

I. 서 론
II. 수중 음향 채널파라미터 산출 기법
2.1 상관 시간 산출 기법(Coherence Time Estimation Method)
2.2 상관 대역폭 산출 기법(Coherence Bandwidth Estimation Method)
III. 수중 음향 채널 실측
3.1 호수 실험 환경
3.2 상관 시간 산출
3.3 상관 대역폭 산출
3.4 프레임 구성에 따른 성능 분석
IV. 결 론
I. 서 론
해양에서의 해양 데이터 수집, 해양 오염 모니터링, 해양 탐사 및 전술 감시를 위해서는 수중 기지국과 수중 센서 간의 상호 통신이 필수적이다.[1] 해양에서의 원활한 수중음향통신을 가능하게 하도록 해양 채널에 관한 연구는 활발히 진행되고 있다. 해양에서의 수중음향통신을 위해 동해와 서해상에서의 수중 채널 분석에 필요한 최대 지연시간, RMS(Root Mean Square) 지연 확산, 최대 도플러 주파수, 상관 시간, 상관 대역폭에 대한 분석이 앞선 연구에서 이루어졌다.[2] 그러나 호수나 강에서의 환경 감시, 오염 모니터링의 필요성 역시 대두되었지만, 호수나 강에서의 채널 정보에 관한 연구는 아직 미흡하다.
본 논문에서는 호수에서의 수중 채널 분석을 위해 경북 문경시에 있는 경천호에서 실험을 진행하였다. 송신기에서 신호를 전송할 때 거리와 시간을 측정하고 측정 결과를 이용하여 최대 도플러 주파수를 추정한다. 그리고 수신 신호의 도플러 전력 스펙트럼을 이용하여 추정한 최대 도플러 주파수를 비교하고 이에 따른 상관 시간을 추정한다. 그리고 수신 데이터를 이용하여 최대 지연시간과 RMS 지연 확산 추정한 후 상관 대역폭을 산출한다. 산출된 상관 시간과 상관 대역폭을 기준으로 송신 신호의 프레임을 구성한 후 프레임 내 파일럿 신호 간의 간격에 따라 비트 오류율을 비교 분석한다.
본 논문의 구성은 다음과 같다. 제2장에서는 상관 시간과 상관 대역폭을 추정하는 기법에 관해 설명하고 제3장에서는 경천호 실험 환경에 관해 설명하고, 두 가지 기법을 이용하여 산출한 최대 도플러 주파수를 비교 분석하고 상관 시간을 산출한다. 그리고 채널 지연시간과 RMS 지연 확산과 상관 대역폭을 산출한다. 상관 시간과 상관 대역폭을 이용하여 파일럿 신호 간의 최대 간격을 얻고 그에 따른 비트오류율을 분석한다. 마지막으로 제4장에서 결론을 맺는다.
II. 수중 음향 채널파라미터 산출 기법
수중 음향 채널의 특성을 이해하기 위해서는 최대 도플러 주파수에 따른 상관 시간과 RMS 지연 확산에 따른 상관 대역폭을 산출해야 한다.
2.1 상관 시간 산출 기법(Coherence Time Estimation Method)
상관 시간은 시간상으로 균일한 특성을 보이는 채널 시간 구간이다. 따라서 특정 상관 시간 동안 채널 임펄스 응답은 변하지 않는다. 상관 시간은 최대 도플러 주파수와 서로 상관이 있으므로 정현파에 대한 시변 채널의 자기상관도가 0.5 이상으로 유지되는 시간 구간을 상관 시간으로 정의할 때 상관 시간과 최대 도플러 주파수 간의 관계는 Eq. (1)과 같다.[3]
| $$T_0\approx\sqrt{\frac9{16\pi f_d^2}}=\frac{0.423}{f_d},$$ | (1) |
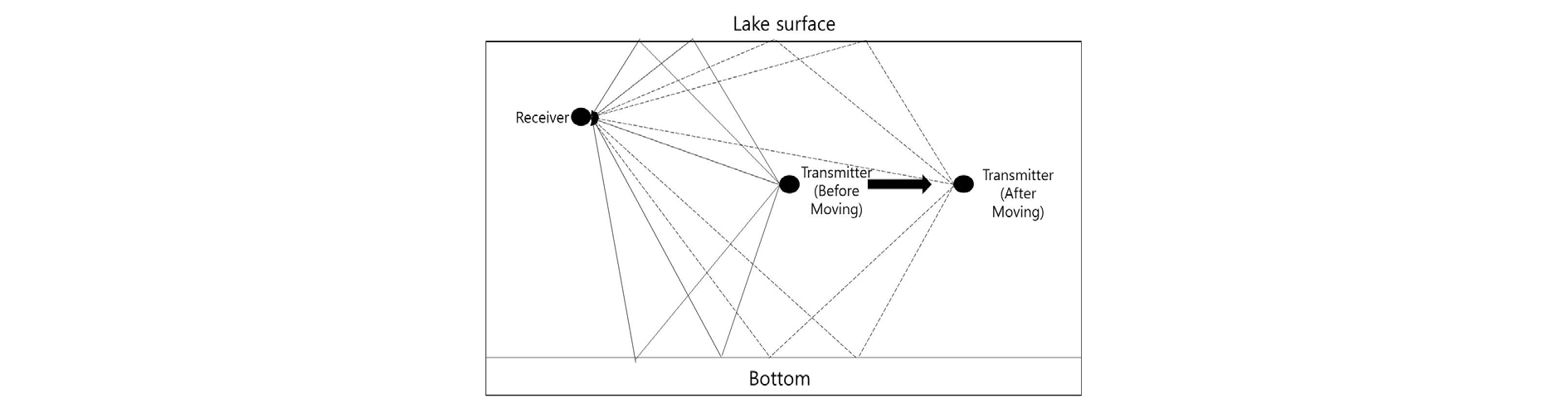
여기서 는 상관 시간이고, 는 최대 도플러 주파수이다. 따라서 수중 음향 채널에서의 상관 시간을 추정하기 위해서는 최대 도플러 주파수를 먼저 추정해야 한다. Fig. 1에 나타나 있는 것과 같이 수중 음향 채널 환경에서의 도플러 주파수는 수면의 움직임과 송수신기의 이동 등에 의해서 발생한다.
