

I. 서 론
LOFAR(LOw Frequency Analysis and Recording) 그램은 수동 소나에서 사용되는 시각화 기법으로 표적 탐지 및 표적 주파수 분석을 수행하는 목적으로 사용된다. LOFAR는 빔형성 후에 빔 신호를 주파수 영역으로 변환하고, 시간에 대한 적분, 주파수 영역에서의 규준화 등의 과정을 통해 생성되며, 시간, 주파수 별 신호의 크기를 전시하는 형태로 운용자 화면에 표현된다.[1]
최근에는 수동 소나의 탐지 성능을 높이기 위해 다양한 소나 시스템을 복합 운용하거나, 새로운 신호처리 기법들을 도입하고 있다.[2,3] 이러한 형태로 소나를 운용하는 것은 표적의 탐지율을 높일 수 있는 장점이 있는 반면, 운용자에게 많은 처리 결과를 동시에 다루게 하는 부담을 끼치는 단점도 있다. 예를 들어, 수동 소나 종류가 많아지면 소나 시스템 별로 처리한 LOFAR 그램 개수도 많아진다. 또는 하나의 소나 시스템에 서로 다른 신호처리 기법을 적용하여 처리하게 되는 경우도 마찬가지이다.
만약 동일 주파수 대역에 대해 서로 다른 종류의 LOFAR 그램이 생성될 경우에는 LOFAR 그램 융합을 통해 표적의 정보를 하나의 화면에 표현하는 것이 가능하다.[4] LOFAR 그램 융합이 필요한 대표적인 경우는 다음과 같다. 첫 번째는 서로 다른 소나 시스템의 운용 주파수 대역이 겹치는 경우이다. 예를 들어 HMS(Hull Mounted Sonar)와 TAS(Towed Array Sonar)를 통해 획득한 음향 신호들은 각각 센서 배열의 구조가 다르기 때문에 독립적으로 빔형성 등의 신호처리 기법을 적용한다. HMS에서 탐지된 수동 소나 표적이 항상 TAS에서 탐지되지 않기 때문에 중복되는 주파수 영역에 대해서도 LOFAR 그램을 각각 생성해야 한다. 두 번째는 동일 소나 시스템의 신호에 대해 두 개 이상의 LOFAR 그램을 생성하는 경우이다. 예를 들어 지연합 빔형성과 적응 빔형성을 동시에 적용하게 되면 두 개의 LOFAR 그램을 생성할 수 있다. 적응 빔형성은 기존 빔형성에 비해 간섭신호를 줄일 수 있는 장점이 있는 반면, 원거리장(Far field) 조건이 만족되지 않는 표적에 대해서는 성능이 현저히 저하될 수 있는 단점이 있다. 운용자는 서로 다른 처리기법을 통해 생성된 LOFAR 그램들 중 어느 것으로 부터 표적을 탐지하는 것이 효과적인지 알 수 없기 때문에 각각의 LOFAR 그램을 모두 확인해야 하는 부담이 발생한다.
Ahn et al.[4]은 위와 같은 경우 LOFAR그램을 효과적으로 융합하는 방법을 제안하였다. 이 방법은 1차원 가우시안 커널 기반의 양방향 필터를 서로 다른 주파수 스펙트럼에 적용한 후 완만화된 정도를 주파수 빈 별로 비교하여 적게 완만화 된 주파수 빈의 스펙트럼 값을 취하는 방식으로 융합을 수행하였다. 일반적으로 양방향 필터는 이미지의 경계를 보존하고 잡음을 완만화 시키는 특징이 있기 때문에, 경계에 해당하는 토널 신호는 완만화 되지 않고 보존될 수 있기 때문이다.[5-7] 그러나 LOFAR 그램에서 토널 신호는 시간-주파수 영역에서 연속적으로 나타나는 2차원적 특징을 가지고 있기 때문에 주파수 스펙트럼의 정보만을 이용하는 이 방법은 제한적인 융합 성능을 가질 수밖에 없다.
제안하는 방법은 전처리된 2차원 LOFAR그램의 시간-주파수 좌표 마다 국부 비등방성을 계산 및 비교하여 비등방성이 큰 좌표의 그램을 취하는 방식으로 융합을 수행한다. LOFAR그램의 2차원 정보를 이용할 수 있으므로 기존 방법에 비해 토널 신호의 융합에 유리하다. 전처리 과정에서는 영상처리 분야에서 잘 알려진 방향성 양방향필터링을 수행한다. 단, 잡음을 효과적으로 억제시켜 토널이 강조될 수 있는 커널을 추가적으로 제안하였다.
본 논문은 다음과 같이 구성되어 있다. 먼저 2장에서는 기존의 LOFAR 그램 융합 방법을 설명하고 특성을 분석한다. 그리고 LOFAR 그램의 2차원 정보를 활용하기 위한 방법으로 국부 비등방성을 이용한 LOFAR 그램 융합 방법을 제시하며, 알고리즘에 필요한 전처리 과정에 대해 설명한다. 3장에서는 모의 데이터와 해상 데이터를 이용해 제안한 방법의 융합 성능을 분석한다. 마지막으로 4장에서 결론을 맺는다.
II. LOFAR그램 융합 방법
2.1 기존 방법
기존의 LOFAR그램 융합 기법은 양방향 필터를 이용하여 원본 그램을 필터링 한 후, 원본 그램과 필터링된 그램의 비교를 통해 최종 융합 그램을 만드는 방법이다.[4] 기존 방법의 이해를 돕고 제안하는 방법의 원활한 설명을 위해 일반적인 양방향 필터를 먼저 소개 한다. 일반적인 양방향 필터는 다음과 같이 나타낸다.
| $$\widehat I(\mathbf p)=W^{-1}\sum_{\mathbf q\in Q}\phi\left\{I(\mathbf p),\;I(\mathbf q)\right\}I(\mathbf p),$$ | (1) |
일반적으로 이미지 처리 분야에서 p는 픽셀을 I(p)는 원본 이미지의 인텐시티, 는 필터링 된 이미지의 인텐시티를 나타낸다. 이를 양자화(quantiza- tion)되기 전의 LOFAR그램에 적용하면 는 원본 그램의 진폭, 는 필터링 된 그램의 진폭을 나타낸다고 볼 수 있다. p는 필터링을 수행하고자 하는 그램의 좌표, 즉 시간 샘플과 주파수 빈(bin)으로 이루어진 2차원 좌표를 의미하며 각각을 로 나타낼 수 있다. q는 p를 포함한 국부 윈도우 Q 안에 위치하는 좌표들을 의미하며 로 나타낼 수 있다. 는 를 필터링 하기 위해 사용되는 가중치 함수, 즉 커널을 의미한다. 커널은 그 종류에 따라 이미지를 국소적으로 평활화 하는 형태와 범위가 결정된다. W는 정규화를 위한 커널의 합으로 다음과 같이 정의한다.
