

I. 서 론
수중에서 음파를 이용하여 표적을 탐지할 경우 배열의 설계주파수보다 높은 주파수의 표적신호가 수신이 되면 공간 에일리어싱이 발생하여 표적신호의 방위를 추정하기가 어렵다. 이를 극복하기 위한 연구들이 현재까지 수행되어왔다.[2,3] 2012년 Abadi가 설계주파수보다 높은 주파수 대역을 갖는 신호의 방향을 추정하는 차주파수 빔형성 기법을 제안하였고, 해상실험을 통해 검증하였다. 하지만 차주파수 빔형성 기법은 차주파수의 값에 따라 빔형성 결과가 달라지는 모호성이 존재한다.[2]
본 논문에서는 주파수-파수 스펙트럼의 특성을 이용하여 배열센서의 설계주파수보다 높은 주파수 대역을 갖는 표적신호의 방향을 추정하는 기법을 제안한다. 제안된 기법은 중심 주파수를 포함한 신호의 주파수 대역 내에서 주파수 성분이 달라져도 추정된 방향이 일정하여 모호성이 없다는 장점이 있다. 주파수-파수 스펙트럼은 1969년 Capon에 의해 처음 고안되었고,[4] 주파수-파수 스펙트럼은 분석한 신호의 주파수 대역과 수신된 방향에 대한 정보를 동시에 알 수 있다. 기존의 연구에서는 배열센서의 설계주파수보다 낮은 주파수 대역에서 주파수-파수 스펙트럼을 이용하여 표적의 방위를 추정하였다.[1,4-7] 제안된 기법은 주파수-파수 스펙트럼에서 줄무늬의 기울기를 이용하여 표적신호의 방향을 추정한다. 배열센서의 설계주파수보다 높은 주파수 대역의 신호가 수신되었을 경우 공간 에일리어싱 효과에 의해 줄무늬가 파수 축에서 전이되는 현상이 일어나지만, 스펙트럼 상에서 줄무늬가 전이되더라도 기울기가 일정하게 유지되므로 표적신호의 방향을 추정할 수 있다.[8,9] 방향을 추정하는 방법으로 의학에서 이용되는 라돈변환(Radon transform)을 이용하였는데, 라돈변환은 의학에서 X-ray가 인체를 투과하여 나온 데이터를 여러 각도에서 회전시키며 각 각도별 투영 데이터를 얻는 방법이다.[10-12] 본 논문에서는 주파수-파수 스펙트럼 결과에 라돈변환을 적용하였고, 각 각도별로 회전시키며 스펙트럼 에너지를 투영하여 각도를 추정하였다.
본 연구는 배열센서의 간격이 넓어 발생되는 공간 에일리어싱 문제를 부분적으로 해결하여 기존에 제안된 지연합 빔형성 기법 및 차주파수 빔형성 기법 외의 방법을 제시하였다.
본 논문의 구성은 다음과 같다. II장에서는 주파수-파수 스펙트럼에 대한 기본 개념을 소개하고, CW(Continuous Wave)신호와 LFM(Linear Frequency Modulation)신호를 이용하여 주파수-파수 스펙트럼 시뮬레이션을 수행하며, 공간 에일리어싱이 일어나는 환경에서의 현상을 설명한다. III장에서는 주파수-파수 스펙트럼을 이용하여 표적신호의 방위추정을 위한 알고리즘 소개 및 적용에 대해 설명한다. IV장에서는 공간 에일리어싱이 일어나는 해상데이터를 이용하여 제안된 기법의 결과와 차주파수 빔형성 결과를 비교분석하였다. 마지막으로 V장에서는 본 논문의 결론을 맺는다.
II. 주파수-파수 스펙트럼
본 연구에서 표적의 방위추정을 위해 주파수-파수 스펙트럼을 이용한다. 표적에서 수신된 신호를 와 같이 정의하고, r은 배열 센서의 위치 벡터, t는 시간을 의미한다. 를 의 푸리에변환 함수로 정의할 때, 수신된 신호를 시간영역과 공간영역에서 푸리에변환을 하면 Eq. (1)과 같이 표현할 수 있다.
| $$S(k,\omega)=\int_{-\infty}^\infty\int_{-\infty}^\infty s(r,t)e^{-i\omega t}dt\;e^{-ikr}dr.$$ | (1) |
Eq. (1)을 활용하여 수신된 신호의 주파수-파수 스펙트럼을 도식화할 수 있다.
2.1 자유공간에서의 시뮬레이션
본 절에서는 CW신호와 LFM신호를 사용하여 주파수-파수 스펙트럼 분석을 수행하였다.
신호의 길이가 0.1 s이며, 3개의 서로 다른 중심주파수(700 Hz, 500 Hz, 900 Hz)를 가지는 CW신호가 서로 다른 방향(-60°, 10°, 70°)에서 수신되는 경우를 모의하였다. 수신기는 수직 선배열센서를 사용하였고, 설계주파수는 1 kHz, 총 센서 개수는 16개이며 각각의 CW신호가 수신되는 방향과 수직 선배열센서를 도식화 하면 Fig. 1과 같다.
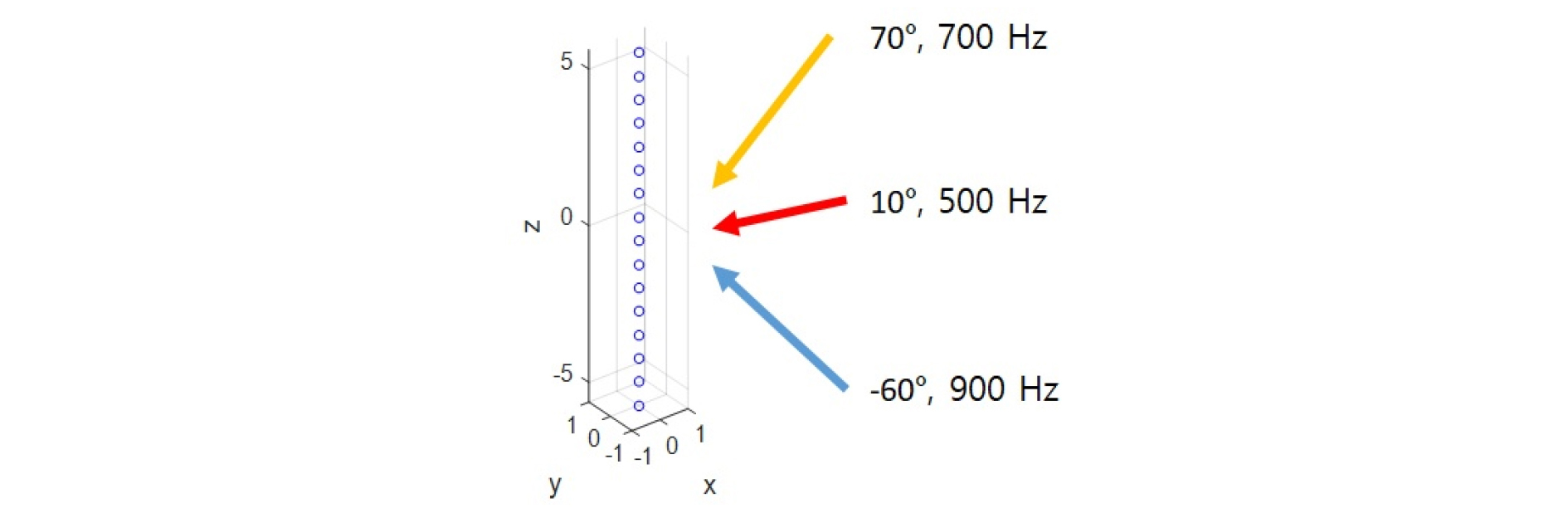
수신된 신호를 이용하여 주파수-파수 스펙트럼을 그리면 Fig. 2와 같다.