본 논문에서는 최대 도플러 주파수 추정의 정확성을 높이기 위해 최대 도플러 주파수를 추정하는 두 개의 기법을 이용하여 최대 도플러 주파수를 추정한 후 두 개의 기법들의 결괏값을 비교한다.
첫 번째 기법은 실험을 진행하면서 실험 신호를 전송할 때 측정된 시간과 송신단과 수신단 사이의 변위를 이용하여 속력을 추정한 후 Eq. (2)를 이용하여 최대 도플러 주파수를 추정한다.[3]
| $$f_d=\frac{vf_c}c,$$ | (2) |
여기서 는 송수신 노드 간의 상대 속도이고, 는 반송파 주파수이다. 그리고 c는 음파 속도이며, 본 논문에서는 1500 m/s으로 가정했다.
두 번째 기법은 수신된 신호로부터 추정된 채널을 이용하여 도플러 전력 스펙트럼을 구한 뒤 전력 스펙트럼의 주파수 퍼짐 값의 RMS 값을 구해 도플러 주파수를 추정한다. 수신 신호의 시간 t에서 추정한 의 지연 프로파일(delay profile)을 갖는 시변 채널을 라 하면 도플러 전력 스펙트럼은 의 자기 상관 함수의 푸리에 변환을 통해 구할 수 있다.
| $$A_h(\tau,\triangle t)=E\lbrack h^\ast(\tau,t)\;h^\ast(\tau,t+\triangle t)\rbrack,$$ | (3) |
| $$S_C(\tau,\triangle f)=\int_{-\infty}^\infty{A_h(\tau,\triangle t)e^{(-j2\pi f\triangle t)}}d\triangle t,$$ | (4) |
Eq. (3)에서 는 추정된 시변 채널의 자기 상관 함수를 나타내고 Eq. (4)의 는 Eq. (3)의 푸리에 변환을 통해 구해진 도플러 전력 스펙트럼을 나타낸다. Eq. (4)에서 주파수 퍼짐의 RMS 값을 통해 도플러 확산을 구할 수 있다.[4,5] 도플러 전력 스펙트럼의 평균값은 다음과 같다.
| $$\overline f=\frac{\int_{-f_{max}}^{f_{max}}\triangle fS_c(\tau,\triangle f)d\triangle f}{\int_{-f_{max}}^{f_{max}}S_c(\tau,\triangle f)d\triangle f},$$ | (5) |
여기서 는 주파수 퍼짐의 최댓값이고 Eq. (5)의 도플러 전력 스펙트럼의 평균값을 이용하여 RMS 도플러 확산은 Eq. (6)과 같이 나타낼 수 있다.
| $$f_s=\sqrt{\frac{\int_{-f_{max}}^{f_{max}}(\triangle f-\overline f)^2S_c(\tau,\triangle f)d\triangle f}{\int_{-f_{max}}^{f_{max}}S_c(\tau,\triangle f)d\triangle f}},$$ | (6) |
따라서 Eq. (6)을 이용하여 추정된 는 와 같으므로 이용하여 Eq. (6)의 를 Eq. (1)에 대입하여 상관 시간을 추정할 수 있다.
2.2 상관 대역폭 산출 기법(Coherence Bandwidth Estimation Method)
상관 대역폭은 주파수 상에서 균일한 특성을 보이는 채널 대역폭이며 채널 주파수 응답이 균등 이득 및 선형 위상 특성을 갖는다. 상관 대역폭은 RMS지연 확산과 서로 상관이 있다. 상관 대역폭과 RMS 지연 확산 간의 관계는 Eq. (7)과 같이 나타낼 수 있다.[3]
| $$B_c\approx\frac1{5\tau_{rms}},$$ | (7) |
Eq. (7)에서 는 상관 대역폭이고, 는 RMS 지연 확산을 나타낸다.
RMS 지연 확산은 지연 프로파일과 밀접한 관련이 있다. 지연 프로파일을 추정하기 위해서는 일련의 과정이 필요하다. 먼저 송신기에서 정현파 신호 를 송신하고 수중채널를 통과하여 수신기에 도착하는 시간 영역의 신호 Eq. (8)은 주파수 영역의 식을 역푸리에 변환을 해서 얻을 수 있다.
