

I. 서 론
II. 소나 성능평가
2.1 탐지확률
2.2 소나성능함수
III. 최적화 기법을 적용한 최적심도 산출
3.1 최적화 기법
3.2 최적심도 산출을 위한 최적화 기법 적용
3.3 최적심도 산출 결과
IV. 동해 해역 최적심도 산출결과
V. 결 론
I. 서 론
대잠전에서 수상함의 선체부착형소나는 운용심도가 고정되기 때문에 해양환경에 따른 음파의 굴절로 인하여 탐지성능이 감소되는 단점이 있다. 예를들면, 우리나라의 여름 해양환경의 경우 수심에 따른 수온의 변화로 인하여 탐지성능이 크게 저하된다. 이러한 탐지성능의 제한사항을 극복하고자 해상작전헬기의 디핑소나, 수상함용 예인형 수동 소나 등을 운용하고 있다. 해상작전헬기의 디핑소나는 단상태 소나로서 수상함의 생존성을 보장하는 가운데 잠수함을 탐색 및 추적할 수 있고, 탐색구역을 빠르게 변경할 수 있는 장점이 있다. 또한, 해양환경에 따라 운용심도를 조절할 수 있기 때문에 음영구역이나 깊은 수심에 있는 표적을 탐지 할 수 있는 확률을 높일 수 있다. 그러므로 디핑소나의 탐지성능을 극대화 할 수 있는 심도를 예측하고, 운용하는 것은 매우 중요하다.
소나의 성능을 분석하고 최적심도를 산출하는 연구는 군사작전과 연계되어 공개되어 있는 연구가 많지 않다. 수동소나의 경우 최적심도 산출[1]과 수신기의 수심을 결정하기 위한 연구들이 일부 진행되었다.[2] 또한 수중 무선 센서 네트워크에서 통신성능 향상을 위한 센서 배치 최적화에 대한 연구[3] 등은 일부 수행되었으나 디핑소나의 최적심도 산출을 위한 연구는 상당부분 연구가 진행된 것으로 예상은 되나 공개된 연구는 제한적이다.
본 논문에서는 해양환경에 따른 디핑소나의 최적심도를 산출하기 위하여 최적화 알고리즘을 적용하였다. 디핑소나의 탐지성능을 평가할 수 있는 소나성능함수를 정의하여, 최적화 알고리즘의 목적함수로 설정하였다. 소나성능함수는 표적을 탐지할 확률과 표적이 특정 수심과 거리에 위치할 확률을 포함함으로써 운용수심, 해양환경, 표적의 위치에 따라 탐지성능을 평가할 수 있도록 정의 하였다. 소나성능함수가 최대값을 가지는 심도가 디핑소나의 최적심도인데, 계산시간을 단축하기 위해서 최적화 알고리즘을 적용하였다. 또한, 최적화 알고리즘을 적용한 최적심도 산출결과와 소나성능함수를 직접 계산한 결과를 비교하여 알고리즘의 정확성을 검증하였다. 계산시간이 빠른 장점을 활용하여 동해 여름 해양환경에서 표적의 예상심도에 따른 최적심도 산출결과를 비교하였다.
본 논문의 구성은 다음과 같다. 2장에서는 디핑소나의 성능평가를 위한 소나성능함수에 대한 내용, 3장에서는 최적화 기법, 4장에서는 최적화 기법을 적용한 동해 해역 최적심도 산출결과 및 분석, 5장에서는 논문의 결론 및 토의에 대한 내용을 다룬다.
II. 소나 성능평가
디핑 소나의 최적심도를 산출하기 위해 탐지성능의 평가 기준을 정하는 것은 중요한 문제이다. 소나 탐지성능을 평가하는 기준에 따라 최적심도 산출 결과가 달라지기 때문이다. 본 논문에서는 소나 탐지성능 평가를 위해 탐지확률을 기준으로 최적심도를 산출하였다. 또한, 표적의 위치에 따른 소나 탐지성능을 고려하기 위하여 표적의 거리와 심도에 대한 확률밀도함수로 나타내어 소나 성능평가 기준에 포함될 수 있도록 했다.
2.1 탐지확률
소나의 성능을 평가할 때 신호이득 또는 성능지수 등을 사용하면 값의 범위가 넓고 변동이 심하기 때문에 소나 탐지성능 평가의 기준으로 사용하기 어려운 단점이 있다. 반면, 탐지확률은 0 과 1 사이의 값으로 나타낼 수 있어 값의 변동성이 작으며 확률적인 관점으로 소나 탐지 성능을 평가할 수 있다.
본 연구에서 적용한 탐지확률은 신호이득에 대한 확률분포로 계산할 수 있다. 신호이득이 정규분포를 따른다고 가정하면 소나의 탐지확률은 아래 Eq. (1)과 같이 나타낼 수 있다.[1]
는 신호이득, 는 탐지확률, 는 신호이득의 표준편차이다. 신호이득은 신호 대 잡음비를 dB로 나타낸 것으로 0 dB일 때 탐지확률은 50 %이며, Eq. (2)와 같이 계산할 수 있다.