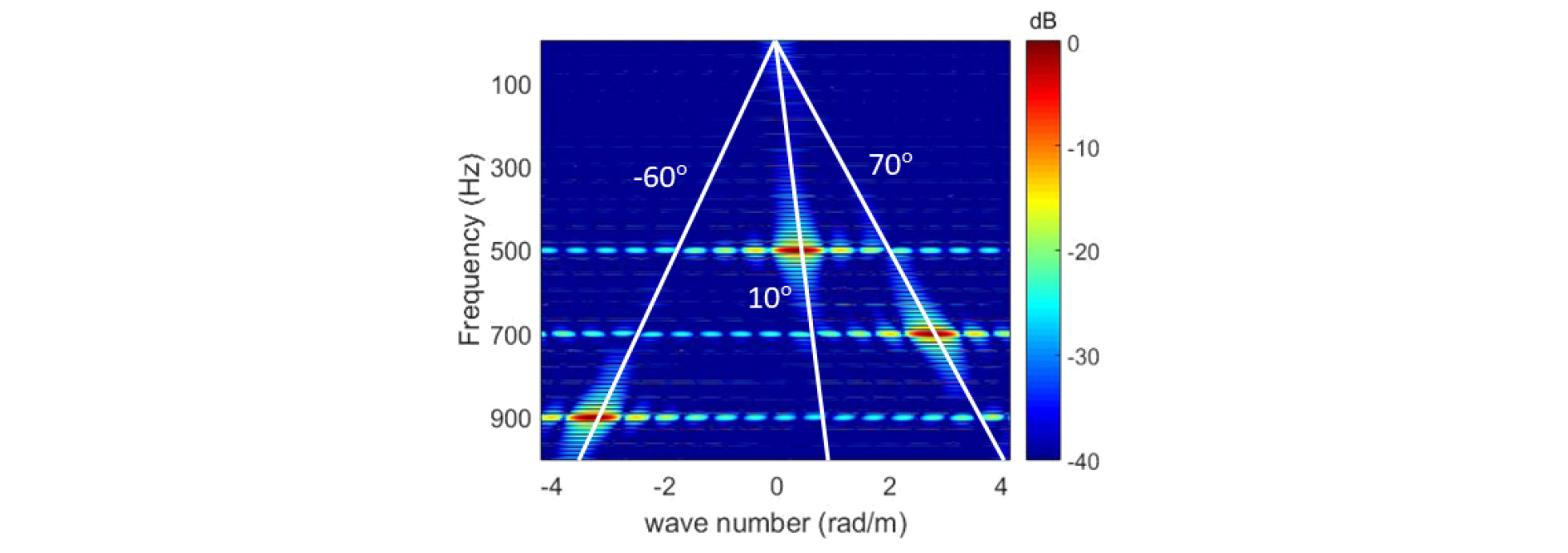
Fig. 2처럼 주파수-파수 스펙트럼을 이용하면 수신신호의 주파수 성분 및 수신되는 방향을 알 수 있는데, Fig. 2의 하얀색 실선이 나타내는 것은 신호가 들어오는 방향에 대한 정보를 의미하며, 500 Hz는 10°, 700 Hz는 70°, 900 Hz는 -60°에서 들어온 것을 확인할 수 있다. 또한 Fig. 2는 신호의 세기를 데시벨(dB)로 환산한 결과를 나타낸다.
동일한 선배열센서를 이용하여 LFM신호에도 적용하여 결과를 분석하였다. 모의한 신호는 Fig. 3과 같으며, 이는 10 Hz부터 4 kHz의 대역폭을 가지는 LFM신호이고, Tukey윈도우가 적용되었다.
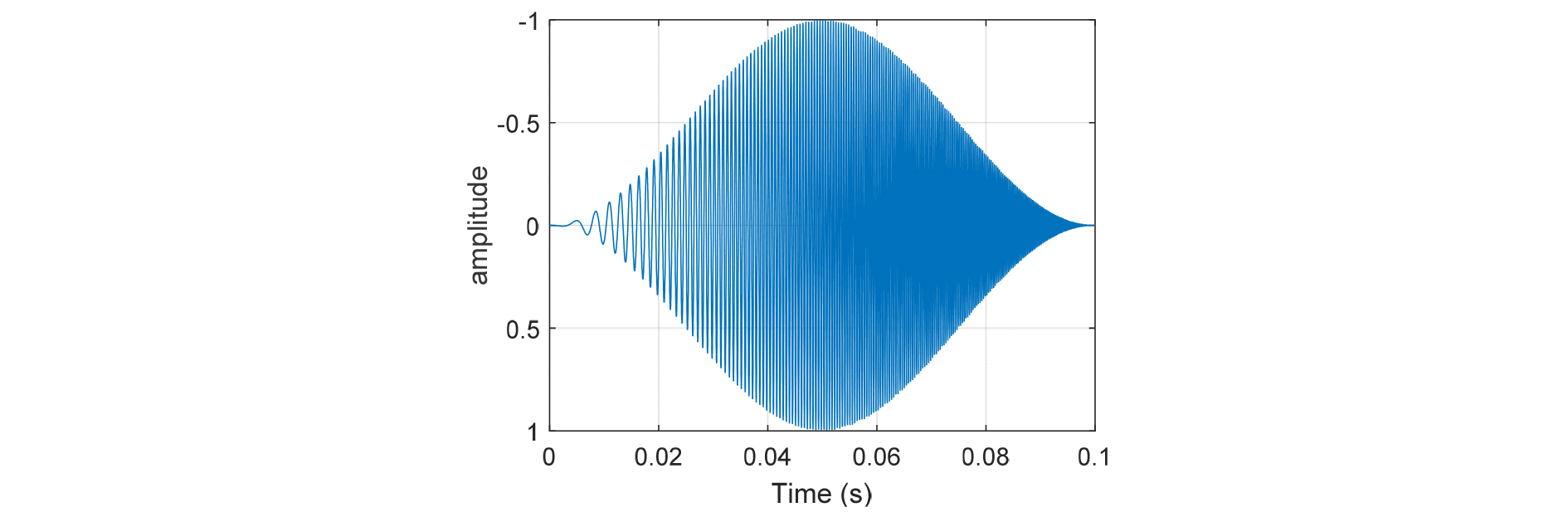
CW신호와 달리 LFM신호를 이용한 시뮬레이션에서는 하나의 방향(70°)에서 수신을 모의하였다. 수신된 신호를 이용하여 주파수-파수 스펙트럼을 도식화하면 Fig. 4와 같다.
