

I. 서 론
II. 어라운드 뷰 소나 및 굴착깊이 측정 소나 구성 및 원리
III. 어라운드 뷰 소나 및 굴착깊이 측정 소나 성능 검증 실험
IV. 어라운드 뷰 소나 및 굴착깊이 측정 소나 실해역 실험
V. 결 론
I. 서 론
최근 해양관련 개발 사업이 원활히 이루어지고 있다. 국내에서도 이러한 실정에 맞춰 관련 장비의 개발이 진행되고 있으며 원격조종 무인잠수정(Remotely Operated underwater Vehicle, ROV)을 활용하고 있다. 국내에도 2013년부터 현재까지 해양관련 개발 사업을 수행할 트랙기반 중작업용 ROV 개발 사업이 진행되어 실험을 진행하고 있다.[1] 해양환경 특성상 육상과는 달리 환경에 영향을 많이 받는데 조류가 약하거나 탁도가 거의 없는 해역의 경우 수중 카메라로 수 미터 거리의 시야 확보가 가능하지만 탁도가 높은 해역이나 작업 지역에서는 침전된 부유물로 인해 전방의 시야가 1 m 거리도 되지 않아 수중 카메라로 시야를 확보하기 어렵다.[1] Fig. 1과 같이 실제 ROV의 작업 환경을 수중 카메라로 취득한 영상으로 부유물이 많거나 조류가 강한 지역에서는 시야확보가 어렵다는 것을 보여주고 있다. 그리고 기존의 중작업용 ROV의 경우 수중 카메라를 통해 작업 환경, 장애물을 확인하며 이미지 소나 장비가 장착되어 있으나 한 채널만 부착되어 있기 때문에 ROV 전방향을 확인을 못하기 때문에 ROV 운용이 어려운 실정이다.

본 논문에서 이러한 문제를 해결하고자 ROV에 적용 가능한 어라운드 뷰 소나(이미지 소나) 및 굴착깊이 측정 소나(Multi Beam Echo Sounder, MBES)를 개발하였다. 소나의 경우 수중을 탐사를 하는 장비로써 탁도가 높은 환경에서도 큰 영향을 받지 않고 수중에 있는 물체를 탐지할 수 있다.[2] 본 논문에서는 적용한 어라운드 뷰 소나의 경우 기존의 ROV와 달리 ROV 4방향에 개발한 이미지 소나를 장착하여 ROV 360° 전방향으로 탐지할 수 있어 전방향에 있는 장애물이나 물체 탐지가 가능하며, 굴착깊이 측정 소나 또한 개발한 multi-beam echosounder를 ROV에 장착하여 ROV가 굴착 작업을 수행 후 굴착 깊이를 측정할 수 있도록 설계되었다.[3-5]
본 논문에서는 소나의 성능을 검증하기 위해 동해안 해역에서 ROV를 진수시켜 운용하면서 소나영상으로 전방 물체, 지형 탐지 및 굴착 깊이, 폭 등의 데이터를 취득하여 성능을 검증하는 실험을 수행하였다. 위의 실험 결과를 토대로 ROV에 적용 가능한 어라운드 뷰 소나 및 굴착깊이 측정 소나를 활용할 경우 ROV를 이용한 수중 중작업의 효율성을 높일 수 있을 것으로 예상된다.
II. 어라운드 뷰 소나 및 굴착깊이 측정 소나 구성 및 원리
Fig. 2는 어라운드 뷰 소나와 굴착깊이 측정 소나가 ROV에 장착되는 위치 및 각 소나를 보여주고 있으며, 우측상단이 어라운드 뷰의 이미지 소나 하단이 굴착깊이 측정 소나를 보여주고 있다. 어라운드 뷰 소나의 경우 이미지 소나가 ROV의 전후좌우 4방향에 장착되어 ROV 전방에 있는 물체를 탐지할 수 있도록 설치되어 있고 굴착깊이 측정 소나는 ROV 전방에 장착되어 후방에 있는 굴착 작업 후 ROV를 후방으로 이동하면서 굴착된 깊이를 측정할 수 있도록 설치된다.

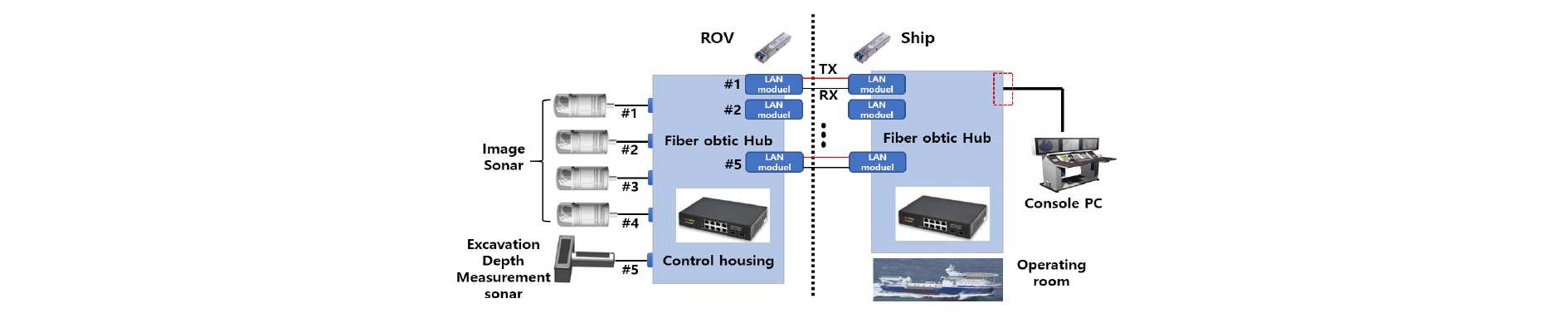
Fig. 3은 어라운드 뷰 소나 및 굴착깊이 측정 소나 다이어그램을 나타낸 것으로 선상의 운용실과 ROV에 설치된 광 허브를 통해 각각의 장비와 통신을 수행하도록 설치되어 있고 5개의 단자를 통해 운용실과 이미지 소나와 굴착깊이 측정 소나간 광 통신으로 데이터를 주고받는다.
먼저 어라운드 뷰 소나의 경우 이미지 소나를 사용하여 ROV 전방위를 탐지할 수 있는데 이미지 소나의 원리는 육상에서 랜턴을 사용하여 사물을 비출 때 그림자가 생기는 것과 유사하며 Fig. 4와 같이 수중에서 음파신호를 송신하고 반사된 수신신호를 신호처리하면 반사된 신호의 세기에 따라 물체가 소나 영상에 표시되고 물체 뒤쪽으로 그림자 영역이 생긴다.
