

I. 서 론
해양배경소음에서 선박 수중방사소음이 차지하는 비중이 커짐에 따라 국제해사기구(International Maritime Organization, IMO)를 중심으로 해양생태계 보호를 위한 선박(상선)의 수중방사소음 규제가 논의되고 있다.[1,2] 이에 EU, 일본, 중국 등 조선 및 해운산업의 주요 당사국은 관련 연구를 진행하고 있으며 우리나라에서도 대응 연구를 수행한 바 있다. 이 중에서 선박의 음원준위(SL)를 추정하는 계측표준에 관한 연구가 활발하게 진행되었고 국제표준기구(International Standard Organization, ISO)[3]와 해외 선급[4,5]에서는 각 기관의 가이드라인을 제시하고 있다. 가이드라인에 제시된 선박의 수중방사소음 계측 표준에 따르면 음압준위(SPL)로부터 다음과 같이 거리 보정을 통해 음원준위를 구하게 된다.
| $$SL=SPL+A\log_{10}\left(R_{slant}\right).$$ | (1) |
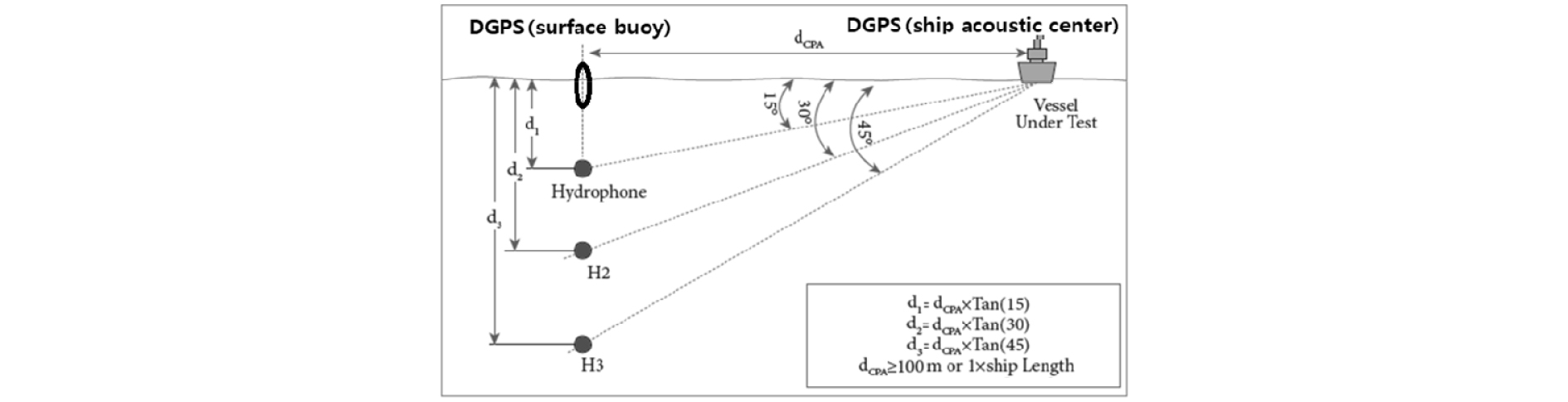
Eq. (1)에서 Rslant는 선박의 음원중심과 계측 센서와의 경사거리를 의미하며, 파라미터 A는 수심에 따라 적용되는 파라미터로서 심해 계측의 경우 그 값으로써 20을 적용하는 것이 일반적이다. 따라서 음원준위를 구할 때 경사거리 Rslant을 추정하는 것이 중요하다. 경사거리는 Fig. 1과 같이 계측 대상 선박의 음원중심 위치와 수중 청음기를 고정하는 해수면 부이에 설치된 두 개의 DGPS(Dynamic Global Positioning System) 로부터 추정하는 것이 일반적이다.[3] 그런데 문제는 선박에서의 음원중심의 위치를 정의하는 것이 쉽지 않고(실제로 각 계측표준에서 제시하는 선박의 음원중심 위치가 서로 다름), 조류 등의 영향에 따라 청음기의 실제위치와 해수면 부이의 위치는 상이하게 된다는 것이다. ISO 17208-1:2016(E)[3]에 따르면 선박의 최소근접거리에서 경사거리 Rslant의 오차는 10 % 이내여야 하며 청음기 고정라인의 경사각도(drift angle)가 5° 이상인 경우 경사각도를 고려하여 경사거리를 재산정하여야 한다. 정확한 경사각도 및 경사거리의 산정을 위해서는 수중 음원과 청음기의 위치를 알아야 한다.
수중 음원과 청음기의 위치를 추정하기 위해 정합장처리 또는 지음향학적연산 기법이 널리 활용되었다.[6,7] 그러나 두 신호처리기법(특히 정합장처리)은 청음기배열을 활용하는 것이 일반적이며 Fig. 1과 같이 청음기의 개수가 제한적이고 서로 연동되어 있지 않은 경우에는 적용에 제한이 있다.
셉스트럼 분석은 지진파에서 반사파를 검출하기 위해 처음 개발된 이후에 여러 분야에 적용되어 왔다.[8,9] 특히, 수중음향 분야에서는 셉스트럼 분석을 통해 다중반사 구조 식별을 위해 적용된 바 있다.[10]
Krishnakumar et al.[11]은 셉스트럼 분석을 통해 수심 약 30 m의 천해에서 계측된 선박소음의 직접 도달파와 해수면 반사파의 도달시간 차이를 계산한 후 기하학적 관계로부터 선박과 청음기의 경사거리를 추정하였다. 이 때, 수중 음속과 음원의 깊이 그리고 청음기의 깊이는 모두 일정하다고 가정하였다. An과 Chen[12]은 수치시험을 통해 직접 도달파와 반사파의 도달시간 차이를 이용한 음원과 청음기 사이의 경사거리 추정에 대한 연구를 수행하였다. 이들은 경사거리 추정 정밀도는 음원과 청음기의 거리가 늘어날수록 증가하였고 수중 음속분포가 일정하지 않은 경우에는 추정정도가 현저히 떨어짐을 보였다.