| $$y(t)=\int H(\tau,f)X(f)e^{-iwtf}df,$$ | (8) |
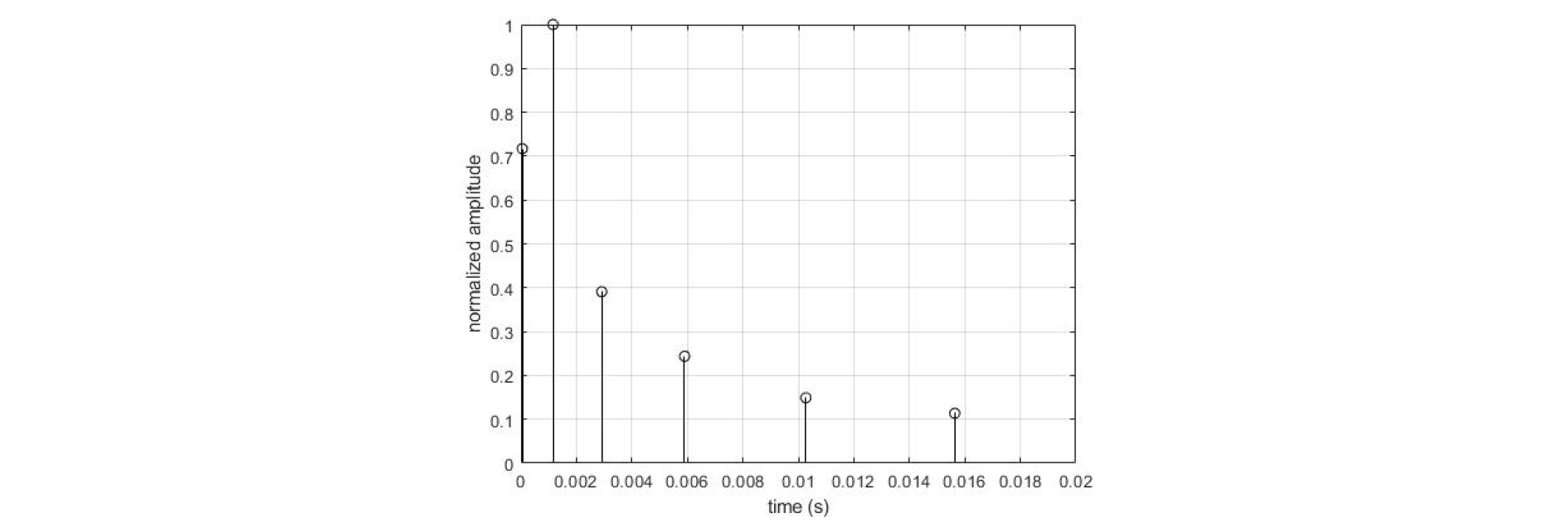
여기서 는 정현파 신호 의 주파수 표현이고 는 시변 채널 의 주파수 표현이다. 는 수중 채널의 다중 경로를 포함할 때 다중경로 전파에 의한 시간 지연을 갖는 신호 성분들을 갖게 된다. 따라서 고유음선 (eigen ray) 경로 관점에서 분석했을 때 송신 신호 가 이상적인 임펄스 값이라면 수신 신호는 Fig. 2와 같이 지연 프로파일(delay profile)을 갖는 형태를 나타낸다. Fig. 2에서 알 수 있듯이 수신 신호는 각각의 다른 지연 시간과 다른 크기를 갖는 지연 프로파일로 구성된 것을 알 수 있다.[6]
지연 프로파일 중에서 시변 채널 의 파워 지연 프로파일과 지연시간의 평균은 Eqs. (9)와 (10)과 같이 나타낸다.
| $$P(\tau)=E\lbrack\vert h(\tau,t)\vert^2\rbrack,$$ | (9) |
| $$\overline\tau=\frac{\int_0^\infty\tau P(\tau)d\tau}{\int_0^\infty P(\tau)d\tau},$$ | (10) |
결론적으로 RMS 지연 확산은 지연시간의 평균값 와 파워 지연 프로파일 를 이용하여 Eq. (11)과 같이 나타낼 수 있다.
| $$\tau_{rms}=\sqrt{\frac{\int_0^\infty(\tau-\overline\tau)^2P(\tau)d\tau}{\int_0^\infty P(\tau)d\tau}},$$ | (11) |
따라서 Eq. (11)을 이용하여 추정된 를 이용하여 Eq. (7)을 통해 상관 대역폭을 추정할 수 있다.
III. 수중 음향 채널 실측
3.1 호수 실험 환경
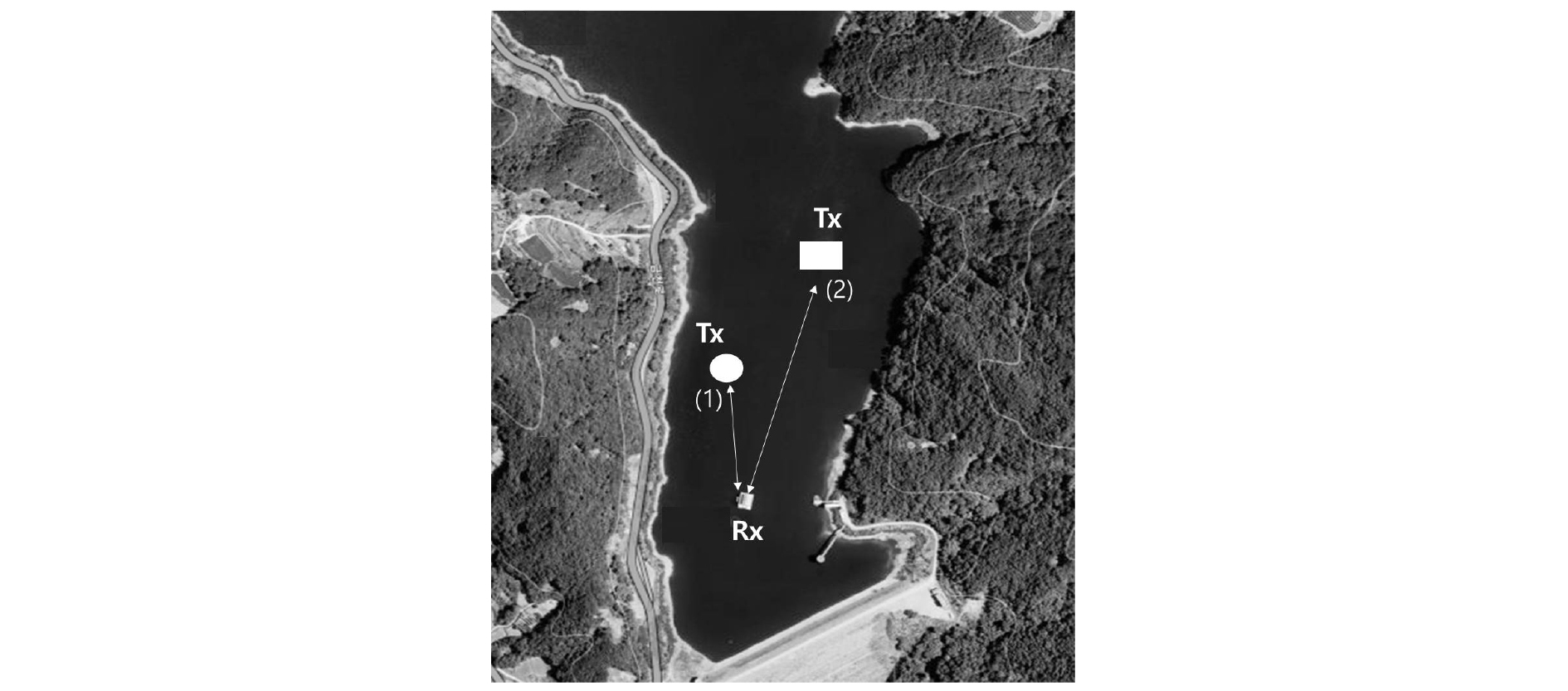
호수에서의 상관 시간과 상관 대역폭을 산출하여 채널 분석을 하기 위하여 경상북도 문경시에 있는 경천호에서 실험을 진행하였다. 실험 모식도는 Fig. 3에 나타내었고 실제 지형은 Fig. 4에 나타내었다. 실험은 경천호에서 수심이 37.6 m에 있는 곳에서 진행하였다. 송신기는 해수면으로부터 5 m 아래에 위치하였고, 수신기는 해수면으로부터 30 m 아래의 단일 채널로 구성되어 있다.