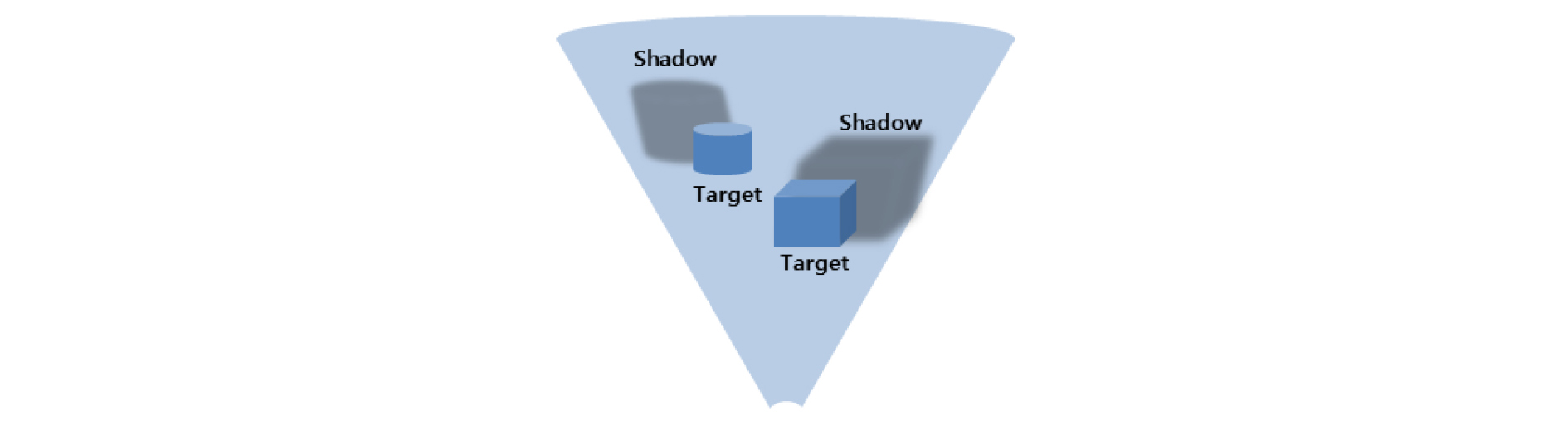
Fig. 5는 이미지 소나의 운용 개념을 나타낸 것으로 ROV와 운용실간 광 통신을 통해 연결되며 운용실에서 동작 명령을 보내면 이미지 소나의 CPU(Central Processing Unit)에서 명령을 수신 후 FPGA(Field Pragrammmable Gate Array) 모듈에서 송신 파형을 생성하여 이미지 소나의 각 채널로 전기적 신호를 전달한다. 이미지 소나의 센서는 전기적 신호를 물리적 음파 신호로 변환 하여 수중에 음파를 송신한다. 그리고 반사된 신호는 센서에서 다시 전기적 신호로 변환하고 수신모듈로 전달되면 증폭, 필터링, A/D(Analog/Digital)변환, FFT(Fast Fourier Transform) 신호처리를 통해 2D 이미지 영상을 전시한다. 본 논문의 이미지 소나의 사양은 수평 130°, 수직 10° 이내의 빔 폭을 가지며 1°이하의 거리 분해능 성능으로 전방에 부채꼴 형태의 빔을 송신한다.
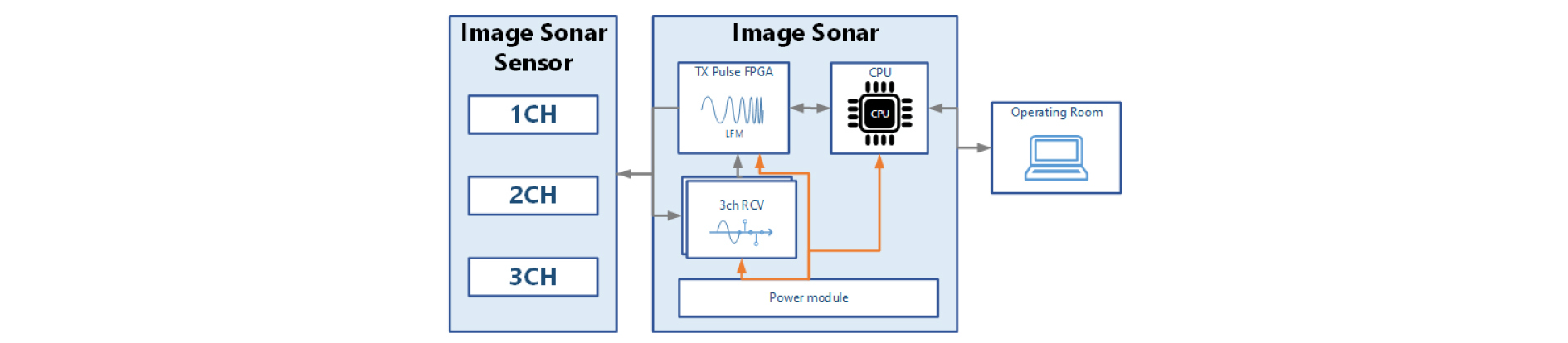
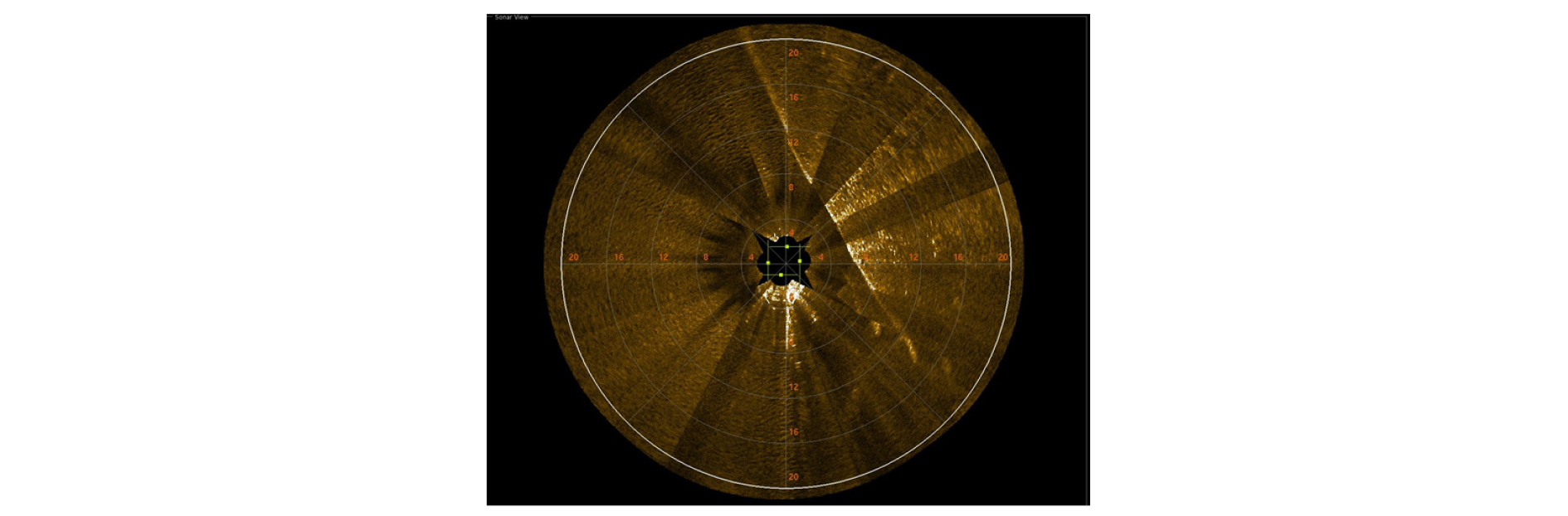
Fig. 6은 실해역에서 취득한 어라운드 뷰 소나 영상으로 이미지 소나 4대의 영상을 합쳐 360° 전방향을 전시할 수 있다. 어라운드 뷰 소나 영상에서 오버랩영역은 영상혼합 알고리즘을 적용하여 영상처리 하고 전방위에 대한 소나영상을 전시한다. 영상혼합 알고리즘은 소나 영상에서 오버랩되는 영상 1, 2의 픽셀을 RGB로 분리하여 R = max(R1, R2), G = max(G1, G2), B = max(B1, B2)로 오버랩되는 영역은 비교하여 높은 값을 전시하도록 영상처리하였다.