이에 본 논문에서는 비균일 음속에서 음원과 청음기의 위치를 동시에 추정할 수 있는 음향학적 역산 기법을 제안하였다. 제안된 역산기법을 실측 데이터에 적용한 후 추정 값과 실제 값을 비교하여 본 기법의 효용성을 검토하였다.
II. 음향역산법
2.1 셉스트럼 분석
셉스트럼은 다양한 형태로 정의될 수 있다.[8] 본 연구에서는 계측된 선박소음 s(t)로부터 Eq. (2)와 같이 셉스트럼C(t)를 정의하였다.
| $$C\left(t\right)=\mathfrak I^{-1}\left\{\log_{10}\left(\left|\mathfrak I\left(s\left(t\right)\right)\right|\right)\right\}.$$ | (2) |
Eq. (2)에서 는 퓨리에 변환을 의미하고 은 역 퓨리에 변환을 의미한다.
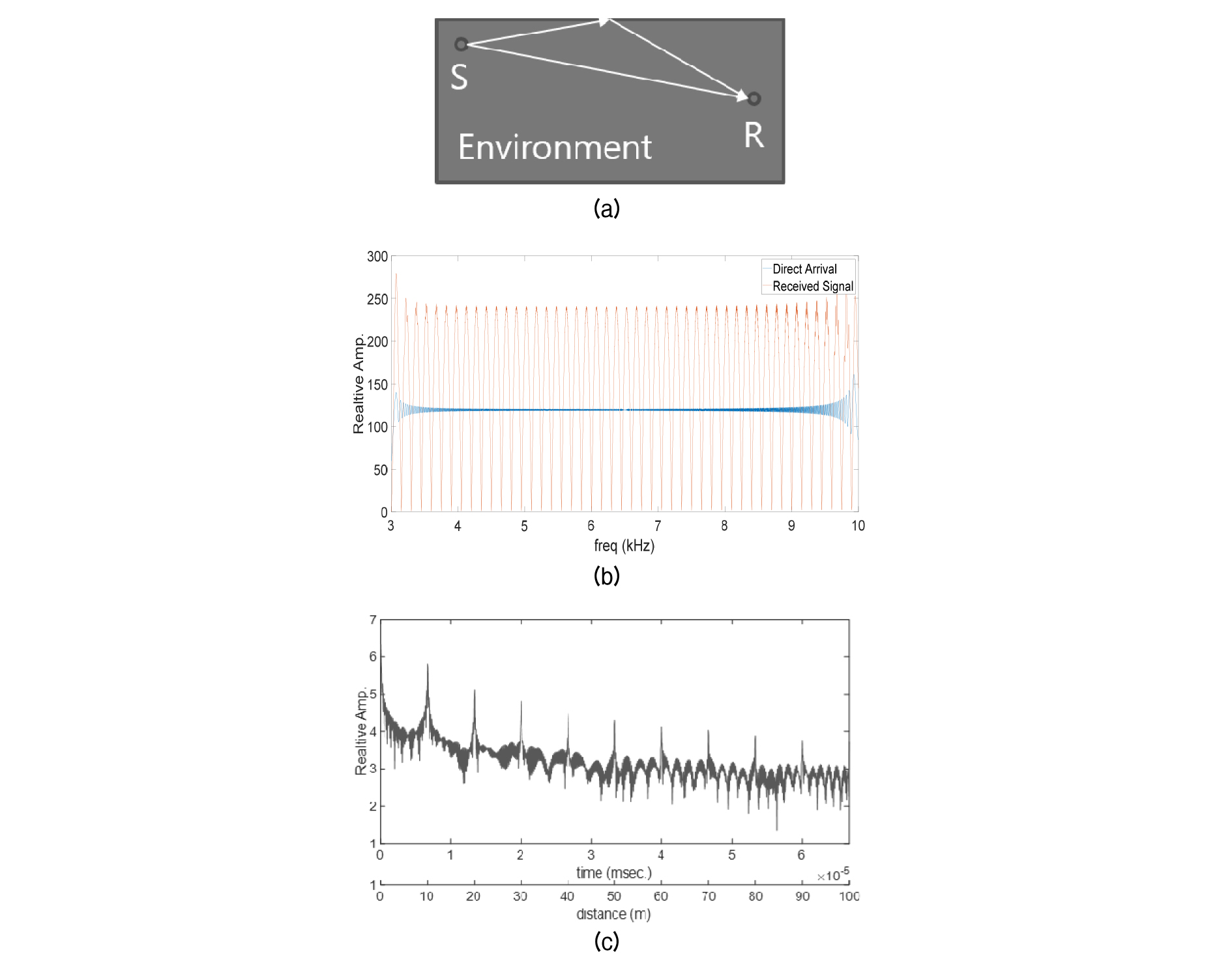
Fig. 2(a)와 같이 해수면이 있는 반 무한공간에서 음원(S)과 청음기(R)가 있는 경우를 가정하자. 음원에서 3 kHz ~ 10 kHz의 LFM 신호를 송신할 때, 계측된 신호는 Fig. 2(b)와 같이 음원으로부터 청음기까지 직접 도달파와 해수면 반사파로 구성되어 있다. 이 때, 직접파와 반사파의 거리 차이는 10 m이다. Fig. 2(b)에서 계측 신호의 스펙트럼은 직접 도달파와 반사파의 보강 및 상쇄 간섭에 의해 피크와 널을 주기적으로 보임을 알 수 있다. Fig. 2(c)는 계측신호의 셉스트럼 분석 결과를 보여준다. 셉스트럼 신호는 여러 피크가 포함되어 있는데, 각 피크 사이의 거리는 일정하게 10 m로써, 직접파와 반사파의 거리 차이와 일치함을 알 수 있다. 이상의 예와 같이 셉스트럼 결과로부터 다중 반사파의 상대적 도달시간, 즉, 도달 거리를 추정하는 데 유용한 정보를 얻을 수 있다.
