

I. 서 론
II. 모형 시험
III. 유동 수치해석 기법
IV. 추진기 소음의 수치예측 기법
V. 결과 및 검토
5.1 유동해석 결과 및 검증
5.2 추진기 소음 수치예측 결과 및 검증
VI. 결 론
I. 서 론
최근의 잠수함 개발 동향은 점차 대형화, 고속화되는 추세로, 그로 인한 추진기 소음 수준에 관한 관심이 증가하고 있다. 잠수함의 소음은 함정의 생존성 및 작전 수행능력과 직결되어 군사적으로 매우 중요하게 여겨져 왔다. 함정의 여러 소음원 중 수중 추진기의 소음은 지배적인 소음 수준을 가질 뿐만 아니라, 추진기 날개의 개수 등 형상에 의한 독특한 음향학적 특성을 보이기 때문에 특히 더욱 중요하다. 하지만 기계류 소음원과 달리 소음원이 선체 외부에 위치하기 때문에 차폐가 불가능하여 소음원 자체의 저소음화가 필요하다. 이러한 추진기 소음에 관한 기술은 군사학적으로 매우 중요하여 여러 선진국에서는 많은 연구가 진행된 것으로 알려져 있다. 하지만 수중 추진기 소음에 관한 연구는 각국의 군사기밀로 엄격히 취급되어 매우 제한적인 접근만이 가능하다. 따라서 자체적인 추진기 소음의 예측 기술 확보는 군사적으로 중요한 문제라고 할 수 있다.
대형화, 고속화되는 잠수함 추진기는 캐비테이션의 발생 가능성이 점차 커져 수중 추진기의 공동 소음의 정확한 예측이 필요하지만, 일반적인 잠수함의 운용은 깊은 심도에서 잠항 형태로 이루어진다. 이러한 깊은 심도에서 잠수함 추진기는 높은 정수압에 의해 공동이 발생하지 않는 비공동 상태에서 작동한다. 비공동 상태의 추진기는 일반적으로 저주파 대역에서 발생하는 불연속적인 톤 소음이 전체 소음수준을 결정하는 성분이다.[1] 이러한 불연속적인 톤 소음은 날개통과주파수(Blade Passing Frequency, BPF)의 하모닉에서 발생하여, 날개통과주파수 소음이라 한다. 따라서 비공동 잠수함 추진기의 날개통과주파수 소음의 해석기술은 잠수함의 일반적인 운용 상태의 소음 수준을 예측하는 데 있어 필수적으로 확보되어야 하는 기술이다.
이러한 추진기의 날개통과주파수 소음예측 기법은 2000년대 들어 Seol et al.[2],[3]은 헬리콥터와 같은 공기 중의 회전기계 소음 예측에 쓰이던 Ffwocs Williams-Hawkings 방정식(FW-H 방정식)을 이용하여 수중 추진기에 적합한 형태의 식을 개발하여 비공동 소음 뿐만 아니라 얇은 층 캐비테이션까지 고려 가능한 추진기 날개통과주파수 소음예측 기법을 개발하였다. 이러한 예측기법은 유동해석을 통한 소음원 해석과 FW-H 음향상사법을 통한 소음해석을 나눈 하이브리드 방법이다.
이후 이러한 하이브리드 방법을 사용한 연구들에서는 상대적으로 저속 조건에서 상선 추진기를 대상으로 하였다. 이러한 연구들의 상선 추진기 유동해석은 선미에 위치하는 수중 추진기의 특성을 고려하기 위해, 비균일 유입류를 경계조건으로 포텐셜 유동해석과 CFD(Computational Fluid Dynamics) 유동해석을 수행하였으며, 그 결과를 시험을 통해 검증하였다.[4],[5],[6] 하지만 잠수함 추진기를 대상으로 소음 해석을 수행하고 모형시험을 통해 검증한 연구는 거의 없는 실정이다. 잠수함 추진기 형상은 상선 추진기에 비해 일반적으로 고스큐, 고비틀림각을 가지며, 고속조건에서 운용되기 때문에 이에 대한 연구가 필요하다. 이러한 잠수함 추진기에서는 비정상 하중이 상대적으로 증가할 수 있으므로, 이로 인한 효과를 충분히 고려할 수 있는 유동해석이 필요하다.
따라서 본 연구에서는 개발 동향에 따른 고속 전진 조건(9 m/s)에서의 잠수함 추진기 방사소음 예측을 위해 선체-부가물-추진기를 모두 포함하는 영역에 대한 유동 수치해석을 수행하였다. 이를 토대로 대부분의 경우 잠수함에서 가장 지배적인 소음원인 비공동 날개통과주파수 소음을 수치적으로 예측 후 그 결과를 모형시험을 통해 검증하였다.
II. 모형 시험
소음예측의 검증을 위한 모형시험은 Fig. 1과 같은 선박해양플랜트연구소(Korea Research Institute Of Ships & Ocean Engineering, KRISO)의 대형 캐비테이션 터널(Large Cavitation Tunnel, LCT)에서 수행되었다. 대상 형상은 Grove[7]에 의해 소개된 후 저항, 자항 및 국부유동에 대한 여러 수치해석과 모형시험 결과가 존재하는 DARPA Suboff AFF-8 잠수함 선체와 이탈리아 INSEAN 사에서 실제 잠수함 추진기와 유사하게 설계한 E1619 추진기[8]를 사용하였다. 대상 모델의 주요제원은 Table 1에 나타내었다.

