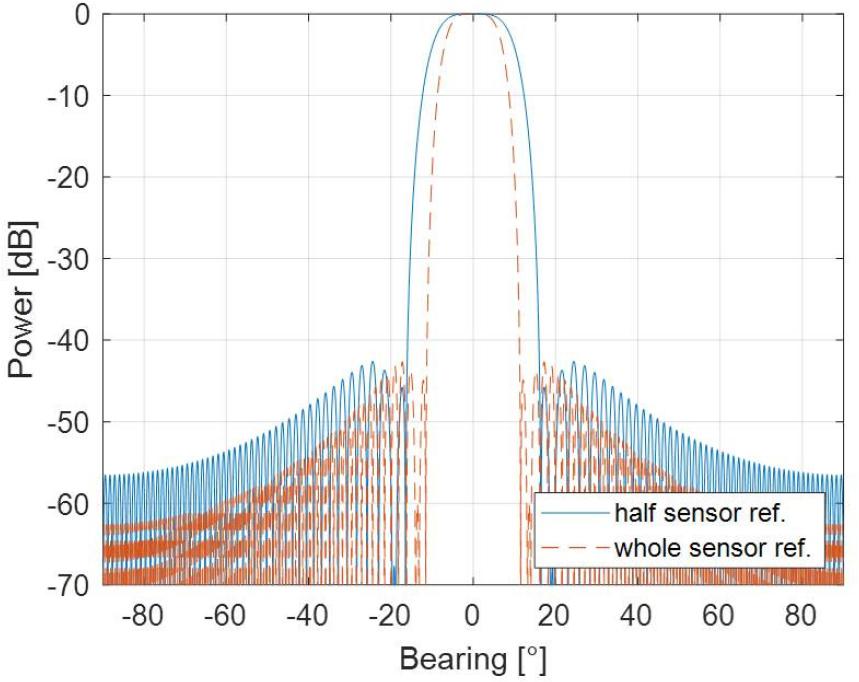
Fig. 2는 200개의 음향센서로 구성된 선배열에서 전체 센서를 이용하여 기준 빔을 형성했을 때와 함미와 가까운 절반의 센서를 이용하여 기준 빔을 형성한 경우의 빔패턴을 나타낸 것이다. 선배열 내 센서 간격은 설계 주파수의 반파장 간격, 입력 주파수는 설계 주파수를 가정하였으며 빔패턴 산출시 해밍 쉐이딩(Hamming shading)을 적용하였다. 센서 간격은 자함과 선배열이 동일한 심도라고 가정하고 함미 방향이 0°(end-fire) 일 때, 수평각 0° 방향으로 빔을 형성한 것으로 센서 절반을 이용하여 빔을 형성했을 때 전체 센서를 이용했을 때보다 약 40 % 넓은 빔폭을 가지는 것을 확인할 수 있다.
2.2 자함 소음 제거
제안 기법에서는 자함 소음을 제거하기 위하여 Magnitude-Squared Coherence(MSC) 이용 NLMS 기반 주파수 영역 적응 필터 알고리즘을 적용하였다.[8] NLMS 알고리즘은 간단한 구조와 높은 시스템 안정성으로 널리 쓰이지만 시간 샘플마다 필터 갱신이 필요하기 때문에 차수가 증가할수록 연산량이 크게 늘어나는 단점이 있다. 주파수 영역에서 NLMS 알고리즘을 수행할 경우 Fast Fourier Transform(FFT) 블록 단위로 처리되므로 연산량을 감소시킬 수 있으며, 협대역 소음을 처리할 경우 시간영역 알고리즘보다 우수한 성능을 보인다. 또한 수동 소나 탐지 시 일반적으로 FFT 처리가 수반되므로 주파수 영역에서 소음 제거를 수행할 경우 처리 결과를 역변환하는 과정이 필요하지 않기 때문에 시간영역 알고리즘에 비해 효율적으로 소나 시스템에 적용이 가능하다.
Fig. 3은 NLMS 기반 주파수 영역 적응 필터 구조를 나타낸다. 은 자함 신호를 제거하고자 하는 입력 신호로 선배열의 번째 빔형성 출력이다. 은 자함 소음 기준 신호, 와 는 와 을 FFT하여 얻은 번째 주파수 신호이다. 여기서 소음 기준 신호 은 자함 소음 기준 빔형성을 통해 얻은 신호가 사용된다.