2.2 음향학적 역산 기법
음향학적 역산은 Fig. 3과 같이 실제 계측 데이터의 셉스트럼 이미지[Fig. 3(a)]와 수치해석으로 구한 셉스트럼 이미지[Fig. 3(b)]를 비교하여 가장 좋은 상관관계를 주는 최적 인자를 찾아내는 방식으로 구성되었다. Fig. 3(b)의 수치모의를 위해서는 시간 별 선박의 음원중심과 청음기 간의 상대위치 정보가 필요하다. 선박의 음원준위 계측표준[3,4]에 의하면 대상 선박은 정해진 항로를 따라 일정한 선속으로 왕복 직선 기동을 원칙으로 한다. 선박이 직선 기동을 하는 경우 선속과 진행 방향이 주어진다면 특정 시간에서 선박의 음원중심 위치를 쉽게 구할 수 있고, 선박의 음원중심과 청음기 사이의 상대위치로부터 음전달 모델을 활용하여 Eq. (2)의 s(t)를 계산 후 C(t)를 순차적으로 얻을 수 있다. 이러한 과정을 전체 항적에 대해 반복하면 Fig. 3(b)를 구 할 수 있다. Fig. 3의 셉스트럼 이미지에서 y-축은 샘플 개수로서, 본 샘플 개수를 샘플링 주파수로 나누면 Fig. 3의 y-축은 Fig. 2(c)의 x-축의 시간에 해당함에 유의하기 바란다.
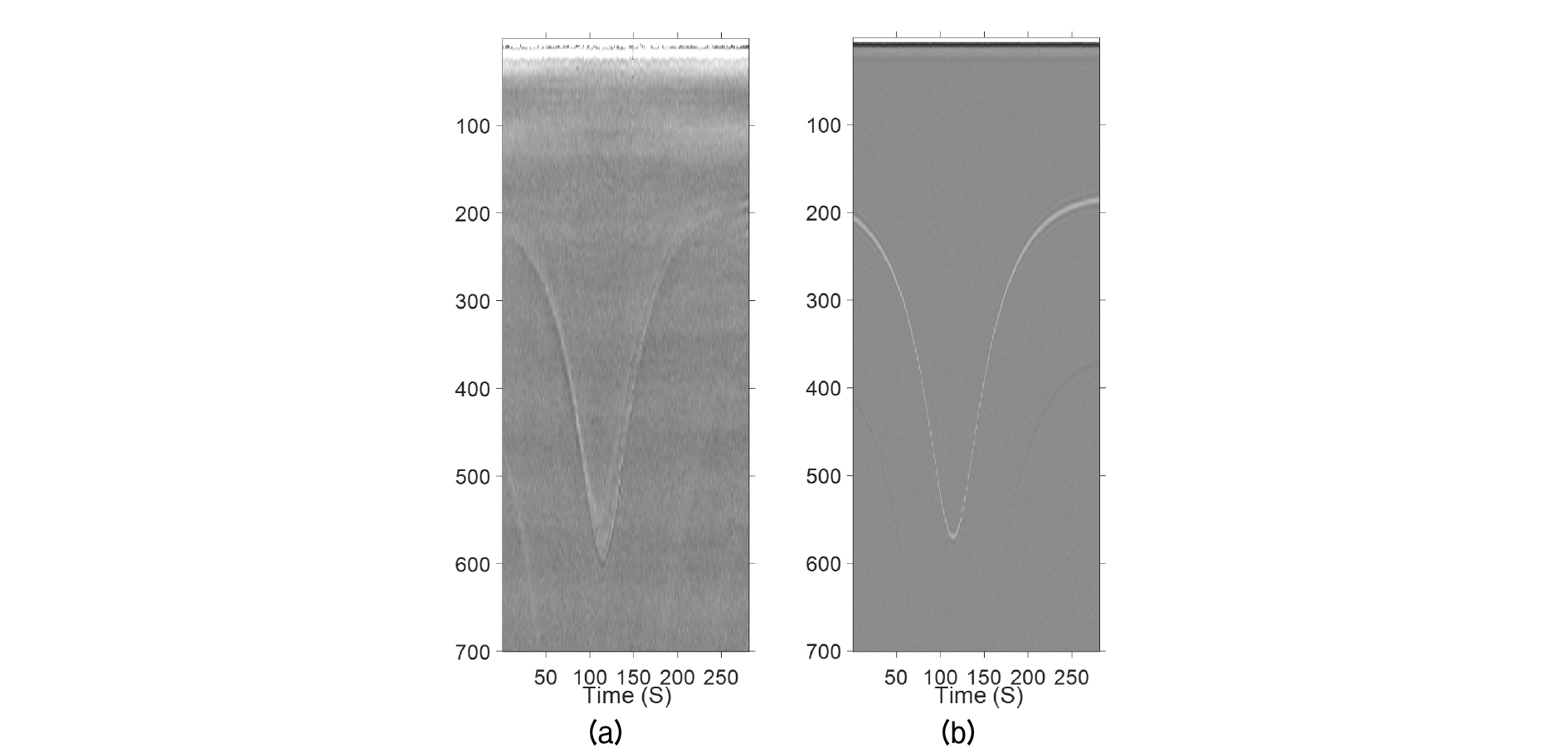
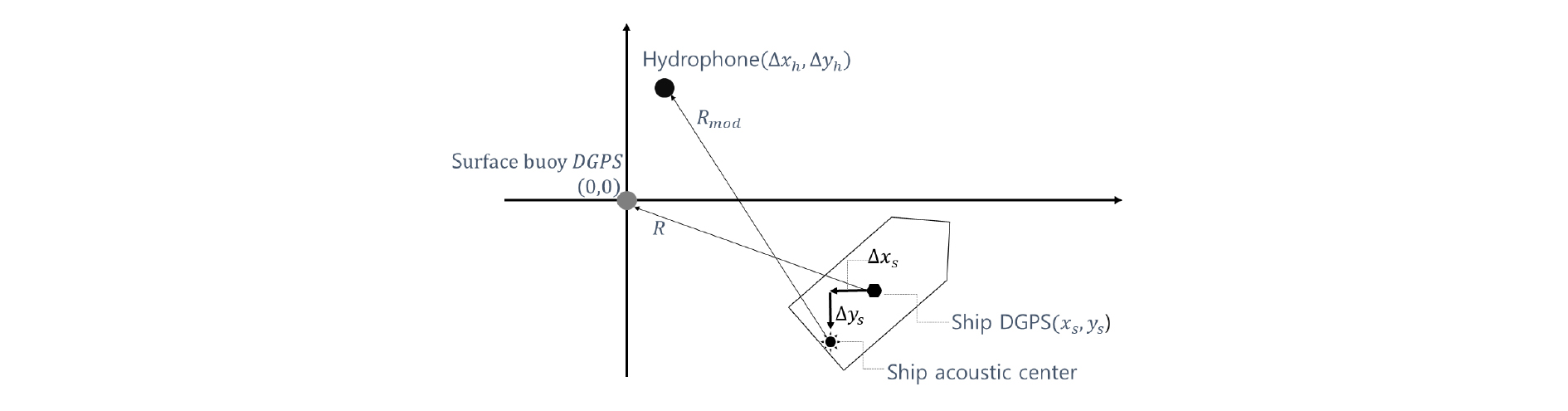
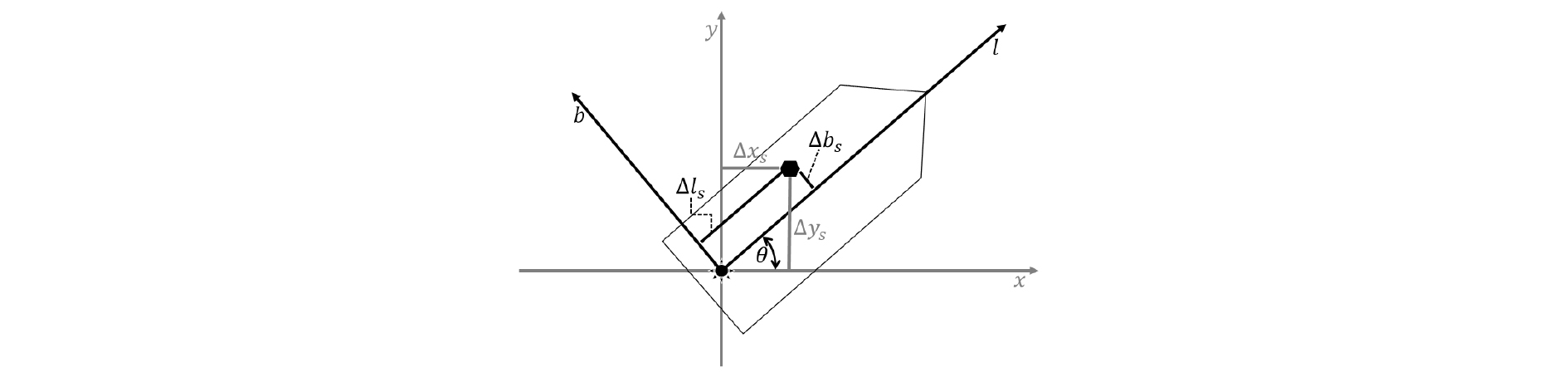
Fig. 4는 해수면에 평행한 2차원 평면에서의 좌표 정의를 나타낸다. 해수면 부이 DGPS 위치를 원점으로 할 때, 해수면 부이로부터 수중청음기의 상대좌표를 라 한다. 또한 선박 DGPS의 위치를 이라 할 때, DGPS를 기준으로 음원중심의 상대좌표를 로 정의한다. 따라서 두 DGPS로부터 추정된 수평거리(R)는 이 되나 선박의 실제 음원중심과 수중 청음기와의 수평거리(Rmod)는 가 된다. 이 때, 와 는 각각 와 를 의미한다. 선박의 음원중심과 청음기의 수심을 각각 와 라 할 때, 경사거리(Rslant)는 이 된다.