Table 1. Dimensions of DARPA Suboff and E1619.
| Item | Dimension | |
| Length overall | Loa | 4.356 m |
| Maximum hull radius | Rmax | 0.254 m |
| Propeller diameter | PD | 0.262 m |
| Number of blades | NB | 7 |
소음계측은 추진기 하방 1 m에 플러그 타입으로 설치된 소음계측시스템에서 계측하였다. 본 소음계측시스템은 모형 잠수함 내부에 설치된 기계장치 및 터널 내부의 유동과 압력변화에 영향을 받지 않으면서 추진기에서 방사된 소음이 음향센서로 수신될 때까지 음향임피던스의 차이 없이 소음을 계측할 수 있어 추진기 소음 시험에서 신뢰할 만한 계측결과를 제공한다. 소음 신호는 샘플링 주파수 256 kHz로 계측하였으며 100 kHz까지 분석하였다.[9] 계측된 추진기 소음의 유효성을 확인하기 위하여 추진기 소음을 계측한 동일상태에서 추진기를 제외하고 더미 허브를 장착한 상태에서 배경소음을 계측하였다. 공동을 억제하기 위하여 가압하여 Table 2와 같은 유동 조건에서 시험을 수행하였다.
Table 2. LCT model test conditions.
| Flow speed (U∞) | 9.0 m/s |
| Pressure of Tunnel (p∞) | 197.0 kPa |
| Propeller rotation speed (Ω) | 30.58 rps |
| Cavitation Number (𝜎) | 6.0 |
III. 유동 수치해석 기법
선미에 위치하여 복잡한 유입류 하에서 작동하는 추진기 소음을 보다 정확하게 예측하기 위해서는 선체-부가물의 효과가 고려되어야 한다. 이러한 선체-부가물에 의한 후류가 수중 추진기 주 소음원인 추진기 표면 압력 변동에 미치는 영향을 정확히 고려하기 위하여 선체-부가물-추진기 전체영역에 대한 유동 수치해석을 수행하였다. 해석은 모형시험과 동일한 상황에 대하여 이루어졌다. LCT 터널 영역을 포함하는 도메인에 대하여 DARPA Suboff AFF-8 선체와 INSEAN E1619 추진기에 대하여 Table 2의 실험조건에 대하여 유동해석을 수행하였다.
유동 수치해석은 범용 유동해석 프로그램인 STAR-CCM+[10]를 통해 수행하였다. 비압축성 난류 유동에 대해 연속방정식과 RANS(Reynolds Averaged Navier Stockes) 방정식을 지배방정식으로 하였고, 시간 적분과 공간에 대한 수치 이산화는 2차 정확도 기법을 사용하였다.
난류 모델로는 RSM(Reynolds Stress Model)을 사용하였다. 일반적으로 RANS 해석 시 Realizable k-ε 모델(RKE)과 SST k-ω 모델(SSTKW)이 많이 사용되는데, RSM을 통한 유동 해석이 RKE와 SSTKW 두 모델을 통한 해석보다 수렴안정성이 떨어지지만, 충분한 격자계를 사용했을 때 복잡한 형상의 물체 주위의 난류 유동에 의한 국부유동 및 힘의 예측에 있어 더 좋은 정확도를 보인다.[11],[12],[13],[14] 특히 Byeon et al.[14]의 연구에서는 본 연구와 같은 해석대상인 DARPA Suboff의 저항 및 저항 해석과 INSEAN의 E1619 추진기의 단독 성능 해석에서 RSM이 더 높은 정확도를 보인다. 따라서 선체-부가물에 의한 유동 영향을 고려할 때 물체 경계층 내 난류유동 해석의 정확도가 높은 RSM을 사용하였다.
유동 수치해석은 정상 유동상태에서 MRF(Moving Reference Frame) 방법으로 충분히 수렴시킨 후 추진기 격자를 직접 회전시키는 방법으로 비정상 유동 해석을 수행하였다. 또한 소음예측의 정확성을 위하여 프로펠러 회전 0.5° 간격에 해당하는 시간 간격으로 비정상 해석을 수행하였고, 추력과 토크가 일정하게 수렴된 거동을 보이는 회전수까지 해석을 수행하였다. 충분히 수렴된 여러 바퀴의 유동 수치해석 데이터를 위해서는 큰 계산 비용이 필요하므로, 계산의 효율성을 위하여 충분히 수렴된 한 바퀴의 유동 수치해석 결과만을 추진기 소음예측에 사용하였다.
IV. 추진기 소음의 수치예측 기법
추진기 날개 통과 주파수 소음의 수치예측은 유동장내 물체의 경계층, 즉 추진기 날개 표면의 소음원 분포를 알고 있을 때, 파동방정식의 해로 써 나타낼 수 있다. Ffowcs Williams와 Hawkings는 Lighthill의 음향상사법[15]을 움직이는 물체에 대해 적용시켜 다음과 같은 지배 미분 방정식을 유도하였다.[16]
우변의 세 항이 소음 생성항으로, 각각 홀극, 이중극, 사중극 소음원이다. Eq . (1)에서 f=0는 물체의 표면을 의미하여, p′는 음압을, ρ0와 c0는 교란되지 않은 매질의 밀도와 음속을 나타낸다. vn은 물체 표면의 국부 법선 속도이며, li는 유체에 작용하는 단위 면적 당 힘이다. Tij는 Lighthill’s stress tensor로 다음과 같다.