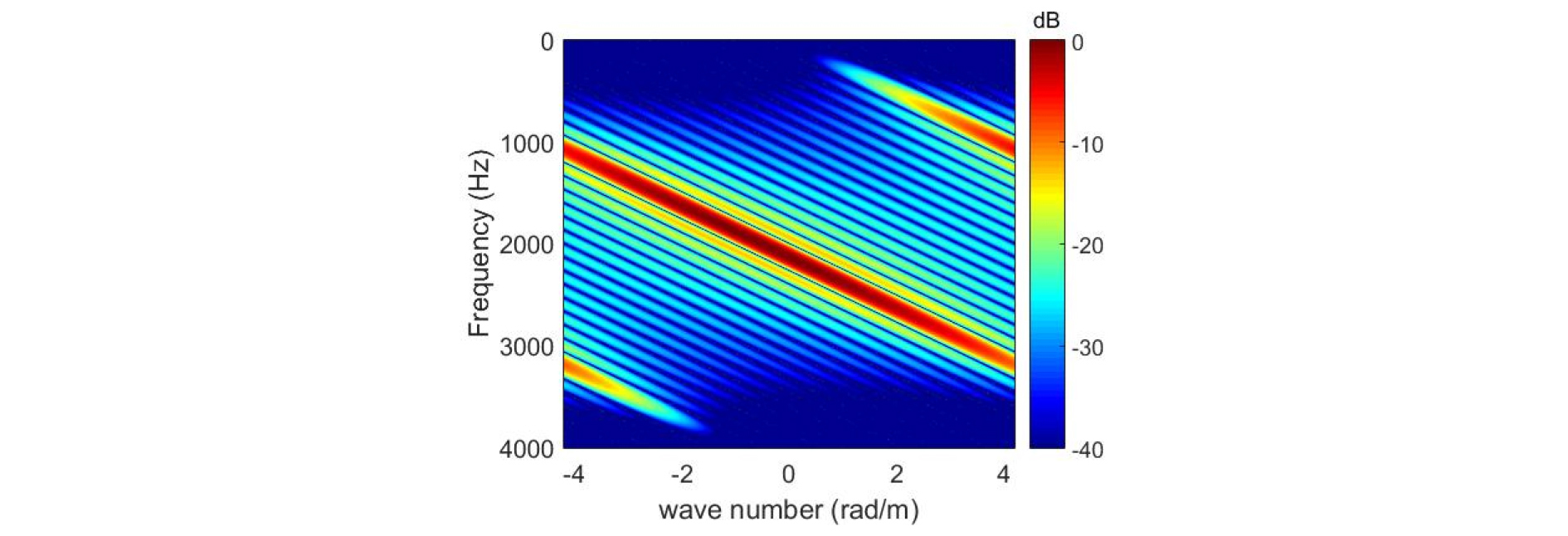
Fig. 4에서 LFM신호의 경우 주파수-파수 스펙트럼에서 일정한 기울기를 유지하는 것을 확인할 수 있다. 또한 설계주파수(1 kHz)보다 높은 주파수 대역(10 Hz ~ 4 kHz)을 갖는 신호이기 때문에 공간 에일리어싱이 일어나고 이로 인해 스펙트럼 상에서 줄무늬가 파수 축에서 전이되는 현상을 확인할 수 있다. 공간 에일리어싱이란 배열센서의 설계주파수보다 높은 주파수의 신호가 수신되었을 때 일어나는 현상이며, 위 그림 Fig. 4의 상황에서 2 kHz의 주파수에 대한 배열센서의 빔패턴을 도식화하면 Fig. 5와 같다.
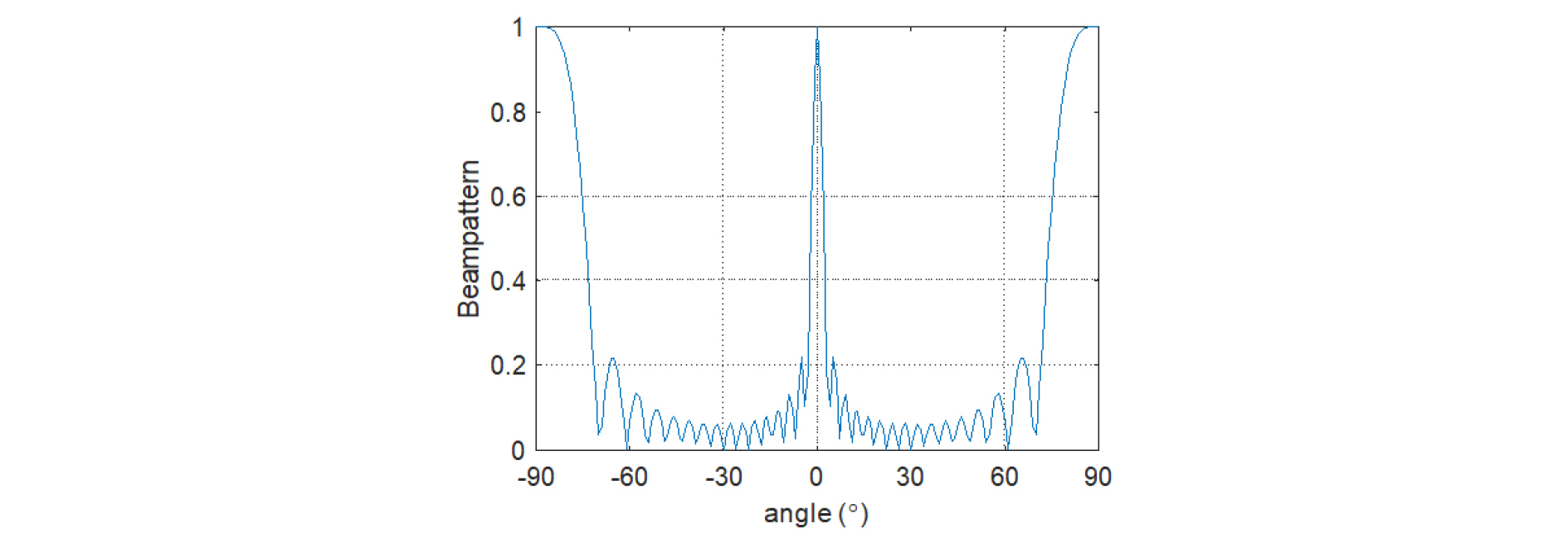
Fig. 5에서 0°에서 주대엽(main lobe)이 형성되지만 ± 90°에서 grating lobe가 발생하여 배열센서가 신호를 감지하는데 있어 모호성이 발생한다. 하지만 Fig. 4와 같이 주파수-파수 스펙트럼에서 줄무늬의 기울기는 일정하게 유지되고 있으므로 수신신호의 방향은 추정할 수 있다. 본 논문에서는 이러한 현상을 이용하여 설계주파수보다 높은 주파수 대역을 가진 신호의 방향을 추정하는 기법을 제안하였다. 다만, 본 논문에서 제시하는 방법은 광대역 신호에 적용이 가능하다는 제약조건이 있다. 협대역 신호의 경우 주파수-파수 스펙트럼 상에서 줄무늬의 기울기를 계산하기 어렵기 때문에 방위를 추정하기가 쉽지 않다.
다음 3장에서는 주파수-파수 스펙트럼에서 방향을 추정하는 라돈변환에 대한 내용을 기술한다.
III. 라돈변환
라돈변환은 이미지 데이터를 각 각도별로 회전하며 투영 데이터를 얻는 방법이다.[10-12] 본 논문에서는 주파수-파수 스펙트럼에서 신호의 방향을 추정하기위해 라돈변환을 사용하였다.