다음으로 굴착깊이 측정 소나는 멀티빔 음향측심기로써 Fig. 7과 같이 수평방향으로 넓은 부채꼴 형상의 빔을 송신하고 반사된 각 채널별 수신신호를 수신하여 2D로 수심 라인을 전시한다. 싱글 빔 타입과 달리 멀티 빔을 송수신하기 때문에 고해상도의 데이터 취득이 가능하며 ROV 최대 굴착깊이는 2 m 폭은 약 70 cm 정도가 된다. 이러한 사양에 맞춰 개발된 굴착깊이 측정 소나의 사양은 Swath 범위(한 번에 계측할 수 있는 빔 범위) 60°를 가지며, 최대 측정 깊이는 10 m 이상, 1° 이하의 분해능을 갖도록 개발되었다.[3]
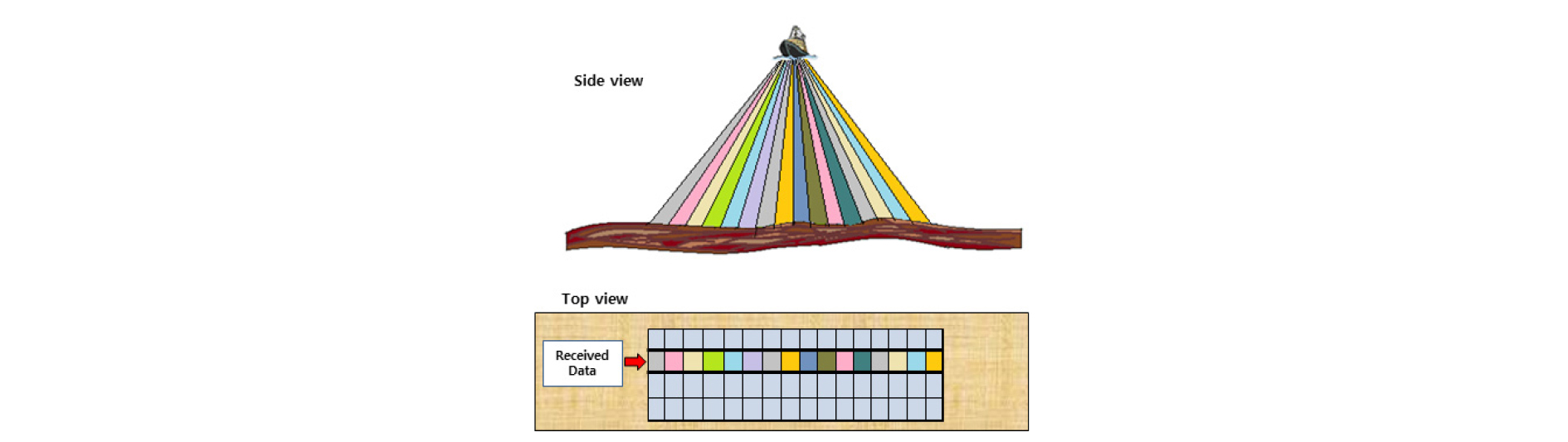
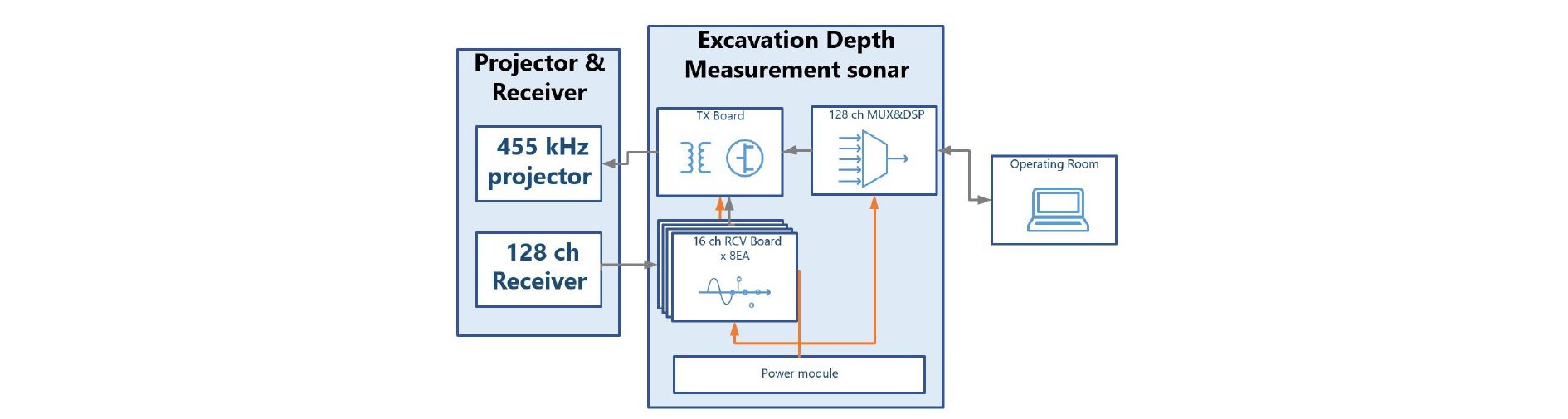
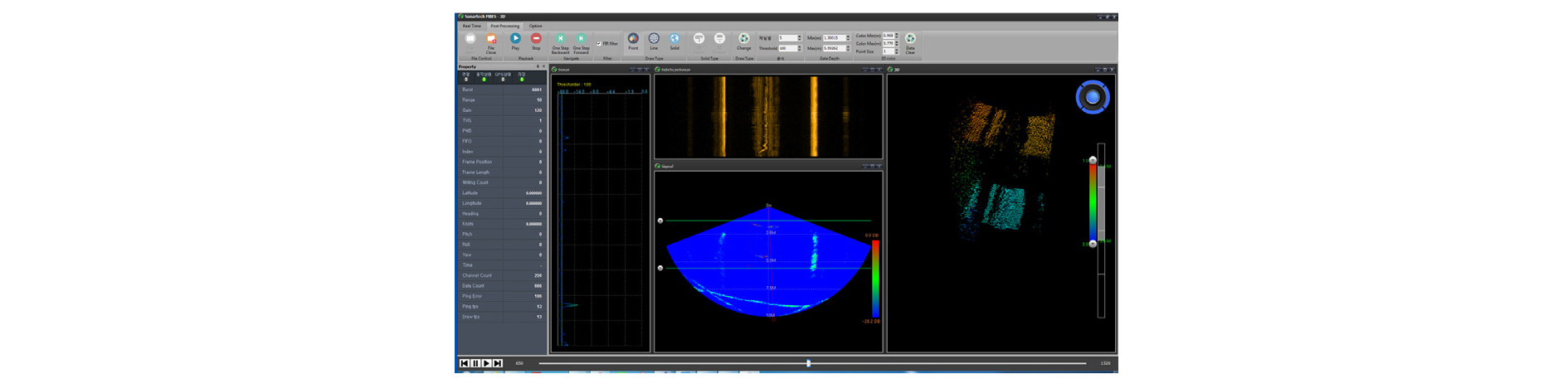
Fig. 8은 굴착깊이 측정 소나의 운용개념을 나타낸 것으로 굴착깊이 측정 소나의 수신센서는 128채널을 가지며 455 kHz 송신 프로젝트로 음파를 송신한다. 