| $$W=\sum_{\mathbf q\in Q}\phi\left\{I(\mathbf p),\;I(\mathbf q)\right\}.$$ | (2) |
기존 방법은 주파수 스펙트럼에 양방향 필터링을 수행하기 위해 Eq. (1)에 주파수 도메인에 대한 1차원 커널을 이용하였다. 이를 위해 p와 q는 1차원 변수 p와 q로 대체된다. p는 주파수 빈이며 Q는 q의 상한과 하한 사이에 있는 p와 p의 인접 주파수 빈들로 구성된 집합이 된다. 기존의 LOFAR 그램 융합방법에서 사용된 1차원 커널은 다음과 같이 표현된다.
| $$\phi^{1D}\left\{I(p),I(q)\right\}=exp\left(-\frac{\left|p-q\right|^2}{2\delta_d^2}\right)\exp\left(\frac{\left|I(p)-I(q)\right|^2}{2\mathrm\delta_r^2}\right).$$ | (3) |
일반적으로 이미지 처리 분야에서는 Eq. (3)의 첫째 항을 공간 도메인 커널(domain kernel), 둘째 항을 레인지 커널(range kernel)이라 한다. 여기서 는 도메인 커널에 대한 분산, 는 레인지 커널에 대한 분산으로 필터링 결과에 직접적인 영향을 미치는 인자이다.
Eq. (1)에 의해 양방향 필터링 된 LOFAR 그램에서 토널은 대체적으로 본래 값을 유지하고, 잡음은 커널에 의한 평균 값으로 치환된다. 기존 기법은 이러한 특성을 기반으로 선예도(sharpness)를 정의하고, 선예도가 큰 값은 융합에 사용하고 그렇지 않은 값은 융합에서 제외하는 방식으로 융합을 수행한다. 이를 수식으로 표현하면 다음과 같다.
| $$I_{syn}(p)=\left\{\begin{array}{l}I_A(p)\;\;\;where\;S_A(p)\geqq S_B(p)\\I_B(p)\;\;\;where\;S_A(p)<S_B(p),\end{array}\right.$$ | (4) |
여기서 S(p)는 선예도를 나타내며 아래첨자 A와 B는 융합하고자 하는 두 이미지를 구분하기 위해 사용 하였다. 선예도는 아래와 같이 정의한다.
| $$S(p)=\frac1{\left|I(p)-\widehat I(p)\right|+\varepsilon},$$ | (5) |
여기서 𝜀는 Eq. (5)에서 분모가 0이 되는 것을 방지하기 위한 작은 상수이다. Eq. (5)에 의하면 선예도는 I(p)와 의 차이가 적을수록, 즉 필터링 된 그램의 진폭이 원본 그램의 진폭 값을 유지하는 그램의 p에서는 선예도가 크다.
LOFAR 그램 융합은 크게 두 가지 사항을 고려해야 한다. 먼저 토널 성분이 누락 없이 융합되어야 하며, 원본 그램에 비해 융합 그램의 잡음레벨이 증가해서는 안된다. 대체적으로 LOFAR 그램에서 토널은 잡음에 비해 큰 값을 갖게 되므로 선예도는 토널의 융합에 유용하다. 또한, 잡음간의 비교에서는 잡음레벨이 낮고 주파수에 따른 변화가 완만한 구간이 그렇지 않은 구간에 비해 선예도가 크므로 선예도는 그램의 융합 시 잡음레벨이 커지는 현상을 방지한다고 볼 수 있다.[2]
그러나 바로 이러한 특성 때문에 기존 융합 기법은 경우에 따라 토널이 융합에 실패할 가능성이 존재한다. 첫째로 SNR(Signal to Noise Ratio)이 낮은 토널은 상대적으로 큰 레벨을 갖는 잡음에 비해 선예도가 낮아 융합에 실패할 수 있다. 둘째로 토널의 SNR이 비교적 높더라도 상대 LOFAR의 잡음레벨이 매우 낮고 평탄해 선예도가 더 큰 경우 토널이 융합에 누락될 수 있다. 이는 1차원 커널 기반의 양방향 필터를 사용하는 기존 필터링 방법이 토널에 대해 제공하는 정보가 제한적이기 때문이며, 동시에 선예도라는 융합 기준 자체의 한계이기도 하다.
2.2 제안하는 방법
LOFAR 그램은 시간-주파수의 2차원 정보를 제공하며, 일반적으로 관심 토널의 시간 지속성을 관찰 하여 표적을 탐지한다. 기존 기법은 양방향 필터링 수행 시 1차원 커널을 이용하였으므로, LOFAR 그램의 2차원적 특성을 충분히 반영하지 못했다고 볼 수 있다. 본 논문에서는 LOFAR 그램의 시간-주파수 영역에서 구간별 비등방성(anisotropy)을 측정하여 이를 융합에 활용하는 방법을 제안한다. 이때 양방향 필터는 전처리 과정으로 활용한다. 이번 절 에서는 먼저 비등방성도의 정의와 이를 이용한 융합 방법에 대해 설명하고, 이어서 전처리 과정에 대해 설명한다.
2.2.1 융합방법
2.2.1.1 방법 A: 비등방성도의 직접적인 이용
비등방성도(anisotropy measure)는 이미지의 비등방성을 측정하는 파라미터로 LOFAR 그램의 토널과 같은 특정 패턴의 방향을 정량적으로 표현한 값이다. 비등방성도는 구조텐서(structure tensor)를 기반으로 얻어진다. 구조텐서는 이미지 신호처리 분야에서 이미지의 경계검출을 위해 주로 사용되는 개념으로 경사도(gradient)에 대한 공분산 행렬을 의미하며 다음과 같이 정의 한다.[8]
여기서 와 는 각각 시간(t)과 주파수(f) 방향에 대한 LOFAR 그램의 경사도이며 다음과 같이 구할 수 있다.
여기서 와 는 전처리된 LOFAR 그램, 즉 으로 부터 구한다. Eq. (6)에서 J는 대칭행렬(symmetric matrix)이며 준정부호행렬(positive semi- definite matrix)이다. 비등방성도 𝛼 는 J의 고유값을 이용해 계산되며 다음과 같이 정의 한다.[9]
| $$\alpha=\left(\frac{\lambda_1-\lambda_2}{\lambda_1+\lambda_2}\right),$$ | (8) |
여기서 과 는 J의 고유값이며 다음과 같이 구할 수 있다.[9]
| $$\lambda_{1,2}=\frac12\left(J_{22}+J_{11}\pm\sqrt{(J_{22}-J_{11})^2+4J_{12}^2}\right).$$ | (9) |
Eq. (8)에서 𝛼는 윈도우 Q 안에서 진폭의 분포 특성을 나타낸다. LOFAR그램에서 토널신호의 경우 윈도우 안에서 상하로 이어지는 방향을 따라 상대적으로 큰 진폭이 연속적으로 분포되는 특성을 갖는다. 이때 J의 두 고유값은 큰 차이를 가지며 따라서 𝛼는 1에 가까운 값을 갖는다. 반면, 잡음은 일반적으로 진폭 레벨이 무작위로 분포되며 이 경우 𝛼는 0에 가까운 값을 갖는다. 따라서 𝛼가 1에 가까운 값일수록 토널일 확률이 높다고 할 수 있다.