최적화를 위한 목적함수 는 Eq. (3)과 같이 계측된 신호와 모의 신호의 셉스트럼 이미지(Fig. 3)간의 정규화된 2차원 상관도로 정의하였다.
Eq. (3)에서 은 역산인자로 구성된 인자벡터이고, 첨자 m과 s는 각각 계측과 모의를 의미한다. 또한, C는 셉스트럼 이미지 행렬을 뜻하며 연산자 T, 는 각각 전치와 벡터의 크기 그리고 행렬의 대각 성분 벡터를 각각 의미한다. Eq. (3)에서 은 음선기반 모델인 BELLHOP[13]을 사용하여 계산하였다. 이 때, 역산인자 벡터는 (, , Hs, Hh)으로 정의하였다. 만약 수층의 음속분포와 수심, 해저면 지음향 인자 등 환경자료가 존재하지 않거나 불확실한 경우에는 역산 인자에 포함하여 동시에 추정할 수 있을 것이다. 그러나 본 연구에서는 실측된 환경정보(3장 참조)를 활용하였다. Eq. (3)의 목적함수를 최소로 하는 최적 인자를 찾기 위해 광역 최적화 기법의 일종인 VFSR(Very Fast Simulated Reannealing) 알고리즘[14]을 적용하였다.
한 방향으로 기동하는 선박의 셉스트럼으로부터 구한 와 에는 청음기의 위치정보와 선박의 음원중심 정보가 혼재되어 있다. 따라서 청음기의 위치와 음원중심의 위치를 각각 구하기 위해서는 서로 다른 두 방향으로 기동한 계측결과가 필요하다. 이러한 문제는 선박의 방사소음 계측 표준절차에 따르는 왕복 기동으로부터 쉽게 해결될 수 있다. Fig. 4에서 정의된 선박의 DGPS 위치와 음원중심과의 상대 위치를 Fig. 5와 같이 선박의 길이방향과 폭방향으로 변환한다. 이는 절대 좌표계로 표현된 에 비해 선박의 고정좌표계로 표현된 가 음원중심의 위치를 직관적으로 파악하는데 더 용이하기 때문이다. 선박이 과 의 방향으로 기동할 때 역산을 통해 추정된 와 으로부터 음원중심 위치와 수중청음기의 위치는 Eq. (4)의 관계식으로 구할 수 있다.