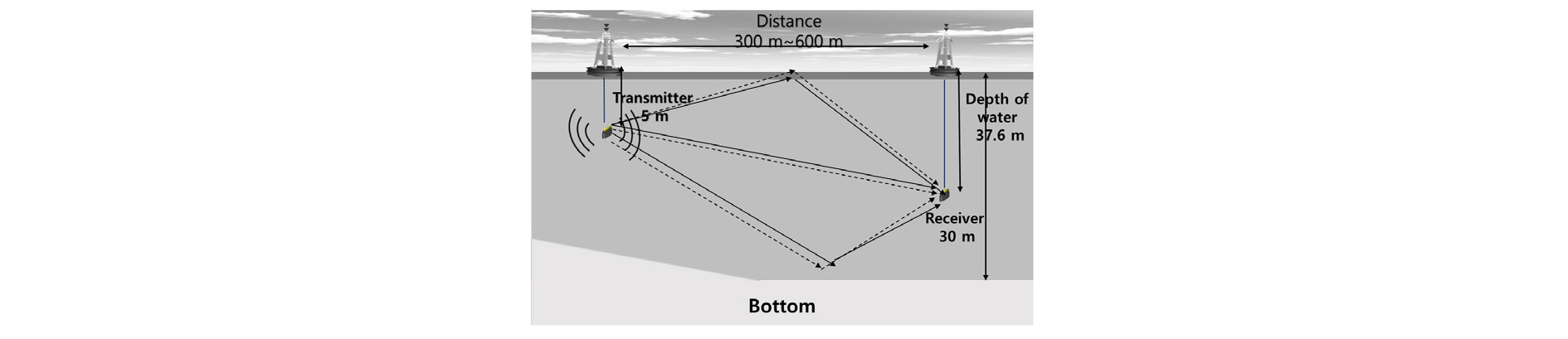
Fig. 4에서의 (1)과 (2)는 실험 중에 송신단의 진행 방향을 의미한다. 정확한 채널 정보를 추정하기 위해서는 다양한 장소에서의 측정이 필요하다. 그래서 첫 번째 실험에서는 (1)에 송신단을 위치하였고 바람의 영향으로 300 m에서 400 m까지 이동했다. 두 번째 실험에서는 (2)에 송신단을 위치하였고 바람의 영향으로 송신단이 500 m에서 600 m까지 이동했다. 각각의 실험에서 추정된 SNR(Signal to Noise Ratio) 값은 실험 1에서는 약 18 dB 정도에 형성되어있고 실험 2에서는 약 15 dB 정도에 형성되어있는 것을 알 수 있다. Fig. 4에서 확인할 수 있듯이 송신단과 수신단 사이의 호수의 폭이 넓지 않기 때문에 호수의 수면과 바닥에 반사되어 수신되는 신호뿐만 아니라 호수의 옆면에 반사되어 수신되는 신호의 영향도 고려할 필요가 있다.
실험에 사용된 신호는 채널 추정을 위한 chirp 신호와 비트오류율을 산출하기 위한 BPSK(Binary Phase Shift Keying)로 변조된 랜덤 시퀀스 신호이고 chirp 신호와 BPSK 신호는 1 s 동안 4800개의 비트를 포함하는 하나의 프레임을 전송하였고 실험 중 통신 프레임은 총 126회 전송하였다. 실험에 관련된 다른 파라미터들은 Table 1에 나타내었다.
Table 1. Experiment parameter.