제안하는 첫 번째 방법 A는 𝛼를 융합에 직접적으로 활용하는 방법이다. Fig. 1은 방법 A의 블록도를 나타낸다. 먼저 융합하고자 하는 두 개의 LOFAR 그램 IA와 IB를 각각 전처리 수행하여 와 를 생성한다. 그런 다음 와 의 모든 시간-주파수 빈에 대해 𝛼를 산출하고 이를 기반으로 융합을 수행한다. 융합된 LOFAR 그램을 Isyn라 할 때 이를 위한 융합 기준은 다음과 같다.

| $$I_{syn}(p)=\left\{\begin{array}{l}I_A(\mathbf p)\;\;\;\;where\;\alpha_A(p)\geqq\alpha_B(p)\\I_B(\mathbf p)\;\;\;\;where\;\alpha_A(p)<\alpha_B(p)\end{array}.\right.$$ | (10) |
2.2.1.2 방법 B: 비등방성도의 간접적인 이용
제안하는 두 번째 방법은 𝛼를 기존 방법의 레인지 커널에서 분산 값을 가변시키는데 활용하는 방법이다. 융합 기준은 Eq. (5)의 선예도를 그대로 이용하기 때문에 방법 B는 𝛼를 융합에 간접적으로 이용하는 방법이라고 할 수 있다. Fig. 2는 방법 B의 블록도를 나타낸다. 방법 A와 마찬가지로 원본 그램에서 전처리된 그램을 생성하고 그로부터 𝛼를 산출한다. 그런 다음 𝛼를 기존 1차원 양방향 필터의 레인지 커널 분산값 조절에 사용한다. 마지막으로 1차원 양방향 필터 결과를 기반으로 선예도를 구하고 융합을 수행한다.

Eq. (3)으로부터 레인지 커널이 주파수에 따라 가변적으로 변하는 1차원 양방향 필터의 커널을 다음과 같이 정의한다.
| $$\phi^{ABF}\left\{I(p),I(q)\right\}=\exp\left(-\frac{\left|p\mathit-q\right|^2}{2\mathrm\sigma_d^2}\right)\exp\left(\frac{\left|I(p)-I(q)\right|^2}{2{\mathrm\sigma}_r(p)^2}\right),$$ | (11) |
여기서 𝜎r(p)는 주파수 빈(p)에 따라 변하는 값으로 다음과 같이 정의한다.
| $$\sigma_r(p)=\alpha(p)\sigma_\min+(1-\alpha(p))\sigma_\max,$$ | (12) |
여기서 𝜎min과 𝜎max는 각각 레인지 커널 표준편차의 최소, 최댓값으로 사용자에 의해 결정되는 값이다. 만일 토널 성분이 포함된 윈도우의 경우 𝛼가 1에 가까운 값을 갖게 되는데, 이는 𝜎r이 𝜎min에 가까운 값이 된다. 그러면 해당 주파수 빈의 토널성분은 완만화되지 않고 그 값이 유지된다. 반면 잡음의 경우 𝛼가 0에 가까워지며 이 경우 𝜎r은 𝜎max에 가까운 값이 되고 큰 폭으로 완만화된다. 이 방법은 융합 후 잡음레벨 증가 방지에 효과적인 기존 융합기준의 장점을 그대로 취하면서, 그램의 2차원 정보를 반영해 토널 누락 현상을 방지하는 방법으로 기존 기법을 보완한다고 볼 수 있다.
2.2.2 전처리방법
제안한 방법은 2차원 커널 기반의 방향성 양방향 필터를 이용해 원본 그램에 대해 전처리 한다. 이 과정은 잡음을 효과적으로 완만화 시켜 토널신호를 부각시키고 결과적으로 𝛼를 이용한 그램 융합 성능을 향상 시키는 역할을 한다. 2차원 양방향 필터는 이미지 처리 분야에서 널리 사용되는 기법이다.[5-7] 양방향 필터에 사용되는 커널은 그 종류에 따라 이미지를 국소적으로 평활화 하는 형태와 범위가 결정된다. 따라서 LOFAR 그램에 적용 시키기 위해서는 토널신호에 적합한 커널 선정이 필요하다. 본 논문에서는 도메인 커널, 레인지 커널 각각에 토널이 갖는 시간 지속성을 반영하는 방법을 제안하였다. 기존 기법의 커널에 대응되는 제안하는 방법의 커널은 다음과 같이 나타낼 수 있다.
Eq. (13)의 첫째항인 도메인 커널은 Eq. (3)의 1차원 도메인 커널을 2차원으로 확장 시킨 것으로써, 시간-주파수 영역에서의 방향성이 고려된 가우시안 함수로 정의 된다.[7] 따라서 시간지속성을 갖고 발생되는 협대역 토널 신호의 경우 토널이 존재하는 방향을 따라 좁고 긴 형태의 가우시안 커널이 생성되며, 방향성이 뚜렷하지 않은 잡음일수록 등방성의 커널이 생성된다. 따라서 Eq. (13)의 도메인 커널은 토널이토널 주변의 성분과 평활화 되는 것을 방지하는 동시에 잡음의 경우 주변 성분과 효과적으로 평활화 되도록 하는 특성을 갖는다. Eq. (13)에서 윈도우 Q는 주파수 축으로는 기존방법과 동일하게 주파수 상한과 하한을 가지며, 시간 축으로는 현재시간 샘플 k기준으로 과거 K샘플의 범위를 갖는다. Eq. (13)의 도메인 커널에서 m과 n은 다음과 같이 정의된다.
| $$\begin{array}{l}m=(m_q-m_p)\cos\theta+(n_q-n_p)\sin\theta\\n=-(m_q-m_p)\sin\theta+(n_q-n_p)\cos\theta,\end{array}$$ | (14) |
Eq. (13)의 𝛾1, 𝛾2 그리고 Eq. (14)의 는 커널의 크기와 방향을 조절하는 인자로 다음과 같이 정의된다.
| $$\gamma_2=\left(1-\alpha'\right),\;\gamma_1=1/\gamma_2.$$ | (15) |
| $$\theta=\frac\pi2+\tan^{-1}\left(\frac{2J_{12}'}{J_{22}'-J_{11}'}\right).$$ | (16) |
Eq. (16)에서 는 원본 LOFAR 그램의 윈도우에서 도출된 구조텐서의 고유벡터 방향으로 도메인 커널의 방향을 나타낸다. Eq. (16)의 , , 는 각각 원본 그램 구조텐서의 원소를 의미하며 Eq. (6)과 같은 방법으로 구한다. 은 원본 그램 윈도우에서의 비등방성도를 나타내며 Eq. (8)과 같은 방법으로 계산 된다.