은 성능지수, 과 은 디핑소나에서 표적까지의 전달손실이다. 성능지수는 Eq. (3)과 같이 나타낼 수 있으며,[4] 본 연구에서는 일정하다고 가정하였다.
은 음원준위, 은 소음준위, 는 표적강도, 는 지향지수, 는 탐지문턱을 의미한다. 본 연구에서는 소음제한환경에서의 소나 탐지성능을 고려하였다. 해상작전헬기의 작전구역이 군함 및 상선 등의 선박 소음이 발생하는 구역으로 소음에 의한 영향이 클 것으로 판단하였다.
2.2 소나성능함수
소나의 성능을 나타내는 대표적인 지표중에는 예상탐지거리가 있다. 예상탐지거리는 Eq. (1)에서 산출한 탐지확률이 50 %가 되는 거리를 의미한다. 하지만 해양환경에서는 음속구조, 음영구역, 수렴대, 다중경로 등의 음파전달 현상이 발생하기 때문에 탐지확률이 50 %가 되는 거리가 여러지점이 될 가능성이 많다. 그러므로 예상탐지거리로 소나의 탐지성능을 평가해서 최적심도를 산출하기에는 제한이 있다.
본 논문에서는 탐지확률, 표적의 심도와 거리에 대한 확률밀도함수를 기반으로 하여 디핑소나의 소나성능함수를 Eq. (4)와 같이 제안하였다.
은 디핑소나의 심도, 는 표적의 심도, 는 표적과 디핑소나 사이의 수평거리, 는 해역 수심, 는 탐지확률이다. 는 확률밀도함수로서, 표적이 특정 수심 에 위치할 우도(likelihood)를 나타낸다. 은 표적거리 에서 표적이 위치할 우도를 나타내는 확률밀도함수이다.
Eq. (4)에서 는 , , 에 대한 함수이며, 표적의 위치는 알 수 없기 때문에 표적의 위치를 확률밀도함수로 나타내었다. 는 정규분포를 따르는 확률밀도함수로 가정하였다. 또한, 는 표적의 거리를 알고 있을 경우는 델타함수로 나타내고, 표적의 거리를 모르는 경우에는 균일 분포로 나타낼 수 있다고 가정하였다.
그러므로 Eq. (4)의 소나성능함수는 탐지확률에 표적이 특정수심과 거리에 위치할 우도에 비례하는 가중치를 곱하여[1] 거리와 수심방향으로 적분한 값이라고 할 수 있다. 탐지확률에는 해양 환경에 따른 탐지성능이 고려되어 있으며, 표적의 심도와 거리에 따른 탐지성능의 변화까지 확률적 접근을 통해 고려한 것이다.
소나성능함수를 Fig. 1과 같이 동해 여름 해양환경에서 표적의 상황에 따라 모의 하였다. 해저면의 물성치는 기존자료[5]를 참고하여 밀도는 1470 kg/m3, 음속은 1585 m/s로 설정하였다.
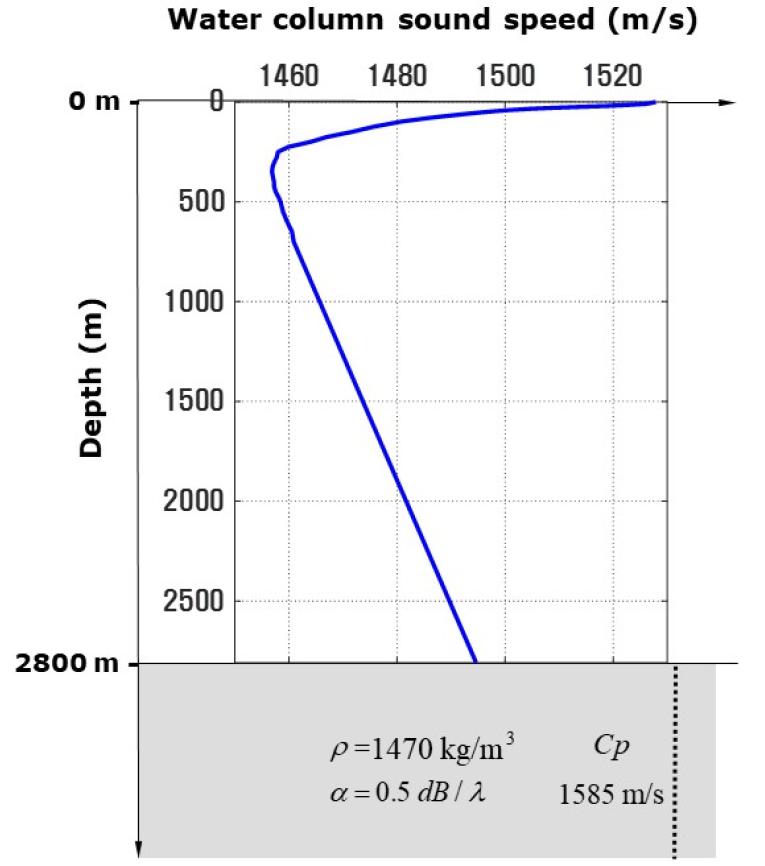
전달손실은 음파전달모델인 Bellhop을 이용하여 산출하였다.[6] 음원의 주파수는 3.5 kHz로 설정하였다. Eq. (1)에서 신호이득의 표준편차는 8 dB로[1] 설정하고, 성능지수는 120 dB로 설정하였다. 이때, 음원준위는 210 dB, 소음준위는 90 dB, 표적강도는 5 dB, 지향지수는 5 dB, 탐지문턱은 10 dB로 설정하였다.