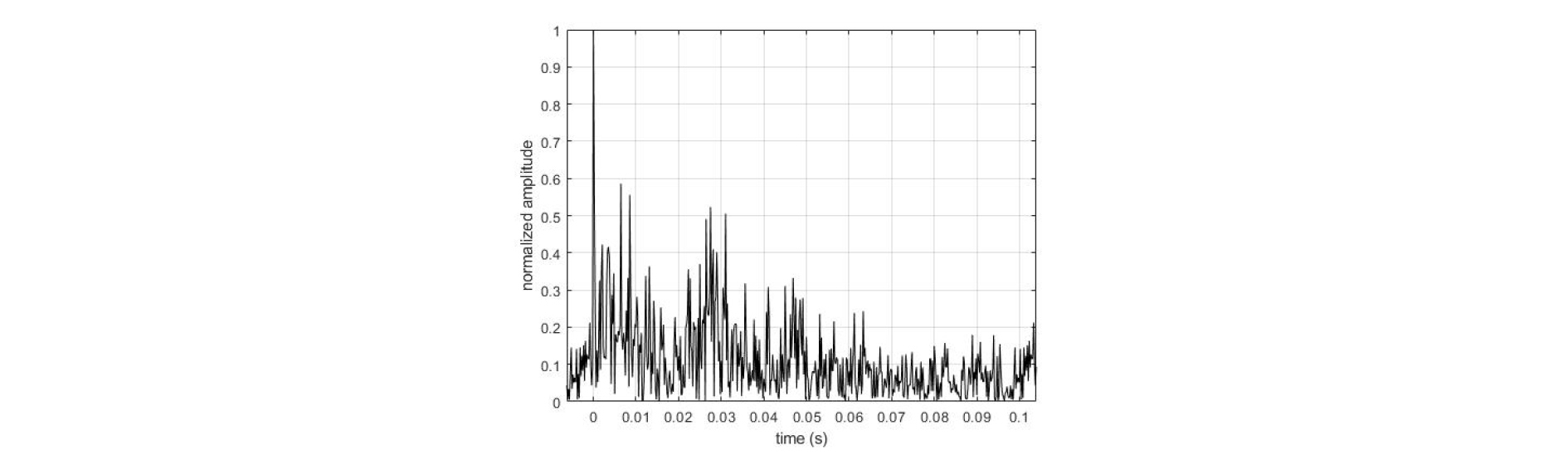
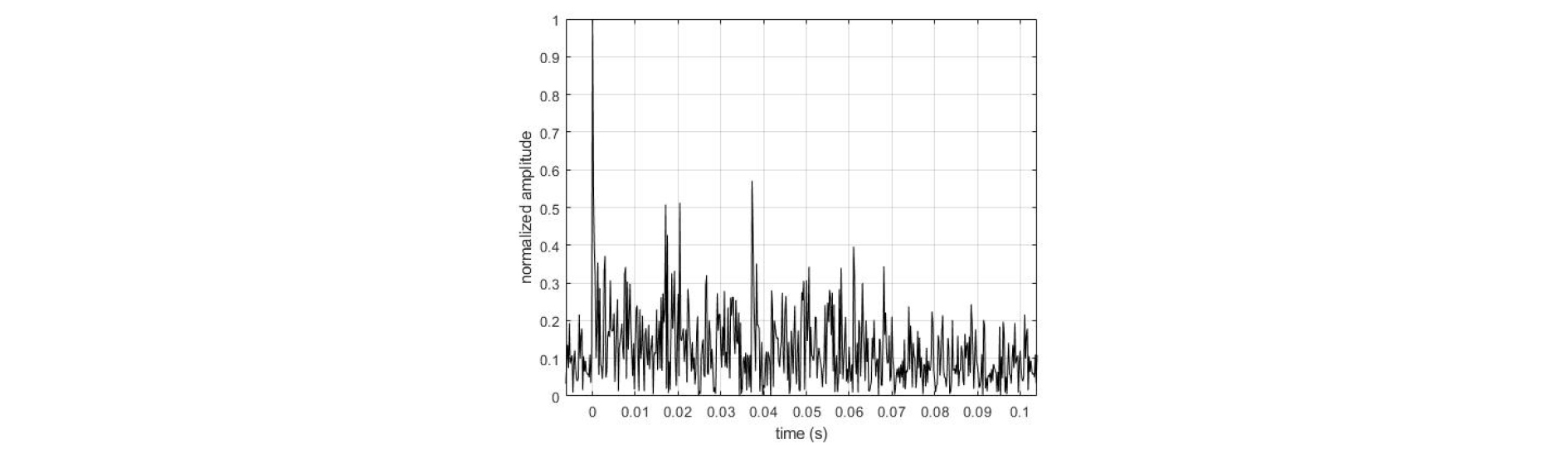
Table 1에서의 는 반송파 주파수이고, 는 샘플링 레이트이다. chirp 신호를 이용하여 추정한 경천호 수중 채널 응답의 예는 Figs. 5와 6과 같이 나타내었다.
Fig. 5는 실험 1일 때의 수중 채널 응답의 예이고 Fig. 6은 실험 2에서의 수중 채널 응답의 예이다. Figs. 5와 6을 보면 실험 1에서의 경우보다 실험 2에서의 지연시간이 더 길다. 따라서 실험 2에서 통신 신호가 채널에 의한 영향을 더 많이 받음을 알 수 있다.
3.2 상관 시간 산출
본 절에서는 최대 도플러 주파수를 구하는 두 가지의 방법을 이용하여 추정하고 비교한 후 최대 도플러 주파수 값을 이용하여 상관 시간을 산출하였다. Table 2에 두 가지 기법으로 추정한 최대 도플러 주파수와 그에 따른 상관 시간을 나타내었다.
Table 2. Maximum Doppler frequency and coherence time according to experiment.
| Experiment 1 | Experiment 2 | |
| Distance | 300 m ~ 400 m | 500 m ~ 600 m |
| Velocity | 0.23 m/s | 0.11 m/s |
| by Eq. (2) | 2.48 Hz | 1.24 Hz |
| by Eq. (10) | 2.40 Hz | 1.20 Hz |
| Relative error | 3.2 % | 3.2 % |
| 0.175 s | 0.34 s |
Table 2에서의 결괏값은 추정의 오차가 존재하기 때문에 해당 구간에서의 결괏값의 평균값을 이용하였다. Table 2를 보면 실험1에서 Eq. (2)를 이용하여 산출한 최대 도플러 주파수는 2.48 Hz이다. 실험 2에서 Eq. (2)를 이용하여 산출한 최대 도플러 주파수는 1.24 Hz이다. Eq. (10)을 이용하여 산출한 최대 도플러 주파수는 실험 1에서 2.40 Hz이고, 실험 2에서는 1.20 Hz이다. Eq. (2)를 이용하여 산출한 최대 도플러 주파수와 Eq. (10)을 이용하여 산출한 최대 도플러 주파수의 상대오차는 실험 1과 실험 2에서 각각 3.2 %인 것을 알 수 있다. 각각 산출한 최대 도플러 주파수를 이용하여 산출한 상관 시간의 평균값은 실험 1에서 0.175 s이고, 실험 2에서 0.34 s이다. 실험 결과에서 두 기법을 통해 추정한 최대 도플러 주파수가 작은 오차를 갖는 것을 알 수 있었다. 이를 통해 상관 시간을 통해 채널 추정의 오류를 줄이기 위한 전송 신호의 프레임 내에서의 파일럿 신호 간의 간격을 추정할 수 있다.[2]
3.3 상관 대역폭 산출
본 절에서는 상관 대역폭을 추정하기 위하여 수중 채널의 응답을 이용하여 RMS 지연 확산을 산출한다. 산출한 거리에 따른 RMS 지연 확산 분포도는 Fig. 7과 같다.