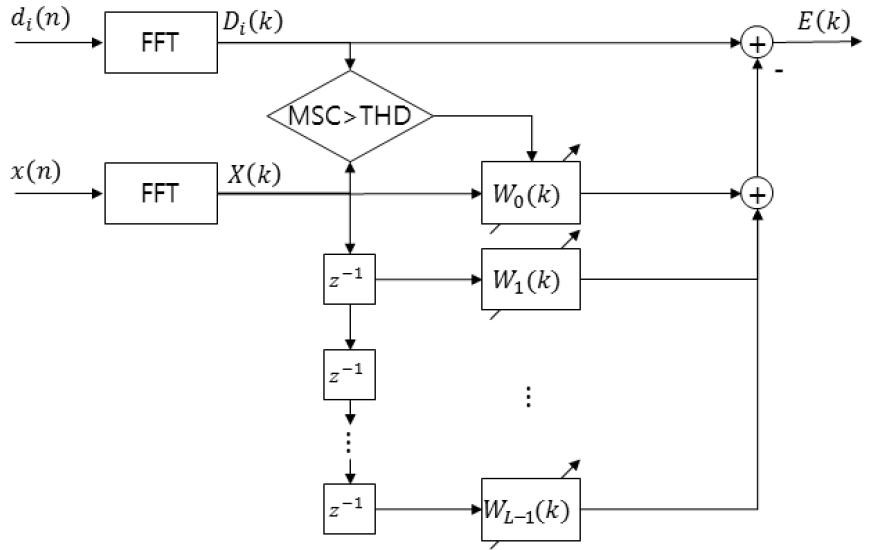
적응필터의 차수가 L차일 때 기준 신호 벡터 와 필터 계수 벡터는 다음과 같이 나타낼 수 있다.
NLMS 적응필터 갱신 수식은 다음과 같으며 여기서 는 수렴속도 조절을 위한 수렴 상수이다.
는 번째 주파수 빈에서의 오차신호로 자함 소음이 포함된 와 적용된 필터로 획득하게 되는 의 필터 출력간의 오차를 나타내며 필터 출력은 와 필터 계수 벡터간의 내적으로 산출된다.
이 때 MSC는 입력 신호와 기준 신호 간의 상관관계를 나타내는 상수로 MSC가 클수록 입력 신호에 자함 소음이 포함되어 있을 확률이 높음을 의미한다. MSC는 다음과 같이 정의된다.
, , 는 각각 과 의 교차스펙트럼 밀도, 의 자가스펙트럼 밀도, 의 자가스펙트럼 밀도이다. 적응소음제거 수행 시 매 프레임마다 MSC를 산출하며, MSC가 설정된 임계치(Threshold, THD)보다 클 경우에 한하여 Eq.(3)의 NLMS 필터 갱신이 수행된다. 임계치가 높을수록 기준 신호와의 유사성이 높은 일부 신호에 한하여 소음제거가 수행되므로 임계치 설정을 통해 소음 제거 정도가 결정될 수 있다.
위의 과정을 선배열 전 빔에 대해 수행하여 전방위 빔 소음 제거가 이루어진다. 따라서 프레임 마다 필터 계수 및 오차신호 등은 빔 별로 독립적으로 적용되며 MSC 또한 모든 빔에 대해 산출된다.
III. 빔패턴 반영 필터 갱신
적응 소음 제거 알고리즘의 기본적인 개념은 소음원과 유사한 기준 신호를 이용하여 입력신호로부터 기준 신호와 가까운 성분을 찾아 제거하는 것이다. 기준 신호가 모두 제거해야 하는 자함 성분일 경우 이 과정을 통해 정상적으로 소음을 제거할 수 있지만 자함과 표적의 운용 상태가 유사하거나 비슷한 기계류 소음 등으로 인해 탐지된 표적 신호에 자함 소음과 흡사한 성분이 있는 경우에는 표적 신호 또한 소음으로 간주되어 제거되는 문제가 발생한다.
이 문제를 해결하기 위하여 소음의 빔패턴을 추정하여 입력 빔 신호에 나타날 수 있는 최대 소음의 크기를 판별하는데 이용하였다. 입력 빔 신호 중 자함 소음은 자함이 위치한 방위의 빔 신호에서 가장 크게 나타나며, 타 방위 신호에는 빔패턴 형태를 따라 주엽 피크에서 감쇄된 성분이 반영되어 나타난다. 따라서 어떠한 방위에서 자함 소음 성분이 해당 소음의 빔패턴 준위보다 크게 수신된다면 자함 소음 이외의 신호가 함께 수신되는 경우라고 판단할 수 있다.
제안 기법에서는 자함 소음의 빔패턴을 산출하고 적응 필터를 통해 제거된 성분이 빔패턴 준위보다 작을 경우에만 소음제거 필터를 갱신함으로써 소음 제거 시 자함 소음에 해당하는 성분만 제거되도록 하였다. 앞서 설명한 바와 같이 빔폭을 넓힌 기준 빔 신호를 통해 자함 소음을 얻기 때문에 소음 제거 과정 중 사용되는 MSC를 이용해 자함 소음의 정확한 방위를 추정하고 해당 방위를 조향하는 빔패턴을 자함 소음 빔패턴으로 사용한다.