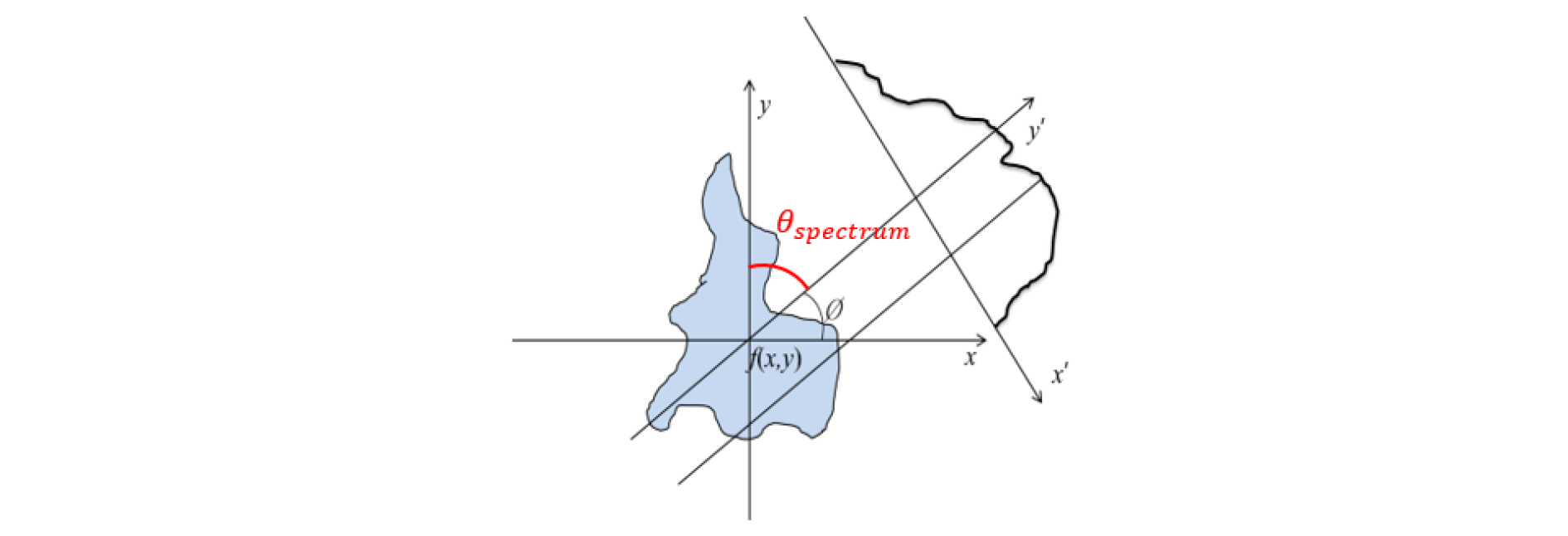
라돈변환은 Fig. 6과 같이 새로운 x축 x'에 투영하여 y'과 평행한 선을 따라 적분한다.[14,15] Eq. (1)에 라돈변환을 적용하면 Eq. (2)와 같으며, 는 라돈축으로 설정한 주파수, 은 라돈축으로 설정한 에서의 이다. 적분할 주파수 대역은 , 이고, 은 조향 각도 에 대응되는 주파수-파수 스펙트럼 상의 각도를 의미한다. 단, Eq. (2)에서 를 만족하는 경우에 한해 적분을 수행한다. 이는 의 최대값을 넘어가는 경우 스펙트럼의 값이 존재하지 않기 때문이다. 본 논문에서는 주파수-파수 스펙트럼의 결과를 이용하여 라돈변환을 수행하기 때문에 Fig. 6에서 , 축은 Figs. 2와 4의 주파수-파수 스펙트럼에서 파수, 주파수 축을 의미한다.
주파수-파수 스펙트럼에서 줄무늬가 기울어진 각도는 신호가 수신되는 방향이 아니라 기울어진 기울기에 해당하는 방향을 역산해야 신호가 수신되는 방향을 추정할 수 있다. 따라서 본 논문에서는 설계주파수를 이용하여 조향할 방향을 주파수-파수 스펙트럼상의 기울어진 각도로 변환하여 그 기울기에 해당하는 에너지를 적분하였다. Fig. 7은 주파수-파수 스펙트럼에 라돈변환을 적용하는 방법을 보이기 위한 그림이며, 그림에서 이다. 여기서 는 파수, 는 조향각, f는 주파수, c는 음속을 의미한다. 위 수식에 설계주파수()를 대입하여 설계주파수에 해당하는 와 설계주파수를 통해 주파수-파수 스펙트럼상의 기울기()를 Eq. (3)과 같이 계산할 수 있다.
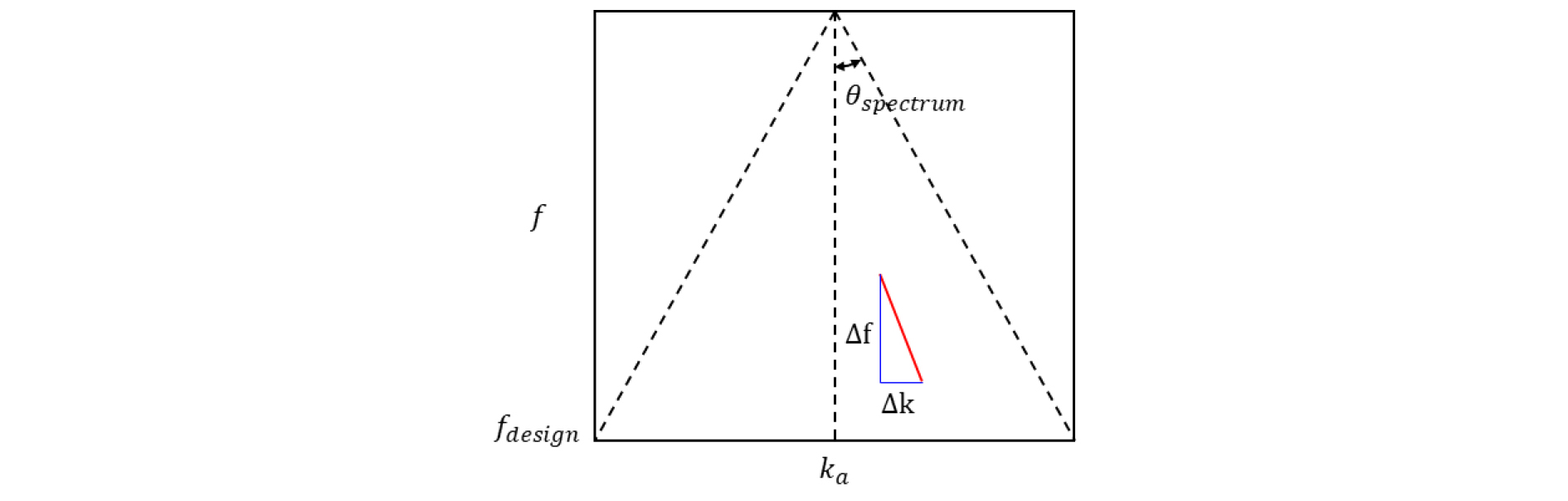
| $$\theta_{spectrum}=\mathrm{ar}c\tan\left(\frac{f_{de\mathrm{si}gn}}{k_\alpha}\right)=\arctan\left(\frac{f_{de\mathrm{si}gn}}{k\sin\theta}\right).$$ | (3) |
Eq. (3)을 이용하여 조향할 각도를 주파수-파수 스펙트럼 상에서의 기울기로 변환하여 라돈변환을 수행하였다.
2.1절의 Fig. 3의 신호를 서로 다른 방향(-90°, 10°, 70°)에서 수신하여 Fig. 4와 동일한 방법으로 주파수-파수 스펙트럼을 도식화하면 Fig. 8과 같다.