III. 계측 데이터
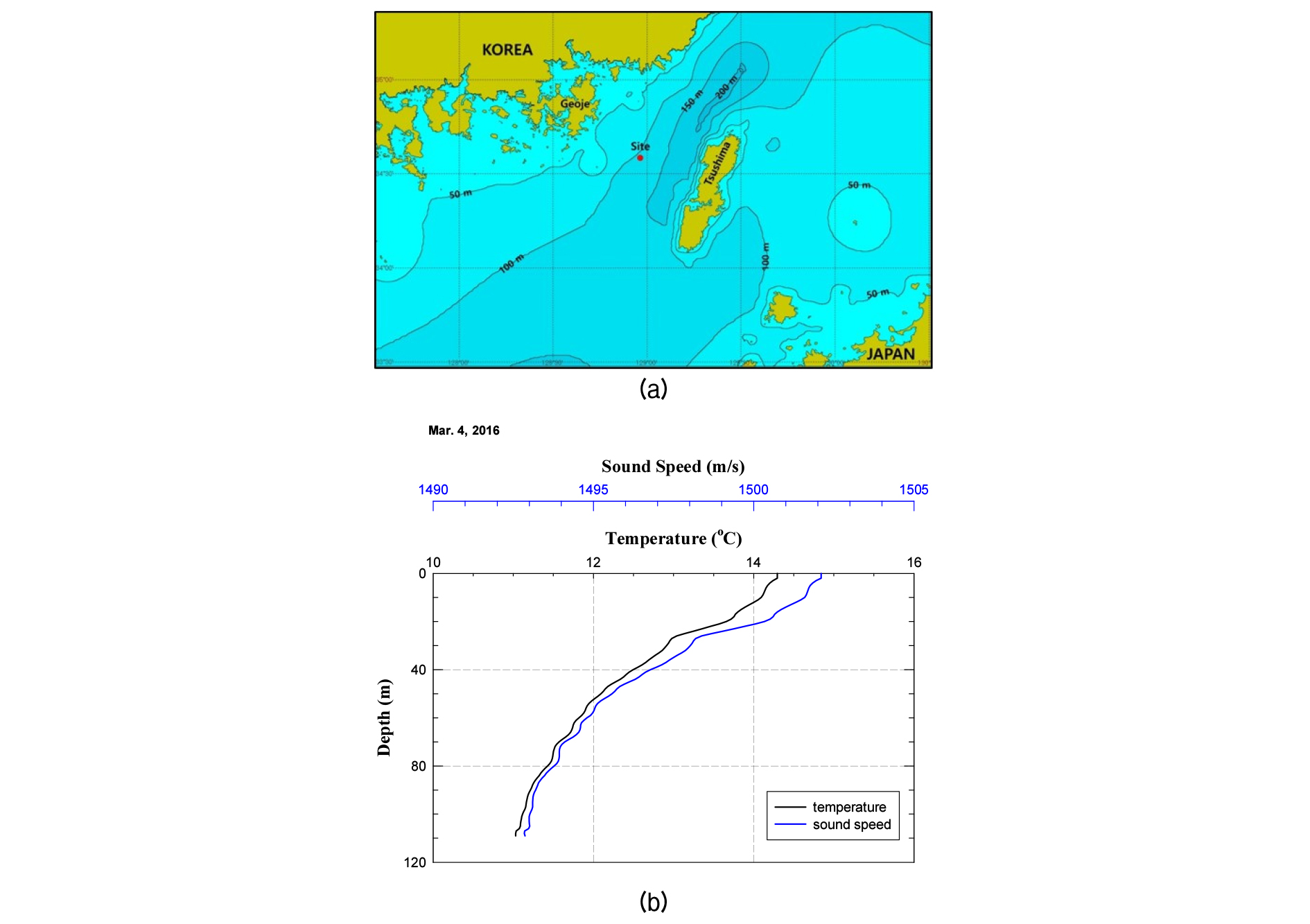
2016년 3월 대한해협[Fig. 6(a)]에서 10,000 TEU급 컨테이너 선박을 대상으로 수중방사소음 계측시험을 수행하였다. 계측 대상선의 제원은 길이 308 m, 폭 49 m이며 시험 당시 선미 흘수는 10 m였다. 계측시험이 수행된 해역은 수심 110 m로 일정하였으며, 동일 해역에서 계측된 수심에 따른 음속분포는 Fig. 6(b)와 같다. 시험해역 해저지층의 지음향학적 특성은 계측하지 못했으나, Kim et al.[15]에 의하면 본 해역은 진흙과 모래의 혼합층 (muddy sand)으로 구성되었고, 평균 음속은 1766 m/s, 밀도는 2.0 g/cm3으로 알려져 있다. 계측시험은 총 3시간에 거쳐 진행 되었으며 이 동안에 선박은 60 % MCR(Maximum Continuous Rating), 75 % MCR 그리고 90 % MCR로 왕복 기동을 하였다. 수중방사소음 계측을 위한 수중청음기는 수심 24 m, 52 m, 90 m의 세 곳에 설치되었고, 이 중 90 m에 설치된 청음기를 사용하여 셉스트럼 분석과 역산을 수행하였다. 계측된 데이터는 60 kHz의 샘플링 주파수로 이산화 된 후 저장되었다.
3 kHz ~ 10 kHz의 주파수대역을 대상으로 셉스트럼 분석을 수행하였다. 일반적인 선박(특히 상선) 수중방사소음의 특성을 살펴보면 저주파 대역에서는 기계류에 의한 소음과 프로펠러의 캐비테이션에 기인한 유체 소음이 혼재되어 있고, 고주파 대역에서는 주로 프로펠러 캐비테이션 소음이 지배적이다.[1] 본 연구에서는 상선의 주 소음원인 캐비테이션 소음에 집중하기 위해 3 kHz 이상의 고주파 대역을 대상으로 하였다. 셉스트럼 분석에서는 주파수 대역이 넓을수록 신호의 분해능이 높아진다. 그런데 두 신호의 상관관계를 기반으로 한 역산에서는 분해능이 너무 높아도 역산의 결과가 좋지 않은 경향이 있었다. 본 연구에서는 3 kHz ~ 10 kHz 대역이 역산에 적합한 것으로 판단되었으나, 선박 수중방사소음의 셉스트럼 분석에서 주파수 대역의 영향에 대한 추가 연구가 필요할 것으로 보인다.