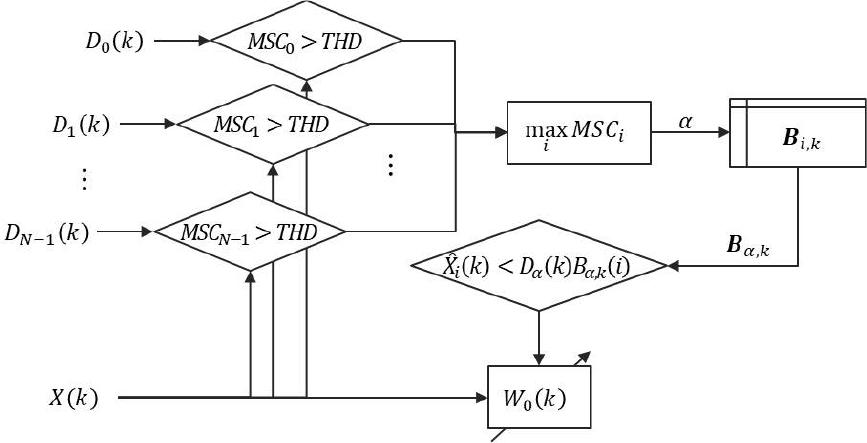
Fig. 4는 소음 신호의 방위를 찾아 빔패턴을 산출하고, 이를 반영하여 필터를 갱신하기 위한 구조를 나타낸다. N은 전 방위 빔 개수이며 간략화를 위하여 두 번째 적응필터 계수 이후는 그림에서 생략하였다. 기준 신호에 포함된 소음 성분은 소음 방위를 지향하는 빔 신호와 가장 높은 상관도를 가지므로 방위상에서 MSC 최댓값을 가지게 된다. 적응 필터는 모든 방위의 빔 신호에 대하여 수행되므로 산출된 MSC에 대하여 방위 축에서의 피크를 추출할 수 있다. 번째 빔형성 신호와 기준 빔 사이의 MSC를 MSCi 라 두면 추정되는 자함 소음 빔 는 다음과 같이 나타낼 수 있다.
주파수 영역에서 소음제거가 수행되므로 모든 주파수 에 대하여 Eq. (6)을 통하여 획득한 소음방위를 조향하는 빔패턴을 산출하며, 빔패턴은 규준화하여 사용한다. 특정 조향방위에 대한 빔패턴은 일정하게 나타나므로 조향 방위별 빔패턴을 룩업테이블로 생성하고 자함 소음 방위가 산출되면 해당하는 조향 방위의 빔패턴을 이용한다. Fig. 4에서 는 추정된 자함 소음 빔 번호, 는 번 빔 조향 시 번째 주파수 신호의 빔패턴을 나타내며 다음과 같이 표현할 수 있다.
는 번째 빔형성 입력신호에 대한 적응필터 출력으로 번 빔 신호에서 제거된 소음 성분이다. 산출된 자함 소음 빔에서 수신된 신호 크기 와 자함 소음 빔을 조향하는 빔패턴 의 곱을 통해 전방위 빔신호에서 수신되는 자함 소음의 크기를 추정할 수 있다. 따라서 입력 신호 방위에서 기제거된 성분이 추정 소음 크기보다 작은 조건에 한하여 필터 갱신이 이루어진다.
IV. 모의실험 결과
제안한 소음 제거 기법의 성능을 확인하기 위하여 모의신호를 이용한 실험을 수행하였다. 실험을 위하여 설계주파수 1,000 Hz, 채널수 200개의 선배열을 가정하였으며 자함 기준 빔은 자함과 가까운 100개의 센서를 이용하여 0°(end-fire)를 지향한 빔을 이용하였다. 선배열 내 센서 간격은 설계 주파수의 반파장 간격을 가정하였으며 빔패턴 산출시 해밍 쉐이딩을 적용하였다. 입력 빔 신호로는 영역에서 등간격으로 101개의 지연합 빔을 형성하였으며 0° ~ 180° 의 반 빔 구간을 처리하도록 하였다. 적응소음 제거 파라미터는 수렴상수 , 필터차수 로 설정하였다. 임계치는 자함 및 표적 신호 조건에 따른 실험 결과에서 통계적으로 0.5 ~ 0.7 사이에서 대부분의 소음이 제거되는 결과를 확인하여, 본 실험에서는 0.7로 설정하여 실험을 수행하였다.