Fig. 2는 Eq. (4)에서 거리와 수심에 대한 확률밀도함수를 적용한 탐지확률 필드와 적용하지 않은 탐지확률필드를 나타낸 것이다. Fig. 2(b)에서와 같이 표적이 특정수심에 위치할 우도에 비례하여 가중치를 곱하여 줌으로써 탐지확률과 함께 표적의 위치를 고려한 소나성능함수를 계산할 수 있다.
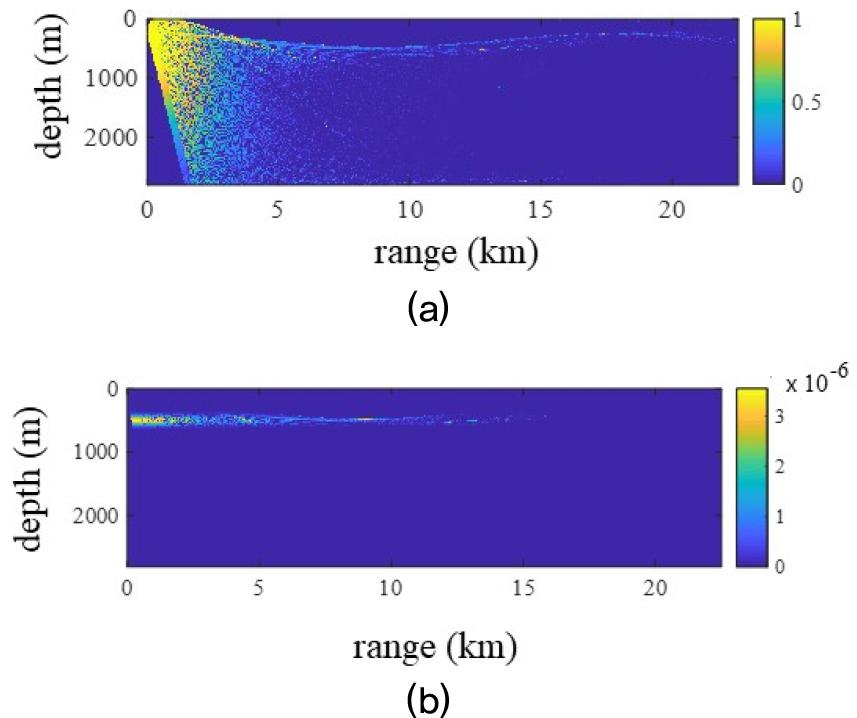
Fig. 3는 소나성능함수를 두가지 상황을 가정하고 디핑소나의 운용심도 0 m ~ 300 m에 대해 산출한 결과이다. Fig. 3(a)는 표적의 심도와 거리를 모를 때, Fig. 3(b)는 표적의 심도는 모르지만 거리는 알고 있을 때의 상황을 가정하였다. 표적의 위치를 모를 때와 거리를 알 때 소나성능함수의 계산결과와 형태가 다르게 나타나는 것을 알 수 있다. 하지만 두가지 경우 모두 소나성능함수가 최대가 되는 최적심도는 존재하는 것을 알 수 있다. Fig. 3(a)의 경우 디핑소나가 247 m에서 소나성능함수가 최대가 되며, Fig. 3(b)의 경우 141 m에서 최대가 되는 것을 알 수 있다.