굴착깊이 측정 소나에서 수신된 신호는 128채널의 각 채널 별로 데이터를 수신하여 증폭 및 필터링, A/D변환, 빔 포밍을 통해 가로축 한 라인의 데이터를 2D 이미지로부터 얻어내고 ROV가 이동하면서 데이터를 취득한 데이터를 순차적으로 영상으로 전시하면서 3D 영상을 만들어 전시한다. Fig. 9는 굴착깊이 측정 소나로 취득한 데이터로써 2D 영상에서 한 라인의 데이터를 취득하고 전시하며 2D 데이터를 순차적으로 전시하면 3D 영상으로 구현되는 것을 확인할 수 있다.
III. 어라운드 뷰 소나 및 굴착깊이 측정 소나 성능 검증 실험
본 논문에서는 어라운드 뷰 소나의 오버랩 영상 실험 및 굴착깊이 측정 소나의 최대 굴착깊이 측정 성능 검증을 위해 수조에서 실험을 수행하였다. 먼저 어라운드 뷰 소나의 Fig. 10과 같이 프레임에 실제 ROV에 장착되는 위치와 동일한 위치에 이미지 소나를 장착하고 크레인을 이용하여 수조에서 데이터를 취득하였다.
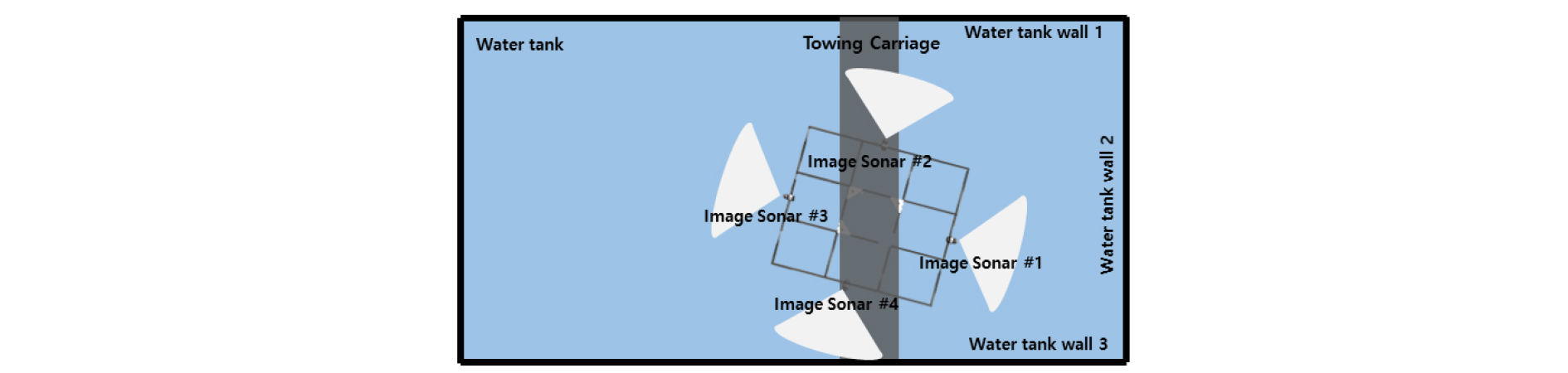