Eq. (13)의 두 번째 항은 레인지 커널을 나타낸다. Venkatesh et al.[7]은 양방향 필터의 도메인 커널에 방향성을 고려하기 위해 Eq. (13)의 도메인 커널을 제안하였으나 레인지 커널은 일반적인 형태, 즉 Eq. (13)에서 𝜉(p)가 0인 형태를 사용하였다. 한편 Zhang과 Allebach는[5] 도메인 커널에 방향성을 고려하지 않은 일반적인 형태의 가우시안 커널을 사용한 반면 레인지 커널에서 Eq. (13)의 𝜉(p)와 같은 부가적인 항을 추가하여 양방향 필터의 성능을 개선한 바 있다. Zhang 과 Allebach이 제안한 여러 형태의 𝜉(p)조절 방법은 일반적인 이미지 필터링을 위한 방법으로 토널신호에 적합하지 않다. 본 논문에서는 도메인 커널에서 도출 된 방향성 정보를 이용하여 𝜉(p)를 토널 신호에 적합한 형태로 다음과 같이 변형하였다.
| $$\xi(\mathbf p)=\mu(\mathbf p)-I(\mathbf p),$$ | (17) |
여기서 𝜇(p)는 p 로부터 도메인 커널의 방향, 즉 Eq. (15)로 구한 방향에 위치한 그램의 가중 평균을 의미한다. Eq. (17)을 Eq. (13)에 대입하면 레인지 커널은 𝜇(p)를 기준으로 형성되는 가우시안 함수가 된다. 토널이 좌표 p에 위치할 경우 토널 방향을 따라 도메인 커널이 방향성을 가지며 𝜇(p)은 I(p)와 유사할 확률이 높다. 반면 잡음의 경우 방향성이 거의 나타나지 않으며, 방향성이 나타나더라도 해당 방위를 따라 그램의 변화량이 크므로 𝜇(p)와 I(p)와 유사할 확률이 낮다. 따라서 토널은 유지되고 잡음은 효과적으로 완만화 될 수 있다. 𝜇(p)는 다음과 같이 정의한다.
여기서 는 Eq. (13)의 도메인 커널을 나타낸다. 윈도우를 구성하는 q에서 p를 제외한 좌표들을 pc 라고 할 때, 는 p와 pc중에서 방향에 위치한 K개의 그램 좌표들을 의미하며 다음과 같이 정의한다.
이때 𝜂(p,pc)는 윈도우에서 p를 원점으로 하는 pc의 방향 벡터와 방향을 갖는 구조텐서의 고유벡터 간의 내적으로 두 벡터의 방향 유사도를 의미하며 다음과 같이 표현한다.
결국 윈도우 Q안에서 방향에 존재하는 좌표 로부터 Eq. (18)을 통해 𝜇(p)를 얻을 수 있으며 이를 기반으로 토널 신호 보존에 적합한 레인지 커널을 만들 수 있다.
III. 실험 결과
3.1 모의 데이터 실험
모의실험을 통해 제안한 방법의 성능을 검증해 본다. LOFAR 그램 두 개를 생성하여 융합을 수행 하였다. 두 LOFAR그램에는 서로 다른 주파수를 갖는 토널 신호를 각각 두 개씩 생성하였으며 가우시안 잡음을 혼합하였다.
| $$\begin{array}{l}s_A(t)=\sum_iA_i\sin(2\pi f_it)+v_A(t)\\s_B(t)=\sum_jB_j\sin(2\pi g_jt)+v_B(t),\end{array}$$ | (21) |
여기서 sA와 sB는 서로 다른 LOFAR그램으로 전시 될 신호를 나타낸다. f1과 f2는 sA를 구성하는 토널의 주파수로 각각 20 Hz와 70 Hz이며, g1과 g2는 sB를 구성하는 토널의 주파수로 각각 40 Hz와 100 Hz 로 설정하였다. 샘플링 주파수는 256 Hz이다. vA(t)와 vB(t)는 가우시안 잡음으로 각각의 잡음 전력은 1.1로 같다. A1와 A2는 토널 신호의 진폭으로 각각 잡음 전력 대비 5 dB, 8 dB가 되도록 설정 하였고, B1와 B2는 각각 7 dB, 6 dB가 되도록 설정하였다. 신호 지속시간은 두 신호 모두 30 s로 설정 하였다.
1 s를 한 프레임으로 두고 50 % 중첩하였으며 매 프레임 마다 신호의 파워 스펙트럼을 구하는 방법으로 LOFAR 그램을 모의 하였다. LOFAR 그램 생성을 위해서는 부가적인 신호처리 과정이 포함될 수 있으나, 이는 본 연구의 취지와 관련이 없으므로 별도의 신호처리 과정은 추가하지 않았다.
먼저 입력 파라미터가 융합 성능에 미치는 영향을 분석해 보았다. 이 때 융합 성능은 토널 성분에 대한 RMSE(Root Mean Square Error)와 평균 잡음 전력의 두 가지 평가지표를 이용 하여 평가하였다. RMSE와 잡음 전력을 각각 C1과 C2로 정의하고 아래와 같이 나타낸다.