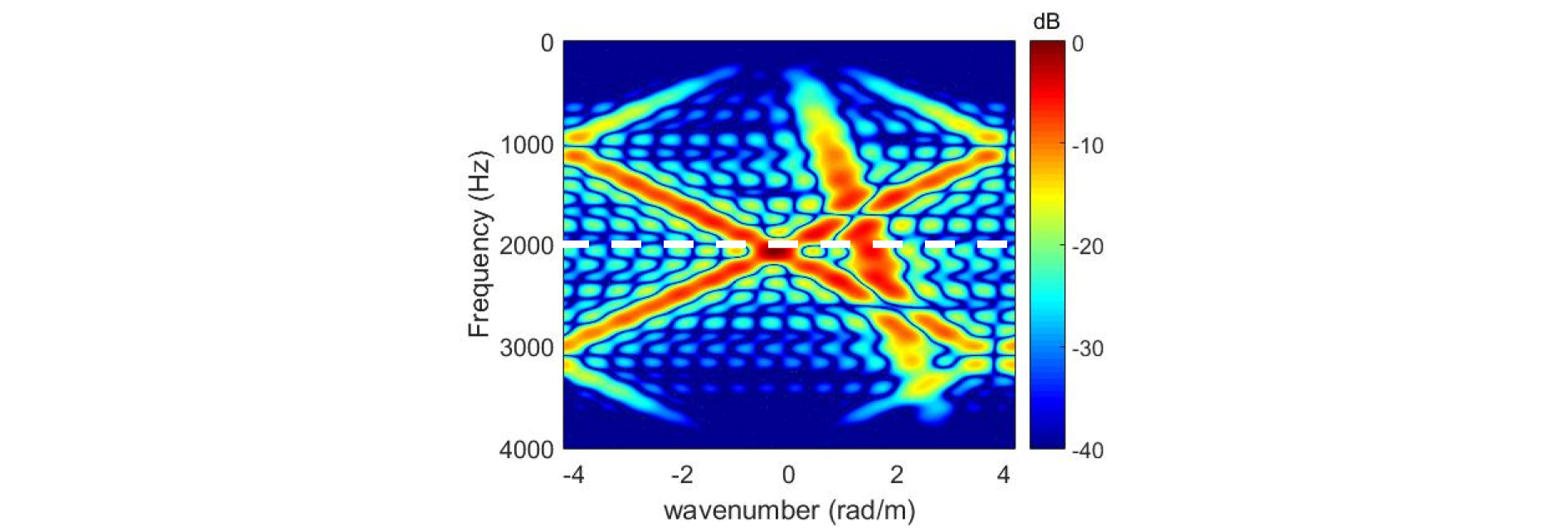
Fig. 8에 라돈변환을 적용하기 전에 라돈축을 설정해야하는데, 본 논문에서는 2 kHz로 설정하였다. 라돈축을 2 kHz로 설정하고 흰색 점선위의 각 지점에서 여러 각도에 따라 순차적으로 라돈변환을 수행하여 시각화하게 되면 Fig. 9와 같다. Fig. 8을 -90°부터 90°까지 1°씩 180회를 회전하며 에너지를 적분하고 적분된 에너지를 통해 신호가 수신된 방향을 추정하였다. Fig. 9의 색깔은 Fig. 8에서의 회전된 중심축을 기준으로 에너지를 적분한 값을 dB로 변환한 것이다. 또한 주파수 대역은 1.9 kHz부터 2.1 kHz의 200 Hz대역만을 사용하였다. 본 논문에서 제안된 기법은 줄무늬의 기울기를 이용하여 각도를 추정하기 때문에 주파수-파수 스펙트럼에서 줄무늬가 파수축에서 전이되면 각도를 추정하는 알고리즘을 적용하기 어렵다. 따라서 신호가 광대역이라 하더라도 줄무늬가 전이되지 않는 주파수 대역 내에서만 적용가능하다. 라돈변환의 특성상 라돈축으로부터 특정 기울기를 통해 적분하기 때문에 파수축에서 striation이 전이되어 버리면 더 이상 그 기울기방향으로 적분할 에너지가 존재하지 않기 때문에 전이되지 않는 범위 내에서 적용해야 한다. Fig. 8의 경우 1 kHz부터 3 kHz까지의 2 kHz대역까지 적용가능하고, Fig. 9의 경우 1.9 kHz부터 2.1 kHz까지의 200 Hz대역만을 이용한 결과이다.
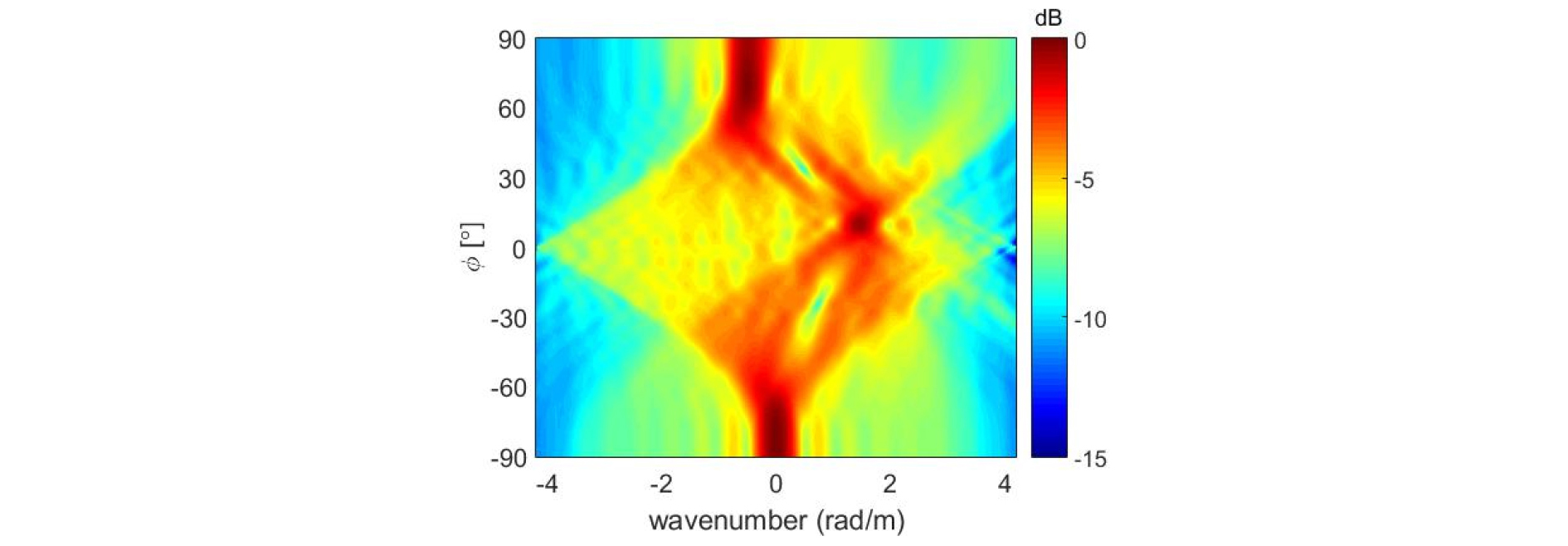
Fig. 9의 결과는 Fig. 8의 하얀색 점선을 따라 라돈변환을 수행한 것이고, Fig. 8에서 2개의 줄무늬와 하얀색 점선이 파수가 0인 지점에서 교차하고, 파수가 약 2인 지점에서 또 하나의 줄무늬와 교차한다. 교차하는 지점에서 라돈변환을 -90°에서 90°까지 에너지를 축적하면 Fig. 9에서 파수가 0인 지점에 2개의 각도(-90°, 70°)가 나타나고, 파수가 약 2인 지점에 10°의 방향이 나타난다.
이러한 시뮬레이션을 통해 다양한 각도에서 주파수 대역을 가진 신호를 수신했을 경우, 설계주파수보다 높은 주파수의 신호일지라도 방위 추정이 가능함을 알 수 있다.
IV. 해상실험 데이터를 이용한 검증
II‧III장의 알고리즘을 토대로 2015년 제주도 남서해역에서 수행된 SAVEX15(Shallow Water Acoustic Variability EXperiment 2015)의 데이터를 활용하여 검증하였다. 사용한 데이터는 수직 선배열센서에 수신된 딱총새우 신호를 이용하였고, 수신된 신호 및 스펙트로그램은 Figs. 10과 11과 같다. 딱총새우의 경우 직접경로와 해수면을 맞고 반사되어 들어온 경로의 두 가지 경로로 수신되며, 본 논문에서는 직접경로에 의한 신호만을 사용하였다. SAVEX15데이터에서 딱총새우 신호는 Fig. 10에서처럼 직접경로와 해수면 경로가 육안으로 구분이 되고, 신호의 길이(pulse length)가 짧아 직접경로와 해수면 경로를 따로 잘라서 데이터 분석이 가능하다.
본 논문에서는 Fig. 10의 직접경로에 의한 신호를 0 s부터 0.04 s까지 잘라 분석을 수행하였으며, Fig. 11은 Fig. 10에서 직접경로의 신호 중 16번째 채널에 수신된 신호의 스펙트로그램이고, 윈도우 사이즈는 0.002 s, 스냅샷은 0.001 s 간격이다. 딱총새우의 대역폭이 약 4 kHz에서 24 kHz인 것을 알 수 있다. 실험에 사용된 VLA의 설계주파수가 200 Hz이기 때문에 딱총새우 신호는 공간 에일리어싱이 발생한다. 하지만 제안된 알고리즘은 공간 에일리어싱이 발생하더라도 줄무늬의 기울기를 계산할 수 있다면 표적의 방위를 추정할 수 있다. 딱총새우의 신호 길이가 0.04 s이고, 이를 이용하여 주파수-파수 스펙트럼을 도식화하면 Fig. 12와 같다. SAVEX15 데이터의 샘플링 주파수는 100 kHz이고, 선배열센서의 센서간 거리는 3.75 m, 분석에 사용한 주파수 대역은 19.9 kHz에서 20.1 kHz이다.