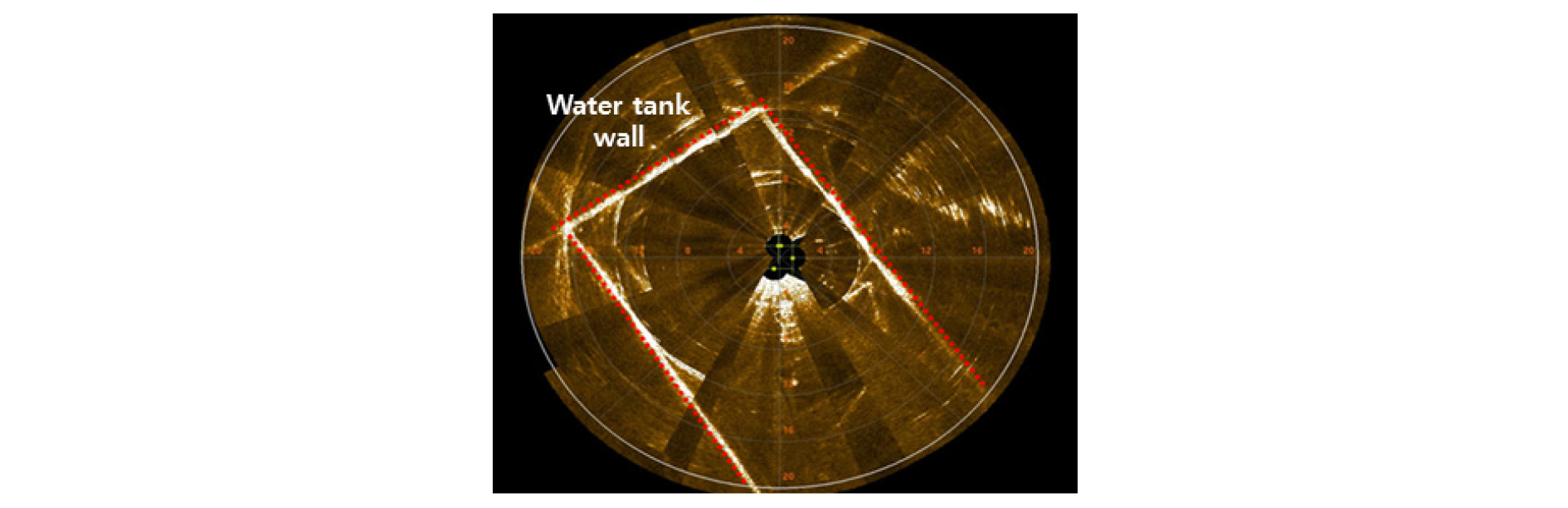
Fig. 11은 대형수조에서 취득한 데이터로써 20 m 거리 이내의 수조 벽면 3면이 소나영상으로 확인이 가능하며 오버랩되는 영역 또한 매끄럽게 연결되는 것을 확인할 수 있다(세로 방향의 벽면은 수조 크기가 50 m이므로 설정 거리 내외에 있어 소나 영상에서 확인이 되지 않았다).
다음으로 굴착깊이 측정 소나의 성능 검증을 위해 굴착된 형상의 지그를 제작 후 수조에서 측정하여 최대 굴착 깊이 2.5 m를 취득가능한지 여부에 대한 실험을 수행하였다. Fig. 12와 같이 폭 0.65 m, 깊이 2.5 m가 되는 프레임 지그를 만들고 굴착깊이 측정 소나로부터 약 1.5 m ~ 2.5 m 수직 거리에 설치하여 2.5 m 깊이 측정 성능을 검증하는 실험을 수행하였다.
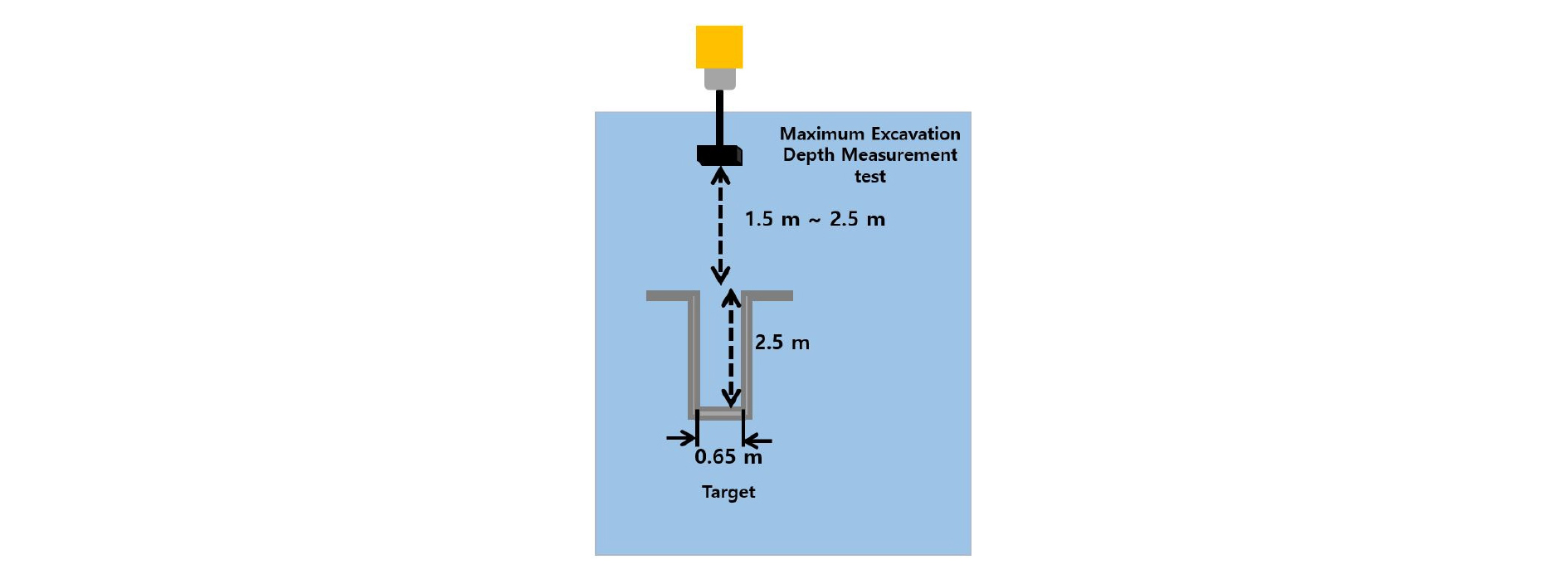
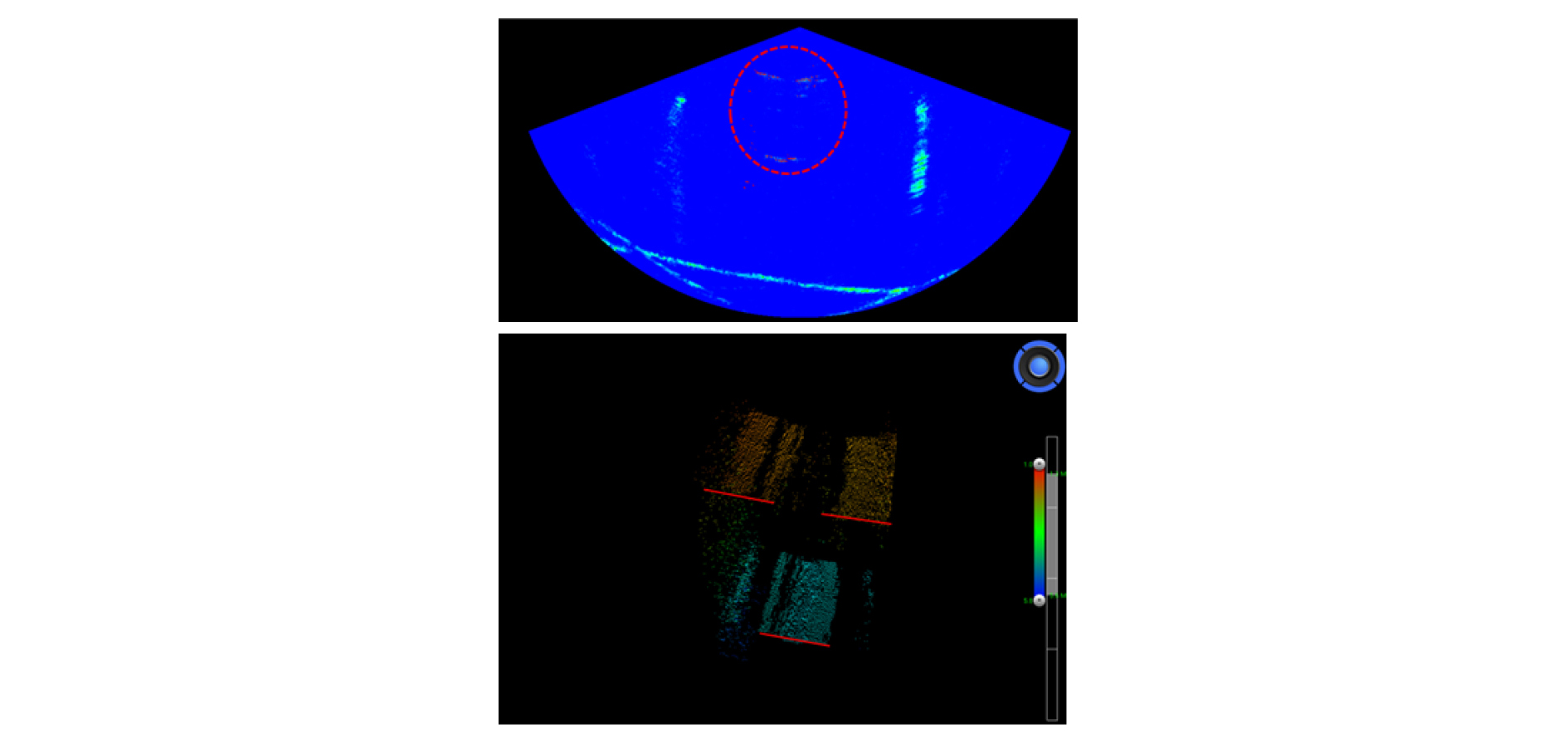