| $$C_1=\left[(1/N)\sum_{\mathbf p\in P_{\mathit S}}\left|I_{syn}(\mathbf p)-I_o(\mathbf p)\right|^2\right]^{1/2}.$$ | (22) |
| $$C_2=(1/M)\sum_{\mathbf p\in P_N}I_{syn}(\mathbf p),$$ | (23) |
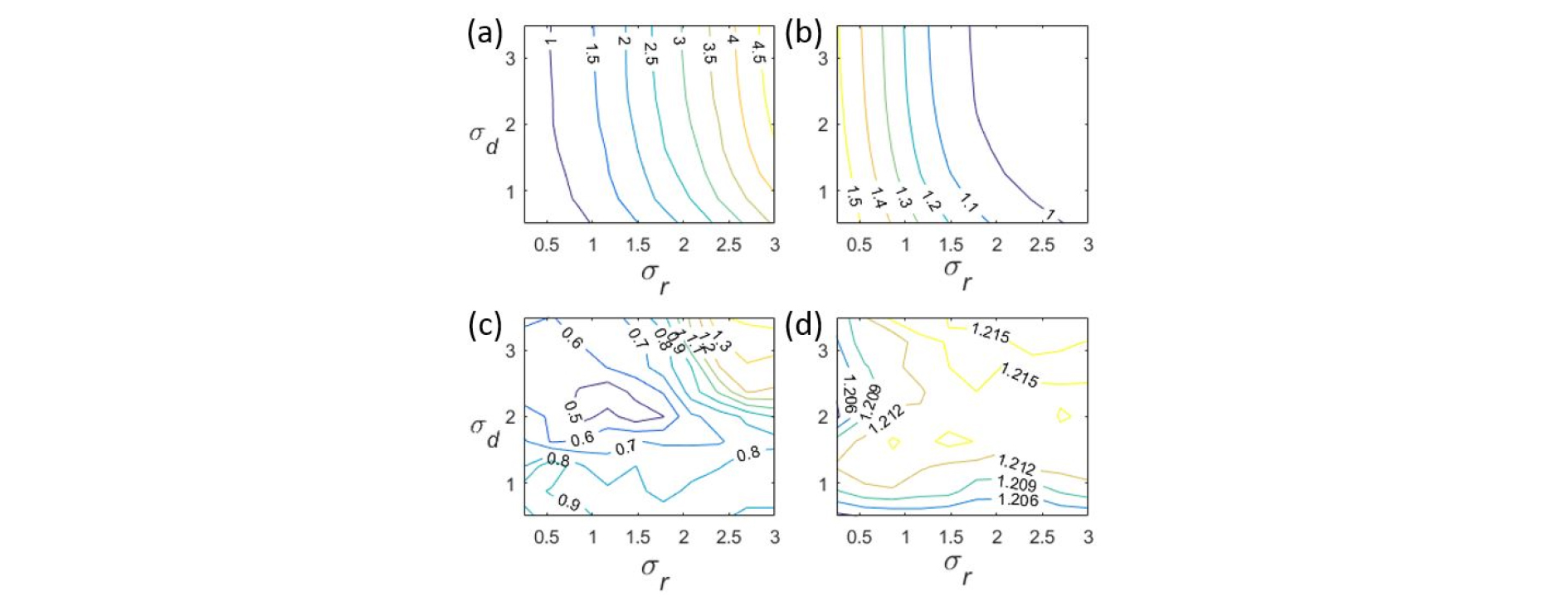
여기서 PS는 그램의 좌표 중 토널이 존재하는 좌표 집합, PN은 토널을 제외한 나머지 좌표 집합이다. N은 토널 좌표의 총 개수, M은 나머지 좌표의 총 개수이다. Isyn은 융합된 LOFAR그램을 나타내며 Io는 토널의 완벽한 융합결과를 의미하는 그램으로 원본 그램에서 토널을 인위적으로 취해 조합한 그램이다. 따라서 Eq. (22)은 융합 전의 토널과 융합 후의 토널 간의 비교를 의미한다. 결과적으로, 융합 시 원본 그램으로부터 토널이 누락되고 그 대신 잡음이 많이 융합될수록 C1 값이 커지게 되며, 반대로 토널이 누락 없이 잘 융합 될수록 C1 값이 작아지게 된다. 마찬가지로 융합 후 평균 잡음전력이 증가 될수록 C2값이 커지게 되고 반대의 경우 C2값은 작아지게 된다. 성능 분석을 위해 Eq. (21)를 이용하여 서로 다른 LOFAR그램을 10 개 씩 생성 한 후 융합을 수행 하였으며 그 결과를 평균하였다. Fig. 3의 (a)와 (b)는 기존 알고리즘의 입력 파라미터별 C1과 C2값을 나타낸 그림이다. 기존 알고리즘은 전반적으로 Eq. (3)에서 정의된 𝜎d에 비해 𝜎r에 민감한 성향을 나타내고 있다. 𝜎r에 대해서는 그 값이 작을수록 C1값이 작아지므로 토널 신호가 잘 융합된 다고 볼 수 있다. 반면 𝜎r이 작아지는 경우 C2값이 증가된다. 즉, 토널 누락을 피하기 위해서는 𝜎r를 작게 하는 것이 좋지만 너무 작은 𝜎r값은 융합 후 평균 잡음 전력을 증가시키는 결과를 낳는다는 뜻이다. 반면 제안하는 방법은 기존 방법에 비해 C2가 커널의 분산 변화에 영향을 적게 받는 것으로 나타나며, 전반적으로 C1 값이 기존기법에 비해 감소된 것을 확인할 수 있다.
위의 결과를 바탕으로 융합에 적절한 입력 파라미터를 선정 하고, 선정된 입력 파라미터를 이용하여 각 알고리즘의 융합 성능을 비교한 결과를 Table 1에 나타내었다. 기존방법의 입력 값 𝜎d와 𝜎r는 Fig. 3의 결과를 바탕으로 각각 2.0과 1.0을 사용하였고, 제안한 방법 A와 B 의 입력 값 𝜎d와 𝜎r도 동일한 값을 사용하였다. 제안한 방법 B의 𝜎min과 𝜎max는 각각 0.01과 2.5를 사용하였다. 𝜎min는 작을수록 원본 값을 보존 시키는데 유리하고 𝜎max는 클수록 완만화 시키는데 유리하다. 그러나 두 값의 차이가 클수록 평균적인 𝜎r값이 커지므로 𝜎max를 너무 크게 해서는 합성 성능이 저하될 수 있다. 따라서 Fig. 3을 통해 𝜎r을 결정하는 것과 같은 맥락으로 𝜎min과 𝜎max의 평균값이 결정되도록 하는 것이 타당하다.
Table 1. Comparison of performance between conventional method and proposed methods.
| Method | Finding maximum | Conventional[2] | Proposed | |
| A | B | |||
| C1 | 0.09 | 1.49 | 0.45 | 1.00 |
| C2 | 1.81 | 1.19 | 1.21 | 1.03 |
Table 1에서는 두 LOFAR 그램에서 큰 값을 취하는 극단적인 융합 방법의 경우에 대한 성능을 함께 비교해 보았다. Table 1에서 최댓값 찾기 방법으로 표현한 이 방법의 경우 RMSE(C1)는 0.09로 매우 낮은 값을 나타내 융합 시 토널의 누락이 거의 없음을 알 수 있다. 반면에 평균 잡음 전력(C2)은 1.81로 융합 전 잡음 전력 대비 약 65 %나 증가하였다. 이 경우 융합 LOFAR의 토널은 신호 대 잡음비가 낮아져 탐지에 큰 불 이익을 유발한다. 기존방법과 제안한 방법의 결과를 비교해 보면 다음과 같다. Table 1에서 기존 방법의 C1은 1.49인데 반해 제안한 방법 A와 B는 각각 0.45과 1.00으로 기존 융합 방법에 비해 토널 융합 성능이 우수한 것으로 나타났다. C2 경우 기존 방법과 제안한 방법 모두 최대값 찾기 방법에 비해 낮고 융합 전 평균 잡음 전력에 근사한 값을 보였다. 제안한 방법 A의 평균 잡음 전력는 1.21로 기존 방법에 비해 근소한 차이로 높게 나왔다. 반면 제안한 방법 B는 1.03으로 기존 방법에 비해 낮은 잡음레벨을 보였다. 이때 융합에 사용한 윈도우 사이즈는 7×7이었다.