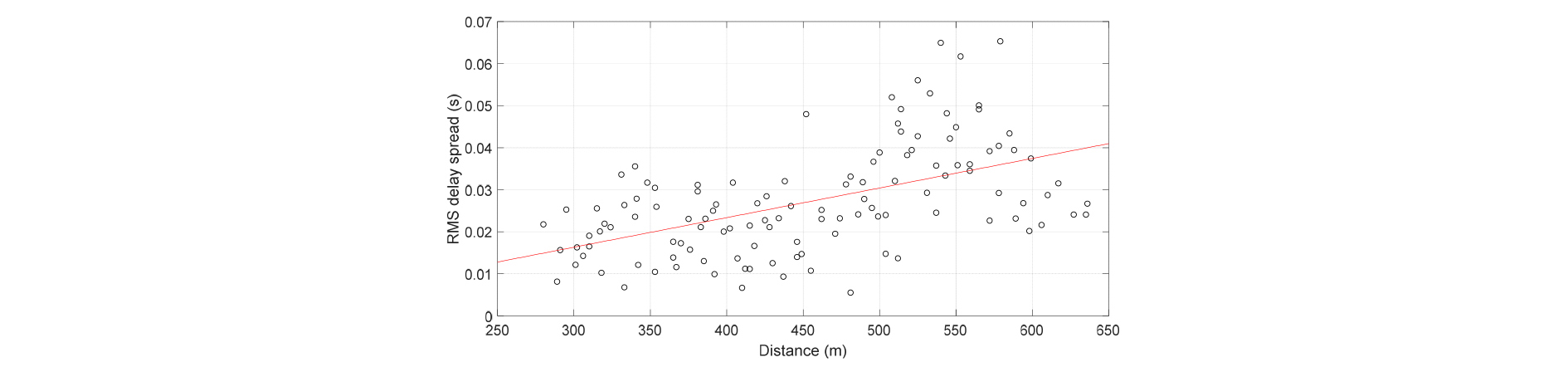
RMS 지연 확산에 영향을 주는 요인들은 수온, 바닥의 재질, 수심 그리고 거리 등이 있지만 본 논문에서는 거리에 따른 영향만 고려한다.[1] Fig. 7에서 거리가 멀어질수록 RMS 지연 확산 값이 증가하는 것을 알 수 있다. 실험 1과 실험 2에서의 최대 지연시간, 는 채널의 다중 경로 중 최댓값으로부터 6 dB보다 작은 채널 이득을 갖는 마지막 경로에서의 지연시간을 의미한다. 최대 지연시간과 RMS 지연 확산과 그에 따른 상관 대역폭을 Table 3에 나타내었다.
Table 3. RMS delay spread and coherence bandwidth according to experiment.
| Experiment 1 | Experiment 2 | |
| 0.020 s | 0.035 s | |
| 0.050 s | 0.068 s | |
| 10 Hz | 5.71 Hz |
Table 3에서의 결괏값은 추정의 오차가 존재하기 때문에 해당 구간에서의 결괏값의 평균값을 이용하였다. Table 3에 따르면 RMS 지연 확산은 실험 1에서 0.020 s이고 그에 따른 상관 대역폭은 10 Hz이다. 실험 2에서의 RMS 지연 확산은 0.035 s이고 상관 대역폭은 5.71 Hz이다. Table 3의 결과를 통해 거리가 증가할 때, RMS 지연 확산은 증가하고 상관 대역폭은 감소하는 것을 알 수 있다. 그리고 최대 지연시간을 통해 채널 추정 오류를 줄이기 위한 프레임 내의 파일럿 신호의 최소 길이를 알 수 있다.[2]
3.4 프레임 구성에 따른 성능 분석
채널 추정에 의한 오류를 최소화하기 위하여 프레임 내에서의 파일럿 신호 간의 간격과 동기 신호의 길이는 3.2절에서 추정한 상관 시간보다 짧게 설정되어야 하고 파일럿 신호의 길이는 최대 지연시간보다 길어야 한다.[2] 따라서 송신 신호의 프레임 내 파일럿 신호 간의 간격은 Table 3에 의하면 실험 1에서는 상관 시간인 175 msec보다 커야 하고 실험 2에서는 상관 시간인 340 msec보다 커야 한다. 수신단에서의 채널 추정은 PN(Pseudo-random Noise) 신호로 구성된 파일럿 신호로부터 least squares 기법을 이용하여 추정한 채널 값들을 선형 보간(linear interpolation) 하여 추정하였다. 등화기는 다중 탭 영점 강제 등화 기법(multi tap zero forcing equalizer)을 사용하였다.
본 절에서는 상관 시간보다 길게 동기 신호의 길이를 설정했을 경우와 상관 시간보다 짧게 동기 신호의 길이를 설정하였을 때의 동기화 결과를 비교한다. 그리고 상관 시간을 넘지 않도록 프레임 내 파일럿 신호의 간격을 설정하였을 경우와 상관 시간을 넘도록 파일럿 신호의 간격을 설정하였을 경우의 비트오류율을 비교한다.