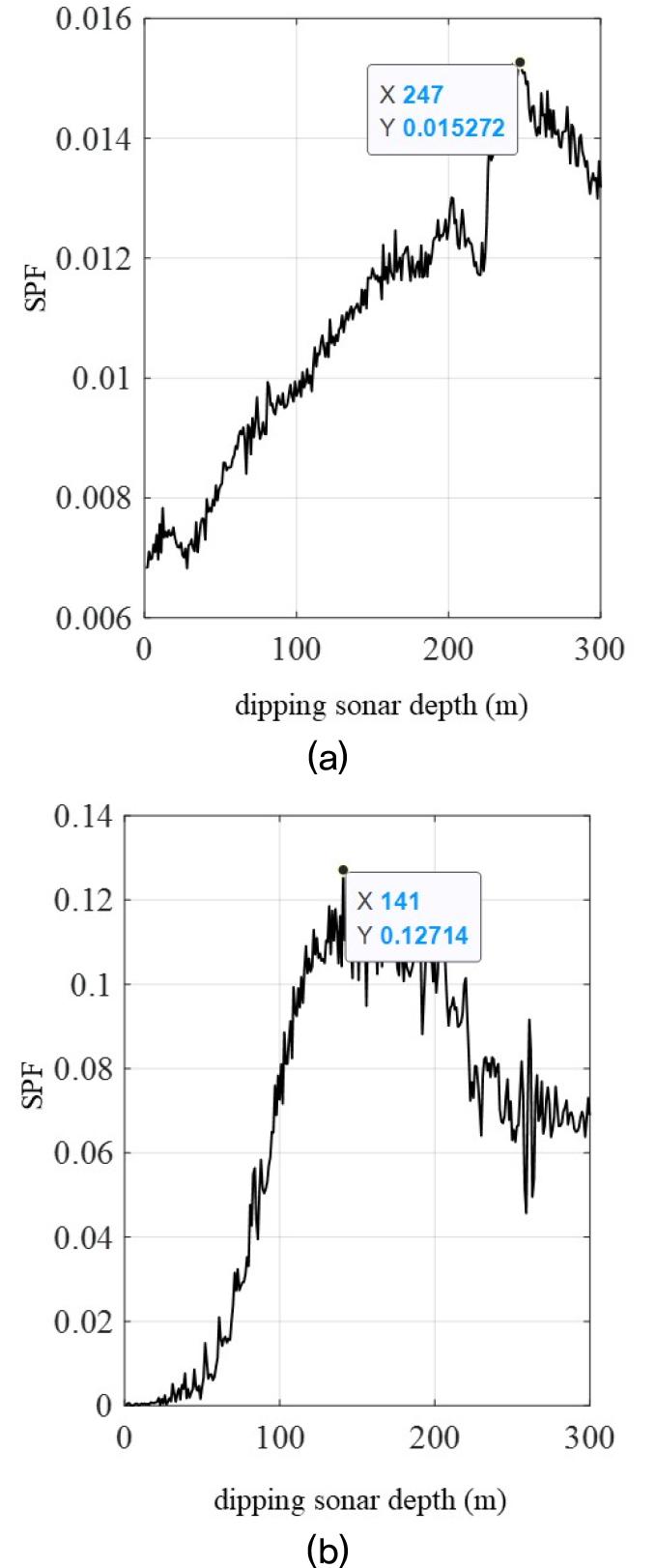
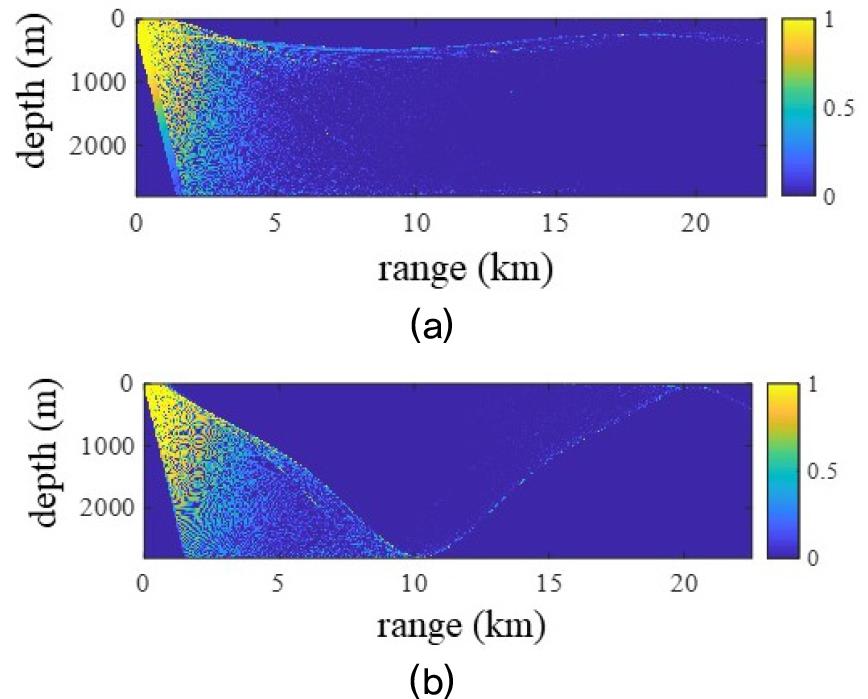
Fig. 4은 디핑소나가 최적심도일때와 그렇지 않은 경우의 탐지확률을 나타낸 것이다. Fig. 4(a)는 디핑소나가 Fig. 3(a)와 같은 상황에서 최적심도인 247 m에서 운용할 때의 탐지확률이며, Fig. 4(b)는 최적심도가 아닌 50 m에서 운용했을 때 탐지확률을 나타낸 것이다. 최적심도인 247 m에서 운용했을 때 탐지확률이 전반적으로 높게 나타나는 것을 확인할 수 있다.
III. 최적화 기법을 적용한 최적심도 산출
2장에서 표적의 상황에 따라 소나성능함수의 형태가 달라지며, 소나성능함수가 최대가 되는 최적심도가 존재하는 것을 확인하였다. 본 논문에서는 계산량을 최소화하기 위해 최적화 기법을 적용하여 최적심도 산출 방법을 제안하였다.