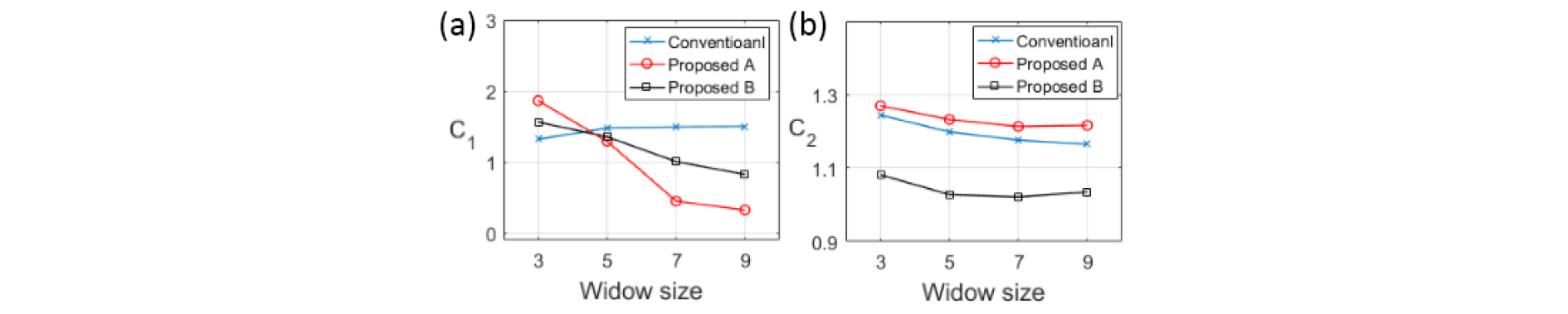
커널 분산 값을 고정시키고 창 크기에 대한 융합 결과를 비교하여 Fig. 4에 나타내었다. C2의 경우 기존 방법은 창 크기에 큰 영향을 받지 않았다. 반면 제안한 방법 A는 창 크기에 영향을 받는 것으로 나타났으며 창 크기가 클수록 융합 성능이 우수한 것으로 나타났다[Fig. 4(a)]. 이는 창 크기가 너무 작으면 비등방성을 도출하기 어렵고, 창 크기가 어느 정도 확보 되어야 토널의 비등방성을 잘 반영 할 수 있음을 나타낸다. 비등방성을 간접적으로 이용하는 방법 B도 마찬가지의 결과를 나타낸다. C1도 창 크기 변화에 다소 영향을 받는 것으로 보이나 토널 신호가 받는 영향에 비해 크지 않다[Fig. 4(b)].
결과적으로 제안한 방법은 기존 방법에 비해 토널 융합 성능이 우수한 것으로 나타났다. 제안한 방법 A는 토널 융합에 가장 효과적이나 잡음레벨이 기존기법에 비해 다소 증가 하는 측면이 있고, 제안한 방법 B는 방법 A에 비해서는 토널 융합 성능이 다소 낮지만 잡음레벨 측면에서 우수하다.
3.2 실측 데이터 실험
해상실험 데이터를 이용해 알고리즘의 성능을 분석 해본다. 본 논문에서 전처리 기법은 융합 성능에 중요한 역할을 하므로 최종적인 융합 성능의 분석에 앞서 전처리 기법의 결과에 대해 분석해 보았다. 이를 위해 기존 방법에서 사용된 1차원 커널에 기반한 필터링 결과와 일반적인 2차원 커널을 이용한 필터링 결과를 함께 비교해 보았다. 일반적인 2차원 커널을 이용한 필터링 방법은 Venkatesh et al.[7] 의 방법으로 Eq. (13)에서 𝜉(p)가 0인 형태를 의미한다.
Fig. 5(a)는 토널 신호가 잡음과 함께 존재하는 경우의 대표적인 LOFAR그램이다. 먼저 1차원 커널 기반 양방향 필터링을 수행 한 결과는 Fig. 5(b)와 같다. 원본 이미지와 비교할 때 토널 구간은 원본 이미지가 유지된 반면 잡음 구간이 완만화 된 것을 볼 수 있다. 일반적인 2차원 방향성 양방향 필터의 결과는 Fig. 5(c)와 같다. 전반적인 결과는 Fig. 5(b)와 크게 다르지 않다. 이 결과가 의미하는 바는 잡음에 의해서도 도메인 커널에 방향성이 나타날 수 있으므로 도메인 커널에 방향성을 부가하는 방법으로는잡음을 효과적으로 완만화 시키지 못한다는 것이며, 일반적인 레인지 커널도 잡음을 완만화 하는데 한계가 있다는 것이다.
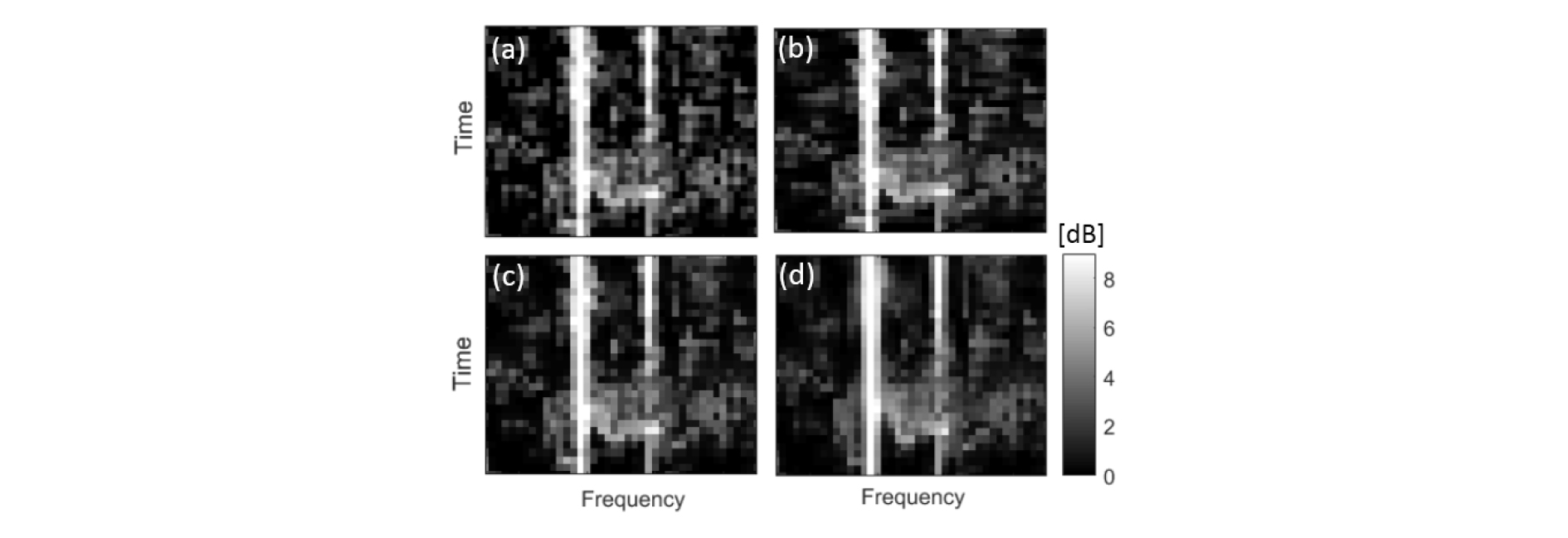
반면 Fig. 5(d)에서 볼 수 있는 바와 같이 제안한 전처리 방법은 토널을 유지 하면서도 잡음을 효과적으로 완만화 시키는 성능을 나타낸다. 제안한 방법의 레인지 커널에서는 도메인 커널 방향의 그램 진폭 평균을 기준으로 평활화가 수행 되는데, 토널에 위치한 그램 좌표에서는 도메인 커널 방향의 그램 평균이 현재 좌표의 진폭과 거의 같아 잘 유지 되는 반면, 잡음 구간에 위치한 좌표에서는 방향성이 나타나더라도 해당 방위의 평균 수준으로 평활화 되기 때문이다.