| $$T_{ij}=\rho u_iu_j-\tau_{ij}+(p'-c_0^2\rho')\delta_{ij}.$$ | (2) |
Farassat은 FW-H 방정식에서 부피 음원항, 즉 사중극 항을 생략하고 수치적 계산이 용이하도록 변형시킨 적분형태의 식을 개발하였다.[17] 사중극 음원항은 비선형 음원으로 강한 천음속 유동에서 중요하며, 일반적으로 추진기 속도보다 매우 빠른 수중의 경우 무시할 수 있을 만큼 작다고 알려져 있다. 따라서 Farassat 1A를 통한 수중 추진기 소음의 예측은 공동이 발생하지 않는 비공동 추진기 소음 예측에 있어 보다 효율적이다. FW-H 방정식에 Green 함수와 좌표변환을 사용하고, 관찰자와 음원과의 거리가 음원의 위치 변수임을 통하여 지연시간 τ와의 함수관계를 이용하면 아래와 같은 최종해를 얻을 수 있다.
| $$p'(\overrightarrow x,\;t)=p'_T(\overrightarrow x,\;t)+p'_L(\overrightarrow x,\;t).$$ | (3) |
위 방정식에서 p′T은 두께 소음, p′L은 하중소음을 나타내며, 하첨자 r은 해당 벡터의 관찰자 방향으로의 성분을 의미한다. 또한 하첨자 ret은 이 적분이 지연시간에 대하여 계산되었음을 나타낸다. 최종해의 Eqs. (4)와 (5)에서 두 식이 질량 유량과 압력 성분으로 완전히 분리되어 있어, 각각 홀극 음원항과 이중극 음원항에 해당함을 알 수 있다. 이 결과 식은 임의의 블레이드 운동과 형상, 하중 조건에 대하여 적용 가능하다. 또한 1/r2, 1/r 항들에 의해 근접장과 원지장 효과가 나타난다.소음계산은 추진기 표면을 여러 개의 패널로 나누어 모든 패널에 의한 관찰자 위치에서의 음압을 시간에 따라 계산하였다.
V. 결과 및 검토
5.1 유동해석 결과 및 검증
유동해석은 모형시험과 동일한 조건과 상황에 대하여 수행되었다. 유동해석에 사용된 격자계의 모습은 Figs. 2와 3과 같고, 회전영역은 Polyhedral 격자를 사용하였으며, 그 외 영역은 Trimmer 격자 생성법으로 격자를 구성하였다. 사용된 총 격자수는 13.5M개 이다. y+는 소음해석에 직접적으로 영향을 주는 추진기 영역에서는 1 이하가 되도록 하였다.


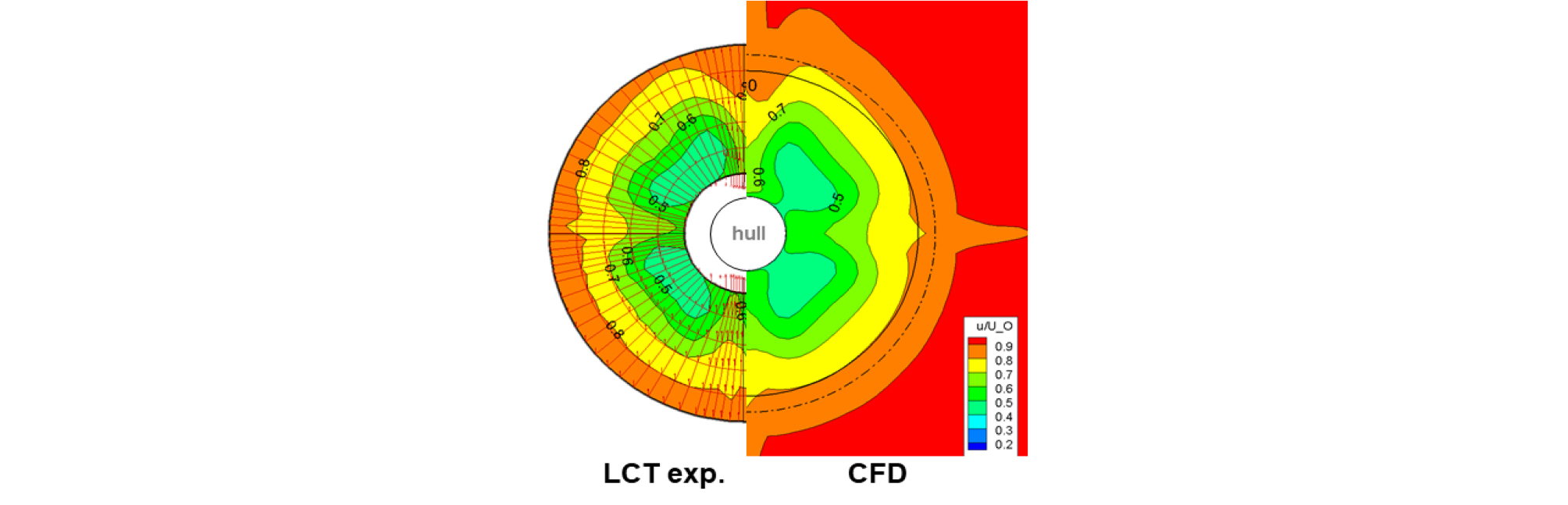
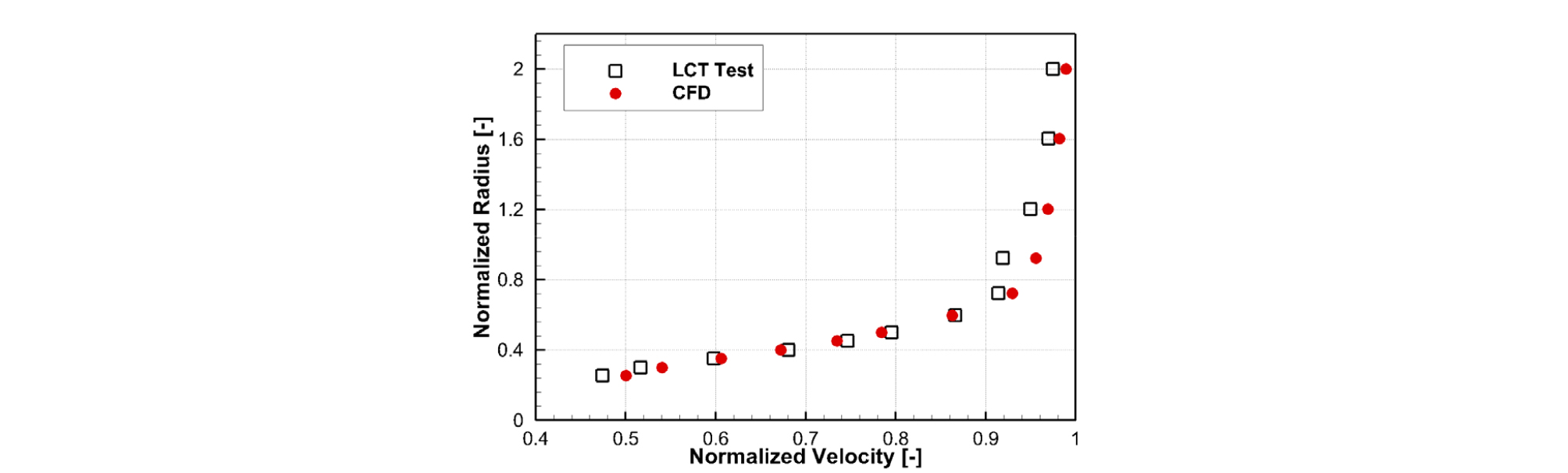