먼저, 자함 소음 기준 빔 성능을 확인하기 위하여 자함 신호가 0°에서 벗어나 10°에 위치할 때 Zhang의 기준 신호 선택 방법인 입력 전방위 빔 중 하나를 기준 신호로 사용했을 때와 별도 기준 빔을 생성하여 이용하는 제안 기법을 사용했을 때의 결과를 비교하였다. 자함 소음신호는 10° 방위에 10 dB의 100 Hz, 200 Hz, 300 Hz, 400 Hz, 500 Hz 협대역 신호, 표적 신호로는 30°에 5 dB의 450 Hz, 800 Hz 협대역 신호를 가정하였으며 배경소음은 0 dB, 전달손실은 고려하지 않았다.
Fig. 5는 적응 소음 제거 이후 주파수 스펙트럼으로 Fig. 5(a)는 소음이 위치한 10°에 해당하는 빔, Fig. 5(b)는 표적이 위치한 30°에 해당하는 빔의 소음 제거 결과이다. 일점쇄선은 입력 빔 신호이며 파선과 실선은 각각 Zhang이 사용한 기준 빔과 제안한 자함 기준 빔을 기준 신호로 사용했을 때 결과를 나타낸다. 그림을 통해 제안한 기준 빔을 사용했을 경우에는 모든 소음 성분이 제거되었으나 기존 빔을 기준 신호로 삼을 경우에는 저주파수 소음 주파수 성분 일부만 제거됨을 확인할 수 있다. 이는 주파수가 낮을수록 넓은 빔폭을 가지므로 자함이 설정된 방위에서 벗어나더라도 기준 신호에 포함될 가능성이 높기 때문이다. 또한 기존 신호를 기준 신호로 사용한 경우 0° 빔 신호를 포함하는 인접 빔들에서 해당 성분들이 모두 제거되어 기준 빔 근방의 준위가 전반적으로 저하되어 보이는 현상이 나타난다. Fig. 6은 주파수-방위 스펙트럼을 나타낸 그림이며, 자함 방위 주변의 전체 빔 스펙트럼에서 동일하게 제안 기법 결과에서 소음 제거 성능이 우수함을 확인할 수 있다.
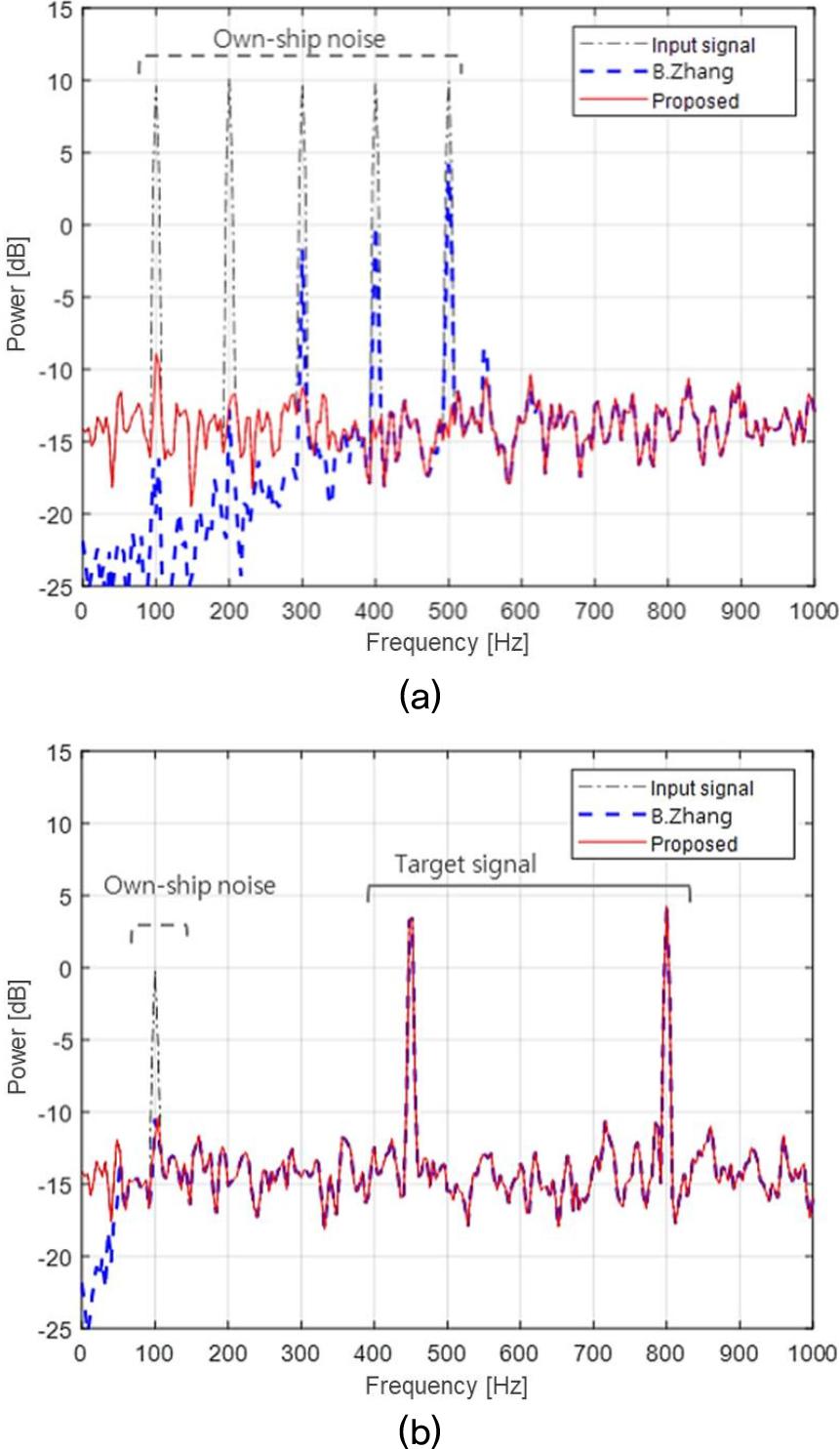