실험 1
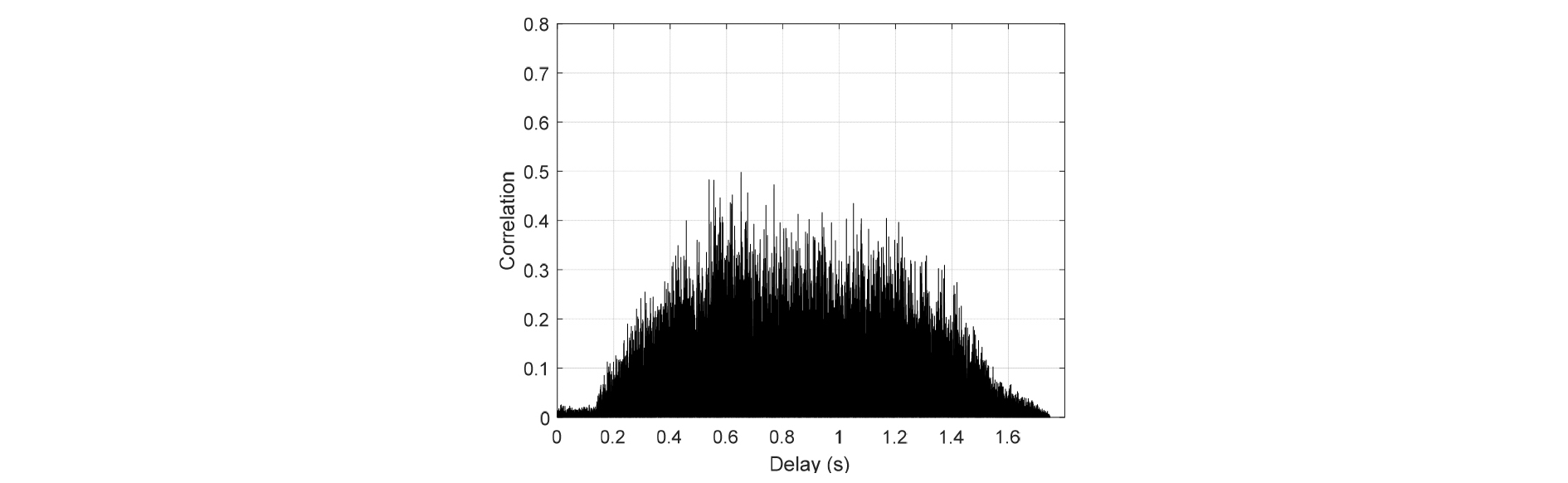
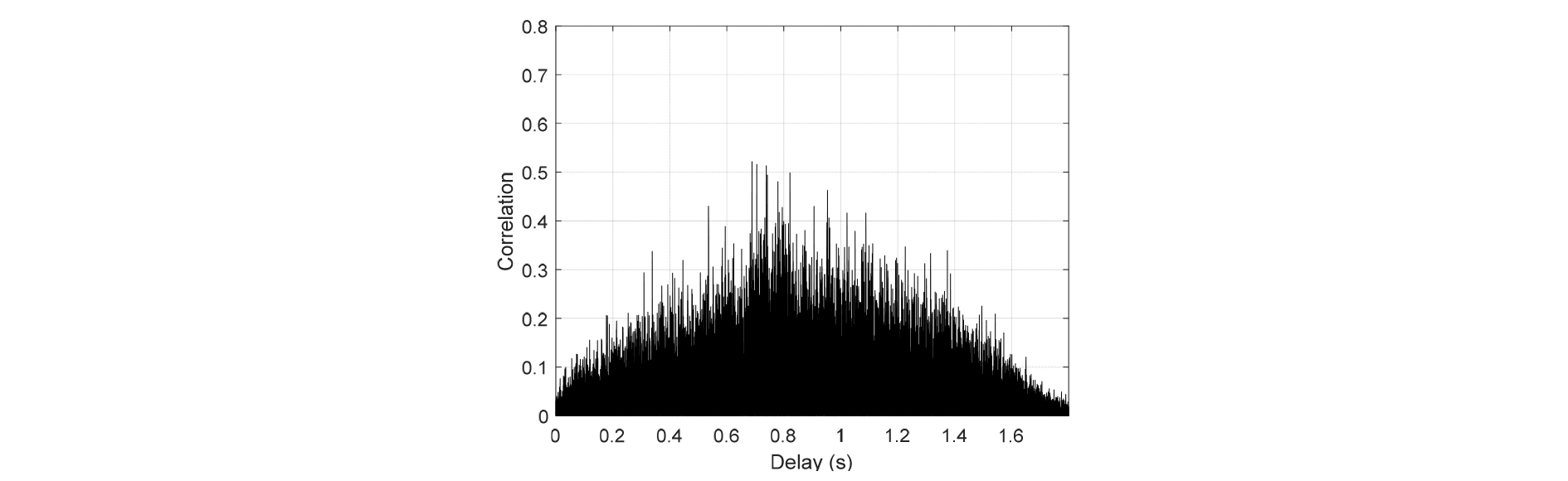
실험 1에서 동기 신호의 길이에 따른 동기화 결과는 Figs. 8과 9와 같다.Figs. 8과 9에서 는 동기신호의 길이이다. Fig. 8은 동기 신호가 150 msec일 때의 동기화 결과이고 Fig. 9는 동기 신호의 길이가 상관 신호의 길이보다 더 긴 경우의 동기화 결과이다. Fig. 8에서의 피크 지점에서의 상관계수와 평균 상관계수의 비는 17.4이고 Fig. 9에서의 비는 6.74이므로 Fig 8에서의 동기화 성능이 2.6배 더 좋은 것을 알 수 있다.
실험 1의 프레임 내 파일럿 신호의 간격과 비트오류율은 Table 3에 나타내었다.