유동해석의 추진기 유입류 모사의 타당성을 검증하기 위해 추진기 없이 선체만 있는 상황에 대해 추진기 회전면의 반류장 해석 결과를 모형시험 계측결과와 함께 Fig. 4에 도시하였다. 잠수함 함교 및 선미 제어판에서 발생하는 후류의 영향에 의한 비균일 유입류가 형성되고, 이에 따라 부가물이 위치하는 곳에서 속도구배가 크게 발생함을 관찰할 수 있다. 선미 제어판에 의한 반지름 방향으로의 속도구배가 유동해석 결과에서 모형시험 계측결과보다 작게 예측 되었지만, 전반적인 유동과 추진기 소음에 주요한 역할을 하는 국부유동의 각방향으로의 속도성분은 만족스러운 정확도로 예측되었다. 이러한 반류장 결과를 반지름 방향으로 속도를 평균하고, 추진기 반경과 자유류 속도로 정규화하여 Fig. 5에 도시하였다. Fig. 5에서 계측과 해석 결과는 정규화된 반경이 약 0.8 ~ 1.2인 구간에서 차이를 보인다. 따라서 추진기 영역인 정규화된 반경이 0 ~ 1인 구간에선 대부분 영역에서 높은 정확도로 유동을 모사하고 있으나, 날개 끝 영역에 시험보다 높은 정상 하중이 작용하고 있음을 알 수 있다. 하지만 추진기 소음에는 비정상 하중의 영향이 지배적이므로 이러한 반지름 방향 속도 구배의 영향은 적을 것으로 판단된다.
E1619 추진기를 장착한 DARPA Suboff 잠수함의 9 m/s 선속에서의 자항 해석 결과는 Table 3과 같다. 추력일치법 통하여 추력과 선속을 일치시킨 상태에서 추진기 주변 유동의 레이놀즈수를 모형시험과 최대한 가깝게 하기 위해 추진기 회전속도(Ω)를 모형시험과 일치시켰다.
Table 3. Self-propulsion solution.
| Model test | CFD (% D) | |
| KT | 0.2618 | |
| 10KQ | 0.4603 | 0.4849 (5.34 %) |
| Ω | 30.582 | 30.61 (0.09 %) |
5.2 추진기 소음 수치예측 결과 및 검증
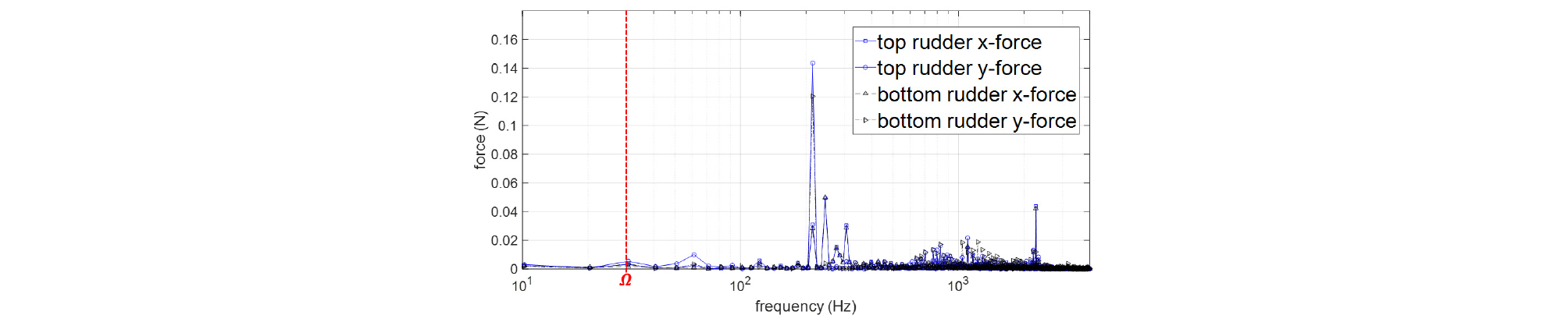
비정상적인 효과를 고려하기 위하여 선체-부가물-추진기를 모두 포함하는 영역에 대하여 수행된 유동해석은 상대적으로 계산 비용이 크다. 이러한 비정상적인 효과는 함교와 선미 제어판에 의한 것이 지배적이다. 따라서 이러한 효과들을 충분히 고려하며 효율적으로 추진기 소음 수치예측을 하기 위하여, 소음해석을 위한 유동해석보다 성긴 격자계에서 3바퀴 회전 동안 선미 제어판에 작용하는 힘의 주파수 성분을 확인하였다. Fig. 6에서 보이듯이 선미 제어판에 작용하는 힘의 주파수 성분은 추진기 회전주파수보다 작은 주파수 성분은 거의 존재하지 않는다. 따라서 추진기 회전 한 주기 동안의 유동해석 결과에서 부가물에 의한 비정상적인 효과를 대부분 고려할 수 있다. 따라서 준정상류 가정을 통해 추진기 회전 한 주기 동안의 유동해석 결과를 통해 소음예측을 하는 것이 효율적이다.