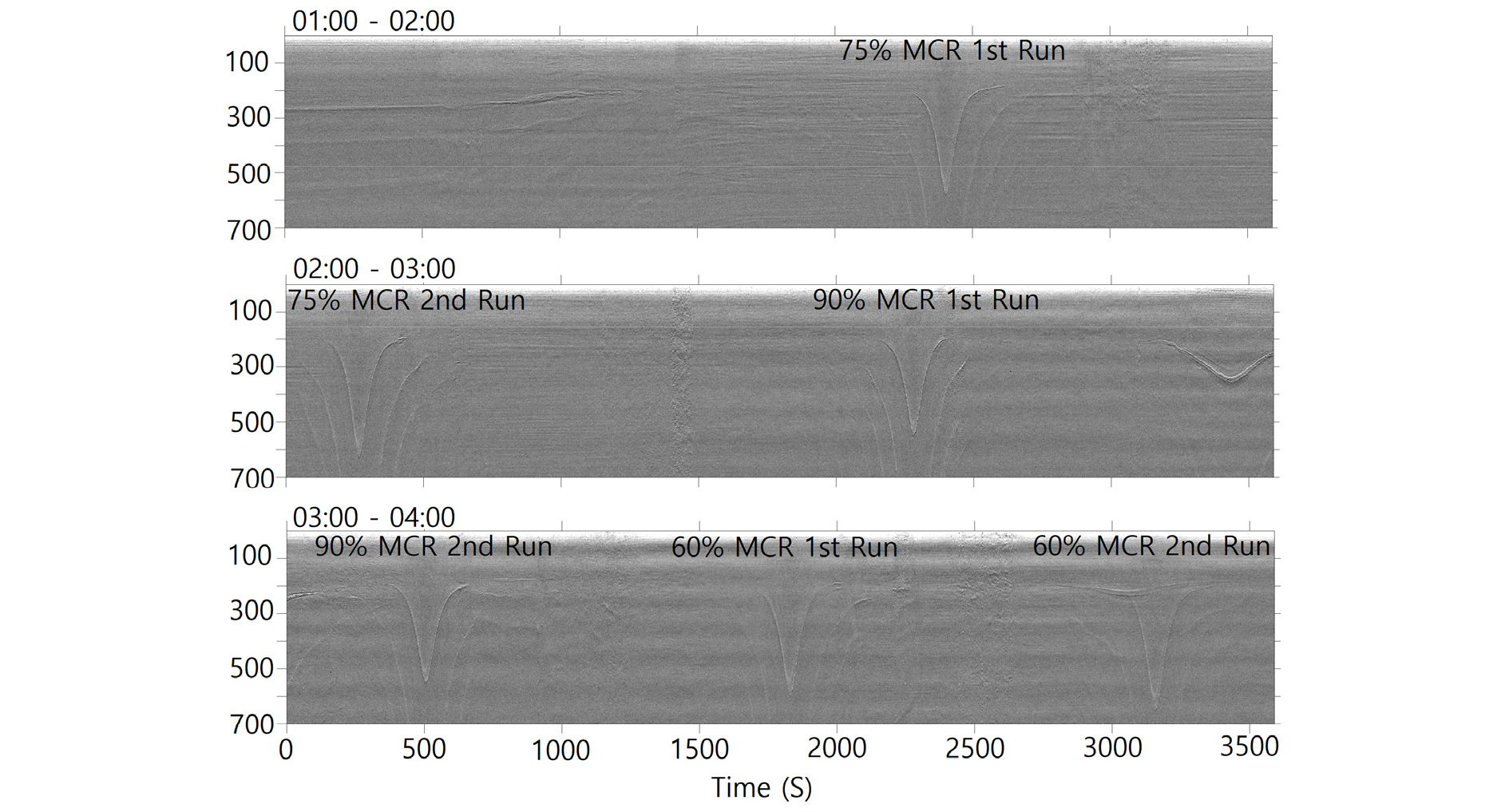
Fig. 7은 전체 계측 데이터의 셉스트럼 분석결과를 보여준다. 본 셉스트럼 이미지에서 y-축은 Fig. 3에서와 같이 샘플 개수를 의미한다. 그림에서 표시된 바와 같이 각 시험조건의 시간 대역에서 명확한 다중반사 이미지를 확인할 수 있다. 선박과 수중청음기의 위치를 고려할 때, 직접 도달파와 해저면 반사파의 상호작용이 가장 지배적인 성분이 되며, 그림으로부터 선박이 계측 해역에 도달하였을 때에는 두 신호의 도달 시간차에 해당하는 피크 성분과 그 조화 성분들이 명확히 관측됨을 알 수 있다. 반면에 직접 도달파와 해수면 반사파의 경우 두 신호의 도달 시간차는 약 100 샘플(5 ms에 해당함) 이내였으나 이미지 상에서는 잡음이 많아서 해당 피크가 명확히 식별되지 않았다. 따라서 본 논문에서는 직접 도달파와 해저면 반사파에 의한 성분을 이용하여 음향역산을 수행하였다. 한편, 약 02:55 경에 대상선에 의한 것과는 확연히 다른 반사패턴이 발생하였는데 이는 계측 해역 인근을 지나간 다른 선박의 수중방사소음에 의한 것으로 판단된다.