Fig. 13은 최대 굴착깊이 측정 실험에서 취득한 소나 영상으로써 2D 영상에서 원으로 표시된 부분 안쪽에 2.5 m 깊이의 프레임 지그 형상의 데이터 취득이 가능하였고 취득한 2D 데이터를 이용하여 3D로 표현가능함을 확인할 수 있었다.
위의 성능 실험들을 통해 어라운드 뷰 소나 및 굴착깊이 측정 소나의 성능을 만족함을 확인할 수 있었다.
IV. 어라운드 뷰 소나 및 굴착깊이 측정 소나 실해역 실험
본 실해역 실험은 위의 수조 실험에서 성능검증 후 실제 트랙기반 중작업용 ROV에 어라운드 뷰 소나 및 굴착깊이 측정 소나를 장착하여 동해 안에서 실험을 수행하였다.
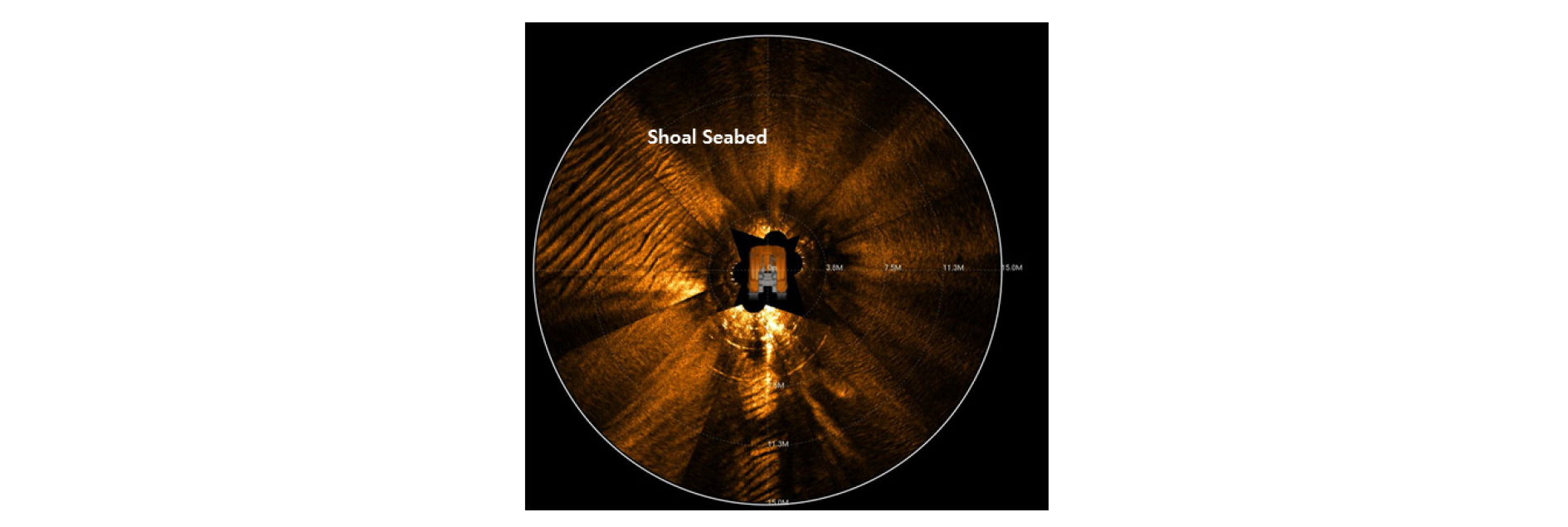
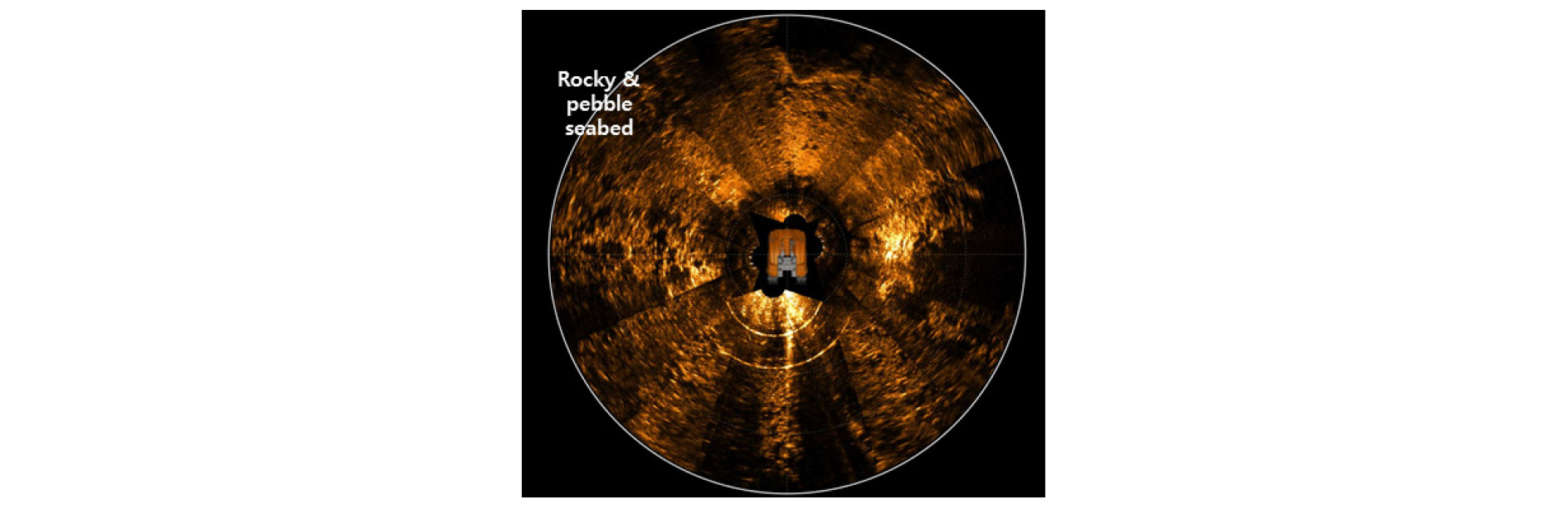
ROV를 진수하여 해저면에 착저하는 동안 ROV가 안전하게 착저 하기위해 어라운드 뷰 소나 및 굴착깊이 측정 소나 영상을 통해 ROV가 착저되는 해저면에 큰 암반이나 장애물 등이 있는지 모니터링 한 후 ROV가 운용 가능한 지형에 착저하여 실해역 실험을 수행하였다. 