Table 4에서 실험 1의 상관 시간인 175 msec보다 프레임 내 파일럿 신호 간의 간격을 짧게 설정한 경우인 130 msec, 150 msec, 170 msec인 경우에 비트오류율은 0.011, 0.017과 0.036으로 낮게 얻었다. 상관 시간보다 파일럿 신호의 간격을 190 msec로 설정한 경우에는 비트오류율을 0.050으로 비교적 높게 얻었다.
Pilot interval in frame and bit error rate in experiment 1.
| Pilot interval in Frame | BER (Bit Error Rate) |
| 130 msec | 0.011 |
| 150 msec | 0.017 |
| 170 msec | 0.036 |
| 190 msec | 0.050 |
실험 2
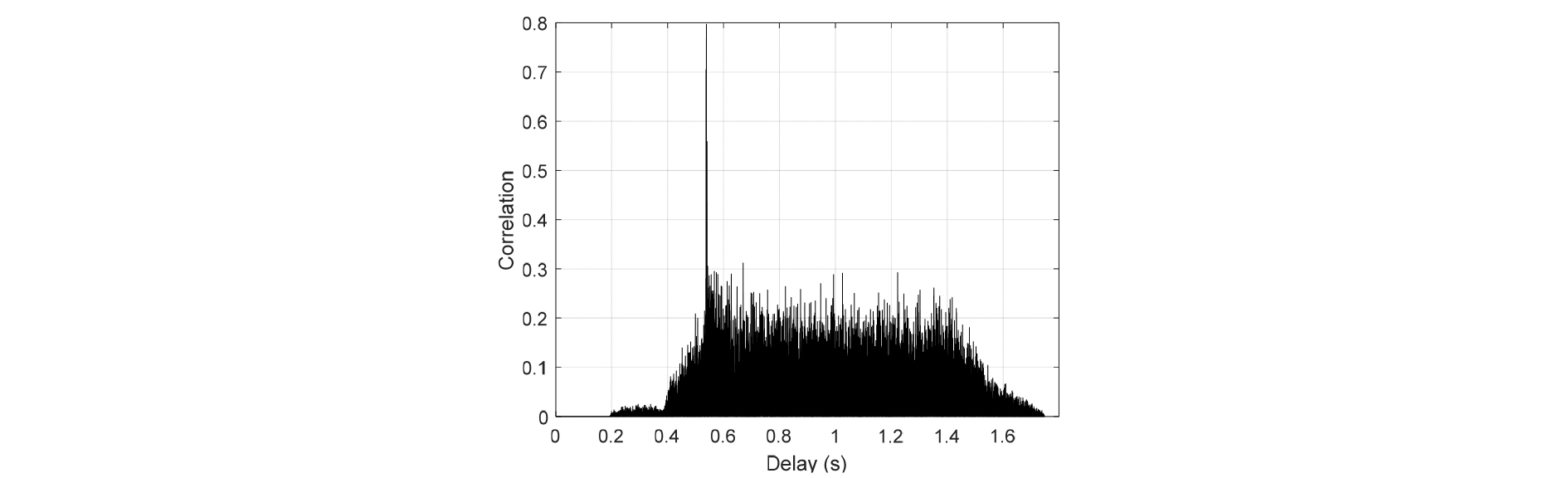
실험 2에서 동기 신호의 길이에 따른 동기화 결과는 Figs. 10과 11과 같다.
실험 2에서는 Fig. 10에서는 동기신호의 길이가 330 msec이고 Fig. 11에서는 동기신호의 길이가 상관 신호의 길이보다 긴 경우이다. Fig. 10에서의 피크 지점에서의 상관계수와 평균 상관계수의 비는 13.29이고 Fig. 11에서의 비는 8.2이므로 Fig. 10의 동기화 성능이 1.6배 더 좋은 것을 알 수 있다.

실험 2의 프레임 내 파일럿 신호 간의 간격과 비트오류율은 Table 4에 나타내었다.
Table 5에서 실험 2의 상관 시간인 340 msec보다 프레임 내 파일럿 신호 간 간격을 짧게 설정한 경우인 300 msec, 320 msec인 경우에 비트오류율은 0.028과 0.039로 낮게 얻었고, 상관 시간과 프레임 내 파일럿 신호 간 간격을 같게 설정한 경우인 340 msec인 경우에는 비트오류율을 0.050으로 낮게 얻었지만, 상관 시간보다 프레임 내 파일럿 신호 간 간격을 길게 380 msec로 설정한 경우에 비트오류율은 0.061로 비교적 높게 얻었다.
Pilot interval in frame and bit error rate in experiment 2.
| Pilot interval in Frame | BER (Bit Error Rate) |
| 300 msec | 0.028 |
| 320 msec | 0.039 |
| 340 msec | 0.050 |
| 380 msec | 0.061 |
실험 결과를 통해 상관 시간보다 랜덤 시퀀스 신호를 짧게 설정하는 경우에 도플러 환경을 극복하여 동기화 성능이 더 나아짐을 알 수 있다. 그리고 상관 시간보다 프레임 내 파일럿 신호 간의 간격을 짧게 설정하는 경우가 채널 추정의 오류가 줄어들어 비교적 작은 비트오류율을 얻었다.
IV. 결 론
본 논문은 실제 호수에서의 수중음향통신에 영향을 주는 변수를 분석하기 위해 최대 도플러 주파수, 상관 시간, RMS 지연 확산, 최대 지연시간 그리고 상관 대역폭을 산출했다. 실험은 거리에 따라 두 번 진행하였다. 실험 1의 상관 시간은 170 msec, 상관 대역폭은 10 Hz이였고, 실험 2의 상관 시간은 340 msec, 상관 대역폭은 5.71 Hz이었다. 실험 1과 실험 2에서 동기 신호의 길이가 상관 시간에 비해 짧은 경우와 프레임 내 파일럿 간격이 상관 시간에 비해 짧은 경우의 동기화 및 비트오류율 성능이 각각의 반대의 경우보다 더 우수함을 보였으므로 실험을 통해 도출한 결과가 적절함을 확인하였다.