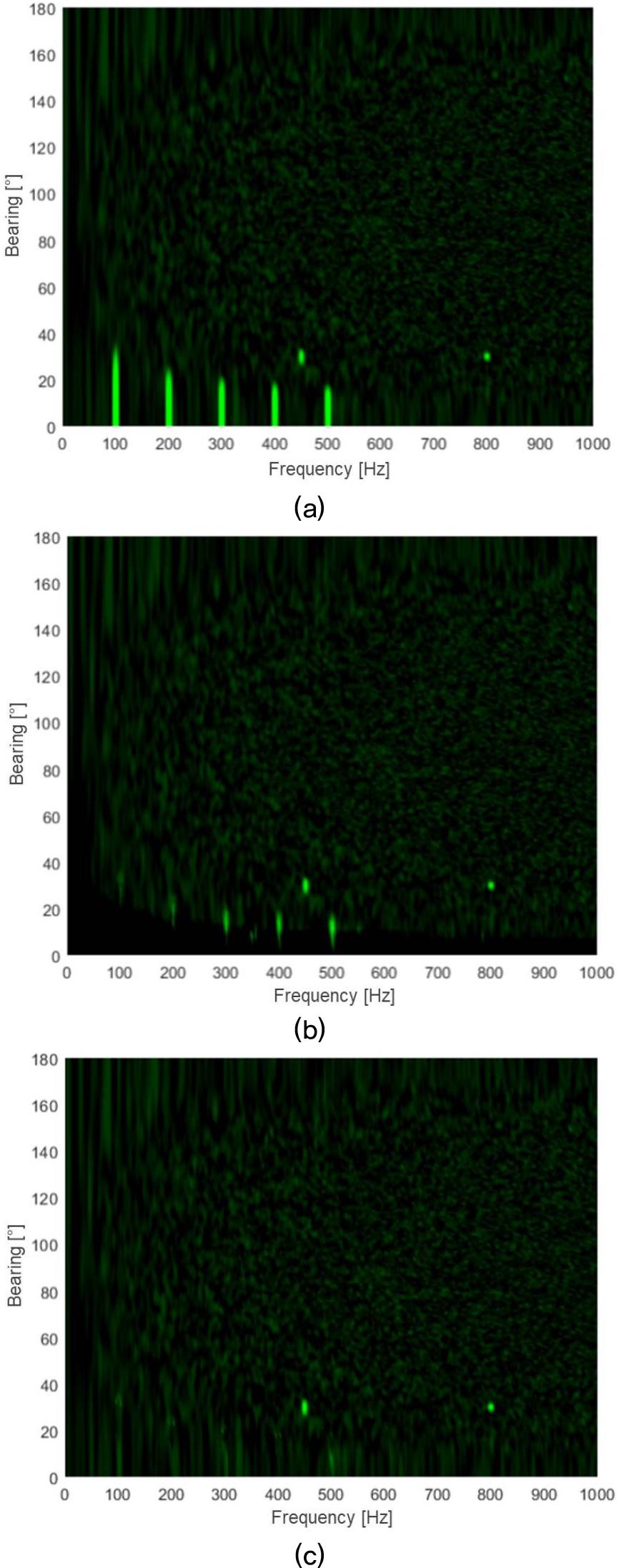
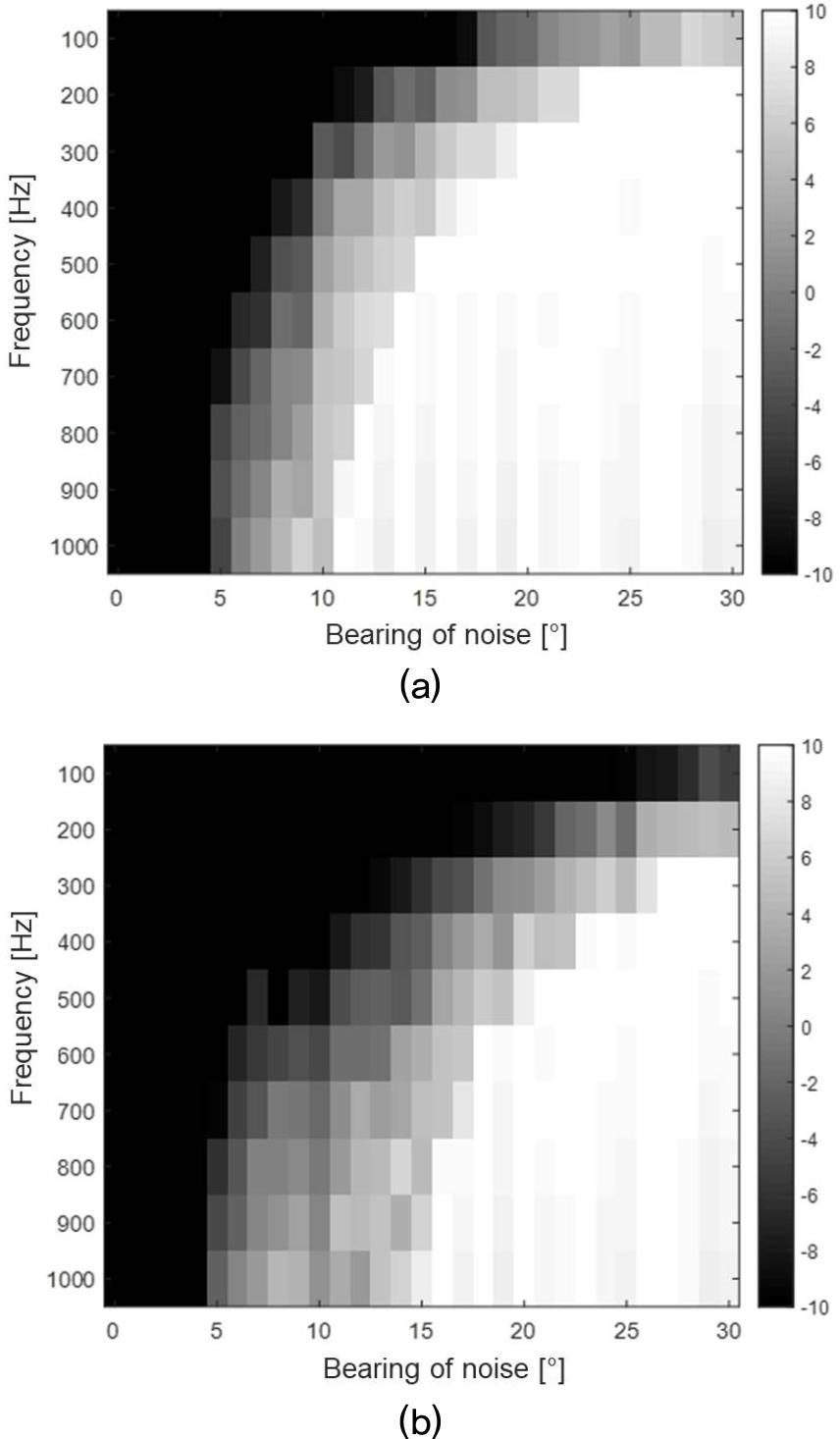
Fig. 7은 자함 소음 방위에 따른 소음 제거 성능을 확인하고자 소음 신호를 100 Hz부터 1,000 Hz까지 100 Hz간격의 주파수 신호로 가정하고 소음 발생 방위별로 제거된 주파수 성분의 크기를 도시한 것이다. 소음 수신 방위에서의 주파수 성분 준위를 나타내었으며 크기가 작을수록 소음 성분이 제거되었다고 볼 수 있다. 그림에서 확인 할 수 있듯이 제안한 기준 빔을 이용할 경우 기존 기법에 비해 소음 발생 방위가 설정 위치에서 다소 벗어나더라도 소음 제거 성능이 유지됨을 알 수 있으며, 0 dB 이하를 소음 제거 기준으로 했을 때 기존 기법 대비 자함 신호를 획득할 수 있는 영역이 40 % 증가하였다.