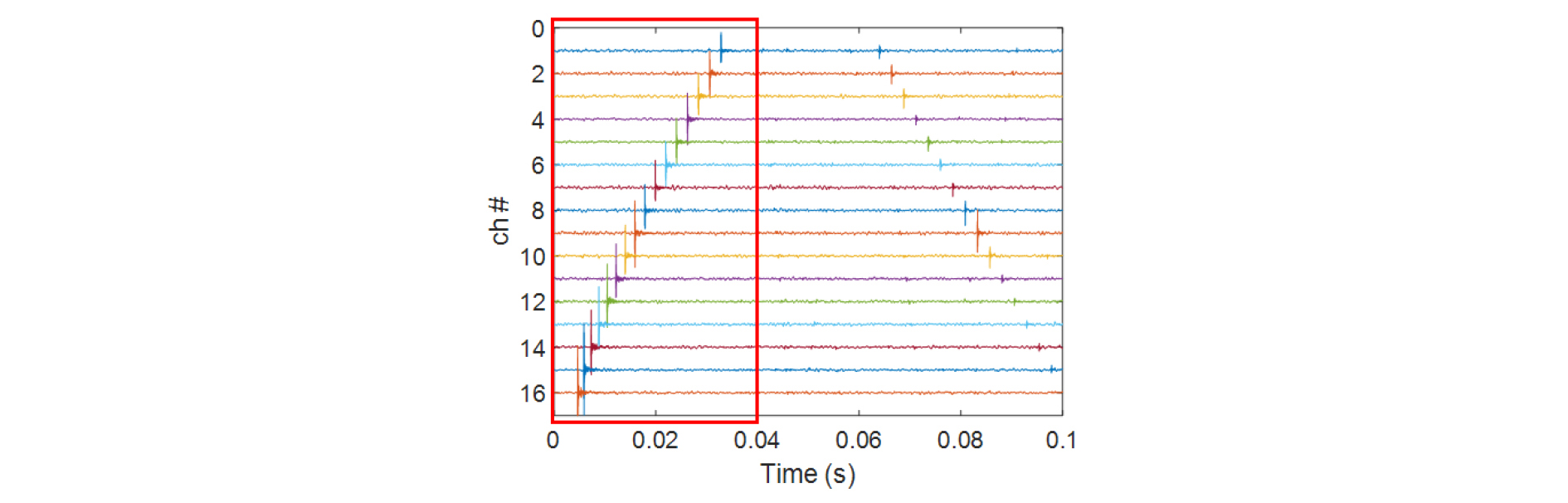
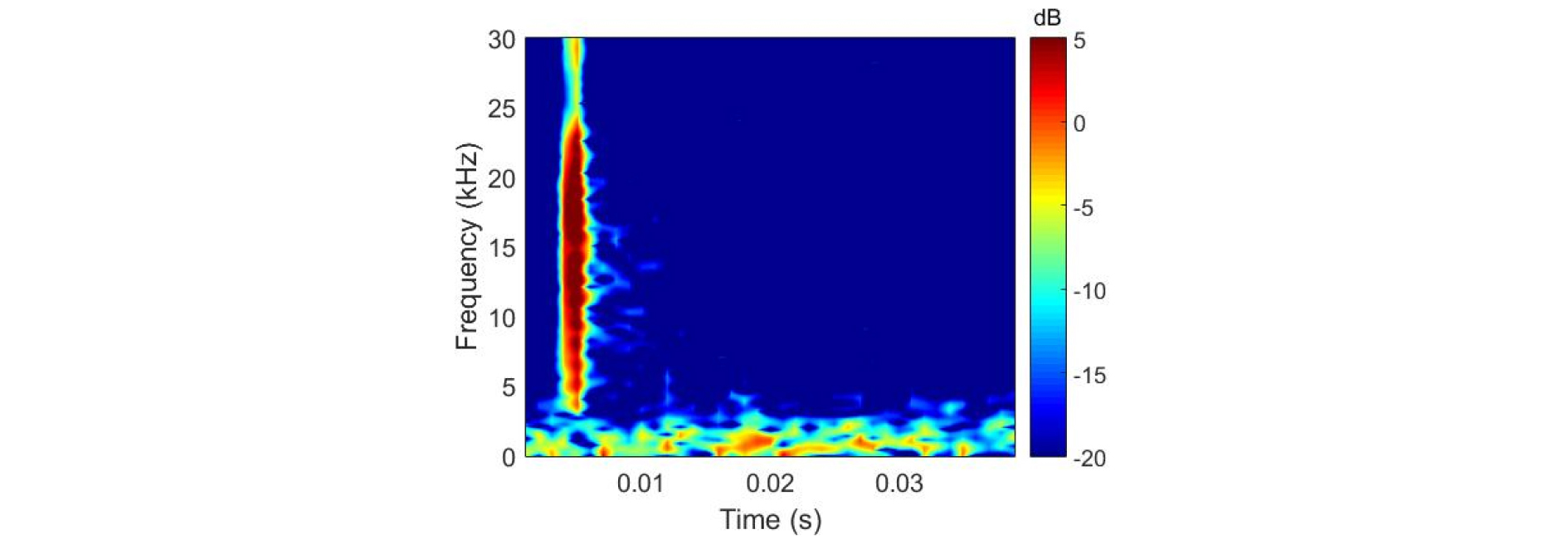
Fig. 12의 주파수-파수 스펙트럼을 라돈변환하게되면 Fig. 13의 결과가 도출되며, 이때, 라돈축은 20 kHz를 사용하였다.