착저과정에서도 소나영상을 이용할 경우 안전하게 착저작업을 할 수 있음을 알 수 있었다. 그리고 실험을 수행한 실해역은 탁도가 비교적 높아 수중 카메라로 확인시 약 2 m 이내였으며, 굴착 작업시 부유물이 발생하여 수중 카메라로 1 m 거리의 물체를 인식하는 것이 어려웠다. 하지만 이러한 수중환경에서 어라운드 뷰 소나를 운용하면 ROV 전방 15 m ~ 30 m 거리의 지형이나 바위 등의 확인이 가능하였고, Figs. 14 ~ 16은 실해역에서 취득한 어라운드 뷰 소나 영상으로 모래톱 지형, 암반 지형, 굴착된 지형까지 구분됨을 확인할 수 있었다.

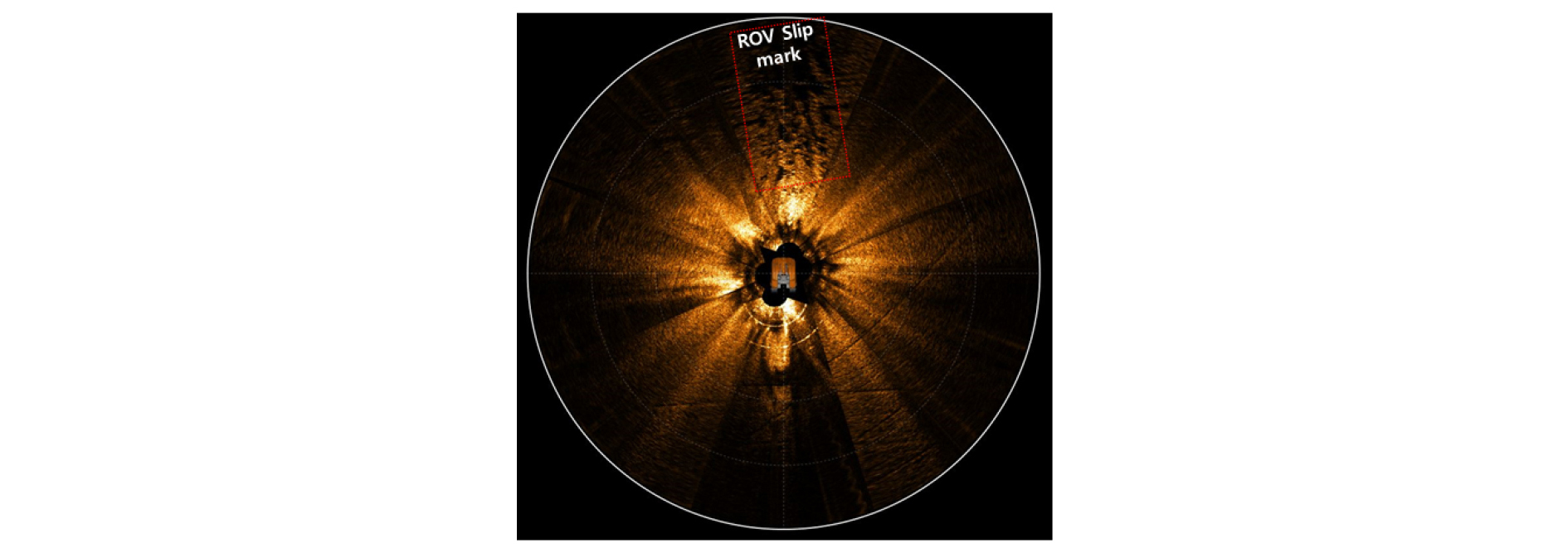
또한 중작업용 ROV의 무게(36 ton)가 무겁기 때문에 연약한 지형에서는 트랙이 묻혀 운행이 불가능한데 이를 소나영상을 통해 ROV가 슬립현상이 발생되는 것을 확인하여(Fig. 17) ROV를 신속하게 회수함으로써 안전한 운용이 가능함을 확인하였다.