수음점에서의 시간에 따른 음압의 시간 변화와 각 소음원의 소음 스펙트럼은 Fig. 7에 나타내었다. 나타낸 음압은 추진기 회전주기의 1/7의 시간 동안의 예측 결과로, 지속적으로 이러한 음압 변화가 반복해서 나타나는 경향을 보인다. 이러한 음압의 시간 변화와 소음 스펙트럼에서 추진기 1차 날개통과주파수 성분이 지배적인 것을 확인할 수 있다.
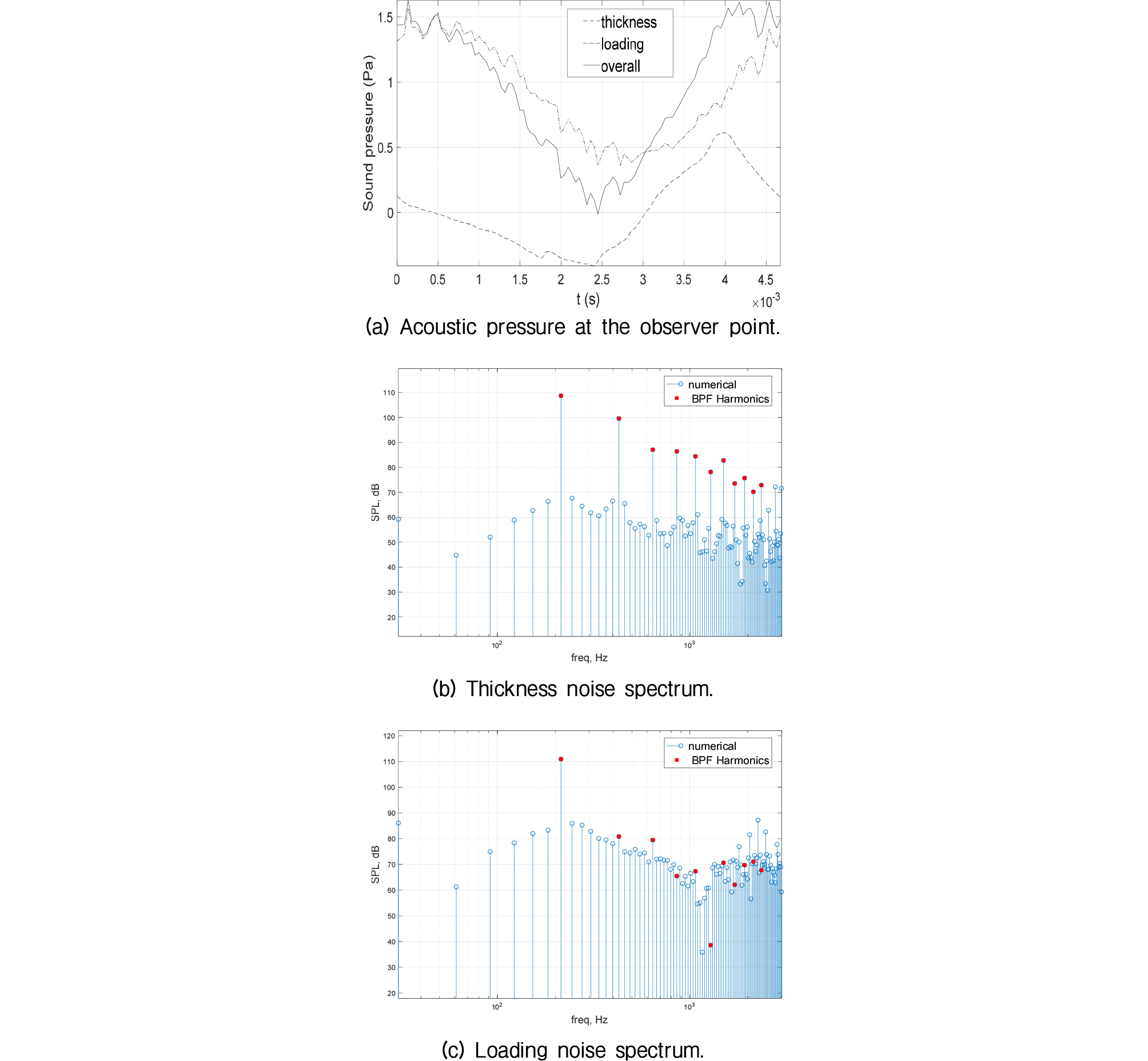
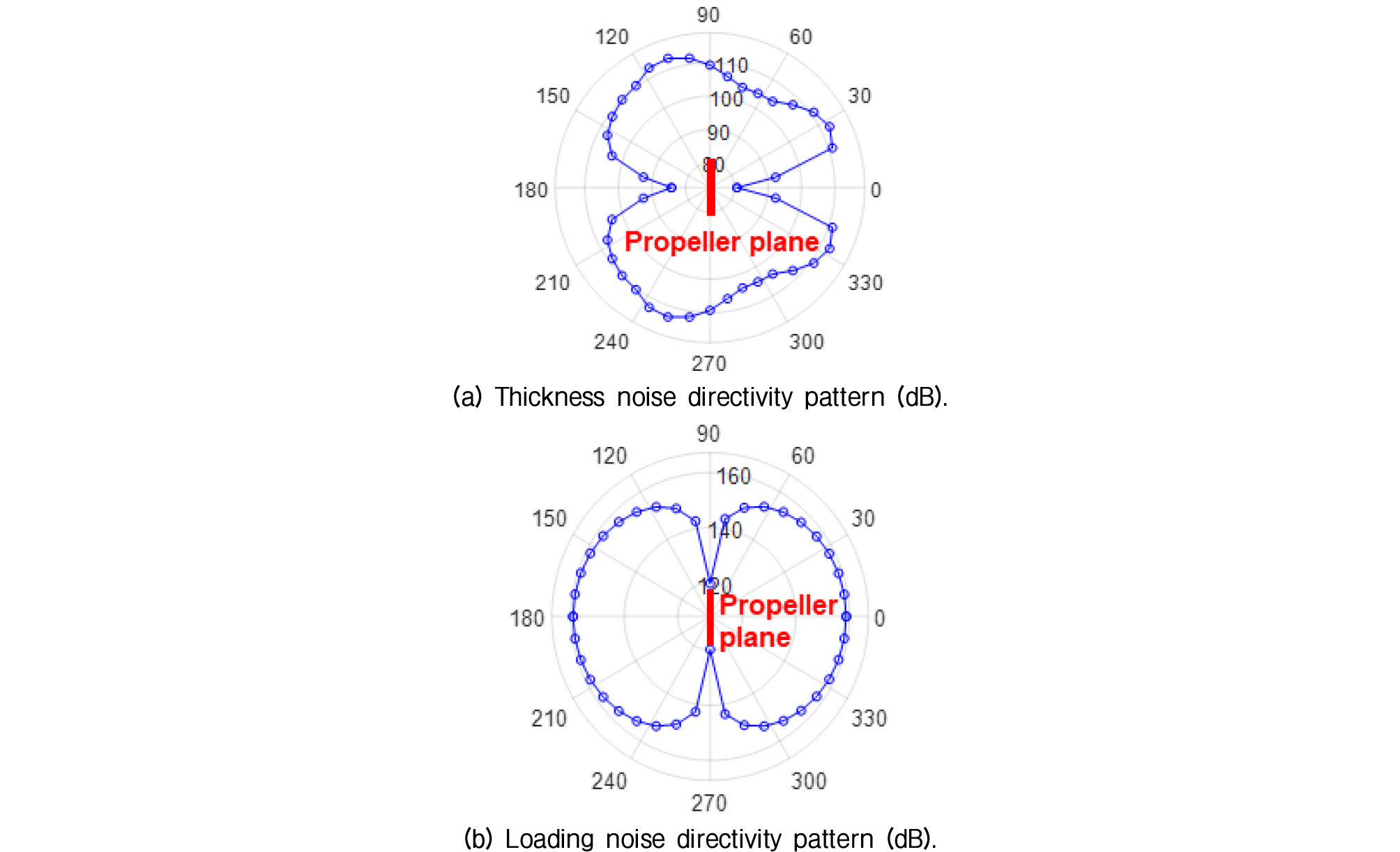
Fig. 8은 두께소음과 하중소음의 방향성 패턴에 대한 수치해석 결과이다. 방향성 패턴은 추진기 직경의 약 4배가 되는 지점에서 해석되었다. 두께소음은 대체로 추진기 회전에 의한 유체의 체적 변화가 가장 심한 추진기 회전면 방향의 지향성을 가지나, 잠수함 추진기의 높은 비틀림각에 의해 앞쪽으로 치우쳐진 지향성을 가진다. 하중소음은 블레이드 표면의 압력 섭동에 의해 추진기 회전면에 수직한 회전면 방향으로 소음이 전파되며, 두께소음보다 훨씬 높은 소음 수준을 보인다. 모형시험에서 소음계측이 이루어진 추진기 직하방의 수음점은 추진기 회전면에 위치하여 하중소음이 가장 약한 방향으로 Fig. 7(c)에서 보이듯이 1차 날개통과주파수를 제외한 날개통과주파수의 Harmonic 성분은 두드러지지 않음을 볼 수 있다. 하지만 이러한 방향성에도 불구하고 수음점에서 하중소음이 두께소음에 비해 높은 소음수준을 가져 하중소음이 고속 비공동 추진기의 지배적인 소음원임을 수치적으로 확인하였다.