3.1 최적화 기법
최적심도 산출시 구하고자 하는 결과값은 디핑소나의 최적 운용 심도이고, 가능한 해는 소나성능함수가 최대가 되는 심도이다. 또한, 디핑소나는 단상태 소나이므로 최적심도 산출시 음원과 수신기의 심도가 동일하다. 디핑소나의 심도에 따른 소나성능함수 값은 해양환경에 따라 다양하게 나타나겠지만, 복잡하지 않은 최적화 알고리즘으로도 해를 찾을 수 있는 형태이다. 또한, 본 연구에서 제안한 최적심도 산출 알고리즘은 실제 작전에서 실시간으로 사용 될 수 있도록 효율적으로 계산되어야 한다. 단, 계산시간이 빨라져도 산출하는 해(최적심도)의 정확성이 떨어지지 않는 범위 내에서만 계산시간 단축이 이루어져야 한다. 이러한 고려사항들을 감안하여, 본 논문에서는 Simulated Annealing(SA)를 최적화 기법으로 적용하였다.
SA는 광역 최적화 지점을 확률적 기법으로 탐색해 나가는 최적화 기법이다.[7] 확률적 기법을 통해 지역 최소점에 갇히는 것을 방지하고 광역 최적화 값을 빠르게 탐색하면서 수렴하여 해를 구하는 특징 이 있다. 또한, 광역 최적점을 찾으면서도 계산과정이 빨라 지음향 역산,[8,9] 실험용 청음기 배열 최적설계[10] 등에 적용 되었으며, 군사적 최적화 문제에도 많이 적용되었다. 그러므로, 본 연구에서는 계산횟수를 단축하면 서도 좋은 품질의 해를 찾을 수 있으며, 광역 최적점을 찾기에 적합한 SA 기법을 적용하였다.
3.2 최적심도 산출을 위한 최적화 기법 적용
Fig. 5은 최적심도 산출을 위한 알고리즘의 흐름도 이다. 운용가능심도를 기초로 디핑소나의 초기 심도를 결정하고, 계산횟수에 따른 온도를 Eq. (5)에 의해 계산한다. 여기서 온도는 해를 찾기 위한 탐색범위를 의미한다.
는 초기온도이고, 는 계산 반복 횟수이다. 식(5)는 계수에 따라 탐색범위의 수렴정도를 결정하고,[7]는 본 연구에서는 해당 해역의 수심으로 설정하였다.

다음단계는 Eq. (6)과 같이 온도에 -1부터 1까지 임의의 값을 곱하여 새로운 디핑소나의 심도를 결정한다.
는 구하고자 하는 디핑소나의 심도, 는 현재의 디핑소나의 심도, 는 온도, 는 1과 -1사이의 임의의 수이다.
다음단계에서는 새로운 디핑소나의 심도 에서의 목적함수를 계산하는데, 본 연구에서는 Eq. (4)의 소나성능함수를 목적함수로 한다. 새로운 디핑소나의 심도에서 소나성능함수를 계산하여 현재 디핑소나의 심도 에서 소나성능함수의 값과 비교하여 이전 값보다 큰 값이면 새로운 디핑소나의 심도를 저장하고 다음 계산으로 넘어가게 된다. 하지만 소나성능함수가 이전 값보다 작을 경우에는 Eq. (7)과 같은 확률로 허용 함수[7]에 의해서 디핑소나의 심도와 소나성능함수 값의 저장여부를 결정하게 된다.
는 과 에서 소나성능함수 값의 차, 는 현재의 온도이다. 허용함수에 의해 현재의 디핑소나의 심도와 소나성능함수 값의 저장이 허용되면 현재의 디핑소나의 심도를 저장하고, 허용되지 않으면 다음 계산으로 진행하여 새로운 디핑소나의 심도를 정하는 단계로 계산을 반복하게 된다. 허용을 하는 기준은 Eq. (7)의 확률로 정해지며, 과 에서의 소나성능함수 값의 차이에 따라 확률이 달라진다. 디핑소나의 심도가 하나의 값으로 수렴하여 종료조건을 만족하게 되면 알고리즘은 종료 된다. 본 연구에서 종료조건은 소나성능함수의 평균값이 일정 값 이하로 변화가 없을 때 이다. 찾고자 하는 디핑소나의 심도를 찾지 못하였을 경우에는 새로운 탐색범위를 지정하여 탐색을 다시 시작하는 복원과정을 통해 해를 찾게 된다.
3.3 최적심도 산출 결과
3.2 절에서 설명한 최적심도 산출 알고리즘을 검증하기 위해 목적함수를 직접 계산한 결과와 최적화 기법을 통해 산출한 최적심도 산출결과를 비교하였다. 해양환경은 Fig. 1의 동해 여름 해양환경을 적용 하였다.
Fig. 6는 Eq. (4)의 소나성능함수를 운용 가능수심에 대해 산출한 결과와 최적화 기법을 적용하여 최적심도를 산출한 결과를 겹쳐 그린 결과 이다. 결과 검증을 위해 최적화 알고리즘을 50번 반복하여 산출하였으며, 별표(*)로 표시한 부분이 디핑소나의 최적심도 산출 결과이다. Fig. 6(a)는 표적의 예상활동심도가 100 m일 때, Fig. 6(b)는 표적의 예상활동심도가 500 m일 때 최적심도 산출 결과이다. 그림에서 보는 것과 같이 최적화 기법을 통해 산출한 최적심도 산출결과와 직접계산 결과가 대부분 일치하는 것을 알 수 있다. 광역최소화에 갇히는 것을 방지하기 위해 확률적 접근을 하는 알고리즘의 특성상 모든 경우에 일치하는 것은 아니었으나, 최적심도값과 근사한 값을 가지므로 소나 성능에 큰 영향은 없을 것으로 예상된다.