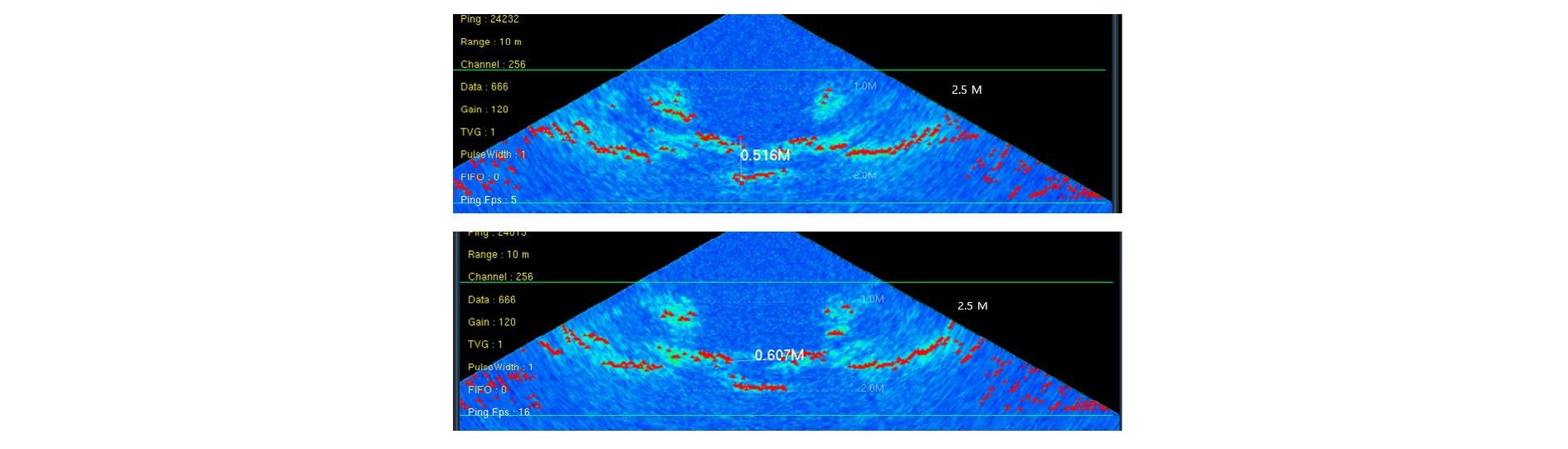
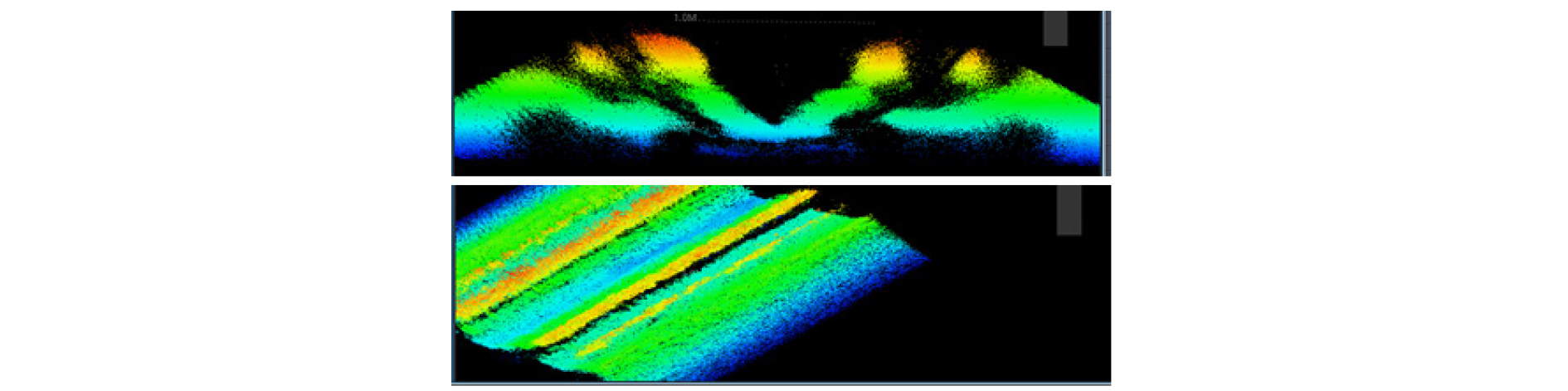
다음은 굴착깊이 측정 소나를 이용하여 굴착 깊이를 측정하기위해 ROV에 장착된 트렌칭 커터로 굴착을 한 뒤 굴착깊이 측정 소나로 굴착된 지형의 데이터를 취득하였으며, 정확히 측정이 되는지 확인을 위해 굴착된 지형의 폭과 깊이를 함께 측정하였고 Figs. 18, 19는 굴착된 지형의 폭과 깊이가 각각 0.6 m, 0.5 m 깊이로 굴착된 지형의 2D & 3D 데이터를 확인할 수 있었다(트렌칭 커터 폭 0.6 m, 굴착깊이 0.5 m).
V. 결 론
본 논문에서는 중작업용 수중건설로봇에 적용가능한 어라운드 뷰 소나 및 굴착깊이 측정 소나를 개발하여 수조 및 실해역에서 성능 검증 실험을 수행하였다. 어라운드 뷰의 경우 오버랩되는 영역에서 영상 혼합 알고리즘을 적용하여 소나영상이 매끄럽게 연결되는 것을 확인하였고, 굴착깊이 소나는 최대 굴착 깊이인 2.5 m까지 깊이 측정이 가능함을 확인하였다. 또한 탁도가 높은 실해역에서 소나를 운용시 탁도에 영향을 거의 받지 않으며 어라운드 뷰 소나 영상을 통해 ROV 전방의 해저 지형, 자갈, 암반 등을 확인할 수 있어 주행 중 장애물 회피하면서 운용할 수 있었다. 그리고 굴착깊이 측정 소나는 착저시 해저 지형을 미리 파악하여 ROV를 해저지형에 착저하는 작업을 안전하게 보조하는 역할을 할 수 있었으며, 실제 굴착된 지형의 폭과 깊이를 측정함으로써 어라운드 뷰 소나 및 굴착깊이 측정 소나를 ROV에 장착하여 실제 작업시 파일럿의 소나영상을 모니터링하여 작업 효율성을 높일 수 있음을 검증하였다.