모형시험 계측결과와 수치예측 결과의 비교 이전에, 모형시험 계측결과가 배경소음과 큰 차이를 보이지 않기 때문에 배경소음 보정이 필요하였다. 배경소음보정은 다음의 Eq. (6)을 통해 수행하였다.
| $$L_{\mathrm{total}-\mathrm{background}}=20\log_{10}(10^{L_{\mathrm{total}}/20}-10^{L_{\mathrm{background}}/20}).$$ | (6) |
배경소음 보정된 모형시험 계측결과와 수치예측 결과는 Fig. 9에 나타내었다. 전체적인 소음 스펙트럼의 경향성은 두 결과가 부합하는 모습을 보인다. 추진기 1차 날개통과주파수에서 계측과 수치예측이 약 3.34 dB 차이로 좋은 일치를 보여주고 있다. 하지만 수치예측과 계측 간의 오차는 2차 날개통과주파수에서는 약 9 dB, 고차 날개통과주파수에선 그와 비슷하거나 더 큰 경향을 보인다. 이는 계측결과에서 날개통과주파수의 하모닉 뿐만이 아니라 추진기 회전주파수의 하모닉에서 피크가 발생함을 고려해 볼 때, 추진기 표면에 가해지는 하중으로 인해 발생하는 진동소음이 모든 주파수 영역에서 추진기 소음보다 소음 수준이 높기 때문에 발생하는 오차로 보인다. 따라서 모형시험에서 계측된 추진기 소음은 1차 날개통과주파수에서는 진동소음보다 지배적인 소음원이기 때문에 비교적 정확한 예측이 가능했지만, 2차 이상의 고차 날개통과주파수에서는 진동소음보다 낮은 소음 레벨을 가져 추진기 소음 수치예측 결과와 직접적인 비교가 어렵다.
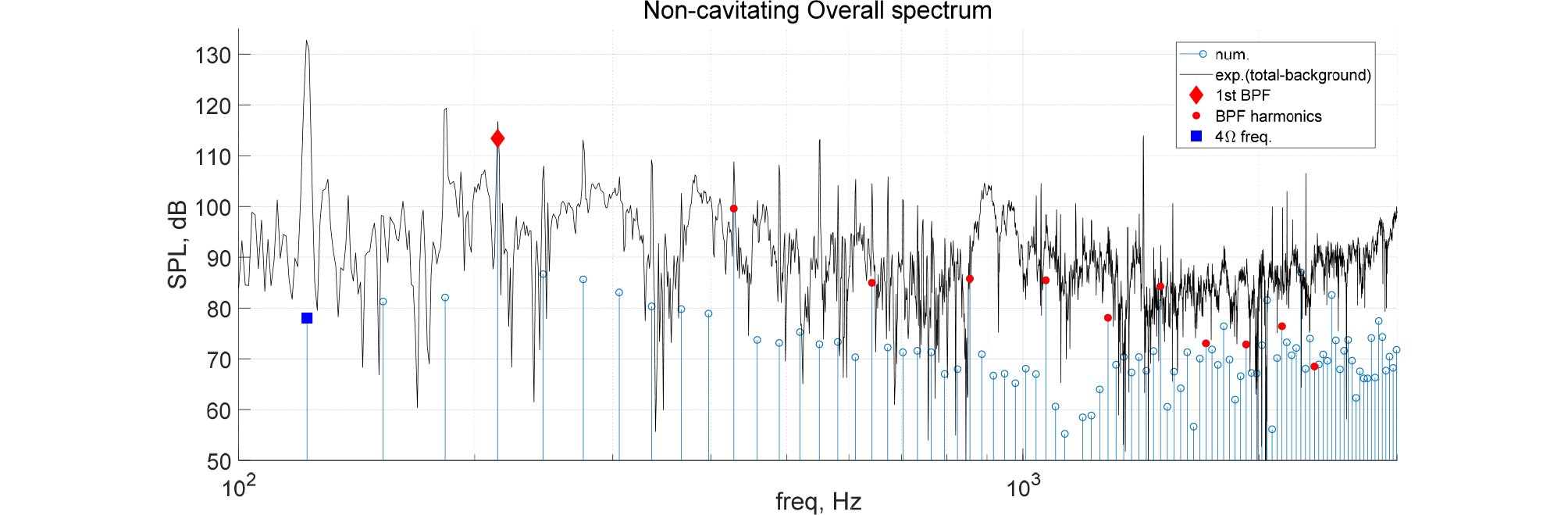
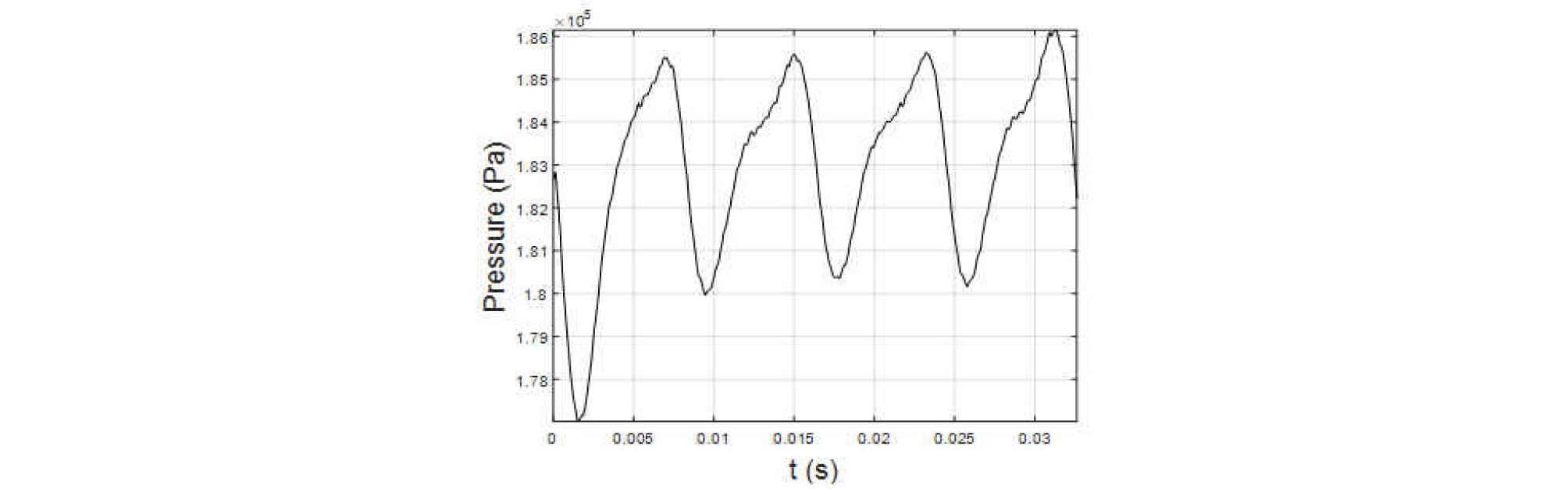
Fig. 10에서 나타내고 있는 추진기 표면 임의의 점에서 압력의 시간 변화에서 표면 하중의 주요한 주파수 성분은 추진기 회전주파수의 4배가 되는 주파수(4 Ω)임을 알 수 있다. 이러한 4 Ω 성분은 앞서 유동해석 결과의 반류장에서 확인할 수 있는 부가물에 의한 비균일 유입류의 영향을 받는다. 이러한 4 Ω 성분은 계측결과에서 가장 지배적인 주파수 성분인 데 반해 소음예측 결과에선 그 수준이 매우 낮게 예측된다. 이는 표면 하중에 의해 발생하는 진동소음에 4Ω 주파수 성분이 직접적인 가진원이기 때문이며, 이에 따라 진동소음의 4 Ω 성분이 매우 크게 발생한다. 또한 유동해석에 의해 예측된 반류장은 실제 모형시험보다 각방향으로 속도구배가 적어, 이로 인한 표면 하중 변화의 진폭이 작게 예측되었다고 판단된다.