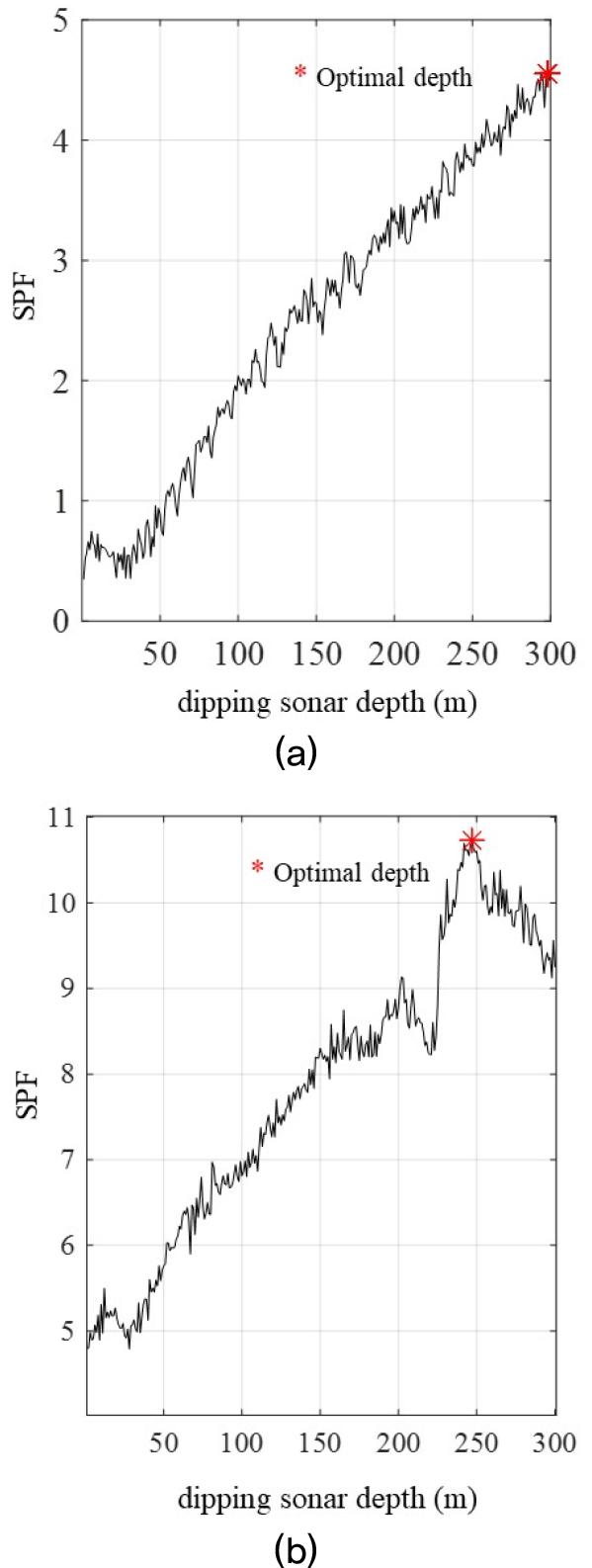
Fig. 7은 Fig. 6의 최적심도를 산출하기 위해 계산횟수를 반복했을 때 소나성능함수와 최적심도의변화과정과 최종 산출결과를 보여주고 있다. 계산횟수가 증가함에 따라 최적심도로 수렴하는 것을 볼 수 있다.
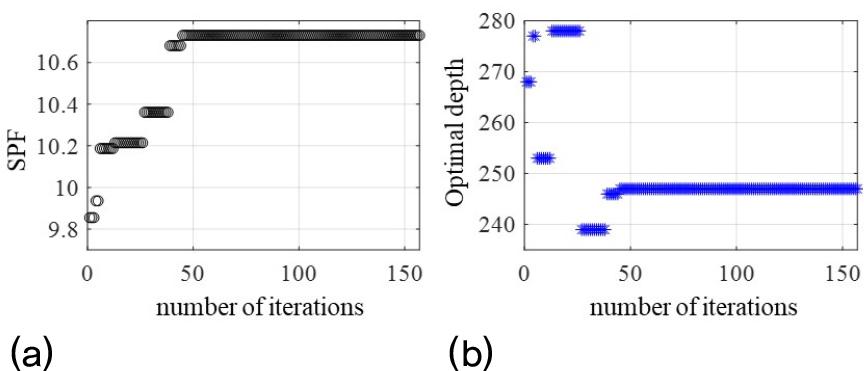
Table 1은 소나성능함수를 직접 계산한 결과와 최적화 기법을 적용하여 최적심도를 산출하였을 때 계산횟수와 계산결과를 비교한 것이다. 최적심도 산출 결과와 소나성능함수의 값은 일치하며, 최적화 기법을 적용하였을 때 계산효율이 증가하는 것을 알 수 있다. 또한, 본 알고리즘은 최적화 기법의 특성 상 소나의 운용가능심도의 범위가 넓을수록 계산 효율은 커지며 디핑소나와 달리 음원과 수신기의 심도가 다른 경우에는 계산효율이 훨씬 더 좋아지는 이점이 있다.