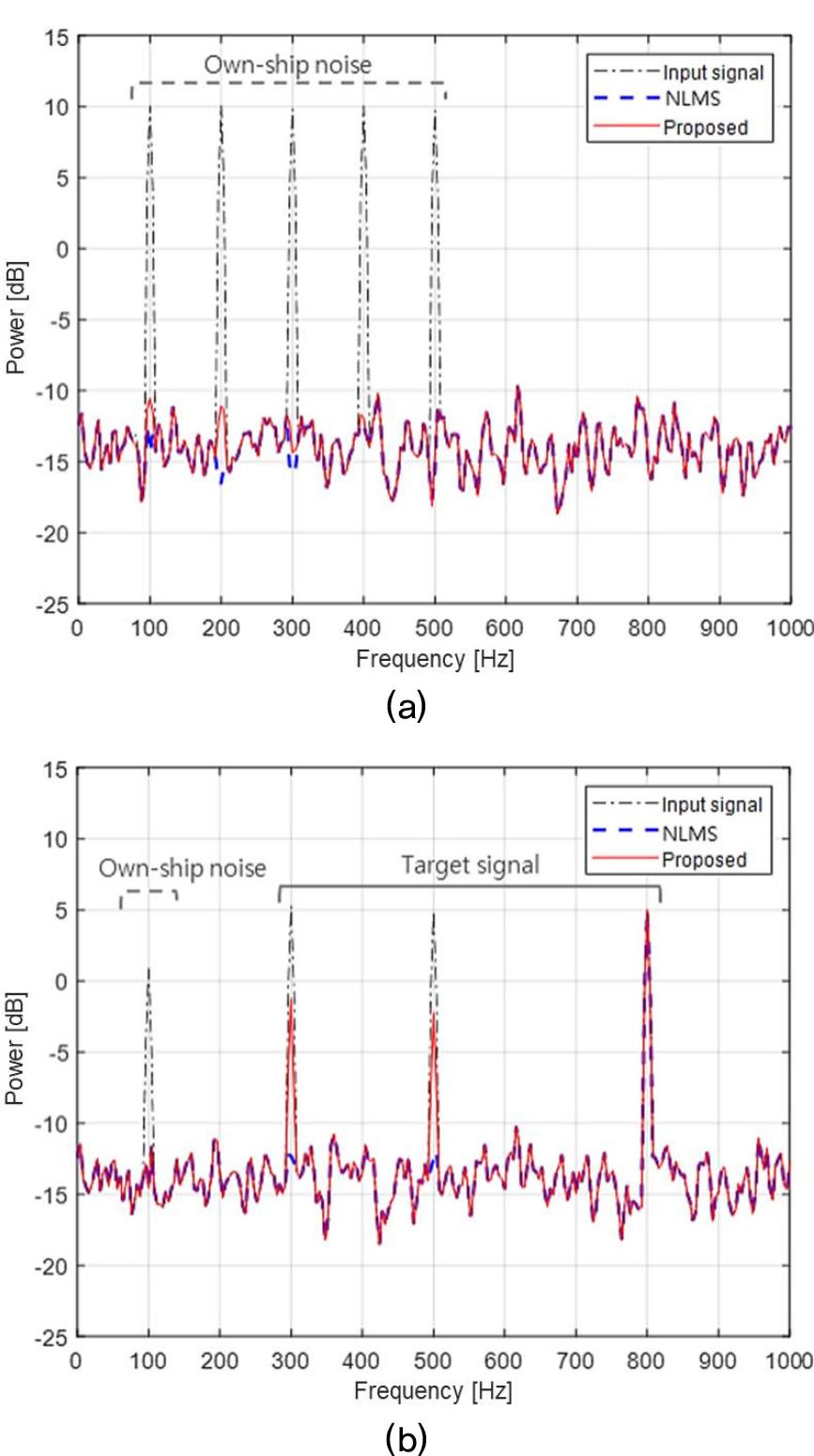
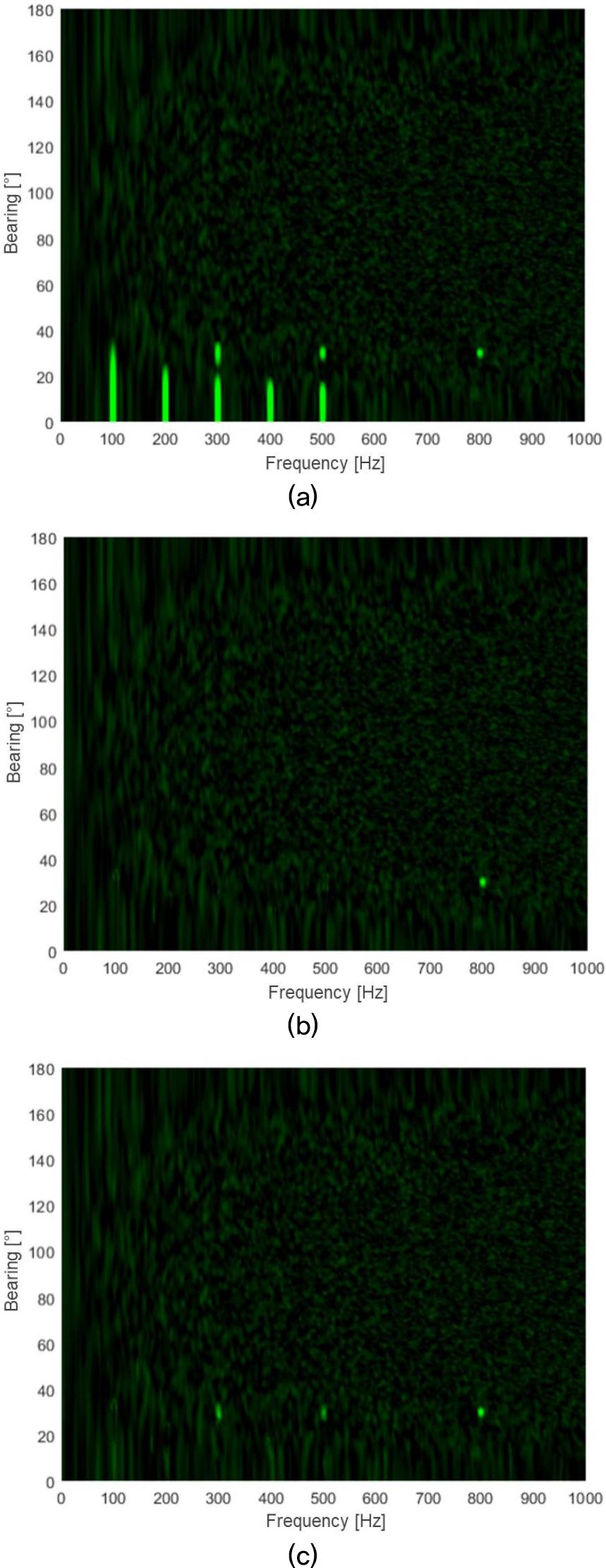
두 번째 실험으로 빔패턴 반영 필터 갱신 기법의 성능을 확인하기 위하여 표적과 소음 신호 주파수가 동일한 성분을 가질 때 NLMS 소음 제거 기법만을 사용했을 때와 제안한 빔패턴 반영 필터를 적용했을 때 성능을 확인하였다. 첫 번째 실험과 동일한 조건에서 표적 신호가 300 Hz, 500 Hz, 800 Hz 주파수인 경우에 대해 적응 소음 제거를 수행하였다. Fig. 8은 적응 소음 제거 이후 주파수 스펙트럼으로 일점쇄선은 입력 신호이며 파선과 실선은 각각 기존 NLMS 방식 소음 제거 기법과 제안 기법을 사용했을 때 결과를 나타낸 것이다. Fig. 9(a)는 자함 방위 스펙트럼으로 두 결과 모두 자함 주파수 성분이 제거되었다. 그러나 표적 방위 스펙트럼인 Fig. 9(b)의 경우 표적 신호에 자함 소음 주파수와 동일한 주파수 성분이 포함되어 있어 기존 적응소음제거 기법을 이용할 경우 100 Hz의 자함 소음 