VI. 결 론
본 연구에서는 선체-부가물의 비정상 유입류 효과를 고려할 수 있는 유동해석을 통해 고속 전진 조건의 잠수함 추진기에서 방사되는 비공동 날개통과주파수 소음을 수치적으로 예측하고 모형시험을 통하여 검증하였다.
선체-부가물에 의한 비정상, 비균일 유입류를 고려하기 위하여 잠수함 선체와 추진기가 모두 존재하는 형상에 대하여 유동 수치해석을 수행하였다. 이 유동해석 결과에 대해 Farassat에 의해 제안된 변형된 FW-H 방정식을 이용하여 비공동 추진기의 날개통과주파수 소음을 수치적으로 예측하였다.
수치적 소음예측은 LCT 모형시험과 양호한 경향성의 일치를 보였다. 특히 비공동 추진기 소음 중에 가장 큰 소음을 방사하며, 다른 소음원보다 추진기 소음이 지배적인 1차 날개통과주파수에서 모형시험 계측결과와 좋은 일치를 보였다. 모형시험의 계측결과는 추진기 표면 하중에 의한 진동소음이 1차 날개통과주파수를 제외한 전 주파수 영역에 대하여 추진기 소음과 비슷하거나, 그보다 큰 소음 수준을 보였다. 따라서 진동소음에 의한 오차 때문에 모형시험과의 비교를 통한 여러 주파수 대역에서의 수치적 소음예측의 정확도를 검증하기에는 무리가 있었다.
또한 선체-부가물의 유입류의 비정상 효과는 표면 압력에 영향을 주어 하중소음에 지배적인 영향을 미칠 것으로 예상되는데, 이로 인해 추진기 표면 압력변화에 4 Ω 주파수 성분이 두드러짐을 확인하였으나, 소음해석 결과의 검증은 하중소음이 가장 약한 추진기 회전면에서 이루어지는 등 실험적인 한계에 의해 이로 인한 방사소음에의 영향을 직접적으로 확인하지 못하였다. 하지만 추진기 회전면에 위치하는 수음점에서의 전체적인 소음 스팩트럼의 경향성과 1차 날개통과주파수 소음이 소음예측과 계측결과에서 진동소음에 의한 오차를 감안하였을 때 이전의 연구들에 비해 좋은 예측 정확도를 보임에 따라, 선체-부가물-추진기 전체영역에 대한 유동해석을 통한 소음해석이 비정상 하중이 상대적으로 강한 고속조건의 잠수함 추진기에서 저주파 대역의 소음을 예측, 분석함에 있어 유용함을 확인하였다.
본 연구에서는 비공동 소음만을 다루었지만, 선체-부가물에 의한 영향을 고려한 추진기 날개통과주파수 소음예측은 유동해석 결과에 민감하며 진동소음 등 다른 소음원보다 높은 소음 수준을 보이는 공동 소음의 저주파 대역 예측에 있어 정확도 향상에 더욱 기여할 수 있을 것으로 보인다. 따라서 이를 토대로 향후 얇은 층 캐비테이션을 고려한 공동 상태 잠수함 추진기 소음예측에 관한 연구를 수행할 예정이다.