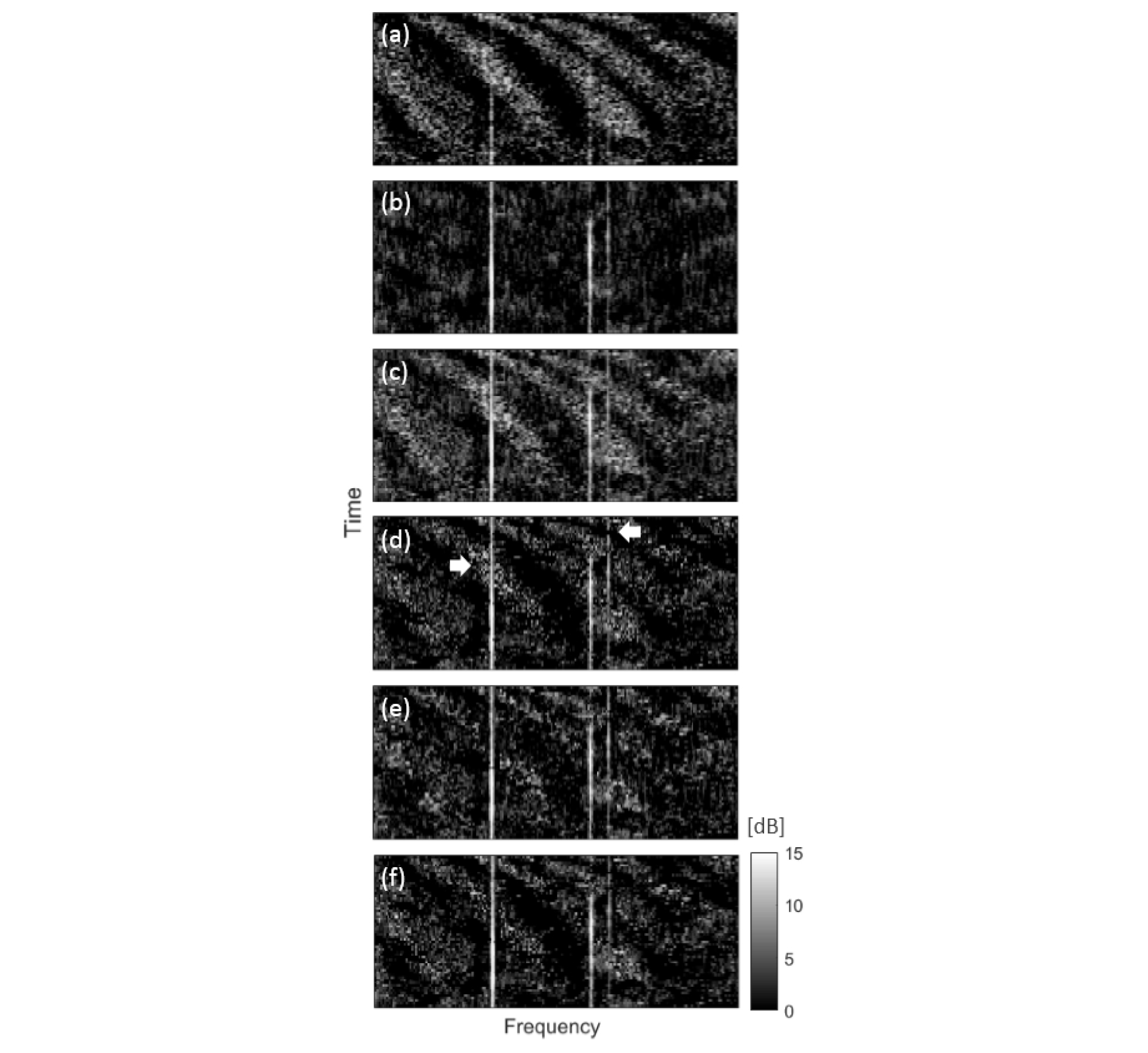
다음으로 제안한 방법의 LOFAR 그램 융합 결과에 대해 분석해 본다. Fig. 6(a)와 (b)는 선배열 센서를 이용하여 동 시간대에 같은 방위에서 측정한 신호를 서로 다른 빔 형성 기법으로 처리 한 LOFAR 그램이다. Fig. 6(a)에서는 토널 신호가 잘 나타나는 반면 Fig. 6(b)에서는 토널 신호가 잘 나타나지 않는다. Fig. 6(c) ~ (f)는 Fig. 6(a)와 (b)의 융합 결과를 나타낸다. 먼저 Fig. 6(c)는 두 LOFAR그램에서 최대값 찾기 방법으로 융합한 LOFAR 그램이다. 토널이 잘 융합 되었으나 잡음 성분도 많이 융합된 결과를 볼 수 있다. Fig. 6(d)는 기존 융합기법의 결과를 나타낸다. 대부분의 토널 신호가 잘 융합되었으나, 토널 중간의 일부가 누락된 것을 볼 수 있다(화살표). 이는 일부 토널 구간에서 Fig. 6(b)의 신호 세기 변화가 너무 완만하여 필터링된 그램의 진폭이 원본 그램의 진폭과 거의 일치하게 되었고 그에 따라 선예도가 Fig. 6(a)의 토널에 비해 높게 나타났기 때문이다. 반면 제안한 방법 A의 경우 융합 시 토널의 누락 현상이 현저히 감소한 것을 볼 수 있다[Fig. 6(e)]. 방법 B의 경우도 마찬가지로 토널 누락 현상이 적게 나타나는 것을 볼 수 있다[Fig. 6(f)]. 방법 B의 결과에도 다소 토널이 누락 되는 현상이 나타나는데 이는 선예도를 기반으로 하는 융합 방법의 한계로 볼 수 있다. 그러나 기존 방법에 비해 향상된 성능을 나타낸다.