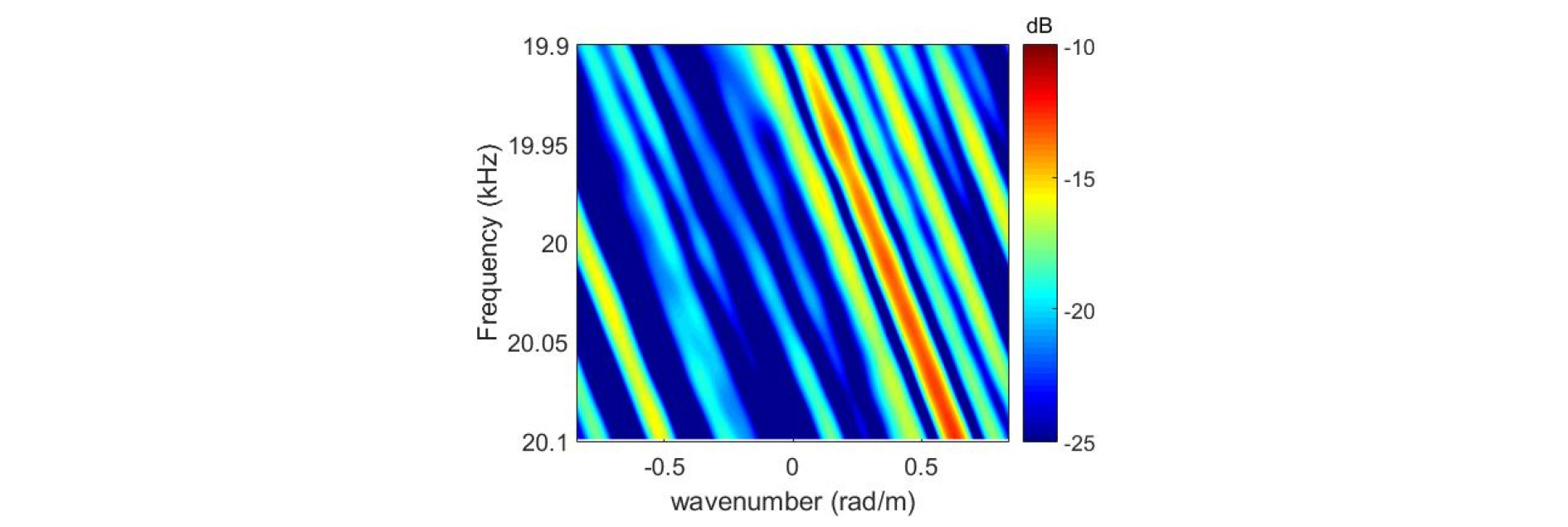
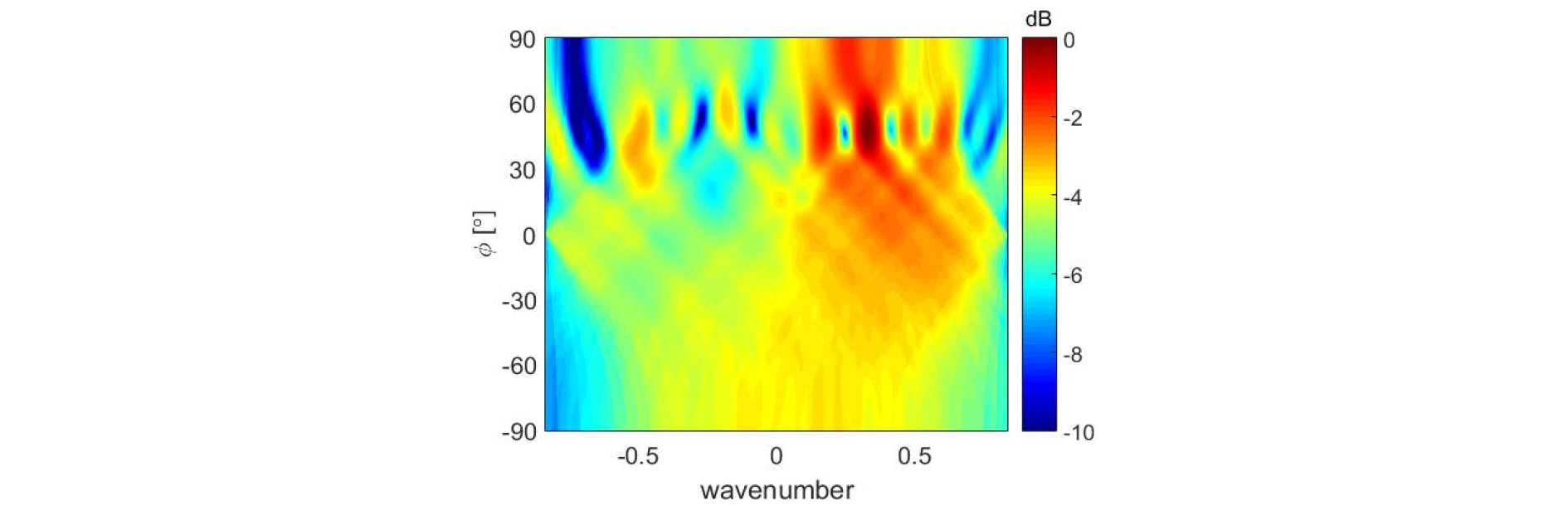
Fig. 12에서 라돈축인 20 kHz와 줄무늬가 교차하는 부분이 파수가 약 0.4인 부분인데, Fig. 13에서 파수가 약 0.4인 부분을 보면 신호가 수신된 방향에 가장 많은 에너지가 중첩된 것을 확인할 수 있다. 이를 통해 딱총새우 신호의 방향이 약 47°임을 알 수 있다.
검증을 위해 앞서 이용한 신호를 -90°에서 90°까지 1°간격으로 본 논문에서 제시한 기법과 다른 두 가지의 빔형성을 수행하였고, 빔형성에 사용한 주파수 대역은 19.9 kHz부터 20.1 kHz까지 사용하였다. 두 가지의 빔형성 기법은 CBF(Conventional BeamForming)과 2012년 Abadi가 제안한 차주파수 빔형성 기법(FDBF, Frequency-Difference BeamForming)이다. 본 논문에서 이용한 CBF기법은 주파수 대역에서 비상관 합을 통해 결과를 도출하는 incoherent CBF기법을 이용하였다.[16] FDBF는 신호가 광대역 신호일 때, 적용 가능한 빔포밍 기법으로 신호의 주파수 대역내의 주파수 성분을 두 개 선택하여 선택된 주파수 성분의 차를 이용하여 신호의 방향을 추정하는 빔형성 기법이다. 그리고 FDBF은 선배열센서의 설계주파수보다 높은 주파수 성분을 가지는 신호가 수신되었을 경우 방위를 추정할 수 있는 기법으로 알려져 있다. FDBF은 Eq. (4)를 이용하여 구현할 수 있으며, Eq. (4)의 , 가 모두 신호의 주파수 성분이어야 한다.[2] 이때, 는 각주파수를 의미하며 와 같다.
Eq. (4)에서 b는 빔형성 결과이며, 는 수신된 신호의 스펙트럼에서 주파수 성분이고, j는 센서 번호를 의미한다. 는 시지연 정보이며, 조향각 와 배열센서의 좌표벡터의 함수이다. Eq. (4)에서 이 차주파수 값을 의미하며, Figs. 14와 15의 결과에서는 차주파수 성분을 200 Hz로 설정하였다. CBF와 FDBF을 19.9 kHz부터 20.1 kHz까지 각 주파수별로 수행하면 Fig. 14와 같다.
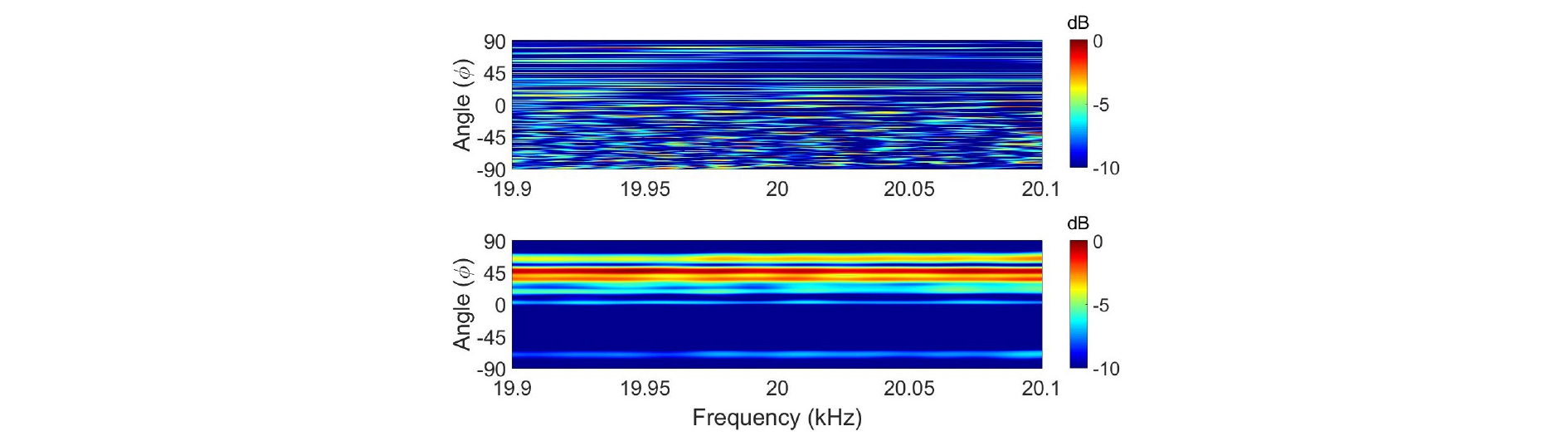
Fig. 14의 결과를 주파수 영역에서 incoherent sum을 수행하여 본 논문에서 제시한 빔형성 기법의 결과와 비교하여 도식화하면 Fig. 15와 같다. CBF와 FDBF의 경우 주파수 대역을 많이 사용할수록 방위추정의 정확도가 올라가는 장점이 있지만 본 논문에서는 3가지 알고리즘의 결과를 비교하기 위해 동일한 주파수 대역(200 Hz)을 사용하였다.