IV. 역산 결과
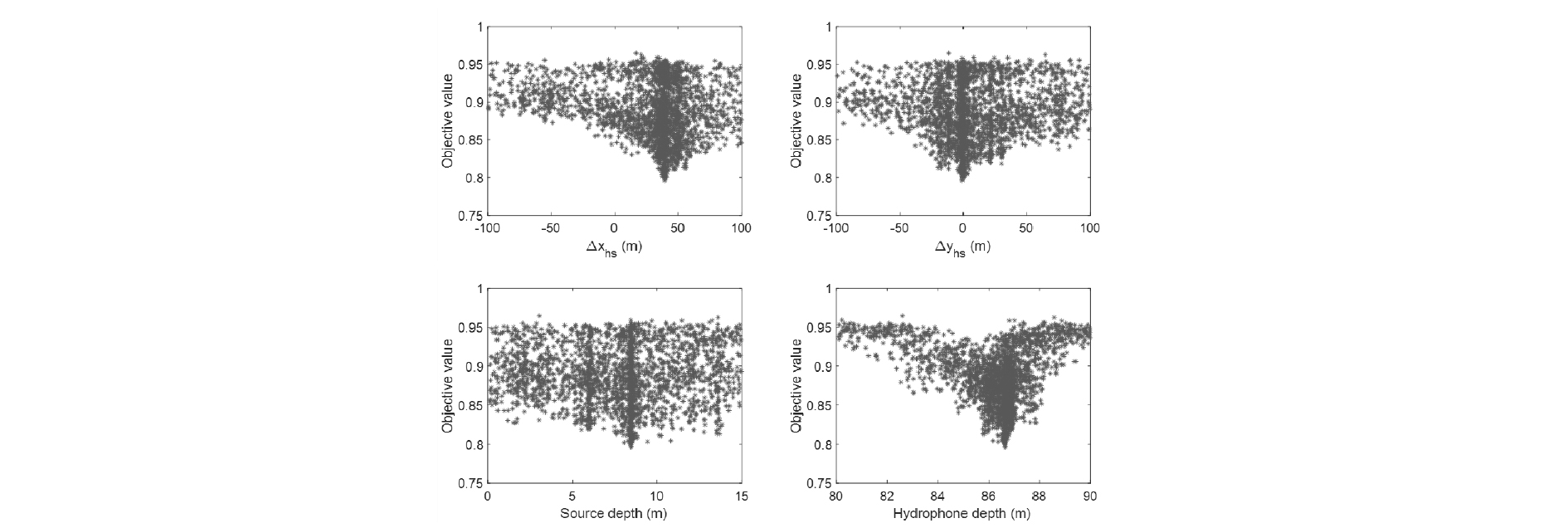
계측시험 세팅 및 선박의 기본 제원을 고려하여 최적화 과정에서 역산 인자(, , , )의 탐색범위를 각각 [-100 m, 100 m], [-100 m, 100 m], [0 m, 15 m] 그리고 [80 m, 90 m]으로 제한하였다. Fig. 8은 90 % MCR 조건에서의 첫 번째 기동 시 계측데이터에 대해 최적화 과정에서 추출된 각 인자 값과 해당 목적함수 값의 산포도를 나타낸 것이다. 본 역산을 위해 총 2,500회의 시뮬레이션이 수행되었다. 일반적으로 탐색범위 내에서 최적 인자의 목적함수 값과 주변의 목적함수 값의 차이가 상대적으로 클수록 목적함수에 대한 인자의 민감도가 크다고 평가할 수 있고, 민감도가 큰 인자가 그렇지 않은 인자에 비해 추정 정도가 높을 것으로 기대할 수 있다. Fig. 8로부터 음원중심의 수심()이 민감도가 가장 낮았고, 청음기의 수심()과 청음기와 음원중심의 수평 위치 차이 ()의 민감도가 큼을 알 수 있다.
선박의 기동 조건에 따른 역산결과를 Eq. (4)에 따라 DGPS 기준 상대 위치로 환산한 후 Table 1에 정리하였다. 시험 당시 선박의 DGPS 는 프로펠러가 위치한 직상방의 갑판에 설치되었으나, 역산 결과 선박의 음원중심은 DGPS가 설치된 위치에 비해 길이방향으로 6.2 m 후방(선미방향), 폭방향으로 –12.8 m(좌현방향) 그리고 수심 8.4 m로 추정되었다. 또한 해수면 부이는 수중 청음기의 위치를 기준으로 평균 195°의 남남서 방향으로 평균 78 m 가량 표류한 것으로 추정되었다. 이때 청음기 고정라인의 경사각도는 약 42°로서 ISO 17208-1:2016(E)[3]의 허용치(5°)를 훨씬 초과한 결과이다. 시험해역 인근에 위치한 국립 해양조사원의 해양관측부이에서 동일 시간대에 계측한 표층유향[16]이 약 254°임과 청음기 고정을 위한 라인의 설치 여유(약 20 m)를 고려할 때, 해수면 부이의 표류방향 추정 결과는 타당하나 표류 거리가 약간 크게 추정되는 경향을 보였다. 본 역산결과를 토대로 선박의 음원중심과 부이로부터 청음기의 상대적 위치를 정확히 추정하였다고 보기에는 어려움이 있다. 특히, 선박의 길이방향 음원중심의 추정치 간의 편차가 가장 크게 나타났는데, 이러한 오차는 역산에서 청음기의 개수를 늘릴수록 줄어들 것으로 판단된다.
Table 1. Ship acoustic center positions relative to the ship DGPS and hydrophone position relative to the surface buoy DGPS converted from inversion results. Depths of the acoustic center and the hydrophone are also given in the table.
Fig. 9에는 시험조건 별 선박의 DGPS와 해수면 부이의 DGPS를 기준으로 계산한 경사거리(그림에서 빨간 선)와 역산결과 음원중심과 청음기의 위치를 기준으로 계산한 경사거리(그림에서 파란 선)를 제시하였다. 그림에서 확인할 수 있듯이 DGPS를 기준으로 산정한 최소근접거리(CPA) 도달 시간과 역산 결과와는 차이가 있다. DGPS로부터 산정한 경사거리를 기준으로 할 때 두 경사거리 간의 평균 오차는 첫 번째 기동과 두 번째 기동에서 각각 2.7 % 와 9.8 %로 추정되었다. 첫 번째 기동 대비 두 번째 기동에서오차가 더 큰 이유는 두 기동에서의 선속 차이에 기인한다. 첫 번째 기동은 남서방향(약 230°)으로 조류를 타고 운항하였고, 두 번째 기동은 북동방향(약 50°)으로 조류를 거슬러 운항하였다. 따라서 두 번째 기동 시 선속이 첫 번째 기동 시 선속에 비해 느려졌으므로 DGPS 기준 최소근접거리 도달 시간과 역산 결과 최소 근접거리 도달 시간과의 차이가 첫 번째 기동에 비해 상대적으로 크게 된다. Fig. 9에는 기동 조건 별 셉스트럼과 역산결과 추정된 직접 도달파와 해저면 반사파의 도달시간 차이(그림에서 빨간 선)를 비교하여 나타내었다. 비교 결과 추정된 도달시간 차이는 셉스트럼에서 직접 도달파와 해저면 반사파의 상호작용에 해당하는 첫 번째 피크 성분과 잘 일치하는 것이 확인되었다.