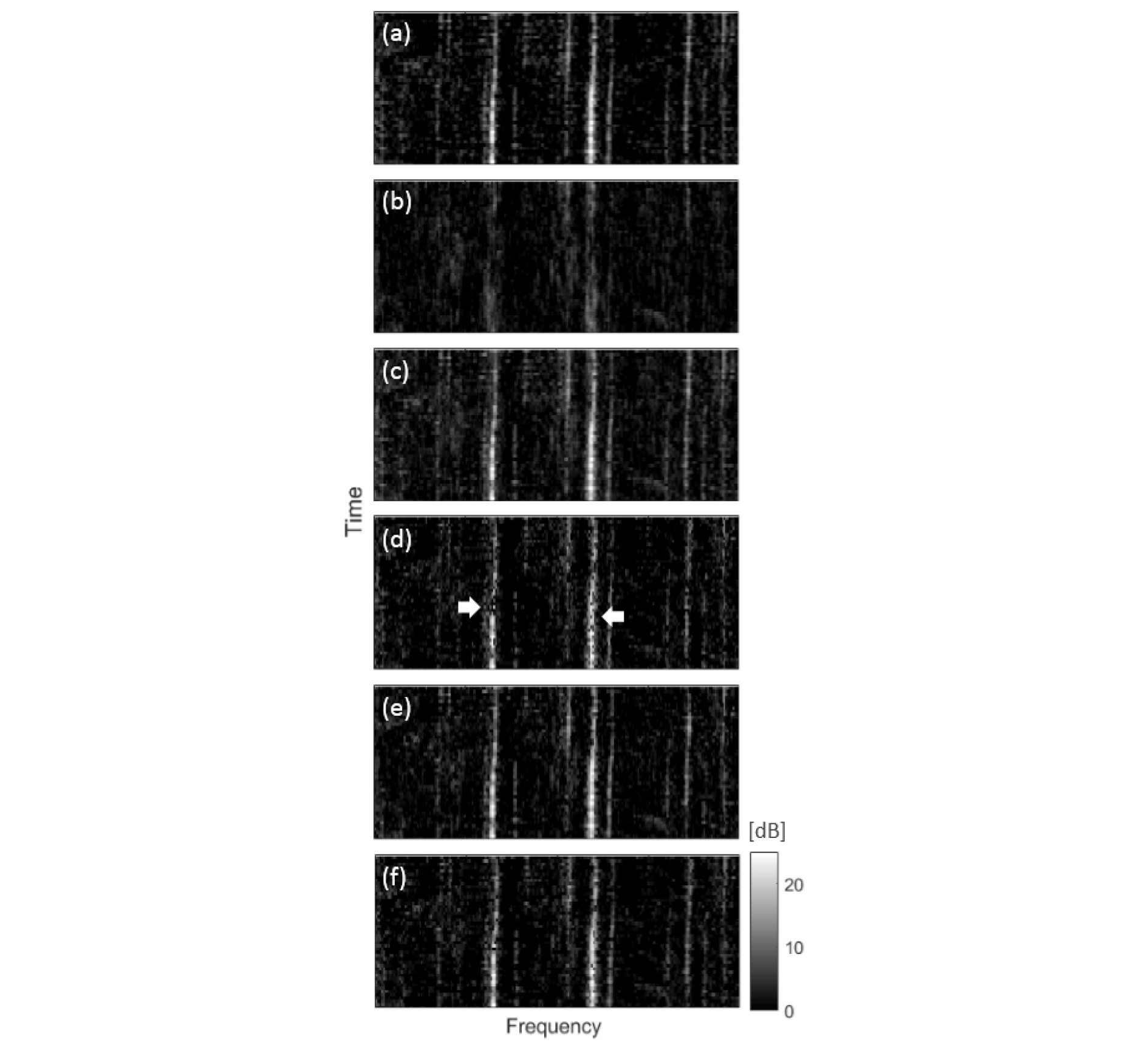
Fig. 7(a)와 (b)는 Fig. 5의 경우와 같은 처리 방법으로 생성된 LOFAR 그램이나 다른 시간, 다른 환경에서 신호를 측정한 결과이다. Fig. 7(a)는 넓은 대역에 걸쳐 발생된 소음에 묻혀 토널 신호가 잘 나타나지 않는다. 반면 Fig. 7(b)에서는 소음의 영향을 덜 받아 토널 신호가 잘 측정된 것을 볼 수 있다. Fig.7(c) ~ (f)는 두 LOFAR그램을 융합한 결과를 나타낸다. 먼저 Fig. 7(c)는 두 LOFAR 그램에서 최대값 찾기 방법으로 융합한 결과이다. Fig. 7(a)의 광대역 소음이 거의 대부분 융합되어 토널의 신호 대 잡음비가 감소된 것을 볼 수 있다. Fig. 7(d)는 기존 기법을 이용해 융합한 결과를 나타낸다. Fig. 7(a)에 나타난 소음을 대부분 제거하고 Fig. 7(b)에 나타난 토널을 잘 융합시킨 결과를 볼 수 있다. 그러나 일부 구간에서 토널의 누락이 발생하였다(우측 화살표). 그러나 제안한 방법 A와 B에서는 이러한 현상이 개선 된 것을 볼 수 있다[Fig. 7(e), (f)]. 또한 기존 기법에서는 토널 부근에 잡음이 많이 남아있는 반면[Fig. 7(d), 좌측 화살표] 제안한 방법에서는 잡음이 효과적으로 제거되었다[Fig. 7(e), (f)]. 이는 토널 구간에서 윈도우 크기만큼 비등방성도가 유지되므로 잡음이 융합되는 것이 방지되기 때문이다. 결과적으로 제안한 방법의 융합성능이 기존의 방법에 비해 우수한 것을 확인할 수 있다.
IV. 결 론
수동 소나의 종류 및 신호처리 기법이 증가하는 상황에서 LOFAR 그램의 융합은 운용자의 부담을 덜어줄 수 있는 하나의 대안으로 적합하다. 그러나 표적의 탐지 및 표적 신호 주파수 분석을 위해 사용되는 LOFAR 그램의 특성 상 잡음 환경에서도 토널 성분이 누락 되지 않도록 유의하여 융합 할 수 있는 방법이 뒷받침 되어야 한다. 본 논문에서 제안한 LOFAR그램 융합 방법은 시간-주파수 영역에 존재하는 토널의 특성을 효과적으로 이용하여 융합을 수행한다. 그 결과 융합 시 잡음레벨이 증가하는 것을 방지하는 기존 기법의 장점을 유지하면서도, 토널 성분을 보다 효과적으로 융합하는 결과를 얻을 수 있었다. 제안한 방법은 다수의 LOFAR 그램에 존재하는 표적의 토널 정보를 하나의 그램으로 축약하여 전시하는 데에 효과적이나 최적의 탐지성능을 보장하지는 않는다. 경우에 따라서는 보다 탐지에 유리한 융합 전의 LOFAR 그램을 선택하여 분석을 수행해야 할 것이다.