IV. 동해 해역 최적심도 산출결과
3장에서 소개한 최적화 기법을 적용하여 동해 해역에 대한 디핑소나 최적심도를 산출하였다. Fig. 8는 해당 해역에서의 수심정보이다. 수심은 600 m ~ 3,700 m 사이로 서해에 비해 매우 깊으며, 빨간색 점으로 표시된 지점에서 최적심도를 산출하였다. 음속구조는 NOAA Ocean data base 의 수온 및 염분자료를 기반으로 산출하였으며, 동해 여름 해양환경에 해당하는 데이터를 적용하였다.[11] 수심 데이터는 GTOPO 30(Global 30 Arc-Second Elevation) 모델을 사용하였다.[12] 해저지질의 물성치는 Fig. 1과 동일하게 설정하였다.
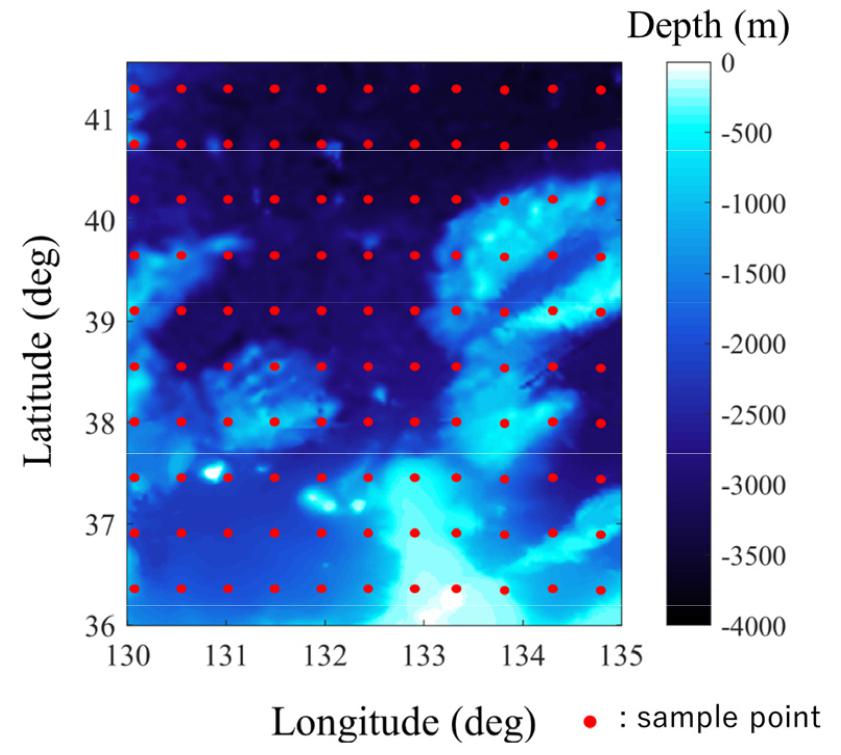
Fig. 9(a)는 표적의 예상활동수심이 100 m일 때, Fig. 9(b)는 표적의 예상활동수심이 500 m일 때 동해 여름 해양환경에서 최적심도를 산출한 결과이다. 표적이 100 m 부근에서 활동이 예상될 때 최적심도는 동해해역 전체에서 주로 250 m ~ 300 m 사이에서 형성되나, 표적이 500 m 부근에서 활동할 때 최적심도는 해역의 경위도에 따라 달라지는 것을 확인할 수 있다. 북위40도 이북의 해역에서는 디핑소나의 최적심도가 60 m ~ 100 m 사이에서 형성이 되지만, 북위 40도 이남 해역에서는 210 m ~ 290 m 사이에서 최적심도가 형성되는 것을 알 수 있다. 북위 40° 이북 해역은 깊은 수심으로 인해 표적의 예상위치에 따라 디핑소나 최적심도가 100 m 이상 차이날 수 있음을 확인할 수 있다.