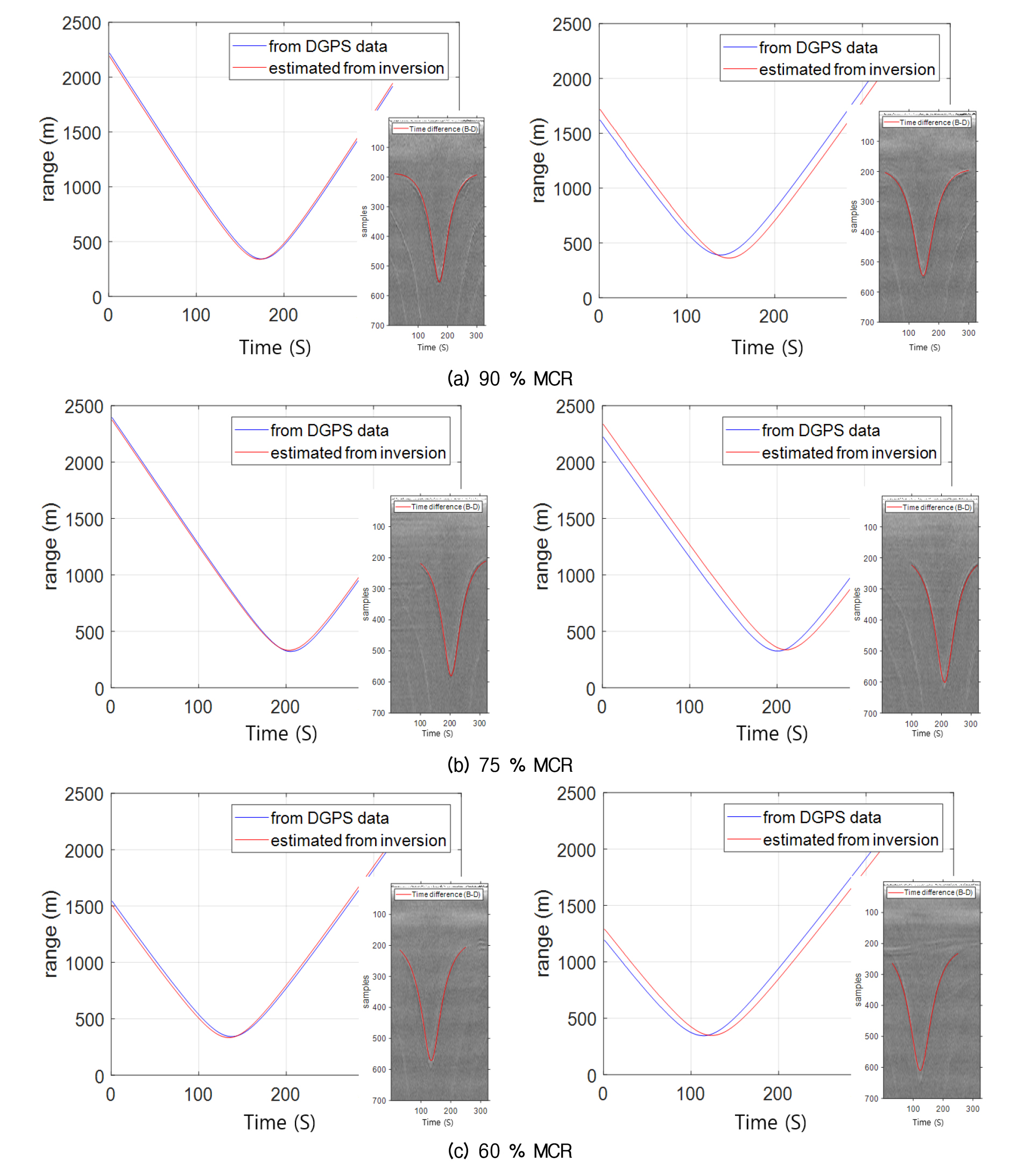
Fig. 9.
Comparison of slant ranges. The blue line is estimated from the DGPS data of ship and surface buoy and the red line is estimated from inversion. Cepstrums are also shown in the figure. Time differences between direct arrival and bottom reflected signal are given as red lines on the cepstrums.
V. 결 론
본 논문에서는 선박 소음의 셉스트럼 분석을 이용한 음향학적 역산기법을 제안하였다. 제안된 역산기법을 왕복 직선 기동을 하는 선박의 수중방사소음 계측 데이터에 적용하여 선박의 음원중심과 수중 청음기의 위치를 추정하였으며 추정결과의 타당성을 검토하였다. 검토결과 제안된 역산기법을 통해 선박의 음원중심과 청음기와의 경사거리, 해수면 부이 고정라인의 경사각도, 그리고 최소근접거리 도달시간 등을 추정할 수 있었으나, 추정 정확도는 다소 떨어지는 것으로 분석되었다. 이러한 부정확성은 단일 청음기 활용에 따른 한계로부터 기인하며 청음기의 개수가 늘어날수록 추정 정밀도가 향상될 것으로 판단된다.
본 연구에서는 역산인자를 수중청음기와 선박의 음원중심 위치로 한정하였다. 그러나 제안된 역산기법은 수층의 음속분포와 수심, 해저면 지음향 인자 등 다양한 환경인자의 역산에 활용될 수 있으며 이에 대한 후속 연구를 진행할 예정이다.