성분과 300 Hz, 500 Hz 의 표적 성분이 함께 제거되는 반면 제안 기법은 소음 제거 이후에도 자함 소음 성분이 제거되며 크기는 다소 낮아졌지만 표적 주파수를 계속해서 탐지 가능함을 알 수 있다. Fig. 9는 동일한 결과의 주파수-방위 스펙트럼으로 표적 방위 주변의 빔 스펙트럼에서 모두 동일한 결과를 보임을 확인할 수 있으며, 제안 기법이 표적 탐지 측면에서 더욱 우수한 성능을 나타낸다.
V. 결 론
본 논문에서는 예인선배열 소나에 수신되는 자함 소음을 제거하기 위한 소음 제거 기법을 제안하였다. 자함 소음 발생 방위에 강인한 기준 신호를 얻기 위하여 배열센서 일부를 이용하여 별도의 소음 기준 빔을 획득하였다. 또한 소음 제거 시 기준 신호와 유사한 성분을 가진 표적신호가 함께 제거되는 문제를 개선하기 위하여 빔 신호에 유입되는 자함 소음 준위를 추정하여 필터 갱신 여부를 결정하도록 하였다. 시뮬레이션 결과를 통해 제안한 기법이 기존 기법보다 소음 발생 방위에 강인하며, 소음 신호와 유사한 표적 신호 존재 시에도 표적 탐지가 가능함을 확인하였다.