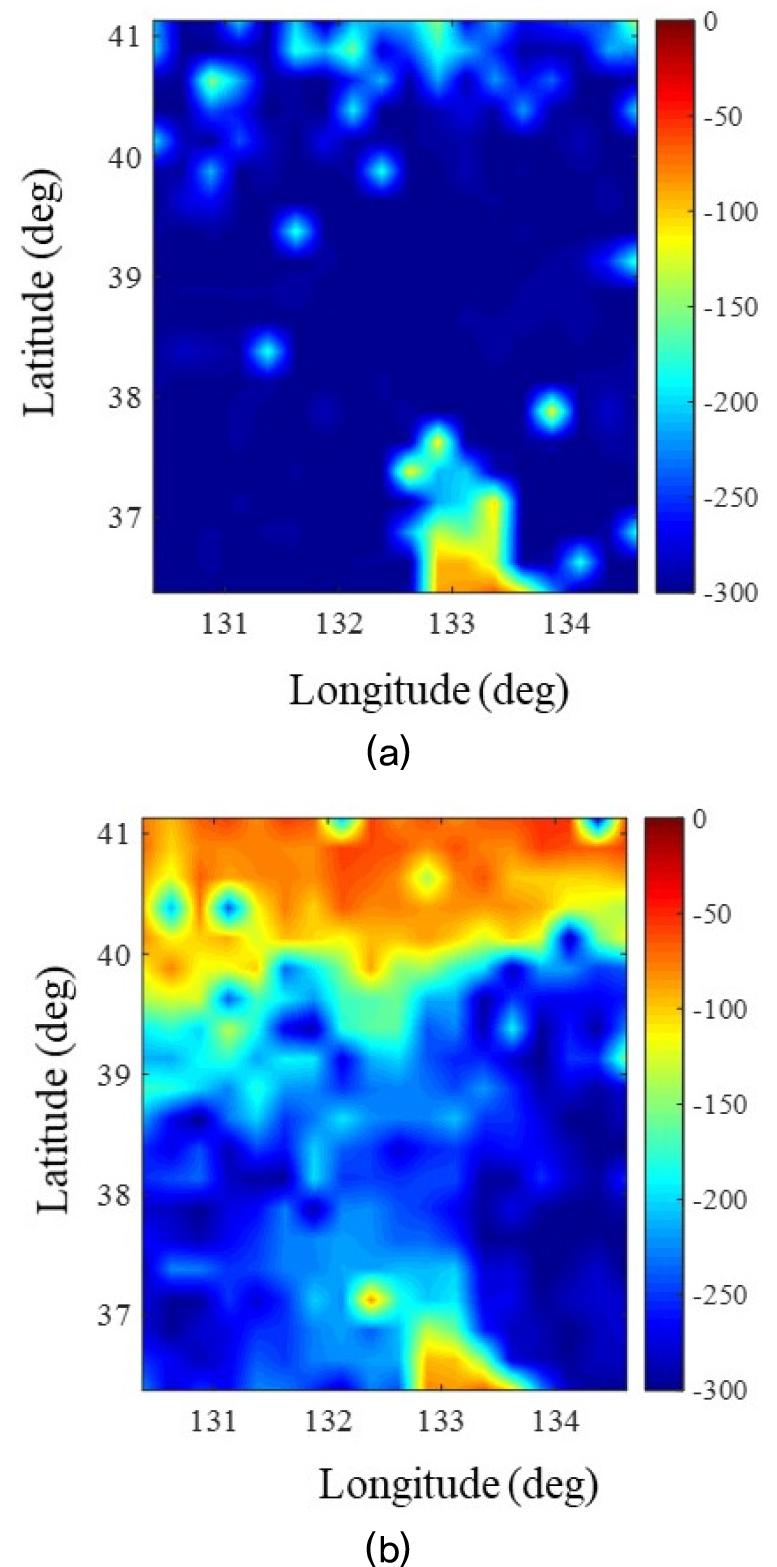
Fig. 9 과 같이 해역 전반에 따른 디핑소나의 최적심도를 산출하여 해상작전헬기의 대잠작전 임무전 정보로 활용한다면 디핑소나의 최적심도에 대한 초기값으로 활용 할 수 있다. 또한, 알고리즘을 수상함의 전투체계에 탑재하여 실시간으로 임무해역에 대한 최적심도를 산출 할 수 있다.
V. 결 론
본 논문에서는 최적화 기법을 적용하여 해상작전헬기 디핑소나의 최적심도 산출을 위한 알고리즘을 제안하였다. 소나의 탐지확률을 기반으로 소나의 탐지성능을 정확히 평가하기 위해 소나성능함수를 정의하고, 디핑소나의 최적심도를 산출하였다. 또한, 표적의 위치에 따라 소나의 탐지성능이 변하므로 표적의 심도와 거리를 확률밀도함수로 나타내어 소나의 탐지성능 평가 요소에 포함 될 수 있도록 하였다. 최적심도를 산출하기 위해 소나성능함수를 디핑소나의 운용가능심도에 대해 모두 산출하려면 많은 계산노력이 필요하므로 최적화 알고리즘을 적용함으로써 이러한 문제를 극복하였다. 최적화 알고리즘을 적용하여 최적심도를 산출한 결과, 직접계산에 비해 계산효율을 증가시킬 수 있으며, 계산결과는 직접산출 결과와 동일함을 검증하였다. 또한, 이러한 계산상의 효율성을 활용하여 동해해역 전체에 대해 여름해양환경에서의 최적심도를 산출하였다.
본 논문에서 제안한 알고리즘은 최적화 기법을 적용하여 계산시간을 단축함으로써, 해상작전헬기의 모함 임무를 수행할 함정의 전투체계에 탑재되는 것을 목표로 하였다. 해상작전헬기 디핑소나의 최적심도를 대잠전 지휘관과 운용자에게 권고함으로써 디핑소나의 탐지성능을 극대화 시킬 수 있을 것이다. 또한 앞으로 개발되어 수상함에 탑재될 능동예인형소나의 최적심도 산출에도 활용될 수 있을 것이다.