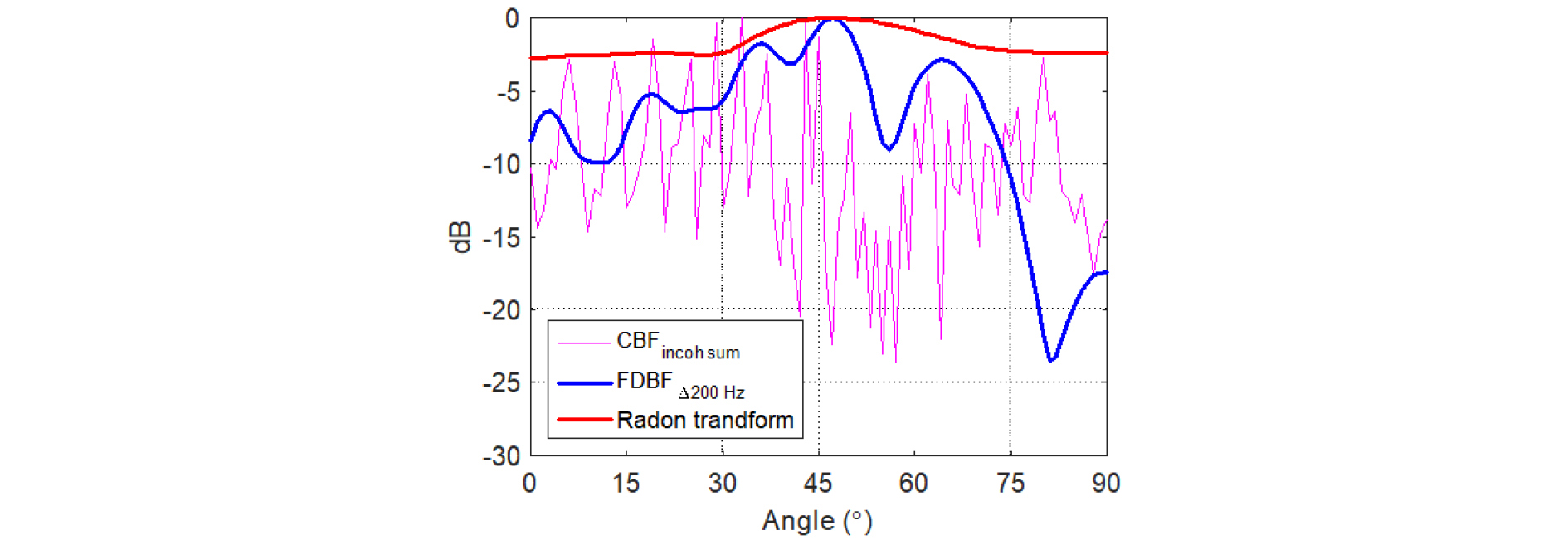
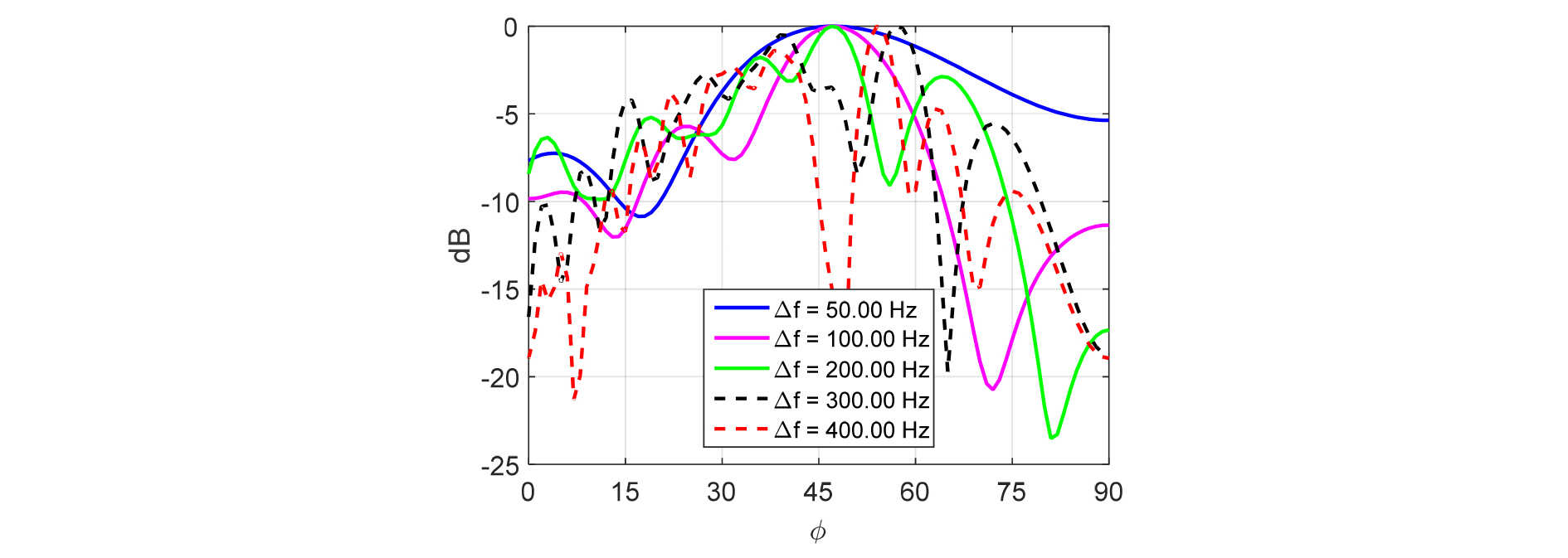
Fig. 15에서 보다시피 CBF는 신호의 방향을 추정할 수 없지만 FDBF과 제안된 빔형성 기법은 표적의 방향을 추정할 수 있다. 하지만 FDBF는 차주파수의 값에 따라 변화하는 모호성이 존재한다. Fig. 15의 FDBF결과는 차주파수가 200 Hz에 대한 결과이고, 차주파수를 변화시키면서 표적의 방위를 추정했을 때, Fig. 16과 같이 차주파수에 따라 결과가 달라진다.
하지만 제안된 기법은 라돈축을 이동해도 동일하게 표적신호의 방위를 추정한다. 또한 라돈축을 신호의 주파수대역 내에서 이동하며 결과를 평균 취했지만 뚜렷한 변화가 없었다. 따라서 공간분해능을 높이기 위해서는 주파수 성분을 변화시키며 평균을 취하기보다는 줄무늬의 굵기에 관한 연구를 추가적으로 진행하여 공간분해능을 개선할 필요가 있다. Fig. 15를 통해 제안된 기법은 FDBF보다 공간분해능이 떨어지지만 모호성이 없다는 장점이 있다.
V. 결 론
본 논문에서는 설계주파수가 낮은 배열센서를 이용하여 상대적으로 높은 주파수 대역을 갖는 신호의 방향을 추정하는 연구를 수행하였다. 본 논문에서 제안하는 기법과 2012년 Abadi가 제안한 차주파수 빔형성 기법을 비교분석하였다. 그 결과 공간분해능은 차주파수 빔형성 기법이 제안된 기법보다 우수한 성능을 보였다. 하지만 차주파수의 값이 다를 때, 차주파수 빔형성 기법은 빔형성 결과가 달라지므로 방위 추정에 모호성이 존재하는 단점을 가진다. 제안된 기법은 주파수 대역을 다르게 설정하여도 방위 추정에 모호성이 존재하지 않고, 차주파수 빔형성 기법과 동일하게 광대역 신호에 적용 가능한 제약조건을 갖는다. 본 연구를 통해 배열센서의 설계주파수보다 높은 주파수 대역을 갖는 신호의 방위를 추정할 수 있는 기법을 제안하고, 해상데이터를 통해 검증하였다.
